
An Improved Prevention Strategy Based on Fault Probability Detection for Commutation Failure in Line-Commutated Converter-Based High-Voltage Direct Current Transmission Systems


Abstract
1. Introduction
2. Brief Description of the LCC–HVDC Control System and the Mechanism of CFPREV Control
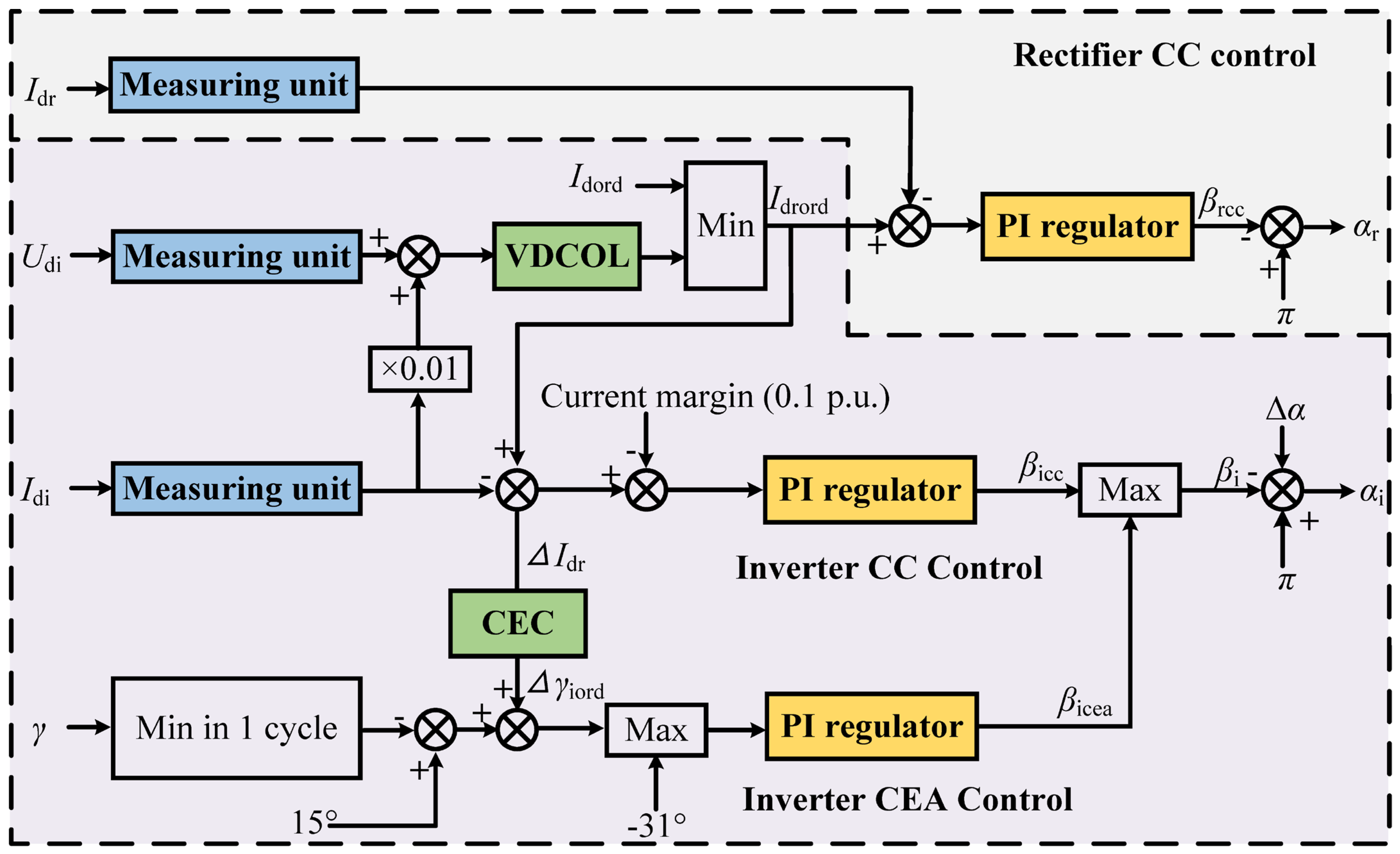
2.1. LCC–HVDC Control System
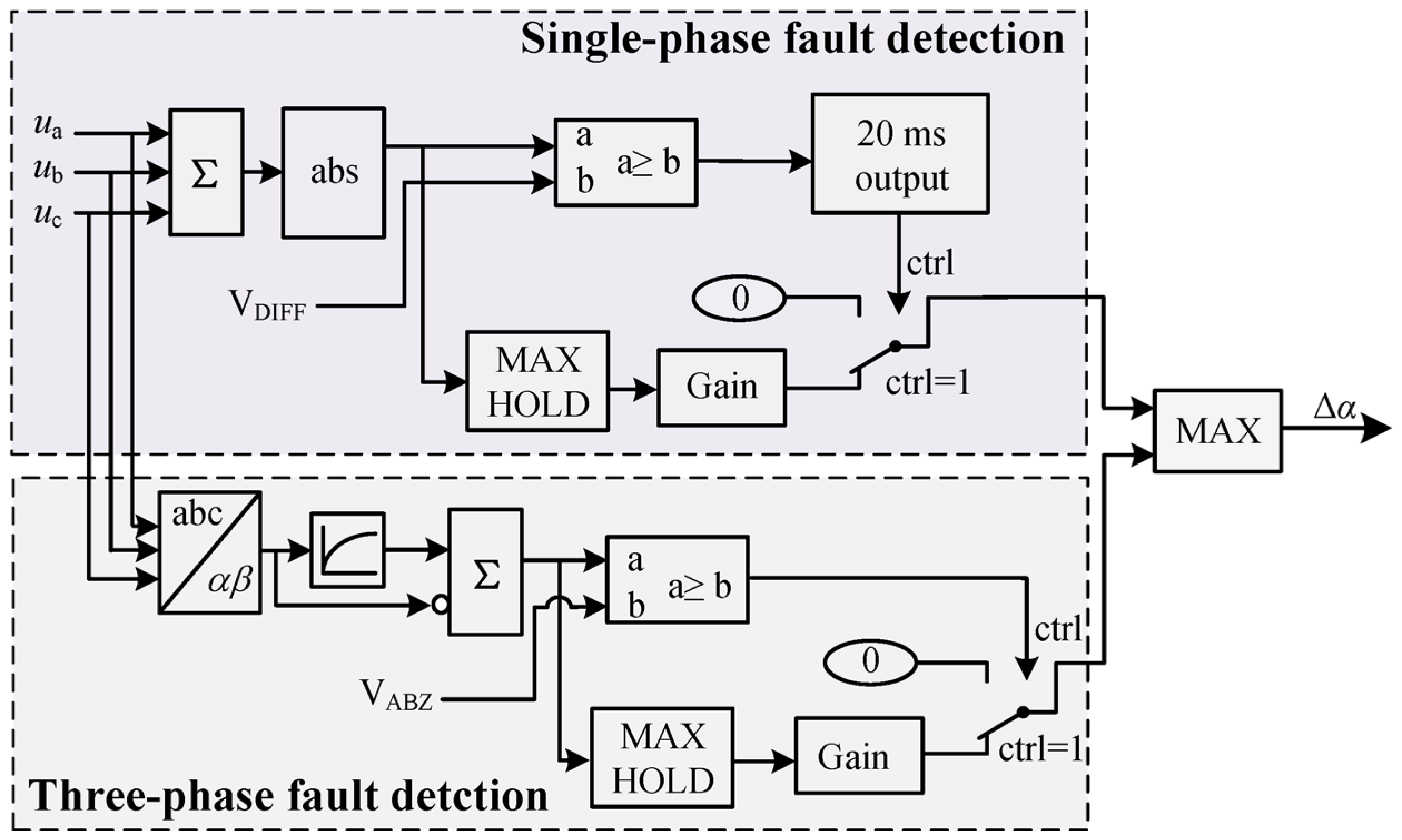
2.2. CFPREV Control
3. Improved Prevention Strategy Based on the Fault Probability Detection
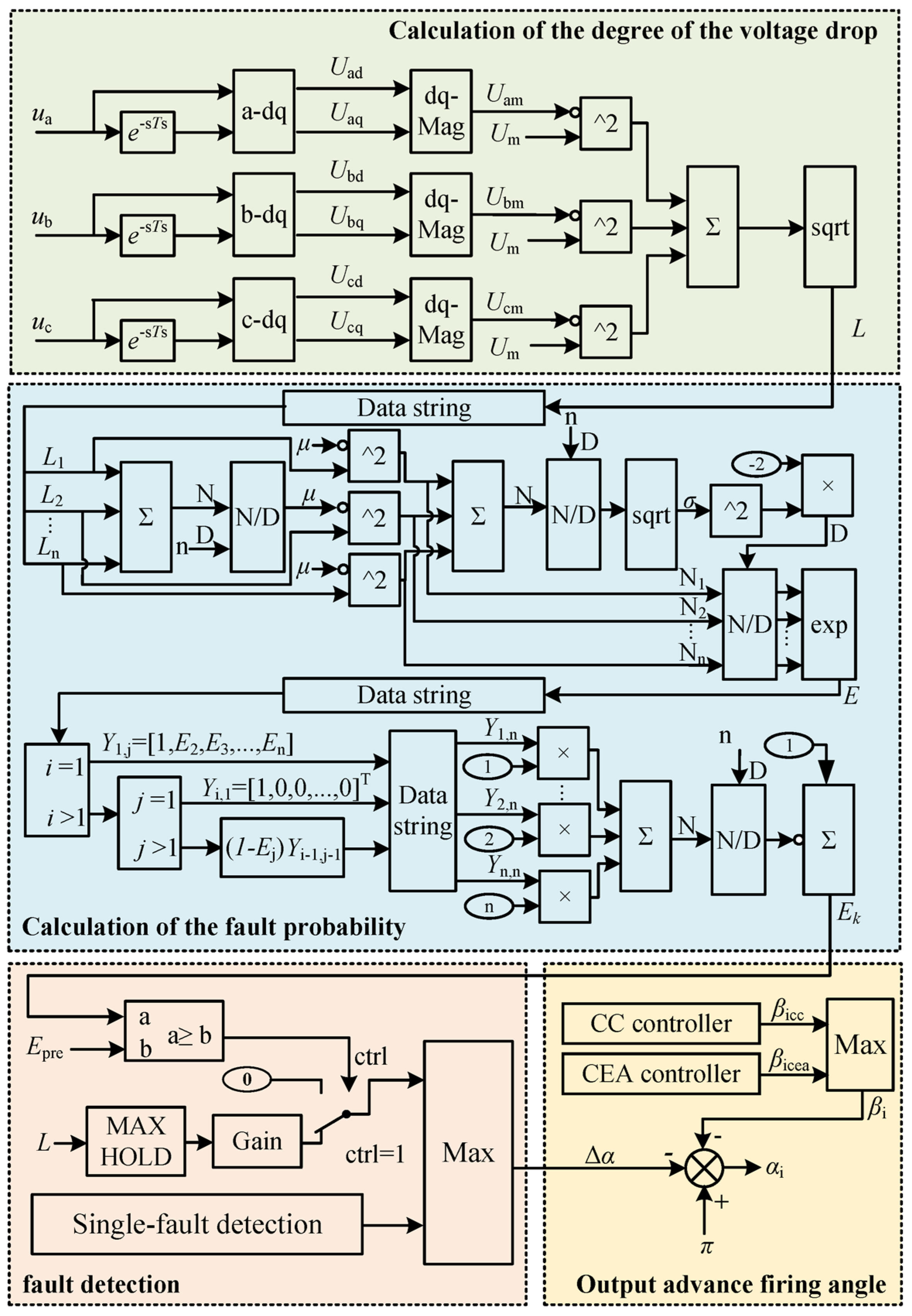
3.1. Calculation of the Degree of Voltage Drop
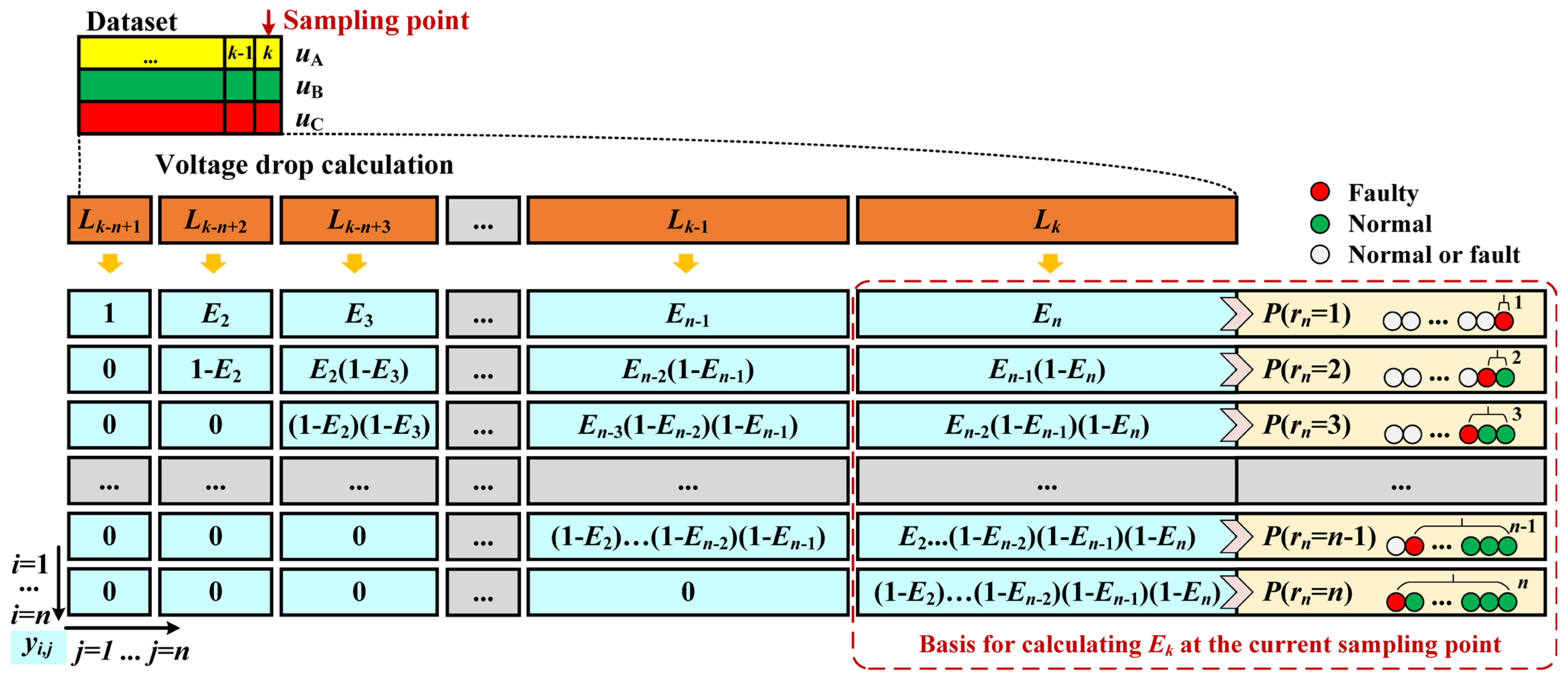
3.2. Fault Probability Detection Algorithm Based on Bayesian Theory
3.3. The Improved Prevention Strategy Based on Fault Probability Detection
4. Simulation Validation
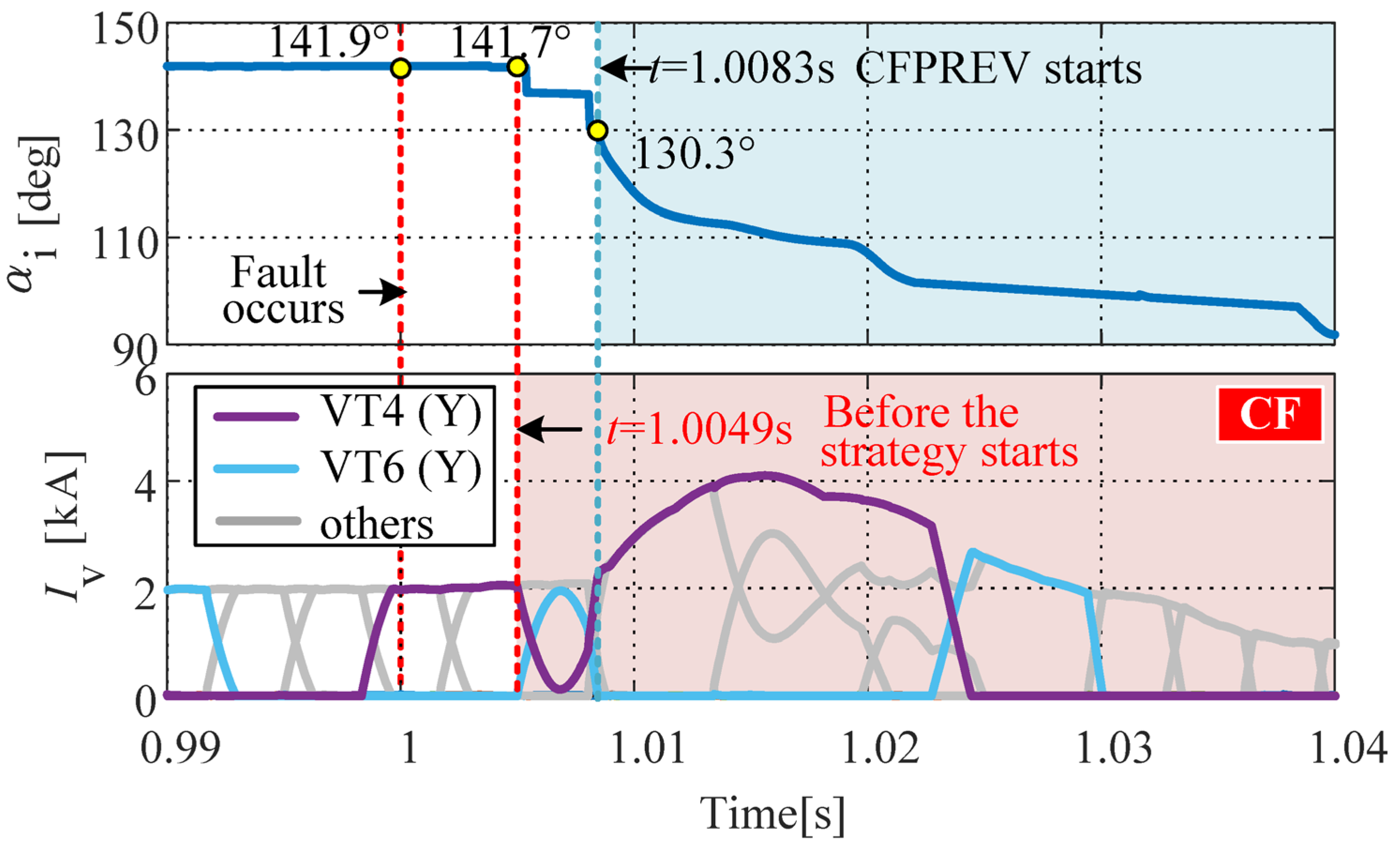
4.1. Validation of Fault Detection Based on Real Data
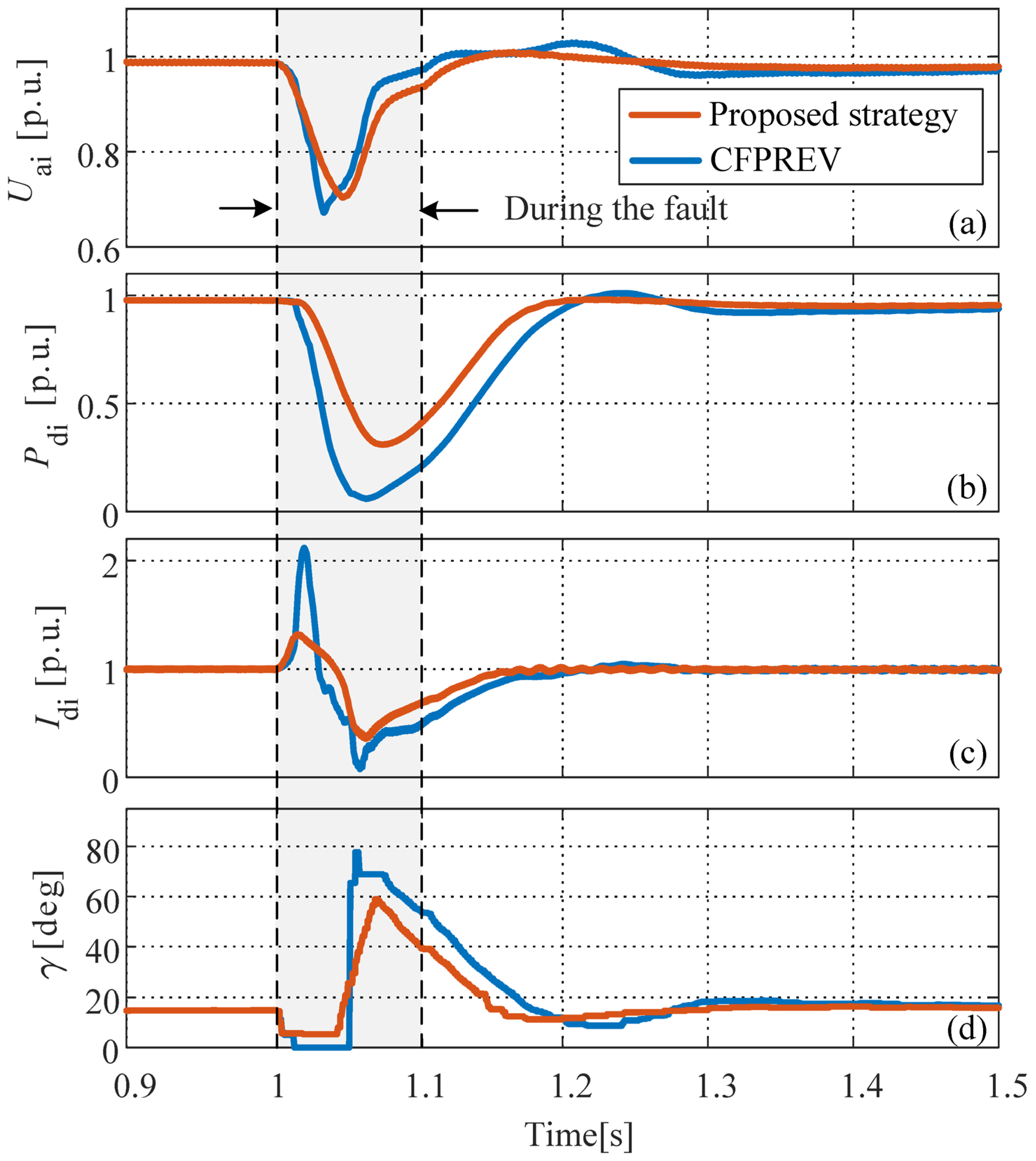
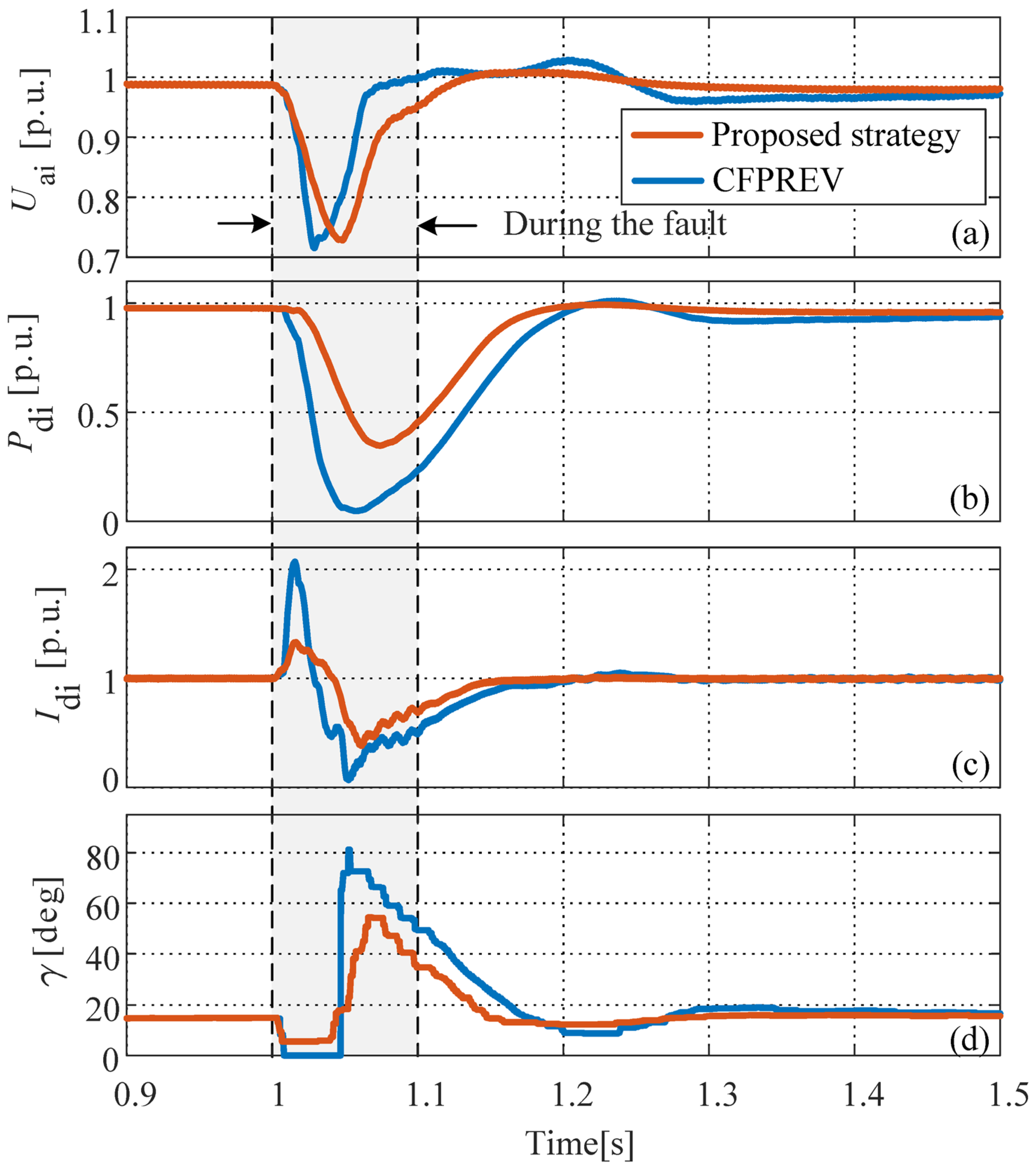
4.2. Analysis of CF Suppression under Typical Fault Scenarios
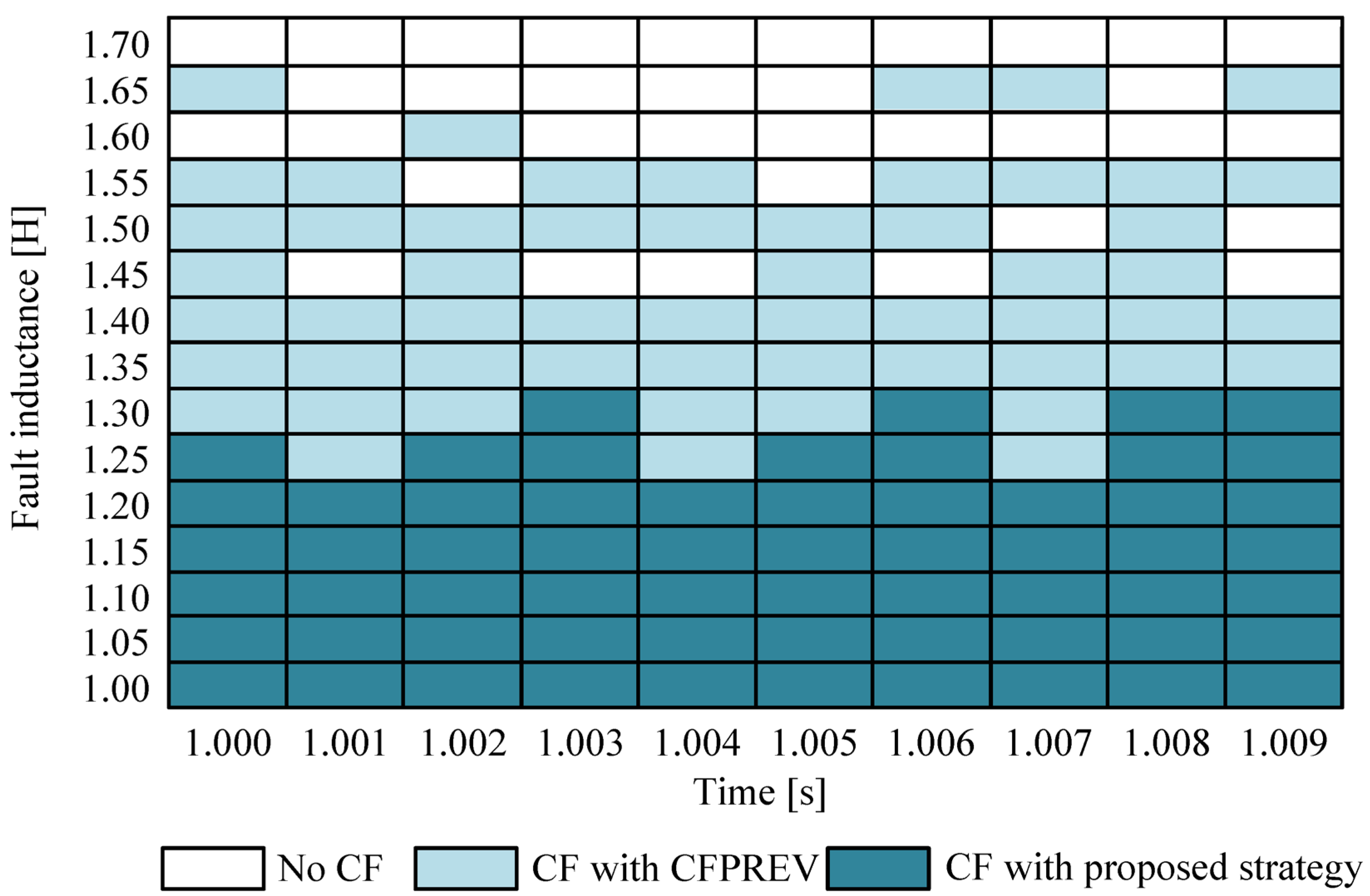
4.3. Statistical Analysis of CF Suppression Effect under Various Fault Conditions
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, D.; Gao, Y.; Sun, M. A General Self-Adaptive DC Current Control of LCC-HVDC for Eliminating Subsequent Commutation Failure. IEEE Trans. Power Deliv. 2023, 38, 2232–2235. [Google Scholar] [CrossRef]
- Guo, Y.; Tan, Z.; Li, X.; Wang, Y.; Liu, Z.; Cai, Z.; Chen, Z. A Hierarchical Identification Method of Commutation Failure Risk Areas in Multi-Infeed Lcc-Hvdc Systems. IEEE Trans. Power Syst. 2024, 39, 2093–2105. [Google Scholar] [CrossRef]
- Zhang, G.; Xiang, W.; Han, M.; Zuo, W.; Zhou, M.; Wen, J. DC Impedance Modeling of Push-Pull DC Auto-Transformer for MMC and LCC HVDC Interconnections. IEEE Trans. Power Deliv. 2023, 38, 2441–2453. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, X.; Xia, H.; Hong, L.; Yin, H.; Deng, L.; Liu, Y. Commutation Failure Mitigation Method Based on Imaginary Commutation Process. J. Mod. Power Syst. Clean Energy 2022, 10, 1413–1422. [Google Scholar] [CrossRef]
- Zhou, B.; Fang, J.; Ai, X.; Yang, C.; Yao, W.; Wen, J. Dynamic Var Reserve-Constrained Coordinated Scheduling of LCC-HVDC Receiving-End System Considering Contingencies and Wind Uncertainties. IEEE Trans. Sustain. Energy 2021, 12, 469–481. [Google Scholar] [CrossRef]
- Song, J.; Li, Y.; Zeng, L.; Zhang, Y. Review on Commutation Failure of HVDC Transmission System. Autom. Electr. Power Syst. 2020, 44, 2–13. [Google Scholar]
- Zhou, H.; Yao, W.; Ai, X.; Zhang, J.; Wen, J.; Li, C. Coordinated power control of electrochemical energystorage for mitigating subsequent commutation failures of HVDC. Int. J. Electr. Power Energy Syst. 2022, 134, 107455. [Google Scholar] [CrossRef]
- Liu, D.; Zou, C.; Li, X.; Lin, B.; Liu, J.; Jin, T. Suppression of continuous commutation failure in LCC-HVDC transmission based on improved virtual synchronous generator control for energy storage system. Int. J. Electr. Power Energy Syst. 2024, 159, 110018. [Google Scholar] [CrossRef]
- Xing, C.; Chen, J.; Xu, Z.; Xi, X.; He, X.; Chen, S. Research on battery energy storage STATCOM suppressing HVDC commutation failure. Front. Energy Res. 2022, 10, 865620. [Google Scholar] [CrossRef]
- Xu, C.; Yu, Z.; Zhao, B.; Chen, Z.; Wang, Z.; Ren, C.; Zeng, R. A novel hybrid line commutated converter based on IGCT to mitigate commutation failure for high-power HVDC application. IEEE Trans. Power Electron. 2021, 37, 4931–4936. [Google Scholar] [CrossRef]
- Deng, L.; Zhou, X.; Hong, L.; Yin, H.; Zhu, R. A damping-controllable-commutated converter for mitigating commutation failure of LCC-HVDC. IEEE Trans. Power Deliv. 2023, 38, 4371–4383. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, J.; Liu, Y.; Fu, C.; He, Q.; Wu, Q.; Wen, Z. An Improved Synchronous Firing Control on Suppressing LCC-HVDC Commutation Failures Caused by Single-Phase-Grounding Faults. IEEE Trans. Power Deliv. 2023, 38, 3875–3887. [Google Scholar] [CrossRef]
- Lu, J.; Yuan, X.; Zhang, M.; Hu, J. Supplementary Control for Mitigation of Successive Commutation Failures Considering the Influence of PLL Dynamics in LCC-HVDC Systems. CSEE J. Power Energy Syst. 2022, 8, 872–879. [Google Scholar]
- Tian, D.; Xiong, X. Corrections of Original CFPREV Control in LCC-HVDC Links and Analysis of Its Inherent Plateau Effect. CSEE J. Power Energy Syst. 2022, 8, 10–16. [Google Scholar]
- Zhang, L.; Dofnas, L. A Novel Method to Mitigate Commutation Failures in HVDC Systems. In Proceedings of the International Conference on Power System Technology, Kunming, China, 13–17 October 2002; Volume 1, pp. 51–56. [Google Scholar]
- Chen, S.; Li, X.; Yu, J.; Li, T.; Lu, P.; Yin, Y. A Method Based on the Sin-Cos Components Detection Mitigates Commutation Failure in HVDC. Proc.-Chin. Soc. Electr. Eng. 2005, 25, 1. [Google Scholar]
- Li, X.; Chen, S.; Pang, G.; Lei, X.; Liu, Y. Optimization of Commutation Failure Prevention and Automatic Recovery for East China Multi-Infeed High-Voltage Direct Current System. Autom. Electr. Power Syst. 2015, 39, 134–140. [Google Scholar]
- Chao, Z.; Zhou, J.; Li, H.; Wan, L.; Sun, H. Impact of Commutation Failure Prediction Control on Voltage Stability and Its Optimization Measures. Autom. Electr. Power Syst. 2016, 40, 179–183. [Google Scholar]
- Cheng, F.; Yao, L.; Wang, Z.; Liu, C.; Wang, Q.; Deng, J.; Lan, T. A Commutation Failure Mitigation Strategy Based on Virtual Phase Lock Loop Voltage. Proc. CSEE 2020, 40, 2756–2766. [Google Scholar]
- Wang, Z.; Fu, C.; Wang, J.; Li, Z.; Wang, X. Study on the Influence of Phase-locked Loop on Follow-up Commutation Failure of HVDC System. Proc. CSEE 2019, 39, 6836–6844. [Google Scholar]
- Wang, Z.; Wang, J.; Fu, C.; Li, Z. Individual Phase Control of High Voltage Direct Current Based on Single-phase Locked Loop. Autom. Electr. Power Syst. 2018, 42, 160–165. [Google Scholar]
- Gong, Y.; Wang, J.; Wang, Z.; Fu, Z. A Novel Phase-locked Loop for HVDC. Power Syst. Technol. 2019, 43, 4097–4105. [Google Scholar]
- Zhu, J.; Li, Y.; Duan, X. A Constant Extinction Area Based Control Strategy for Suppressing Commutation Failure in Hybrid Dual-Infeed HVDC System. Power Syst. Technol. 2018, 42, 3735–3743. [Google Scholar]
- Zhou, B.; Li, F.; Yin, C. A Novel Method to Predict and Prevent Commutation Failures in LCC-HVDC Systems. Int. J. Electr. Power Energy Syst. 2023, 144, 108399. [Google Scholar] [CrossRef]
- Yousaf, M.Z.; Liu, H.; Raza, A.; Mustafa, A. Deep Learning-Based Robust DC Fault Protection Scheme for Meshed HVDC Grids. CSEE J. Power Energy Syst. 2023, 11, 2423–2434. [Google Scholar]
- Yousaf, M.Z.; Khalid, S.; Tahir, M.F.; Tzes, A.; Raza, A. A novel dc fault protection scheme based on intelligent network for meshed dc grids. Int. J. Electr. Power Energy Syst. 2023, 8, 109423. [Google Scholar] [CrossRef]
- Yousaf, M.Z.; Mirsaeidi, S.; Khalid, S.; Raza, A.; Zhichu, C.; Rehman, W.U.; Badshah, F. Multisegmented Intelligent Solution for MT-HVDC Grid Protection. Electronics 2023, 12, 1766. [Google Scholar] [CrossRef]
- Yousaf, M.Z.; Tahir, M.F.; Raza, A.; Khan, M.A.; Badshah, F. Intelligent Sensors for dc Fault Location Scheme Based on Optimized Intelligent Architecture for HVdc Systems. Sensors 2022, 12, 9936. [Google Scholar] [CrossRef]
- Benasla, M.; Allaoui, T.; Brahami, M.; Boudali, A.; Chedni, Y. Study and Simulation of Hvdc System in Dynamic Condition. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; pp. 276–281. [Google Scholar]
- Liu, L.; Li, X.; Teng, Y.; Chen, K.; Tang, Y. An Improved Commutation Failure Prevention Control for Hybrid Cascaded UHVDC System. In Proceedings of the 2023 Panda Forum on Power and Energy (PandaFPE), Chengdu, China, 27–30 April 2023; pp. 55–59. [Google Scholar]
- Nguyen, D.T.; Duong, Q.B.; Zamaï, É.; Shahzad, M.K. Bayesian Network Model with Dynamic Structure Identification for Real Time Diagnosis. In Proceedings of the 2014 IEEE Emerging Technology and Factory Automation (ETFA), Barcelona, Spain, 16–19 September 2014; pp. 1–8. [Google Scholar]
- Liu, L.; Lin, S.; Sun, P.; Liao, K.; Li, X.; Deng, Y.; He, Z. A Calculation Method of Pseudo Extinction Angle for Commutation Failure Mitigation in HVDC. IEEE Trans. Power Deliv. 2019, 34, 777–779. [Google Scholar] [CrossRef]
- Zhou, B.; Li, F.; Song, X.; Yin, C. Commutation Failure Prediction and Control System Optimization Based on DC Current Variation. Power Syst. Technol. 2019, 43, 3497–3504. [Google Scholar]
- Zhou, H.; Yao, W.; Li, J. Commutation Failure Prevention Strategy of HVDC Based on Current and Voltage Prediction. Proc. CSEE 2022, 42, 5948–5959+6169. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nomenclature | |
|---|---|
| Idr, Idi | DC current in the rectifier and inverter, respectively |
| αr, αi | Firing angle order of the rectifier and inverter, respectively |
| Udi | Rectifier DC voltage |
| γ | Rectifier extinction angle |
| Idord, Idrord | Set and actual DC current order, respectively |
| βrcc | Output from the rectifier CC controller |
| βicc | Output from the inverter CC controller |
| βrcea | Output from the inverter CEA controller |
| βi | Leading firing angle order in the inverter |
| Δγiord | Extinction angle compensation |
| Δα | Additional firing angle lead order from the CFPREV control |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Zou, Y.; Liu, L.; Li, X.; Teng, Y.; Gao, Z. An Improved Prevention Strategy Based on Fault Probability Detection for Commutation Failure in Line-Commutated Converter-Based High-Voltage Direct Current Transmission Systems. Electronics 2024, 13, 3804. https://doi.org/10.3390/electronics13193804
Xu Y, Zou Y, Liu L, Li X, Teng Y, Gao Z. An Improved Prevention Strategy Based on Fault Probability Detection for Commutation Failure in Line-Commutated Converter-Based High-Voltage Direct Current Transmission Systems. Electronics. 2024; 13(19):3804. https://doi.org/10.3390/electronics13193804
Chicago/Turabian StyleXu, Ying, Yi Zou, Lei Liu, Xiaopeng Li, Yufei Teng, and Zijian Gao. 2024. "An Improved Prevention Strategy Based on Fault Probability Detection for Commutation Failure in Line-Commutated Converter-Based High-Voltage Direct Current Transmission Systems" Electronics 13, no. 19: 3804. https://doi.org/10.3390/electronics13193804
APA StyleXu, Y., Zou, Y., Liu, L., Li, X., Teng, Y., & Gao, Z. (2024). An Improved Prevention Strategy Based on Fault Probability Detection for Commutation Failure in Line-Commutated Converter-Based High-Voltage Direct Current Transmission Systems. Electronics, 13(19), 3804. https://doi.org/10.3390/electronics13193804