Abstract
In the realm of traffic sign detection, challenges arise due to the small size of objects, complex scenes, varying scales of signs, and dispersed objects. To address these problems, this paper proposes a small object detection algorithm, YOLOv8s-DDA, for traffic signs based on an improved YOLOv8s. Specifically, the C2f-DWR-DRB module is introduced, which utilizes an efficient two-step method to capture multi-scale contextual information and employs a dilated re-parameterization block to enhance feature extraction quality while maintaining computational efficiency. The neck network is improved by incorporating ideas from ASF-YOLO, enabling the fusion of multi-scale object features and significantly boosting small object detection capabilities. Finally, the original IoU is replaced with Wise-IoU to further improve detection accuracy. On the TT100K dataset, the YOLOv8s-DDA algorithm achieves mAP@0.5 of 87.2%, mAP@0.5:0.95 of 68.3%, precision of 85.2%, and recall of 80.0%, with a 5.4% reduction in parameter count. The effectiveness of this algorithm is also validated on the publicly available Chinese traffic sign detection dataset, CCTSDB2021.
1. Introduction
Traffic sign detection and identification is an essential research component in the application of computer vision and image classification in automatic driving and intelligent transportation systems with a wide range of applications. Accurately detecting and recognizing traffic signs can help drivers or automatic driving systems obtain critical information in a timely manner, thus enhancing road safety. Any sign that fails to be accurately recognized may cause the system to make wrong decisions and threaten driving safety. Improving the detection precision and accuracy of small object traffic signs will significantly reduce the number of traffic accidents caused by failing to recognize critical signs. In addition, accurately identifying traffic signs can help traffic management systems optimize vehicle flow and traffic signal control, reduce traffic congestion, and improve road access efficiency. Studies have shown that a system that accurately recognizes traffic signs and responds in a timely manner can optimize traffic flow by 5–10%, especially during peak hours, and help reduce traffic congestion. However, because the current images for traffic sign object detection have problems such as small objects, complex scenes, different sign scales, and scattered objects, there is still a great challenge to accurately and quickly complete the detection of traffic signs.
Traditional traffic sign detection algorithms and deep learning-based object detection algorithms are the two main categories of traffic sign detection methods [1]. Conventional algorithms for recognizing traffic signs mostly concentrate on feature extraction and categorization. Given the unique shapes and prominent colors, early researchers proposed many traffic sign detection methods based on handcrafted features [2,3,4,5]. However, these methods are expensive when it comes to human resources and difficult to adapt to current times, and their application in practical tasks is limited.
Deep learning-based object recognition systems now fall into two categories: one-stage detection algorithms and two-stage detection algorithms. A few examples of one-stage detection algorithms include the SSD series [6], EfficientDet [7], and the YOLO series [8,9,10,11,12,13]. R-CNN [14], SPPNet [15], Fast R-CNN [16], Faster R-CNN [17], Mask R-CNN [18], Cascade R-CNN [19], and D2Det [20] are a few examples of two-stage detection methods. Although the accuracy is often lower, one-stage detection algorithms perform faster than two-stage detection algorithms in terms of detection speed. On the other hand, a variety of convolutional neural network training techniques have emerged in recent years, greatly increasing the detection accuracy of one-stage detection methods. For traffic sign identification, the one-stage detection approach has become the standard; however, the YOLO series algorithms offer even quicker and more precise detection.
The most recent algorithm in the YOLO family is YOLOv10; as a new version, it introduces many improvements and optimizations, but YOLOv8 still maintains unique advantages. First, YOLOv8 has faster inference and training speed, which makes YOLOv8 more suitable for real-time applications that require fast response. Second, the computing needs and number of model parameters for YOLOv8 are comparatively low, which makes it suitable for running in environments with limited computational resources, and a relatively simple architecture makes it is easier to train and deploy and requires less computational resources and memory. Finally, YOLOv8 has been extensively tested and applied, and has proven its stability and reliability in various real-world scenarios. To overcome the present issues with traffic sign object detection, this work uses YOLOv8s as its foundation and suggests YOLOv8s-DDA, an improved small object detection technique. To tackle issues such as complex traffic sign scenes, small objects, varying object scales, and scattered objects, this paper introduces the C2f-DWR-DRB structure. By incorporating a Dilated Reparam Block (DRB) into the Dilation-wise Residual Module (DWR), the network’s capability to capture multi-scale contextual information is significantly enhanced, while maintaining efficient feature extraction and reducing computational complexity during the inference phase. In the aspect of feature fusion, YOLOv8s-DDA adopts the concepts from ASF-YOLO to improve the neck network, using multi-scale and spatial picture information to improve tiny item detection precision. Furthermore, the Wise-IoU loss function takes the role of the traditional loss function. The dynamic non-monotonic focusing method of Wise-IoU guarantees that anchor boxes obtain the proper gradient gains, which helps to prevent typical problems during deep neural network object identification training such as gradient disappearing or bursting. It is imperative that traffic signs be detected and recognized with high precision because this directly affects the vehicle’s decision-making capacity. Metrics such as mean Average Precision (mAP) are often used to evaluate the performance of detection algorithms, with mAP@0.5 being a standard benchmark where a value above 85% is typically desirable [21]. Experiments and comparison testing on the TT100K dataset [22] were carried out to confirm the algorithm’s efficacy. The performance of the proposed the results show that the YOLOv8s-DDA model outperforms the original model, with an increase in mAP@0.5 to 87.2% and a decrease in the quantity of parameters.
The traffic sign detecting system’s detection speed must operate in real time to avoid delays that may lead to accidents, and the processing time for each frame is usually less than 20 ms per frame to ensure high speed and smooth operation [23]. The improved algorithm achieves an FPS of 125, which means that the processing time for each frame is about 8 ms, which is in line with the requirements for real-time detection. To sum up, when compared to the current mainstream models, the YOLOv8s-DDA algorithm performs better in terms of accuracy and speed of detection. The following are the contributions made by this paper:
- In order to solve the multi-scale issues and lower the number of parameters, distributed objects, and complicated scenes in traffic sign detection, the C2f-DWR-DRB structure is presented.
- The ASF-YOLO neck network’s implementation greatly improves the ability to detect small objects in traffic signs.
- The algorithm’s detection capacity is further enhanced using the Wise-IoU loss function.
2. Related Works
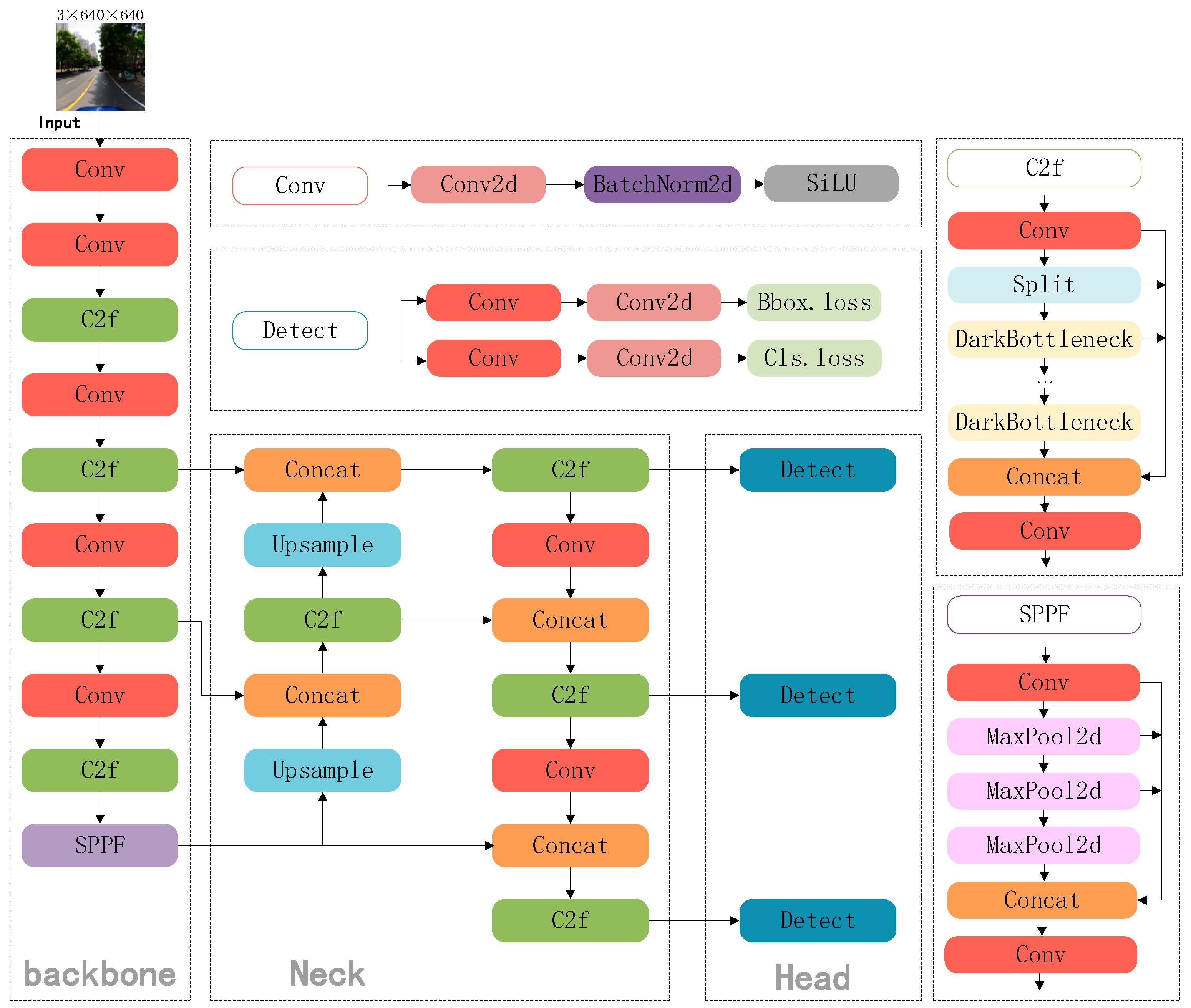
The YOLOv8 algorithm is currently one of the most advanced convolutional neural network algorithms, renowned for having a high accuracy and quickness of detection. Its structure is divided into the input end, the feature extraction network (Backbone), the feature fusion network (Neck), and the output end. The input end uses Mosaic data augmentation; it takes four photographs at random and applies random scaling, cropping, and layout. This approach improves the robustness of the network by adding several little item objects and enriching the dataset. The Backbone consists of Conv, C2f, and SPPF modules. The C2f module performs cross-level connections through multiple branches to obtain richer gradient flow information, forming a feature extraction module with enhanced feature representation capabilities. The Neck reinforces the fusion of features at various scales by use of PANet (Path Aggregation Network). The output end performs post-processing operations to retrieve the final object detection results and creates tensors with the predicted bounding box coordinates, confidence scores, and class probabilities. Figure 1 depicts the YOLOv8 algorithm’s overall network structure.
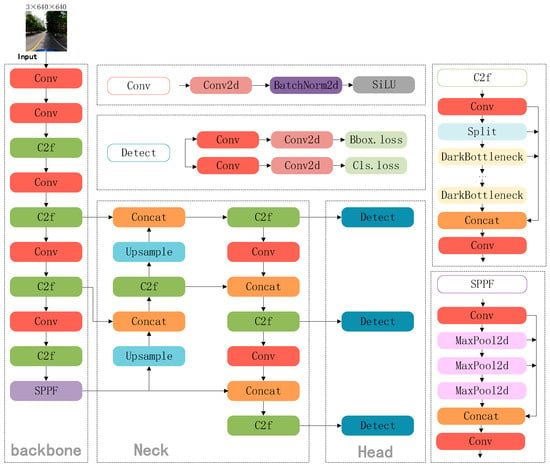
Figure 1.
YOLOv8 network configuration.
2.1. Feature Extraction
The Conv, C2f, and SPPF layers make up the Backbone of the YOLOv8 network, which is the central part of the network design utilized for feature extraction. In order to give the detection header rich semantic information, the main job of the backbone network is to extract multi-layered information from the input image. Multiple convolutional, pooling, and activation function layers are typically present. The architecture of these layers is designed to extract deeper features while gradually shrinking the feature map. Feature extraction is the process of extracting important and representative characteristics from an input picture so that the network can find and identify objects more accurately [9,10].
The detection results are greatly influenced by the quality of the feature extraction structure, and many researchers are now focusing their research efforts on backbone network optimization. The fundamental unit of a neural network is the Conv layer. By sliding the filter over the image, the conv layer can capture the local information and be used to extract the local features in the image, so many researchers improve the backbone network by improving the conv layer to increase the backbone network’s capacity. For example, Du et al. [24] accelerated feature extraction by using a novel convolutional module SPD, which distributed spatial information into the depth channel, enlarged the sensory field of the model, and effectively improved the capacity of the model to recognize traffic indicators at different scales and reduced missed detections. Xie et al. [25] replaced the Conv module in the backbone with GhostConv and employed linear operations that were economical to generate additional feature maps and lower the computational cost of the model. Han et al. [26] used GhostNet in their feature extraction architecture, thus effectively reducing the number of parameters and weights of the model, while improving the feasibility of practical deployment of the model. The C2f module reduces computation and memory footprint by segmenting the feature maps and fusing them at different stages while maintaining the feature representation capability. Improving the C2f module’s functionality can help boost the network’s performance, e.g., in order to improve the feature extraction capacity of small objects such as traffic signs, Shi et al. [27] suggested the Cross-Stage Attention Network Module (CSPCA) in place of the C2f module. In order to extract spatial features more quickly and efficiently and to improve small sign detection, Chen et al. [28] built the C2f Faster module, which replaces the C2f in the header; additionally, to enhance tiny sign detection, a TOD layer is created and added to the backbone’s initial C2f layer. The C2f-DCA-Faster module was created by Peng et al. [29], and efficiently lowers the number of network parameters while simultaneously improving the network’s capacity to gather spatial position data. Through multi-scale feature pooling, the SPPF layer improves the capability of feature representation. This layer’s feature representation capability can increase the model’s detection accuracy by gathering more contextual data, especially when dealing with objects of different sizes. Additionally, many researchers are concentrating on enhancing the SPPF module, e.g., Cui et al. [30] introduced a novel hybrid spatial pyramid pooling module (H-SPPF) to capture a more comprehensive context. In order to capture a richer multi-scale feature, Xie et al. [25] proposed an expanded large sensory field-SPPF (GRF-SPPF) module, which substitutes the original SPPF module.
2.2. Feature Fusion
To improve the model’s ability to recognize things at different sizes, the primary function of YOLOv8’s Neck is to further analyze and merge the features taken from the Backbone. Researchers have also suggested ways to enhance the Neck network’s structure, and by making every structure in the Neck network better, YOLOv8’s capacity to recognize traffic signs has also significantly increased. For example, a multi-scale module was incorporated by Peng et al. [29] into the network’s neck layer, enhancing the resilience of the information fusion process and allowing for the extraction of several features at distinct spatial scales. Xie et al. [25] designed a new SPAnet architecture to enhance the path aggregation capability. The issue of tiny target features gradually becoming weaker after repeated downsampling and pooling operations was successfully addressed by Yan et al. [31] by using wavelet transform decomposition to combine high- and low-frequency data into PANet for multi-scale feature fusion. Additionally, an enhanced feature pyramid network led by the attention fusion algorithm AFPN was proposed by Wang et al. [32].
3. Methods
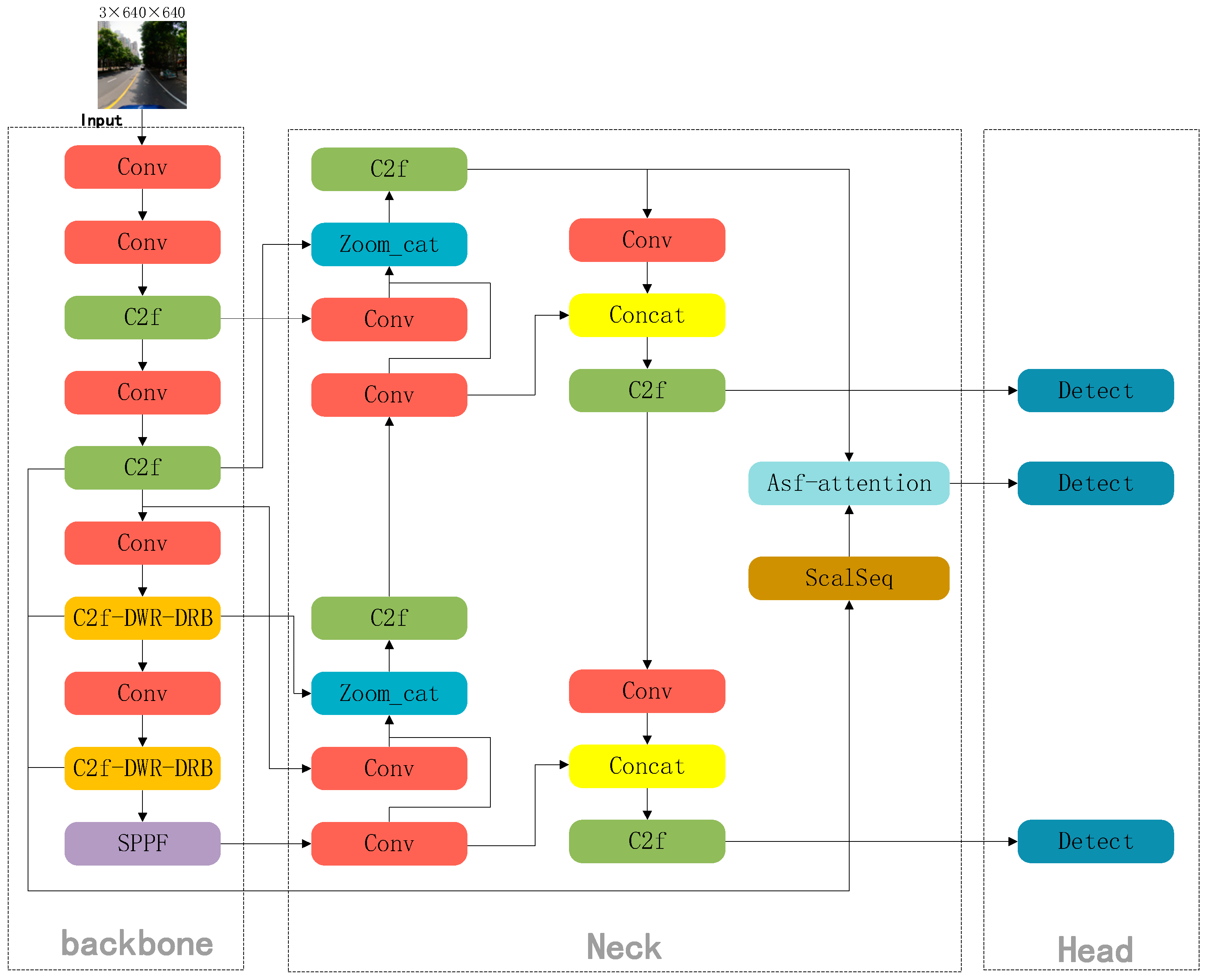
This study proposes YOLOv8s-DDA, a tiny object detection method based on YOLOv8s, to address three elements of traffic sign identification issues: feature extraction, feature fusion, and loss function. First, the C2f-DWR-DRB module enhances the C2f module in YOLOv8s by combining the benefits of dilation convolution, small- and large-kernel convolution, and convolution to reduce the computational complexity of the inference stage and offer a better feature representation while preserving effective feature extraction. Second, the ASF-YOLO network concept is applied to enhance the network’s neck by combining useful data from various scales. This allows for a more thorough comprehension of the visual material and improved processing of small objects and complicated scenery. Ultimately, the original loss function is replaced with the Wise-IoUv3 loss function to direct parameter adjustment. Consequently, training is optimized and the model’s ability to handle samples of different qualities is improved. The total network structure of the improved YOLOv8s-DDA algorithm is shown in Figure 2.
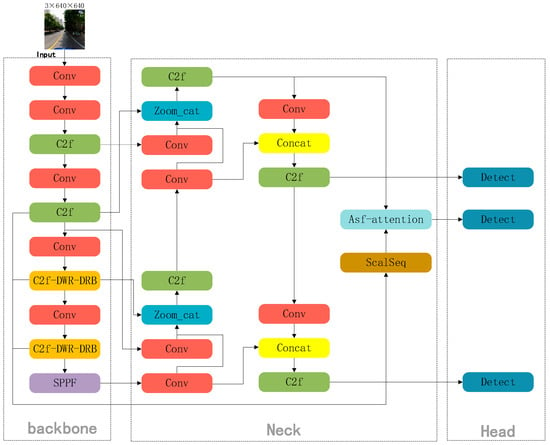
Figure 2.
YOLOv8s-DDA network configuration.
3.1. C2f-DWR-DRB
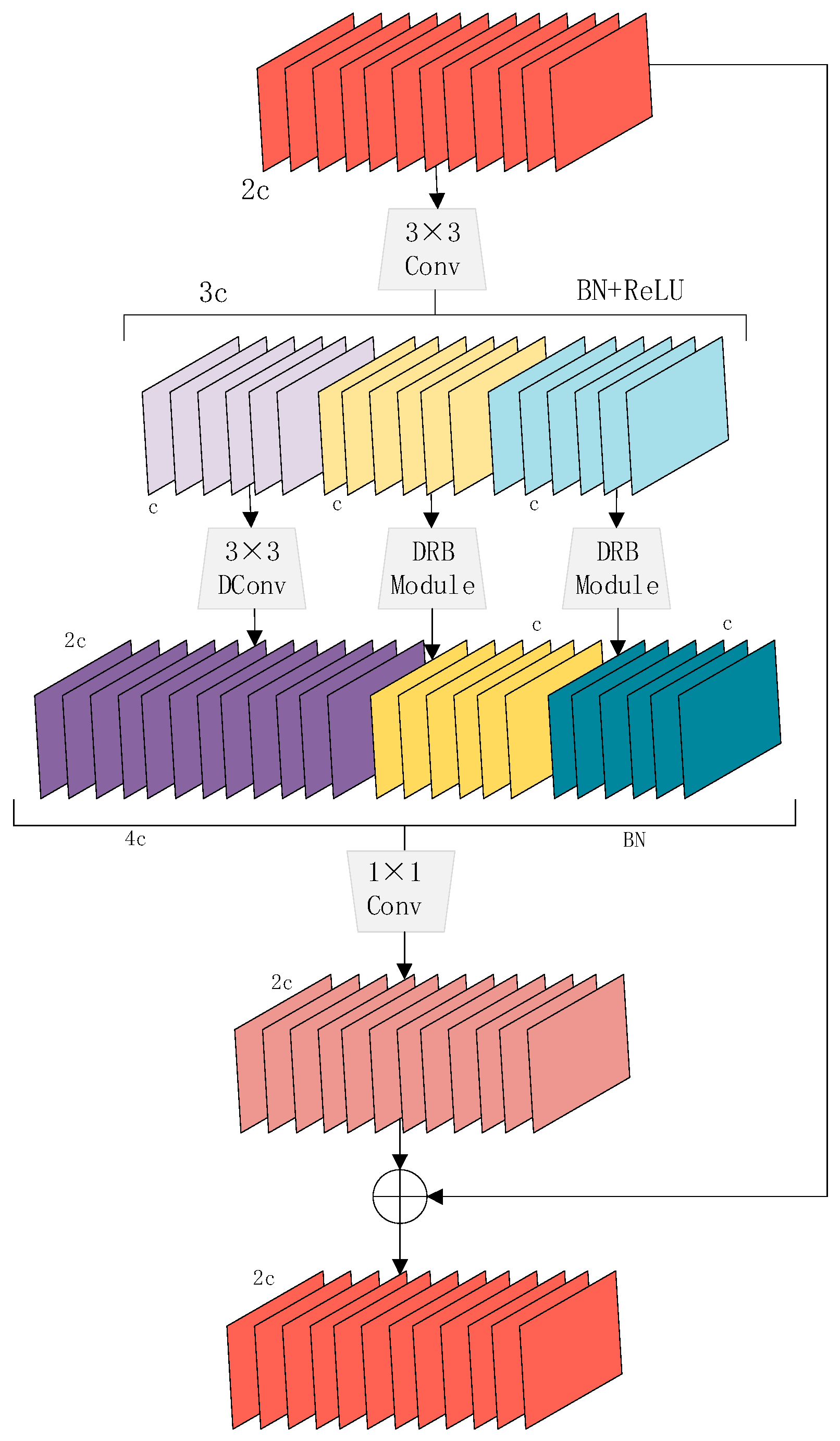
The C2f-DWR-DRB module significantly enhances the capacity of the network in multi-scale contextual information capture by introducing the Dilated Reparam Block in the Dilation-wise Residual Module. It integrates the benefits of small- and large-kernel convolution and dilated convolution, and keeps the efficient feature extraction while simplifying the inference stage’s computational complexity, providing higher quality feature representation, and optimizing the computational efficiency of the inference stage. Experimental results show that the C2f-DWR-DRB structure achieves higher accuracy and efficiency in the object detection task, especially when dealing with complex sparse patterns.
An effective two-step multi-scale context information collecting method is used by the C2f-DWR-DRB module. To reduce the collection challenges, the previous single-step multi-scale context information acquisition strategy is specifically divided into two steps. Step I. region residualization. Residual features are generated from the input features, and in the second stage, morphological filtering is carried out using the set of succinct feature maps produced in this step, which take the shape of areas of different sizes. A 3 × 3 convolution, the Batch Normalization (BN) layer, and the ReLU activation function are used to implement this method. Initial characteristics are extracted using 3 × 3 convolution, and then the region features are activated and condensed using the ReLU activation algorithm. Step II. semantic residualization. Morphological filtering is performed for region features of different sizes using a deep convolution with an expansion rate of 1 and the Dilated Reparam Block. To improve the feature capture capability, we keep the convolution layer with an expansion rate of 1 and replace the convolution layers with an expansion rate of 3 and 5 with the Dilated Reparam Block. Morphological filtering enables the application of only one desirable receptive field to each channel feature, hence preventing possibly redundant receptive fields.
With this two-step approach, the role of deep convolution from complex semantic information acquisition is changed so that it only needs to perform morphological filtering on succinctly expressed feature maps, as shown in Figure 3. The feature maps in the form of regions simplify the role of deep convolution to morphological filtering, which standardizes the learning process and enables more efficient acquisition of multiscale contextual information. Upon obtaining the multi-scale contextual data, several outputs are combined. To construct the final residuals, each feature map is concatenated, followed by batch normalization and point-by-point convolution that fuses the features together. To provide a more comprehensive and trustworthy feature representation, the final residuals are added to the input feature maps.
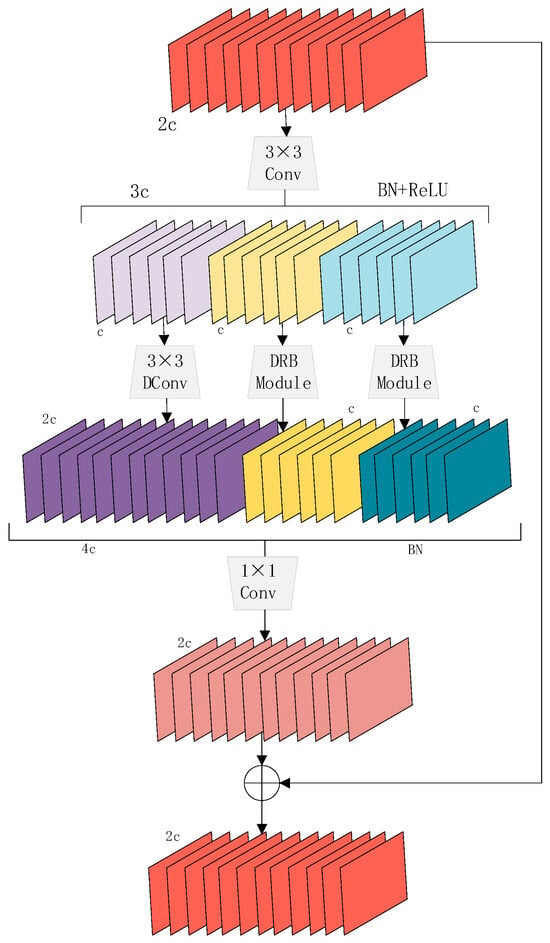
Figure 3.
C2f-DWR-DRB Module.
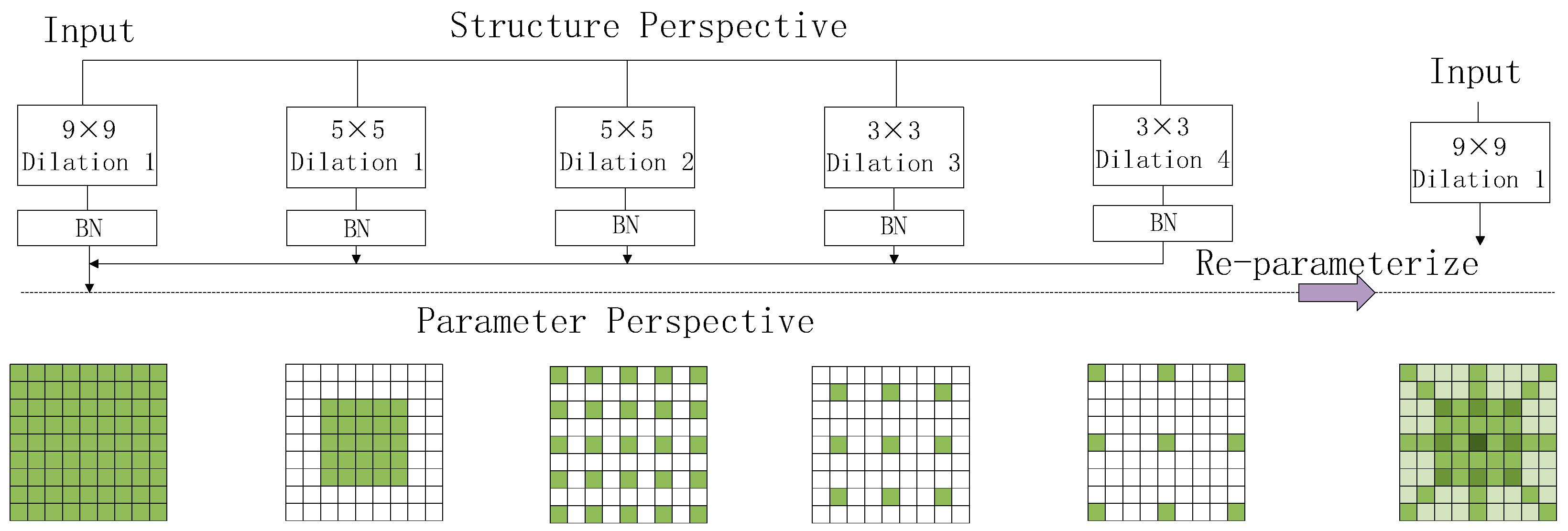
One of them, Dilated Reparam Block, is a dilated convolutional module, as shown in Figure 4, which enhances the feature extraction capability of convolutional neural networks by combining large-kernel convolution and small-kernel convolution in parallel [33]. Convolutional kernels of various sizes are used in the design to capture features with sparse patterns and varying spatial scales. Convolutional layers are then combined into a single convolutional layer during the inference stage using the structural reparameterization method, which enhances feature quality while preserving computational efficiency.
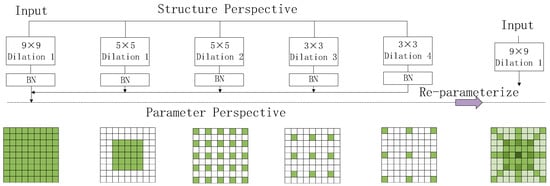
Figure 4.
Dilated Reparam Block.
The three main hyperparameters are the expansion rate (r), the size of the big kernel (k), and the dimensions of the parallel convolutional layers (k). Four-parallel configurations are denoted as k = 9, r = (1, 2, 3, 4), and k = (5, 5, 3, 3). For higher values of k, additional expansion layers with larger core sizes or expansion rates can be employed. The kernel sizes and expansion rates for the parallel branches are adaptable, with the only condition being that (k − 1) r + 1 < k.
Using multi-scale convolutional kernels, large-kernel convolution is used to capture global patterns, small-kernel convolution is used to capture small-scale patterns, and dilation convolution (with dilation rate) is used to capture sparse patterns, i.e., relationships between distant pixels. The large kernel convolution and dilation convolution layers operate in parallel to extract features separately, and each of them is followed by a BN layer to normalize the outputs, which are then summed up. After training, the network structure is simplified by merging the BN layer into the corresponding convolutional layer. For the dilated convolutional layer, by switching the convolutional operation, the convolutional layer with dilation rate becomes an identical non-dilated convolutional layer, which allows multiple parallel convolutional layers to be merged into a single convolutional layer with a sparse, large kernel, enhancing the efficiency of the inference phase. For example, an expansive convolutional layer with expansion rate r and kernel size k has an equivalent non-expansive convolutional kernel size of (k − 1) r + 1. This design not only enhances the capacity to extract features from convolutional neural networks, but also simplifies the network structure and improves the computational efficiency in the inference stage through the reparameterization method.
3.2. Improved Neck
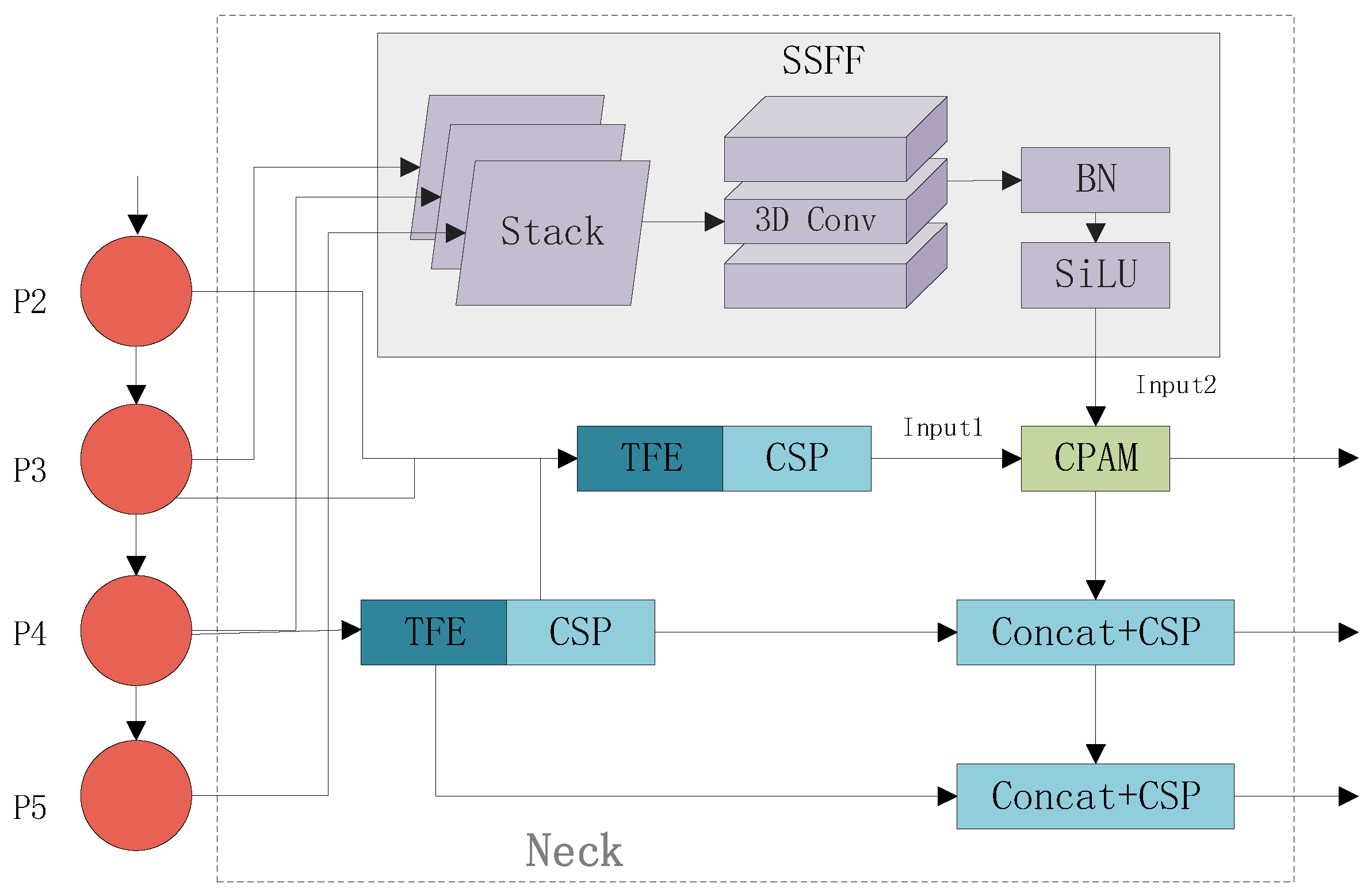
The ASF-YOLO model is a cellular image instance segmentation framework that combines spatial and multi-scale features and aims to increase the precision of small object segmentation by combining local and global feature data [34]. The main components of the neck of the framework include the SSFF module and TFE module, and the positional attention mechanism CPAM, as shown in Figure 5.
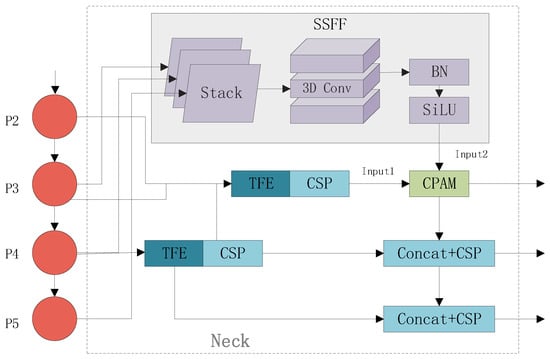
Figure 5.
Improved Neck structure.
To capture different spatial scale elements of an image, the Scale Sequence Feature Fusion (SSFF) module fuses global or high-level semantic information from multi-scale images. Traditional approaches have addressed the multi-scale challenge by employing a feature pyramid structure for feature fusion, typically using simple additive or concatenation methods. However, the SSFF module enhances this process by effectively combining multi-scale feature maps—melding the high-level details from deeper feature maps with the finer details from shallower ones. It applies Gaussian smoothing to multi-scale feature maps (P3, P4, P5) derived from the backbone network, then horizontally concatenates these maps and extracts their scale-sequence features through 3D convolution. The SSFF module is built on the high-resolution feature map (P3) level since it contains vital information for identifying and segmenting small objects. In order to create scale sequence features, the module merges P4 and P5 using 3D convolution after scaling them to match P3’s size.
The Triple Feature Encoder (TFE) module improves small object detection by capturing localized details and fusing multi-scale features. It enhances recognition of densely packed small objects by analyzing shape and appearance variations across different scales. Initially, the module modifies the feature map channels before processing large-scale feature maps via convolution, followed by downsampling through max pooling and average pooling. For smaller feature maps, upsampling is achieved using nearest neighbor interpolation. Ultimately, the module integrates large, medium, and small feature maps, yielding enhanced feature representations for more accurate detection.
The Channel and Position Attention Mechanism (CPAM) module effectively integrates fine-grained and multi-scale features derived from the SSFF and TFE modules by leveraging both channel-specific and spatial attention mechanisms. The channel attention mechanism assigns importance to individual channels through global average pooling followed by two fully connected layers. Meanwhile, the spatial attention mechanism maintains the spatial structure by applying pooling operations along both the horizontal and vertical dimensions. This dual-attention approach allows CPAM to selectively emphasize crucial spatial and channel-related information, thereby enhancing segmentation accuracy.
The model begins by merging the P3, P4, and P5 feature maps derived from the backbone network. The SSFF module is then employed to combine multi-scale features through 3D convolution, while the TFE module enhances the representation of small objects by concatenating feature maps of different spatial sizes—large, medium, and small. This approach allows for capturing intricate details across scales, significantly improving the model’s ability to detect small objects. Lastly, CPAM is applied to the P3 branch to leverage both high-level multi-scale features and detailed information, ultimately improving detection precision.
3.3. Wise-IoU
The accuracy of object detection within a dataset is evaluated using the Intersection over Union (IoU) metric, which assesses how closely predicted bounding boxes align with actual objects. IoU provides a quantitative measure of the overlap between predicted and ground truth boxes, allowing for the evaluation of the precision of detection. In the object detection task, IoU represents some ratio of predicted boxes to actual boxes with the following formula:
For the base IoU, if the two frames do not intersect, IoU = 0, which does not reflect the magnitude of the distance between the two (overlap). In addition, since no gradient back propagation can be generated when loss = 0, this results in no learning or training.
Object recognition is a fundamental problem in computer vision, and the architecture of the loss function determines how well this task performs. Object identification models can work much better when the bounding box loss function is well-defined. An essential part of the loss function for object detection is the bounding box loss function [35]. Recent work has mostly assumed high-quality training data and concentrated on enhancing the fitting capabilities of the bounding box loss. However, the object identification training set contains low-quality instances as well. Improving the model’s performance is clearly impacted if the bounding box’s regression is only enhanced on these cases. Focal-EIoU was proposed to solve this problem, but because its focusing mechanism is static, it has not been able to fully use the promise of the non-monotonic focusing mechanism [36]. From this perspective, Wise-IoU presents a dynamic non-monotonic focusing mechanism that offers an optimum gradient gain allocation approach, and uses the “outlier degree” instead of the IoU to assess anchor frame quality. By doing this, Wise-IoU can concentrate more on medium-quality anchors and enhances the detector’s overall performance. It also lessens the competition from high-quality anchors and the detrimental gradients from low-quality examples. We next describe the mathematical derivation process of Wise-IoU.
Firstly, the distance–attention mechanism (Equation (3)) is constructed to expand the model’s capacity for generalization, reduce the influence of geometric factors when the anchor and object frames overlap, and reduce the interference during the training process. As a result, the Wise-IoU v1 containing the dual attention mechanism is obtained:
The coordinates x and y represent the center of the anchor box, while xgt and ygt represent the center of the ground truth box. Wg and Hg are the width and height of the ground truth box, respectively. To prevent gradients from from negatively impacting convergence, Wg and Hg are removed from the computation graph, as indicated by the superscript * symbol. ∈ [1, e), significantly increasing the for average-quality anchor boxes, while ∈ [0, 1], reducing for high-quality anchor boxes. When there is strong overlap between the object and anchor boxes, the focus shifts to minimizing the distance between their centroids.
Focal Loss [37] effectively reduces the effect of simple examples on the loss value by constructing a monotonic focusing mechanism based on cross-entropy. This enables the model to focus on difficult cases and improve classification performance.
Similarly, we constructed and the monotonic focusing coefficient .
Later training phases see slower convergence because when declines during model training, the gradient gain also decreases. Thus, as a normalization factor, the mean value of was introduced:
is the sliding average with momentum m. Dynamically updating the normalization factor keeps the gradient gain overall at a high level, which solves the problem of slow convergence at the late stage of training.
Dynamic non-monotonic FM (focusing mechanism): anchor frame quality is characterized by the outlier, which is defined as: ∈ [0, +∞); a small outlier indicates a high quality of anchor frames, for which we assign smaller gradient gains to make the bounding box regression more concerned with ordinary quality anchor frames. By giving lower gradient gains to anchor frames with high outliers, low-quality examples are successfully prevented from producing large damaging gradients. We create a focusing factor that is not monotonic and utilize it with Wise-IoU v1:
The mapping of outlier β and gradient gain r is controlled by hyperparameters α and δ, respectively. Different models and datasets have different suitable hyperparameters, which need to be adjusted by themselves to find the optimal solution.
Wise-IoU integration with YOLOv8 is crucial. YOLOv8 is renowned for its accuracy and quickness, and Wise-IoU’s subtle gradient adjustments can improve its functionality even further. Throughout the training phase, the anchor frames are guaranteed to acquire the appropriate gradient gains thanks to the dynamic non-monotonic focus mechanism of Wise-IoU. This method helps reduce gradient vanishing or explosion, a common issue while teaching object identification to deep neural networks. Furthermore, Wise-IoU improves YOLOv8’s performance in intricate environments with overlapping objects of various sizes and aspect ratios by highlighting the precision of bounding box predictions. To raise the bar for object identification frameworks and enhance the model’s performance, Wise-IoU is incorporated into YOLOv8.
4. Experiments
4.1. Dataset Description
The TT100K dataset [22] was compiled and made publicly available by a joint lab at Tsinghua University and Tencent, who downloaded 100,000 high-resolution Street View images in 2048 × 2048 size from Tencent Maps data centers in five different cities in China, including city roads, highways, and countryside roads, covering street scenes in multiple cities in China, as well as a wide range of lighting and weather conditions to meet different application requirements. The dataset contains 30,000 traffic sign instances and 221 different types of road traffic signs. Certain traffic sign categories with few instances are deemed inadequate for ensuring successful model training. Consequently, only 45 traffic sign categories with more than 100 instances were chosen for additional analysis after the dataset was preprocessed to eliminate traffic sign categories with no labels or low frequency of occurrence. According to the definition of small objects by the International Society for Optics and Photonics (SPIE) [38], small objects make up 84% of the dataset. The training set has 6793 images, the validation set has 1949 images, and the test set has 996 images. Figure 6 illustrates the dataset category distribution, some of the target boxes, target location distribution, and target size distribution. Figure 7 shows the partial presentation of the dataset.
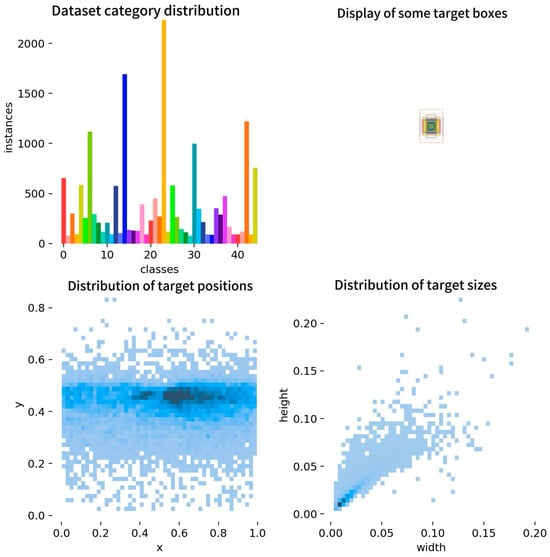
Figure 6.
TT100K dataset labeling information.

Figure 7.
Partial dataset presentation.
4.2. Implementation Details
The TT100K-train dataset is the training set, and the TT100K-val dataset is the validation set. During the training period, the initial learning rate is set to 0.01, and the final learning rate is set to 0.1. The number of threads is set to 8, the batch size is set to 8, and the number of epochs is set to 300. The specific configurations of the experimental environment are shown in Table 1.

Table 1.
Specific configuration of the experimental environment.
4.3. Evaluation Metrics
The experimental outcomes are evaluated using the following metrics: mAP@0.5, mAP@0.5:0.95, accuracy, and recall. The following formulas apply to all evaluation metrics:
In the formula, TP (True Positive), FP (False Positive), and FN (False Negative) represent the correct identification of a positive class, the incorrect identification of a negative class as positive, and the failure to identify a positive class, respectively.
4.4. Comparison Experiments of Wise-IoU
In order to further examine the impact of the loss function on the accuracy ground of the algorithm, in this paper, under the framework of the YOLOv8s-DDA algorithm, the new loss functions obtained by using different versions of Wise-IoU, and replacing the IoU in Wise-IoUv3 with the EIoU [39], GIoU [40], DIoU, CIoU [41], and SIoU [42] were used for comparative studies were carried out. Table 2 displays the outcomes of the experiment.
Table 2.
Comparison of experimental results for loss function. Best results are highlighted in bold.
From the table, after replacing the original IoU of YOLOv8s with Wise-IoUv3, the accuracy of mAP@0.5 and mAP@0.5:0.95 is significantly improved. To further explore the effect of different IoU on the experimental results, further experiments were carried out on Wise-EIoUv3 and so on, and finally the optimal IoU was obtained as Wise-IoUv3.
4.5. Ablation Experiment
In this paper, the YOLOv8s algorithm is used as the basic framework for ablation experiments using the TT100K dataset. Table 3 displays the ablation experiment findings for the parametric values, precision, recall, and mAP@0.5 and mAP@0.5:0.95.
Table 3.
Results of ablation experiments. Best results are highlighted in bold.
C2f-DWR-DRB: After replacing the C2f module in the backbone of YOLOv8s with the C2f-DWR-DRB module, the accuracy of the algorithm has been slightly improved, and the number of parameters has been somewhat reduced. The module adopts an efficient two-step multi-scale context information acquisition method, which significantly improves the network’s capability in feature extraction and optimizes the computational efficiency in the inference stage, in which the dilation reparameterization block utilizes convolution kernels with different scales to capture features with different spatial scales and sparse modes. At the same time, multiple convolutional layers are merged into a single one in the inference stage by the structural reparameterization method, so as to improve the feature quality while maintaining the computational efficiency while improving feature quality. The above experiments also verify that the C2f-DWR-DRB module achieves higher accuracy and efficiency in the task of detecting small objects of traffic signs.
ASF: After using the improved neck network structure, mAP@0.5 improved by 2.6%, the number of participants has risen somewhat, but not significantly. This neck network enhances small object detection accuracy by effectively combining both global and local features. It employs the Triple Feature Encoder (TFE) module to merge feature maps of varying scales, enriching the detailed information crucial for recognizing smaller objects. Additionally, the Scale Sequence Feature Fusion (SSFF) module is integrated to strengthen the extraction of multi-scale features. To further enhance feature representation, the Channel and Position Attention Mechanism (CPAM) is introduced, which focuses on essential channels and spatial locations linked to small objects. The combined efforts of SSFF, TFE, and CPAM lead to improved multi-scale feature extraction and more precise detection of small objects. The three components work in conjunction with each other to make the algorithm much more efficient in detecting small objects, and the experimental results validate the effectiveness of the improved neck network.
Wise-IoUv3: After using Wise-IoUv3 instead of the original CIoU in YOLOv8s, there was an improvement of 1.1%. Wise-IoU v3 provides a fine-grained gradient update to further improve the performance of YOLOv8s. This loss function reduces the common problems of gradient vanishing or gradient explosion, and the model’s efficiency can be improved by handling complicated scenarios with overlapping objects of different sizes and aspect ratios.
We utilize Figure 8 to illustrate the performance increase of YOLOv8s-DDA over the original algorithm. The top four images represent the detection results of the original algorithm YOLOv8s, while the bottom images represent the results of the YOLOv8s-DDA algorithm. It is clear that YOLOv8s-DDA can accurately detect the traffic signs missed by YOLOv8s.

Figure 8.
Detection result showcase.
4.6. Comparison of Different Detectors
This study compares the state-of-the-art small object detection algorithm YOLOv8s-DDA to several popular one-stage and two-stage detection methods in order to validate it. After training, the TT100K dataset is selected for testing and comparison, and mAP@0.5 is used as the evaluation metric. Table 4 displays all the results. The suggested YOLOv8s-DDA algorithm outperforms all others in the traffic sign detection test, according to the results.
Table 4.
Comparison of results of different algorithms on the TT100K dataset. Best results are highlighted in bold.
4.7. Generalization Experiment
In this paper, we conduct experiments on the publicly available dataset China Traffic Sign Detection Dataset CCTSDB2021 [47] to verify the generalization ability of YOLOv8s-DDA algorithm on different datasets. CCTSDB2021 is an open-source traffic sign dataset, created by a team of experts from Changsha University of Science and Technology, which contains nearly 20,000 traffic sign images involving nearly 40,000 traffic sign instances. These images are derived from real road driving scenarios in China, and most of them are taken from in-vehicle viewpoints, such as street photography and driving recorders, which provide researchers with valuable data resources of traffic scenarios. The dataset is meticulously categorized by size and scene, and rich road background information is incorporated. The training and test sets contain a total of 17,856 images and their labeling information, and are classified into three categories: prohibition signs, warning signs, and directional signs. According to the experimental results in Table 5, mAP@0.5 improved by 2.9% and mAP@0.5 improved by 6.1% compared to YOLOv8s. In summary, the YOLOv8s-DDA algorithm not only shows superior performance on the TT100K dataset, but also has high recognition accuracy and strong generalization ability on Chinese traffic sign detection dataset CCTSDB2021.
Table 5.
Experimental results on the CCTSDB2021 dataset. Best results are highlighted in bold.
5. Results
This research presents an improved small object detection algorithm, YOLOv8s-DDA, which is based on YOLOv8s to address the issues with traffic sign object detection and enhance the accuracy of traffic signs in object detection. This algorithm proposes the C2f-DWR-DRB module, which enhances the extraction capability of sparse objects and solves the problems of traffic sign object detection such as signs with different scales and scattered objects. The improved neck network in ASF-YOLO is introduced to enhance the network’s detection ability for small objects by utilizing high-level multi-scale features and detailed features. Finally, Wise-IoUv3 is selected to replace the original IoU through experimental comparison to further enhance the performance of the algorithm.
The experimental results indicate that the improved small object detection algorithm offers advantages such as increased detection accuracy and reduced parameter count. On the TT100K dataset, both mAP@0.5 and mAP@0.5:0.95 of the YOLOv8s-DDA algorithm improved by 4.0%, detection accuracy increased by 2.9%, recall rate increased by 6.4%, and the parameter count was reduced by 5.4%. Additionally, the accuracy on the publicly available Chinese traffic sign detection dataset CCTSDB2021 also improved.
Subsequent investigations will endeavor to enhance the algorithm’s efficacy by augmenting the precision of traffic sign identification. Simultaneously, strategies will be employed to reduce the number of model parameters, aiming for a more lightweight design suitable for deployment on low-power devices. Additionally, comprehensive studies will be conducted on detecting traffic signs under various challenging weather conditions, such as rain, snow, and fog. The goal is to strengthen the algorithm’s robustness and adaptability across diverse environments, ensuring stable and reliable performance in real-world applications.
Author Contributions
Conceptualization, M.N. and Y.C.; methodology, M.N. and J.L.; software, M.N.; validation, M.N., J.L., X.Q. and W.C.; formal analysis, M.N., Y.C. and J.L.; investigation, M.N. and Y.C.; data curation, M.N. and X.Q.; writing—original draft preparation: M.N.; writing—review and editing, M.N. and Y.C.; visualization, M.N.; supervision, M.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lillo-Castellano, J.M.; Mora-Jiménez, I.; Figuera-Pozuelo, C.; Rojo-Álvarez, J.L. Traffic Sign Segmentation and Classification Using Statistical Learning Methods. Neurocomputing 2015, 153, 286–299. [Google Scholar] [CrossRef]
- Ruta, A.; Li, Y.; Liu, X. Real-Time Traffic Sign Recognition from Video by Class-Specific Discriminative Features. Pattern Recognit. 2010, 43, 416–430. [Google Scholar] [CrossRef]
- Vitabile, S.; Pollaccia, G.; Pilato, G.; Sorbello, F. Road Signs Recognition Using a Dynamic Pixel Aggregation Technique in the HSV Color Space. In Proceedings of the Proceedings 11th International Conference on Image Analysis and Processing, Palermo, Italy, 26–28 September 2001; pp. 572–577. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Takaki, M.; Fujiyoshi, H. Traffic Sign Recognition Using SIFT Features. IEEJ Trans. Electron. Inf. Syst. 2009, 129, 824–831. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision–ECCV 2016, Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2016, arXiv:1506.02640. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Jocher, G.; Stoken, A.; Chaurasia, A.; Borovec, J.; NanoCode012; TaoXie; Kwon, Y.; Michael, K.; Changyu, L.; Fang, J.; et al. Ultralytics/Yolov5: V6.0-YOLOv5n “Nano” Models, Roboflow Integration, TensorFlow Export, OpenCV DNN Support; Version 6.0; Zenodo: Geneva, Switzerland, 2021. [Google Scholar] [CrossRef]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A Single-Stage Object Detection Framework for Industrial Applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade R-CNN: High Quality Object Detection and Instance Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1483–1498. [Google Scholar] [CrossRef]
- Cao, J.; Cholakkal, H.; Anwer, R.M.; Khan, F.S.; Pang, Y.; Shao, L. D2Det: Towards High Quality Object Detection and Instance Segmentation. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11485–11494. [Google Scholar]
- Soylu, E.; Soylu, T. A Performance Comparison of YOLOv8 Models for Traffic Sign Detection in the Robotaxi-Full Scale Autonomous Vehicle Competition. Multimed. Tools Appl. 2024, 83, 25005–25035. [Google Scholar] [CrossRef]
- Zhu, Z.; Liang, D.; Zhang, S.; Huang, X.; Li, B.; Hu, S. Traffic-Sign Detection and Classification in the Wild. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2110–2118. [Google Scholar]
- Gupta, R.; Kumar, P.; Sobti, P.; Kumar, B.; Shivam, Y.; Shukla, P. Efficient Real-Time Sign Detection for Autonomous Vehical in Hazy Environment Using Deep Learning Models. In Advanced Network Technologies and Intelligent Computing; Verma, A., Verma, P., Pattanaik, K.K., Dhurandher, S.K., Woungang, I., Eds.; Springer Nature: Cham, Switzerland, 2024; pp. 239–257. [Google Scholar]
- Du, S.; Pan, W.; Li, N.; Dai, S.; Xu, B.; Liu, H.; Xu, C.; Li, X. TSD-YOLO: Small Traffic Sign Detection Based on Improved YOLO V8. IET Image Process. 2024, 18, 2884–2898. [Google Scholar] [CrossRef]
- Xie, G.; Xu, Z.; Lin, Z.; Liao, X.; Zhou, T. GRFS-YOLOv8: An Efficient Traffic Sign Detection Algorithm Based on Multiscale Features and Enhanced Path Aggregation. Signal Image Video Process. 2024, 18, 5519–5534. [Google Scholar] [CrossRef]
- Han, Y.; Wang, F.; Wang, W.; Li, X.; Zhang, J. YOLO-SG: Small Traffic Signs Detection Method in Complex Scene. J. Supercomput. 2024, 80, 2025–2046. [Google Scholar] [CrossRef]
- Shi, Y.; Li, X.; Chen, M. SC-YOLO: A Object Detection Model for Small Traffic Signs. IEEE Access 2023, 11, 11500–11510. [Google Scholar] [CrossRef]
- Chen, Q.; Dai, Z.; Xu, Y.; Gao, Y. CTM-YOLOv8n: A Lightweight Pedestrian Traffic-Sign Detection and Recognition Model with Advanced Optimization. World Electr. Veh. J. 2024, 15, 285. [Google Scholar] [CrossRef]
- Peng, Y.; Chen, K.; Chen, Y.; Cui, Y. A Lightweight Context Aware Traffic Sign Detection Algorithm Based on YOLOV8-n. In Proceedings of the 2024 IEEE 2nd International Conference on Control, Electronics and Computer Technology (ICCECT), Jilin, China, 26–28 April 2024; pp. 1578–1583. [Google Scholar]
- Cui, Y.; Guo, D.; Yuan, H.; Gu, H.; Tang, H. Enhanced YOLO Network for Improving the Efficiency of Traffic Sign Detection. Appl. Sci. 2024, 14, 555. [Google Scholar] [CrossRef]
- Yan, B.; Li, J.; Yang, Z.; Zhang, X.; Hao, X. AIE-YOLO: Auxiliary Information Enhanced YOLO for Small Object Detection. Sensors 2022, 22, 8221. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Chen, Y.; Gu, Y.; Yan, Y.; Li, Q.; Gao, M.; Dong, Z. A Lightweight Vehicle Mounted Multi-Scale Traffic Sign Detector Using Attention Fusion Pyramid. J. Supercomput. 2024, 80, 3360–3381. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, Y.; Ge, Y.; Zhao, S.; Song, L.; Yue, X.; Shan, Y. UniRepLKNet: A Universal Perception Large-Kernel ConvNet for Audio, Video, Point Cloud, Time-Series and Image Recognition. arXiv 2024, arXiv:2311.15599. [Google Scholar]
- Kang, M.; Ting, C.-M.; Ting, F.F.; Phan, R.C.-W. ASF-YOLO: A Novel YOLO Model with Attentional Scale Sequence Fusion for Cell Instance Segmentation. Image Vis. Comput. 2024, 147, 105057. [Google Scholar] [CrossRef]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Zhang, Y.-F.; Ren, W.; Zhang, Z.; Jia, Z.; Wang, L.; Tan, T. Focal and Efficient IOU Loss for Accurate Bounding Box Regression. Neurocomputing 2022, 506, 146–157. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, S. Focaler-IoU: More Focused Intersection over Union Loss. arXiv 2024, arXiv:2401.10525. [Google Scholar]
- Zhaosheng, Y.; Tao, L.; Tianle, Y.; Chengxin, J.; Chengming, S. Rapid Detection of Wheat Ears in Orthophotos from Unmanned Aerial Vehicles in Fields Based on YOLOX. Front. Plant Sci. 2022, 13, 851245. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, X.; Li, J. EIoU: An Improved Vehicle Detection Algorithm Based on VehicleNet Neural Network. J. Phys. Conf. Ser. 2021, 1924, 012001. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression. In Proceedings of the AAAI Conference on Artificial Intelligence, Philadelphia, PA, USA, 27 February–4 March 2020; Volume 34, pp. 12993–13000. [Google Scholar] [CrossRef]
- Gevorgyan, Z. SIoU Loss: More Powerful Learning for Bounding Box Regression. arXiv 2022, arXiv:2205.12740. [Google Scholar]
- Kang, S.-H.; Park, J.-S. Aligned Matching: Improving Small Object Detection in SSD. Sensors 2023, 23, 2589. [Google Scholar] [CrossRef]
- Sun, Z.; Cao, S.; Yang, Y.; Kitani, K.M. Rethinking Transformer-Based Set Prediction for Object Detection. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 3611–3620. [Google Scholar]
- Sun, P.; Zhang, R.; Jiang, Y.; Kong, T.; Xu, C.; Zhan, W.; Tomizuka, M.; Li, L.; Yuan, Z.; Wang, C.; et al. Sparse R-CNN: End-to-End Object Detection with Learnable Proposals. In IEEE Transactions on Pattern Analysis and Machine Intelligence; IEEE: New York, NY, USA, 2021; pp. 14454–14463. [Google Scholar]
- Zhu, X.; Su, W.; Lu, L.; Li, B.; Wang, X.; Dai, J. Deformable DETR: Deformable Transformers for End-to-End Object Detection. arXiv 2021, arXiv:2010.04159. [Google Scholar]
- Zhang, J.; Zou, X.; Kuang, L.-D.; Wang, J.; Sherratt, R.S.; Yu, X. CCTSDB 2021: A More Comprehensive Traffic Sign Detection Benchmark. Hum.-Centric Comput. Inf. Sci. 2022, 12, 1–18. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).