
Stability of Local Trajectory Planning for Level-2+ Semi-Autonomous Driving without Absolute Localization



Abstract
1. Introduction
1.1. Background
1.2. Related Work
1.3. Present Contribution
2. Methodology
2.1. Planning Framework
- Find a mapping with , , such that , .
2.2. Validation Pipeline
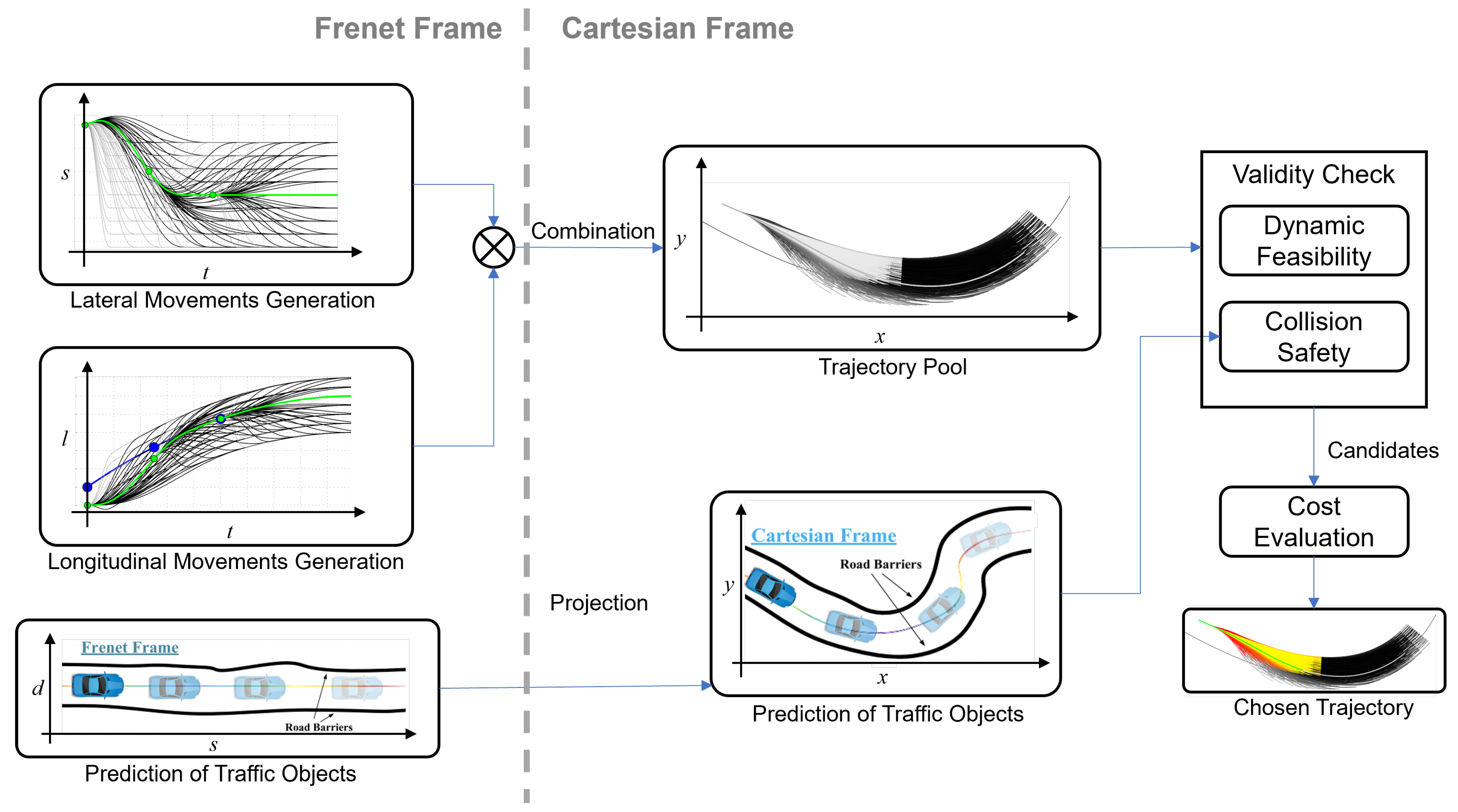
- Generation of Candidate Trajectories in the Frenet Frame: Quintic polynomials are generated for both the lateral and longitudinal motion in the Frenet coordinate system. The Frenet frame represents the vehicle’s motion along the curvilinear road geometry, where the lateral and longitudinal dimensions are decoupled. These polynomials capture various driving behaviors, such as maintaining velocity, following, merging, or stopping. The polynomials are then combined to form a set of candidate trajectories, which are transformed into the Cartesian frame for further analysis.
- Object Representation and Prediction: Traffic objects, such as other vehicles, are also represented in the Frenet frame per lane. This simplifies the prediction of their future movements, as road geometry is straightened in this frame. For instance, models like the Intelligent Driver Model (IDM) can be applied to predict object motion, which is then converted back into the Cartesian frame.
- Feasibility and Collision Checks: The generated candidate trajectories are subjected to the two following checks: (1) dynamic feasibility, ensuring that the trajectories are physically realizable by the ego vehicle, and (2) collision checks in the Cartesian frame, where box-based safety checks are performed, considering the shapes and predicted positions of both the ego vehicle and surrounding objects.
- Cost Evaluation and Optimal Trajectory Selection: The remaining feasible trajectories are evaluated using a cost function. This function accounts for factors such as collision risk, efficiency, driving comfort, and deviation from the centerline. The trajectory with the lowest cost is selected as the final, optimal path for the vehicle to follow.
3. Stability Analysis
3.1. Problem Description
3.2. Stability Analysis
- For every , there exists a , such that, if , then for every .
- , such that is bounded .
4. Results and Discussion
4.1. Moving Traffic Scene
4.2. Stop Scene
4.3. Stability Limits at Sensor Offset Errors
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dave, P. Dashcam Footage Shows Driverless Cars Clogging San Francisco. 2023. Available online: https://www.wired.com/story/dashcam-footage-shows-driverless-cars-cruise-waymo-clogging-san-francisco/ (accessed on 12 April 2023).
- Metz, C. Self-Driving Car Services Want to Expand in San Francisco Despite Recent Hiccups. 2023. Available online: https://www.nytimes.com/2023/02/01/technology/self-driving-taxi-san-francisco.html (accessed on 12 April 2023).
- Korosec, K. Uber Spent $457 Million on Self-Driving and Flying Car R&D Last Year. 2019. Available online: https://techcrunch.com/2019/04/11/uber-spent-457-million-on-self-driving-and-flying-car-rd-last-year/ (accessed on 12 April 2023).
- Korosec, K. Ford, VW-Backed Argo AI Is Shutting Down. 2022. Available online: https://techcrunch.com/2022/10/26/ford-vw-backed-argo-ai-is-shutting-down/ (accessed on 12 April 2023).
- Hirsch, J. Financial Challenges Shutter Self-Driving Truck Company Embark Technology. 2023. Available online: https://www.autonews.com/mobility-report/embark-technology-shuts-down (accessed on 12 April 2023).
- Thorbecke, C. Alphabet’s Self-Driving Car Unit Has Cut 8% of Its Staff This Year. 2023. Available online: https://www.cnn.com/2023/03/01/tech/waymo-layoffs/index.html (accessed on 12 April 2023).
- Neill, C. TuSimple to Lay Off 25% of Workforce. 2022. Available online: https://www.reuters.com/business/autostransportation/tusimple-lay-off-25-workforce-2022-12-21/ (accessed on 12 April 2023).
- Kolodny, L. Tesla Reports Record Revenue and Beats on Earnings. 2023. Available online: https://www.cnbc.com/2023/01/25/tesla-tsla-earnings-q4-2022.html (accessed on 12 April 2023).
- O’Hare, B. Tesla Reveals How Many Buyers Have Bought FSD. 2023. Available online: https://insideevs.com/news/629094/tesla-how-many-buy-fsd/ (accessed on 12 April 2023).
- Gassée, J.L. Tesla vs. Waymo. 2019. Available online: https://mondaynote.com/tesla-vs-waymo-762cc6a8771b (accessed on 13 April 2023).
- International, S. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE Int. 2018, 4970, 1–5. [Google Scholar]
- China L2 and L2+ Autonomous Passenger Car Research Report, 2022; Technical Report 5697800; Research in China: Beijing, China, 2022.
- Rosenthal, E. When a Tesla on Autopilot Kills Someone, Who Is Responsible? 2022. Available online: https://www.nyu.edu/about/news-publications/news/2022/march/when-a-tesla-on-autopilot-kills-someone--who-is-responsible--.html (accessed on 13 April 2023).
- Ji, X. Why Are L4 Autonomous Driving Firms Delivering L2 Solutions? 2022. Available online: https://equalocean.com/analysis/2022062218310 (accessed on 13 April 2023).
- Schütz, A.; Sánchez-Morales, D.E.; Pany, T. Precise positioning through a loosely-coupled sensor fusion of GNSS-RTK, INS and LiDAR for autonomous driving. In Proceedings of the 2020 IEEE/ION position, location and navigation symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 219–225. [Google Scholar]
- Yan, Z.; Sun, L.; Krajník, T.; Ruichek, Y. EU long-term dataset with multiple sensors for autonomous driving. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 10697–10704. [Google Scholar]
- Nagai, K.; Spenko, M.; Henderson, R.; Pervan, B. Evaluating INS/GNSS availability for self-driving cars in urban environments. In Proceedings of the 2021 International Technical Meeting of The Institute of Navigation, Online, 25–28 January 2021; pp. 243–253. [Google Scholar]
- Chalvatzaras, A.; Pratikakis, I.; Amanatiadis, A.A. A survey on map-based localization techniques for autonomous vehicles. IEEE Trans. Intell. Veh. 2022, 8, 1574–1596. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-PapersOnLine 2017, 50, 276–281. [Google Scholar] [CrossRef]
- Stachniss, C.; Leonard, J.J.; Thrun, S. Simultaneous localization and mapping. In Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016; pp. 1153–1176. [Google Scholar]
- Kummerle, R.; Hahnel, D.; Dolgov, D.; Thrun, S.; Burgard, W. Autonomous driving in a multi-level parking structure. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3395–3400. [Google Scholar]
- Qin, T.; Chen, T.; Chen, Y.; Su, Q. Avp-slam: Semantic visual mapping and localization for autonomous vehicles in the parking lot. In Proceedings of the 2020 IEEE/RSJ International Conference on intelligent robots and systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5939–5945. [Google Scholar]
- Singandhupe, A.; La, H.M. A review of slam techniques and security in autonomous driving. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 602–607. [Google Scholar]
- Zheng, S.; Wang, J.; Rizos, C.; Ding, W.; El-Mowafy, A. Simultaneous localization and mapping (slam) for autonomous driving: Concept and analysis. Remote Sens. 2023, 15, 1156. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S. Learning wheel odometry and IMU errors for localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 291–297. [Google Scholar]
- Aqel, M.O.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef] [PubMed]
- Zhu, S.; Gelbal, S.Y.; Aksun-Guvenc, B. Online quintic path planning of minimum curvature variation with application in collision avoidance. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 669–676. [Google Scholar]
- Guvenc, L.; Aksun-Guvenc, B.; Zhu, S.; Gelbal, S.Y. Autonomous Road Vehicle Path Planning and Tracking Control; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Ji, Y.; Ni, L.; Zhao, C.; Lei, C.; Du, Y.; Wang, W. TriPField: A 3D potential field model and its applications to local path planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3541–3554. [Google Scholar] [CrossRef]
- Ma, L.; Xue, J.; Kawabata, K.; Zhu, J.; Ma, C.; Zheng, N. Efficient Sampling-Based Motion Planning for On-Road Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1961–1976. [Google Scholar] [CrossRef]
- Zhu, S.; Aksun-Guvenc, B. Trajectory planning of autonomous vehicles based on parameterized control optimization in dynamic on-road environments. J. Intell. Robot. Syst. 2020, 100, 1055–1067. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, W.; Tomizuka, M. Constrained iterative lqr for on-road autonomous driving motion planning. In Proceedings of the 2017 IEEE 20th International conference on intelligent transportation systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Tsukamoto, H.; Chung, S.J. Learning-based Robust Motion Planning With Guaranteed Stability: A Contraction Theory Approach. IEEE Robot. Autom. Lett. 2021, 6, 6164–6171. [Google Scholar] [CrossRef]
- Englot, B.; Johannsson, H.; Hover, F. Perception, stability analysis, and motion planning for autonomous ship hull inspection. In Proceedings of the International Symposium on Unmanned Untethered Submersible Technology (UUST), Durham, NH, USA, 23–26 August 2009. [Google Scholar]
- Gu, T.; Atwood, J.; Dong, C.; Dolan, J.M.; Lee, J.W. Tunable and stable real-time trajectory planning for urban autonomous driving. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 Septembe–2 October 2015; pp. 250–256. [Google Scholar] [CrossRef]
- Kant, K.; Zucker, S.W. Toward efficient trajectory planning: The path-velocity decomposition. Int. J. Robot. Res. 1986, 5, 72–89. [Google Scholar] [CrossRef]
- Werling, M.; Kammel, S.; Ziegler, J.; Gröll, L. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds. Int. J. Robot. Res. 2012, 31, 346–359. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurements | Error Distribution |
|---|---|
| Speed v | ∼ m/s |
| Yaw rate | ∼ deg/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Wang, J.; Yang, Y.; Aksun-Guvenc, B. Stability of Local Trajectory Planning for Level-2+ Semi-Autonomous Driving without Absolute Localization. Electronics 2024, 13, 3808. https://doi.org/10.3390/electronics13193808
Zhu S, Wang J, Yang Y, Aksun-Guvenc B. Stability of Local Trajectory Planning for Level-2+ Semi-Autonomous Driving without Absolute Localization. Electronics. 2024; 13(19):3808. https://doi.org/10.3390/electronics13193808
Chicago/Turabian StyleZhu, Sheng, Jiawei Wang, Yu Yang, and Bilin Aksun-Guvenc. 2024. "Stability of Local Trajectory Planning for Level-2+ Semi-Autonomous Driving without Absolute Localization" Electronics 13, no. 19: 3808. https://doi.org/10.3390/electronics13193808
APA StyleZhu, S., Wang, J., Yang, Y., & Aksun-Guvenc, B. (2024). Stability of Local Trajectory Planning for Level-2+ Semi-Autonomous Driving without Absolute Localization. Electronics, 13(19), 3808. https://doi.org/10.3390/electronics13193808