
High-Precision Forward Modeling of Controlled Source Electromagnetic Method Based on Weighted Average Extrapolation Method


 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Layered Medium Response Expression
2.1.1. Horizontal Dipole Sources
2.1.2. Vertical Electric Dipole Source
2.1.3. Magnetic Dipole Source
2.2. Hankel Transform Calculation Based on Weighted Average Extrapolation
2.2.1. Hankel Transform
2.2.2. WA Extrapolation
3. Numerical Tests
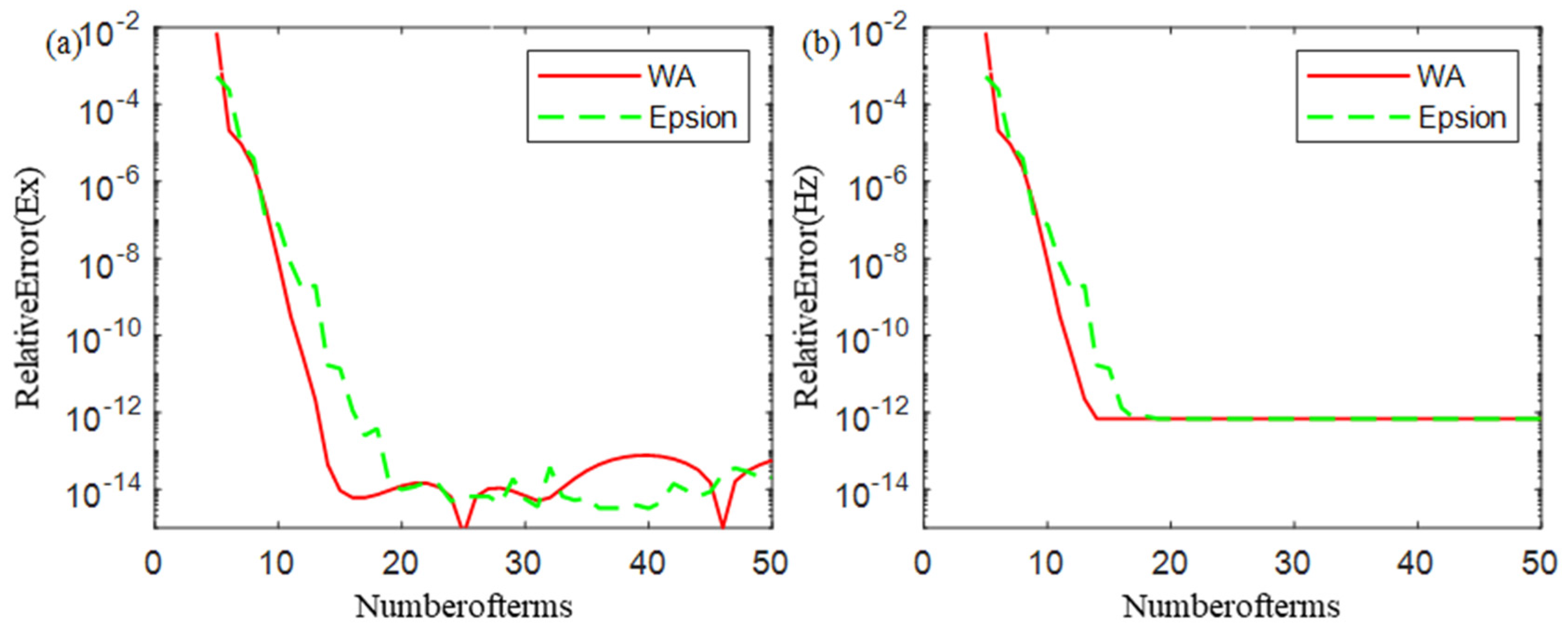
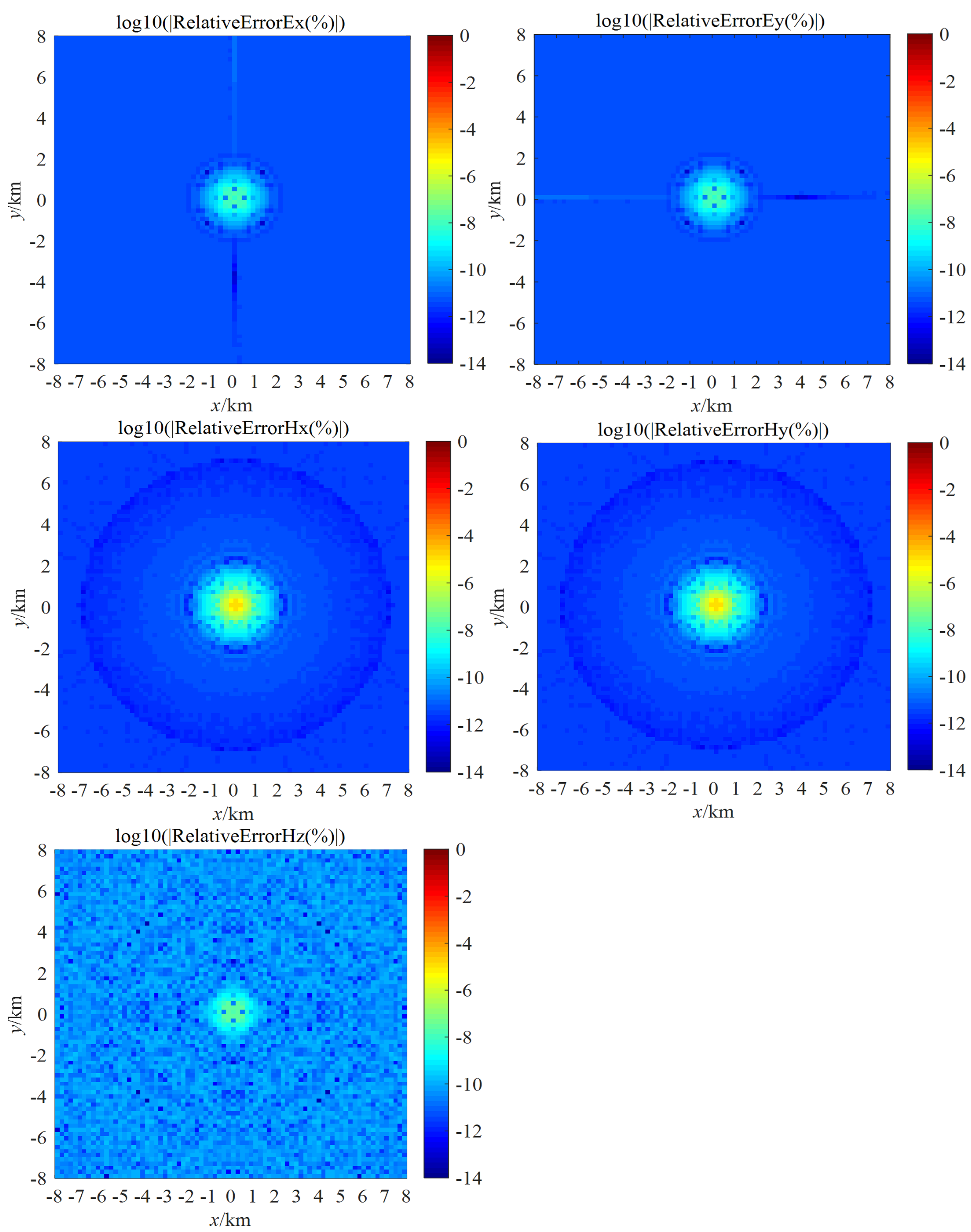
3.1. Accuracy Verification
3.1.1. Horizontal Dipole Source
3.1.2. Vertical Magnetic Dipole Source
3.2. Algorithmic Applications
3.2.1. Sensitivity Calculation
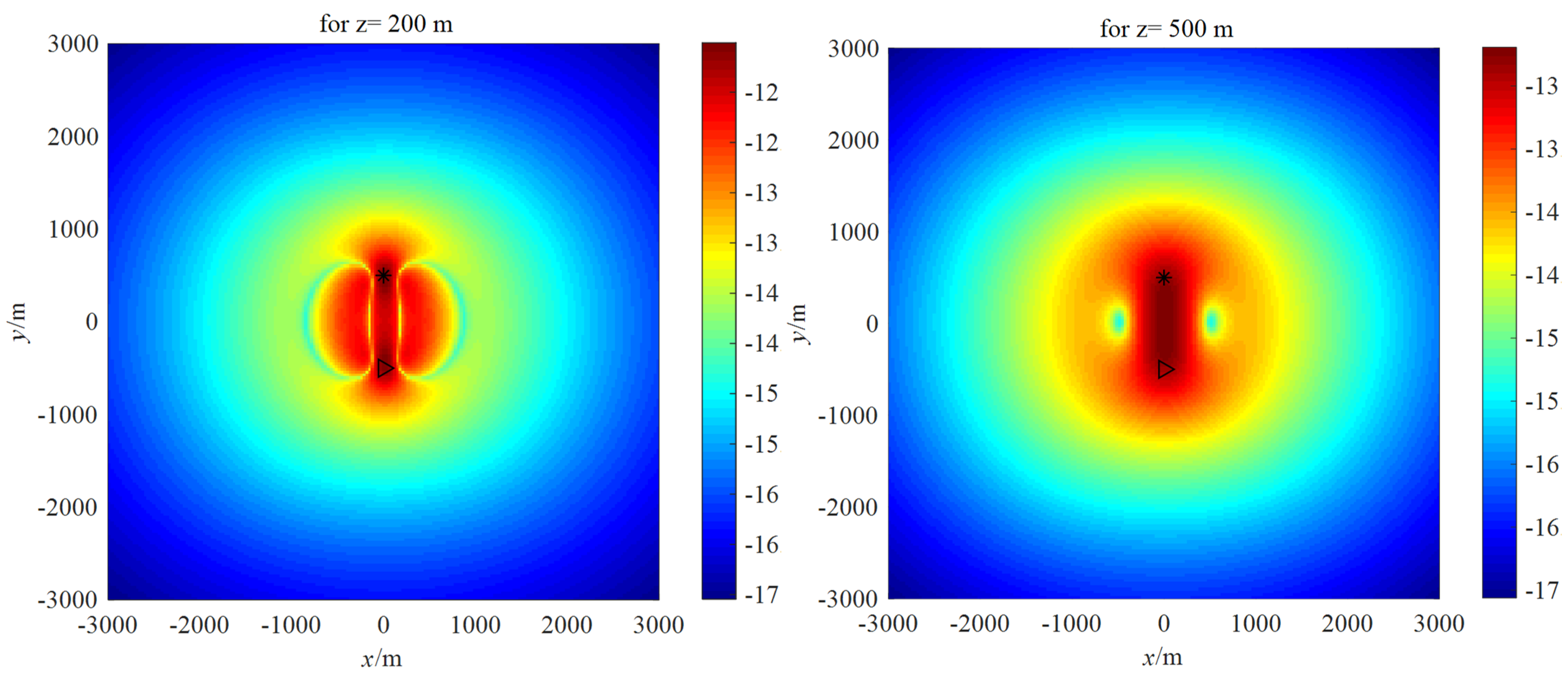
3.2.2. Energy Flow Density Calculation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kong, F. Hankel transform filters for dipole antenna radiation in a conductive medium. Geophys. Prospect. 2007, 55, 83–89. [Google Scholar] [CrossRef]
- Løseth, L.; Ursin, B. Electromagnetic fields in planarly layered anisotropic media. Geophys. J. Int. 2007, 170, 44–80. [Google Scholar] [CrossRef]
- Hunziker, J.; Thorbecke, J.; Slob, E. The electromagnetic response in a layered vertical transverse isotropic medium: A new look at an old problem. Geophysics 2015, 80, F1–F18. [Google Scholar] [CrossRef]
- Chave, A.D. Numerical integration of related Hankel transforms by quadrature and continued fraction expansion. Geophysics 1983, 48, 1671–1686. [Google Scholar] [CrossRef]
- Ward, S.H.; Hohmann, G.W. Electromagnetic theory for geophysical applications. In Electromagnetic Methods in Applied Geophysics: Volume 1, Theory; Society of Exploration Geophysicists: Houston, TX, USA, 1988; pp. 130–311. [Google Scholar]
- Kaufman, A.A.; Keller, G.V. Frequency and Transient Soundings; King, C.-Y., Scarpa, R., Eds.; Elsevier: Amsterdam, The Netherlands, 1983; p. 207. [Google Scholar]
- Key, K. 1D inversion of multicomponent, multifrequency marine CSEM data: Methodology and synthetic studies for resolving thin resistive layers. Geophysics 2009, 74, F9–F20. [Google Scholar] [CrossRef]
- Liu, R.; Liu, J.; Wang, J.; Wang, J.; Liu, Z.; Guo, R. 1D electromagnetic response modeling with arbitrary source-receiver geometry based on vector potential and its implementation in MATLAB. Geophysics 2020, 85, F27–F38. [Google Scholar] [CrossRef]
- Mosig, J. The weighted averages algorithm revisited. IEEE Trans. Antennas Propag. 2012, 60, 2011–2018. [Google Scholar] [CrossRef]
- Ghosh, D. Inverse filter coefficients for the computation of apparent resistivity standard curves for a horizontally stratified earth. Geophys. Prospect. 1971, 19, 769–775. [Google Scholar] [CrossRef]
- Key, K. Is the fast Hankel transform faster than quadrature? Geophysics 2012, 77, F21–F30. [Google Scholar] [CrossRef]
- Weniger, E.J. Nonlinear sequence transformations for the acceleration of convergence and the summation of divergent series. Comput. Phys. Rep. 1989, 10, 189–371. [Google Scholar] [CrossRef]
- Lucas, S.; Stone, H. Evaluating infinite integrals involving Bessel functions of arbitrary order. J. Comput. Appl. Math. 1995, 64, 217–231. [Google Scholar] [CrossRef]
- Michalski, K.A. Extrapolation methods for Sommerfeld integral tails. IEEE Trans. Antennas Propag. 1998, 46, 1405–1418. [Google Scholar] [CrossRef]
- Mosig, J.R.; Michalski, K.A. Sommerfeld integrals and their relation to the development of planar microwave devices. IEEE J. Microw. 2021, 1, 470–480. [Google Scholar] [CrossRef]
- Golubović, R.; Polimeridis, A.G.; Mosig, J.R. The weighted averages method for semi-infinite range integrals involving products of Bessel functions. IEEE Trans. Antennas Propag. 2012, 61, 5589–5596. [Google Scholar] [CrossRef]
- Lovat, G.; Celozzi, S. Lucas decomposition and extrapolation methods for the evaluation of infinite integrals involving the product of three Bessel functions of arbitrary order. J. Comput. Appl. Math. 2025, 453, 116141. [Google Scholar] [CrossRef]
- Kien, P.N.; Lee, S.M. 1DCSEMQWE: 1D Controlled Source Electromagnetic Method in Geophysics Using Quadrature with Extrapolation. SoftwareX 2022, 19, 101128. [Google Scholar] [CrossRef]
- Michalski, K.; Mosig, J. The Sommerfeld half-space problem revisited: From radio frequencies and Zenneck waves to visible light and Fano modes. J. Electromagn. Waves Appl. 2016, 30, 1–42. [Google Scholar] [CrossRef]
- Wang, F. Isotropic and Anisotropic Three-dimensional Inversion of Frequency-Domain Controlled-Source Electromagnetic Data Using Finite Element Techniques. Doctoral Dissertation, Fakultät Für Geowissenschaften, Geotechnik und Bergbau der Technischen Universität Bergakademie Freiberg, Saxony, Germany, 2016. [Google Scholar]
- Abdalla, M. On Hankel transforms of generalized Bessel matrix polynomials. AIMS Math. 2021, 6, 6122–6139. [Google Scholar] [CrossRef]
- Werthmüller, D.; Key, K.; Slob, E.C. A tool for designing digital filters for the Hankel and Fourier transforms in potential, diffusive, and wavefield modeling. Geophysics 2019, 84, F47–F56. [Google Scholar] [CrossRef]
- Thukral, R. A family of the functional epsilon algorithms for accelerating convergence. Rocky Mt. J. Math. 2008, 38, 291–307. [Google Scholar] [CrossRef]
- Brezinski, C.; Redivo-Zaglia, M.; Salam, A. On the kernel of vector ε-algorithm and related topics. Numer. Algorithms 2023, 92, 207–221. [Google Scholar] [CrossRef]
- Nagid, N.; Belhadj, H. New Approach for Accelerating Nonlinear Schwarz Iterations. Bol. Soc. Parana. Matemática 2020, 38, 51–69. [Google Scholar] [CrossRef]
- Michalski, K.A.; Mosig, J.R. Efficient computation of Sommerfeld integral tails–methods and algorithms. J. Electromagn. Waves Appl. 2016, 30, 281–317. [Google Scholar] [CrossRef]
- Hanssens, D.; Delefortrie, S.; Pue, J.D.; Meirvenne, M.C.; Smedt, P.D. Frequency-Domain Electromagnetic Forward and Sensitivity Modeling: Practical Aspects of Modeling a Magnetic Dipole in a Multilayered Half-Space. IEEE Geosci. Remote Sens. Mag. 2019, 7, 74–85. [Google Scholar] [CrossRef]
- Rincon-Tabares, J.-S.; Velasquez-Gonzalez, J.C.; Ramirez-Tamayo, D.; Montoya, A.; Millwater, H.; Restrepo, D. Sensitivity Analysis for Transient Thermal Problems Using the Complex-Variable Finite Element Method. Appl. Sci. 2022, 12, 2738. [Google Scholar] [CrossRef]
- Uhm, J.; Oh, J.W.; Min, D.J.; Heo, J. Analysis of sensitivity patterns for characteristics of magnetotelluric (MT) response functions in inversion. Geophys. J. Int. 2023, 233, 1746–1771. [Google Scholar] [CrossRef]
- Liu, T.T.; Bohlen, T. Time-domain poroelastic full-waveform inversion of shallow seismic data: Methodology and sensitivity analysis. Geophys. J. Int. 2023, 232, 1803–1820. [Google Scholar] [CrossRef]
- McGillivray, P.; Oldenburg, D.; Ellis, R.; Habashy, T. Calculation of sensitivities for the frequency-domain electromagnetic problem. Geophys. J. Int. 1994, 116, 1–4. [Google Scholar] [CrossRef]
- Chave, A.D. On the electromagnetic fields produced by marine frequency domain controlled sources. Geophys. J. Int. 2009, 179, 1429–1457. [Google Scholar] [CrossRef]
- Weidelt, P. Guided waves in marine CSEM. Geophys. J. Int. 2007, 171, 153–176. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Tang, J.; Huang, X.; Yang, M.; Sun, Y.; Xiao, X. High-Precision Forward Modeling of Controlled Source Electromagnetic Method Based on Weighted Average Extrapolation Method. Electronics 2024, 13, 3827. https://doi.org/10.3390/electronics13193827
Yang Z, Tang J, Huang X, Yang M, Sun Y, Xiao X. High-Precision Forward Modeling of Controlled Source Electromagnetic Method Based on Weighted Average Extrapolation Method. Electronics. 2024; 13(19):3827. https://doi.org/10.3390/electronics13193827
Chicago/Turabian StyleYang, Zhi, Jingtian Tang, Xiangyu Huang, Minsheng Yang, Yishu Sun, and Xiao Xiao. 2024. "High-Precision Forward Modeling of Controlled Source Electromagnetic Method Based on Weighted Average Extrapolation Method" Electronics 13, no. 19: 3827. https://doi.org/10.3390/electronics13193827