
The Validation and Implementation of the Second-Order Adaptive Fuzzy Logic Controller of a Double-Fed Induction Generator in an Oscillating Water Column
 , and
, and
Abstract
:1. Introduction
- Investigating the robustness of using SO-AFLCs, which are used in rotor-side converters and grid-side converters.
- Validating the OWCPP performance of SO-AFLCs and comparing it to that of the SGHS-PID methodology and a AFLC.
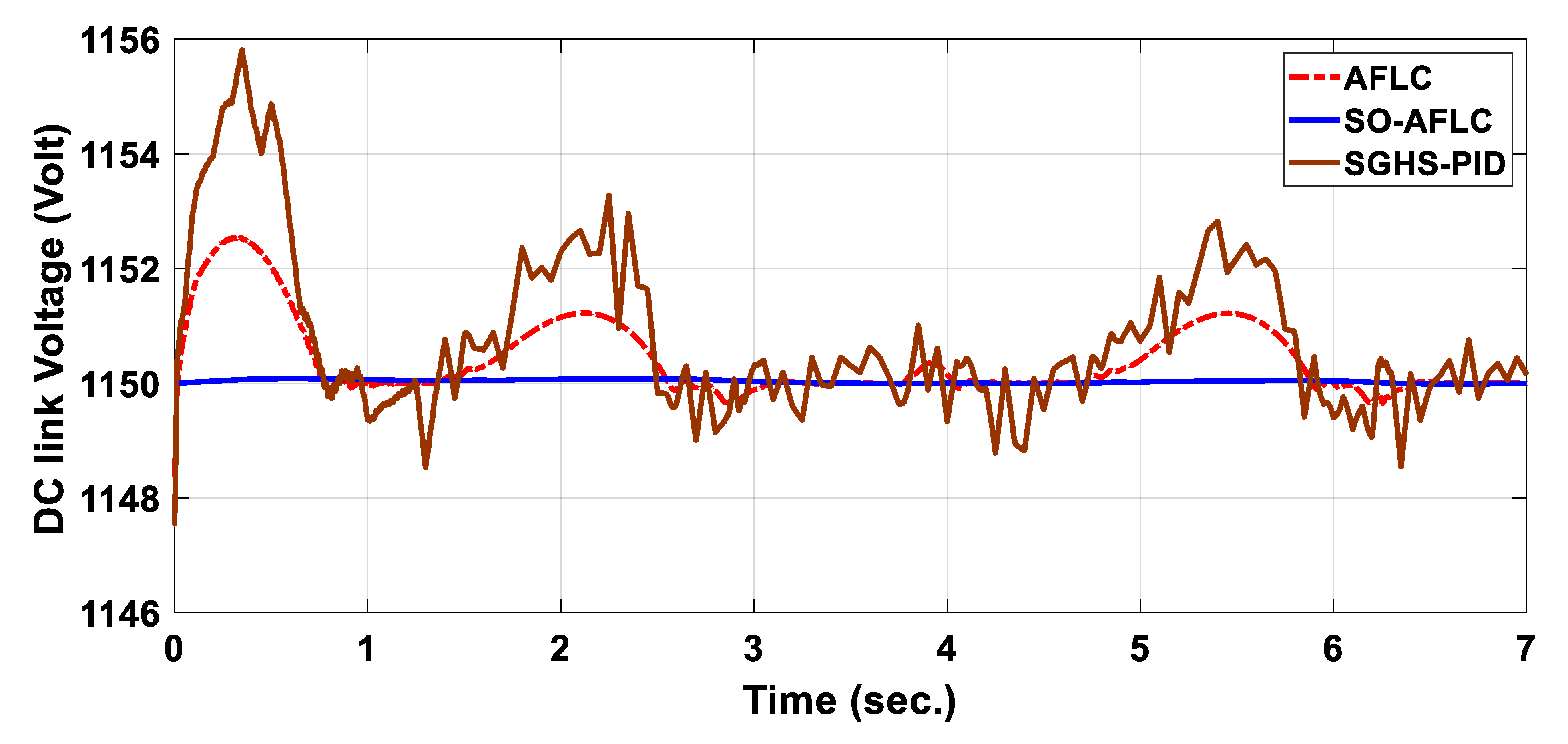
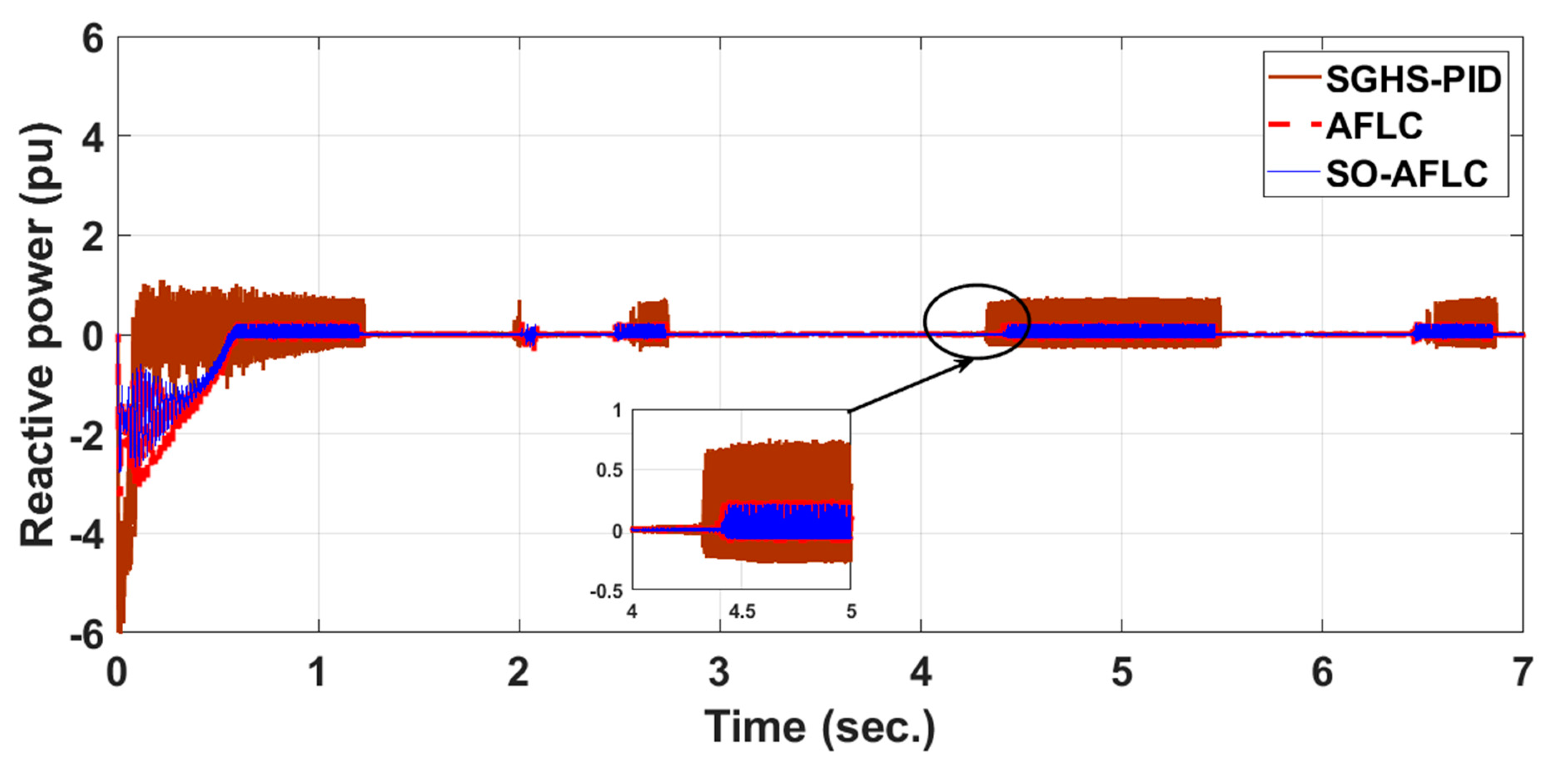
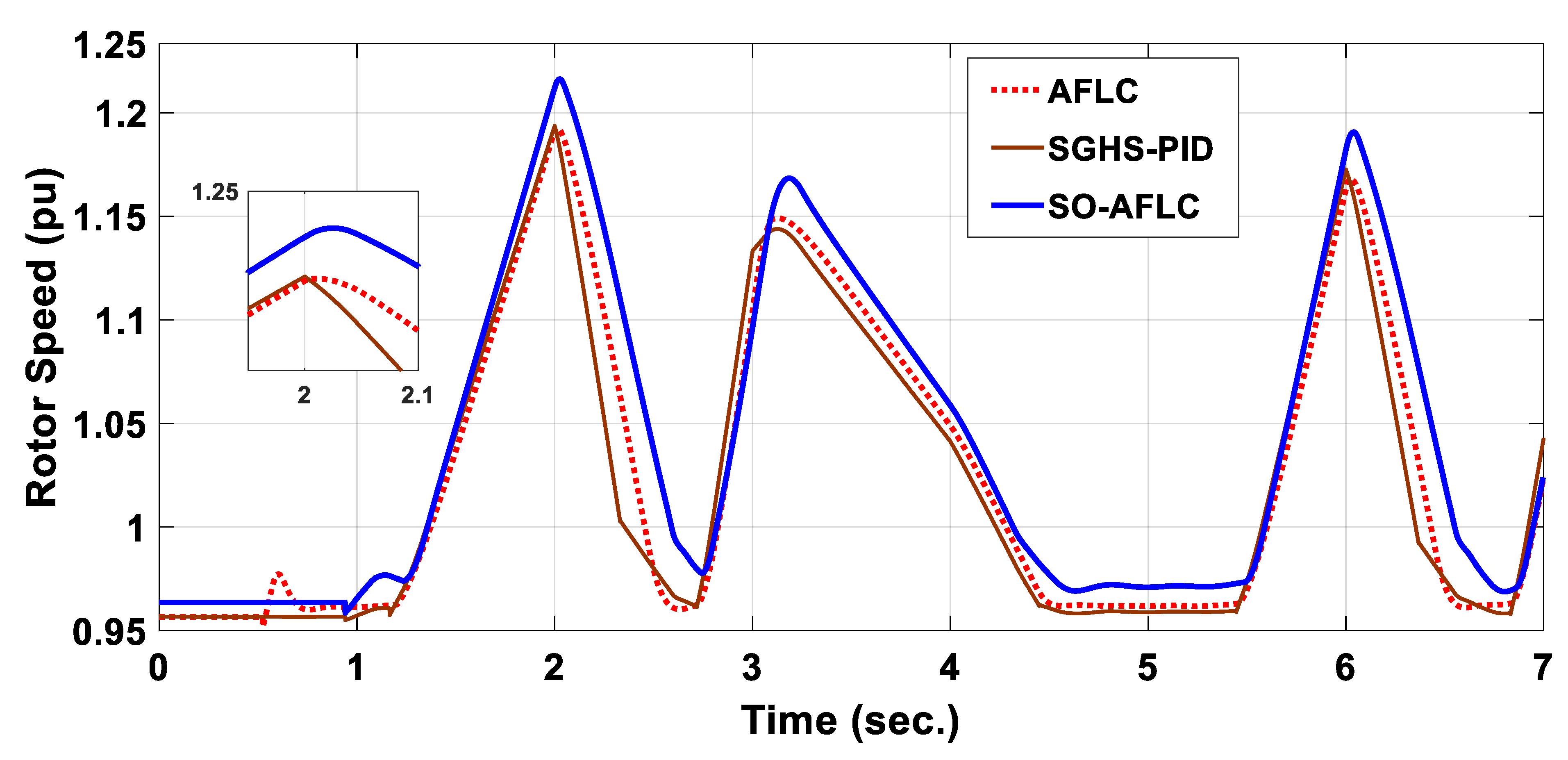
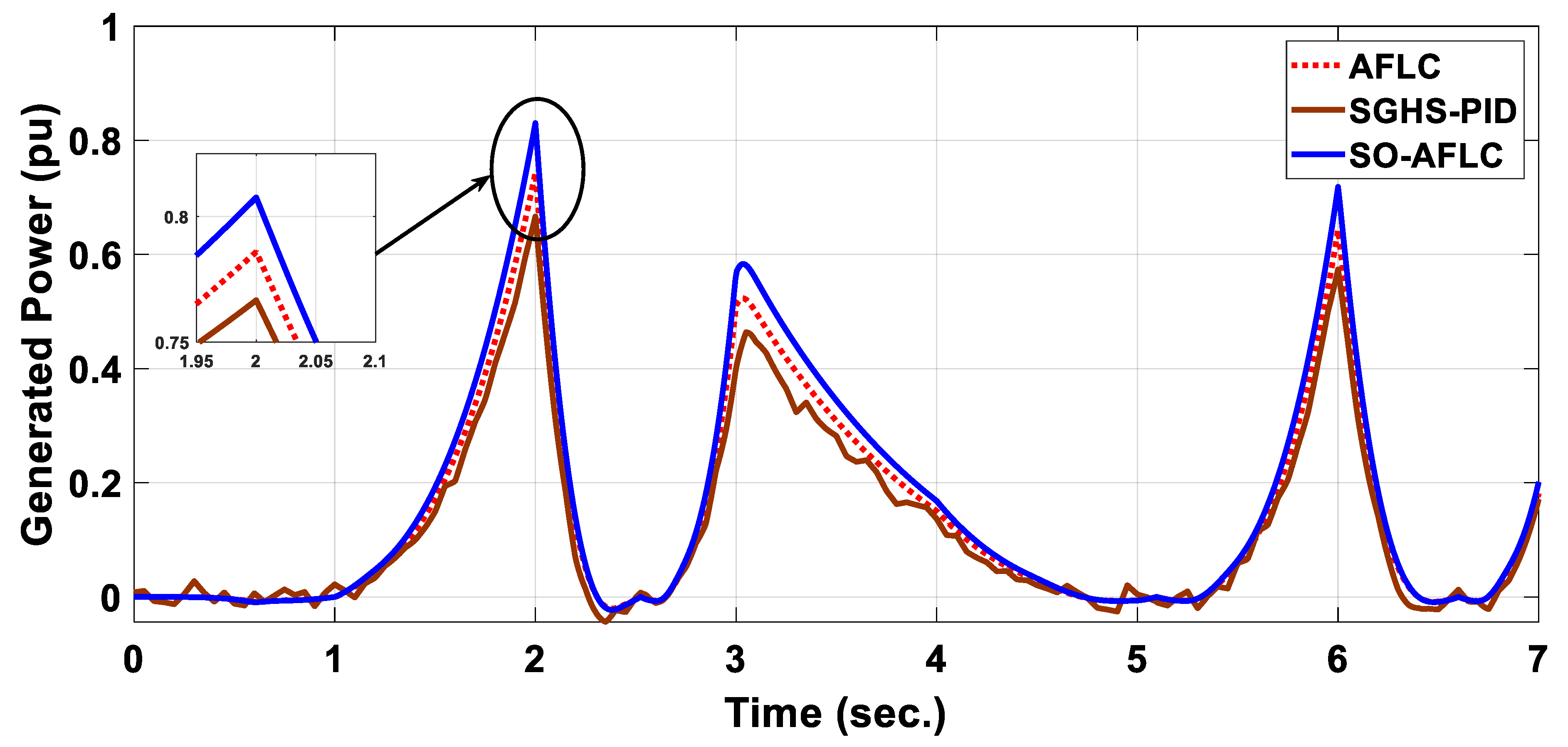
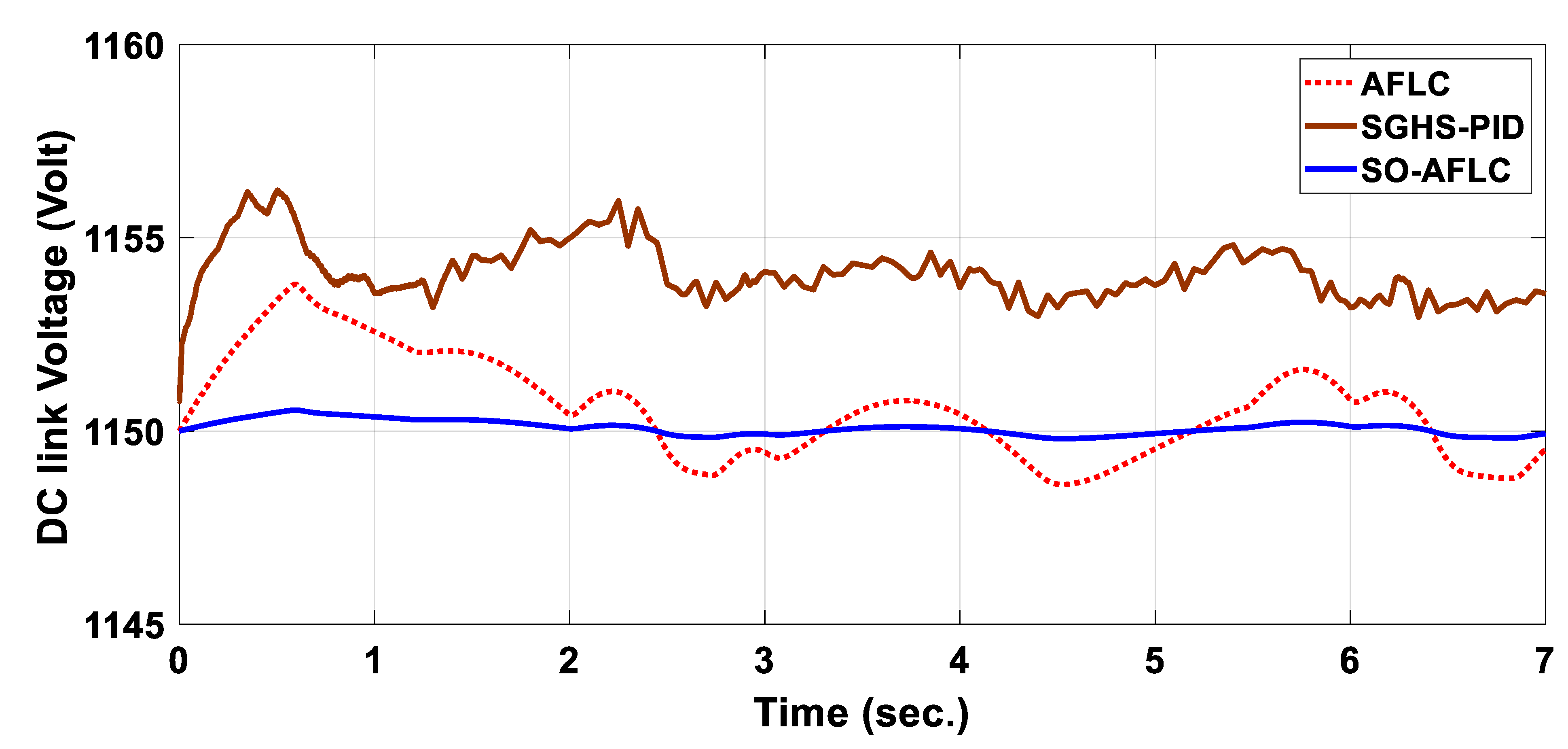
- Improving the power tracking, rotor speed-tracing, and DC link voltage responses.
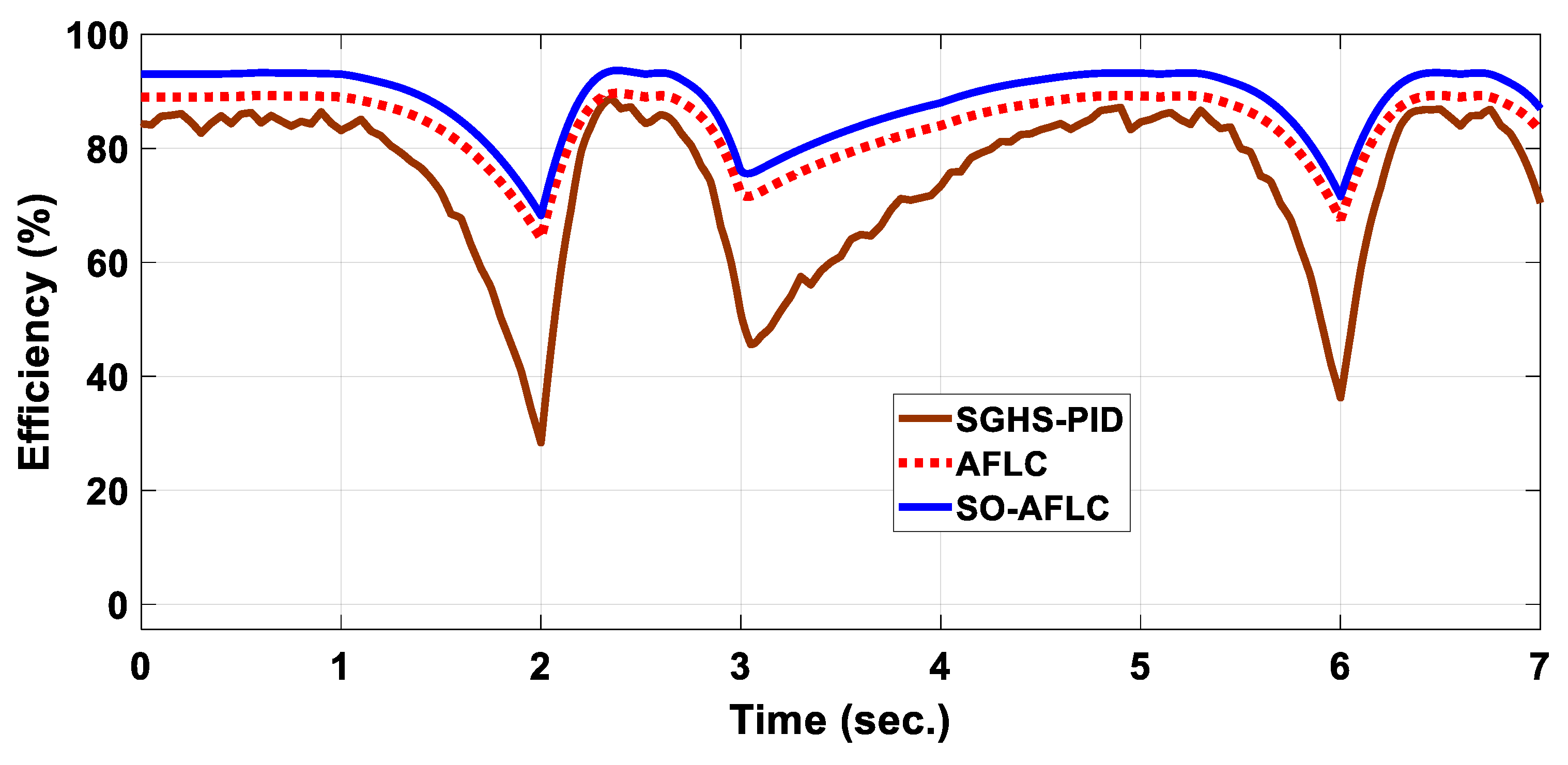
- To demonstrate the SO-AFLC methodology’s feasibility using conventional methods, an evaluation index (IAE) is presented under identical wave conditions.
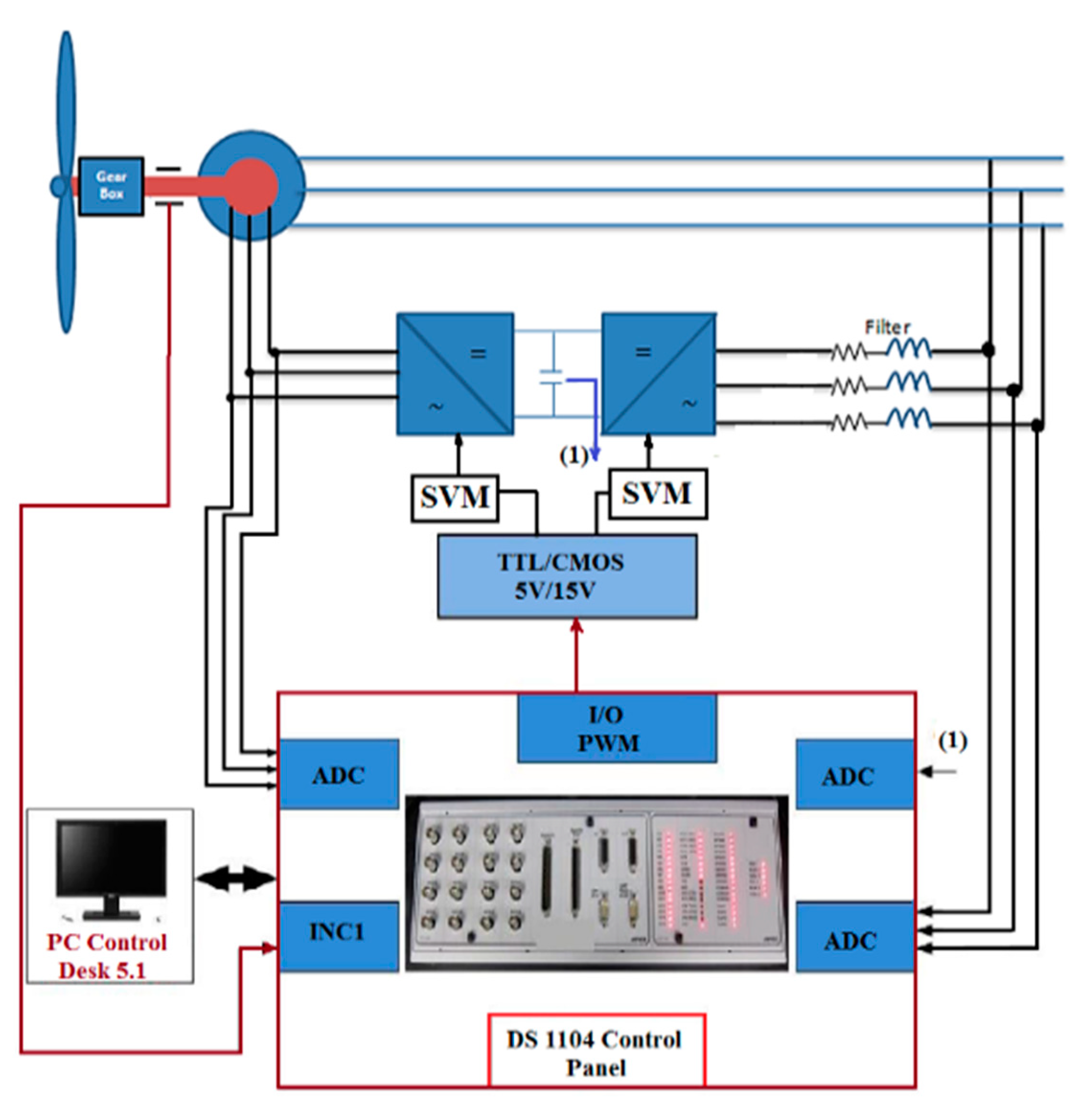
- The validation of the simulation results for the SO-AFLC methodology by evaluating the proposed model using a real-time interface, DSP1104.
2. The Configuration of an Oscillating Water Column Power Plant
2.1. Mechanical Model of OWC Turbine
2.2. DFIG Modelling
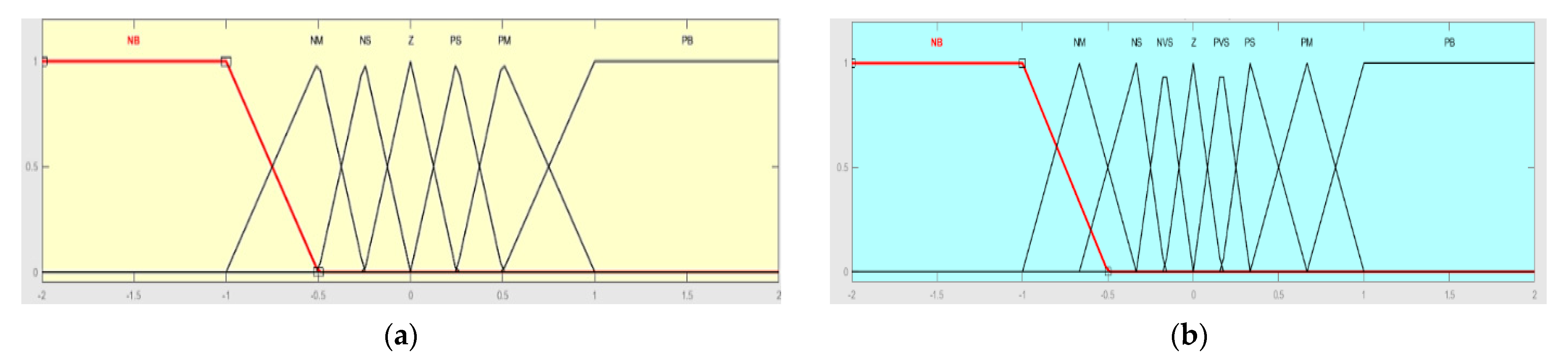
2.3. Adaptive Fuzzy Logic Controller
2.4. Second-Order Adaptive Fuzzy Logic Controller
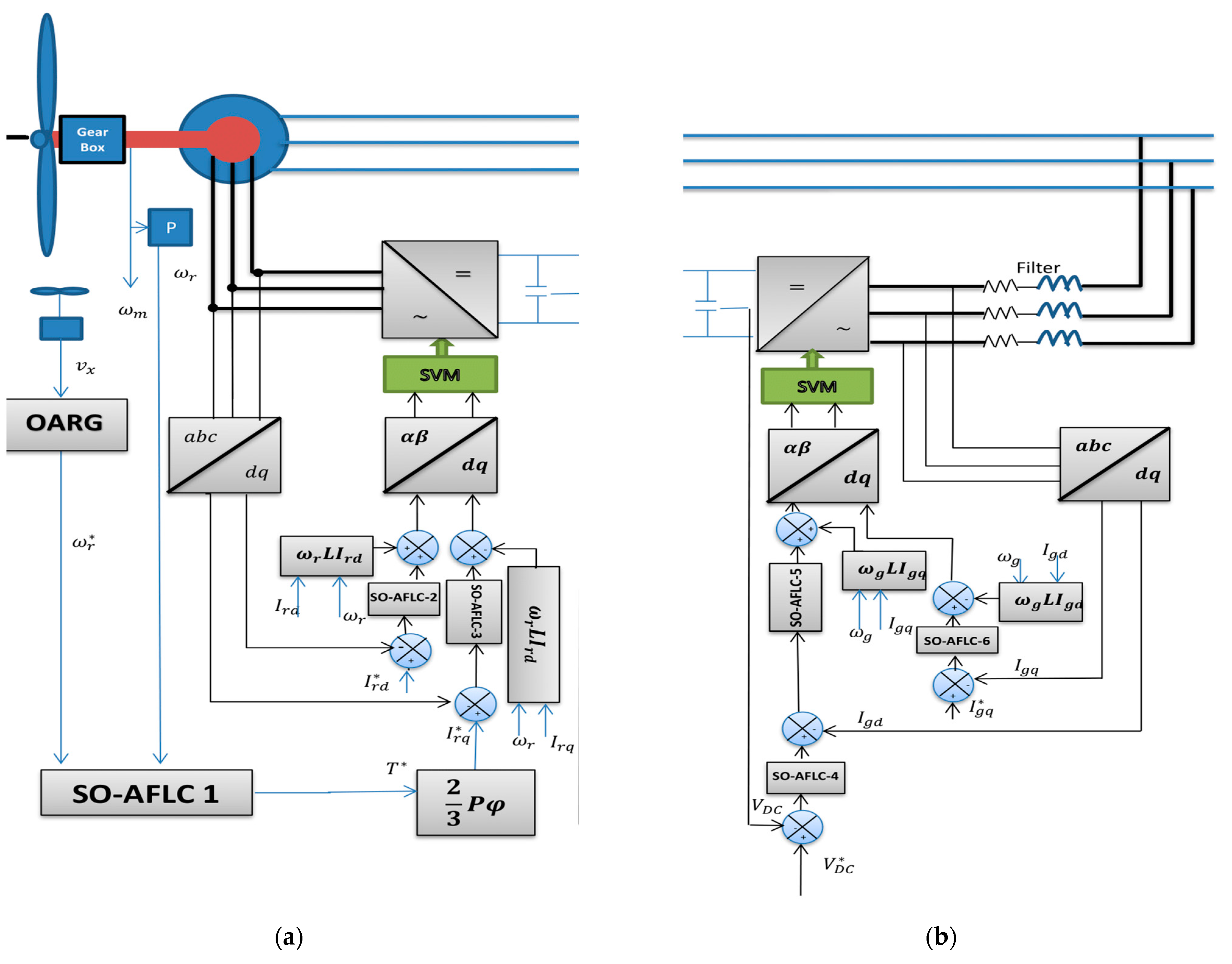
2.5. Grid-Side Converter and Rotor-Side Converter
3. Simulation Results
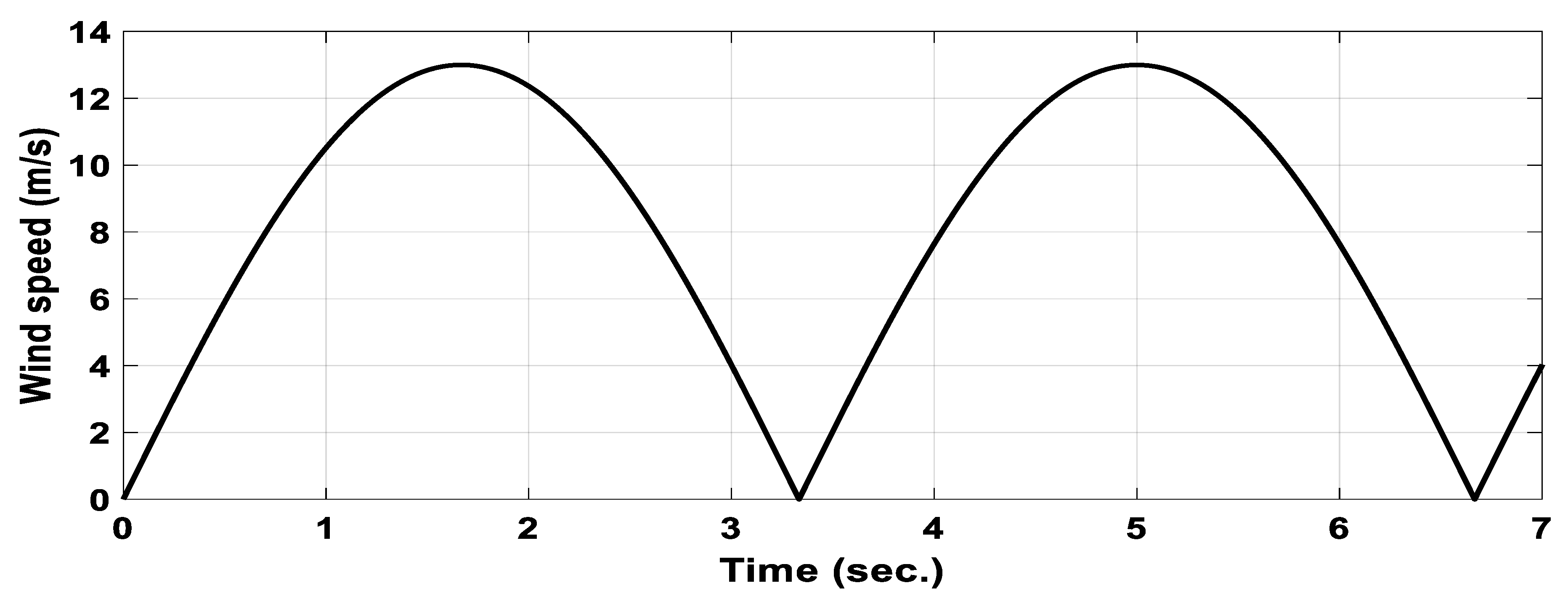
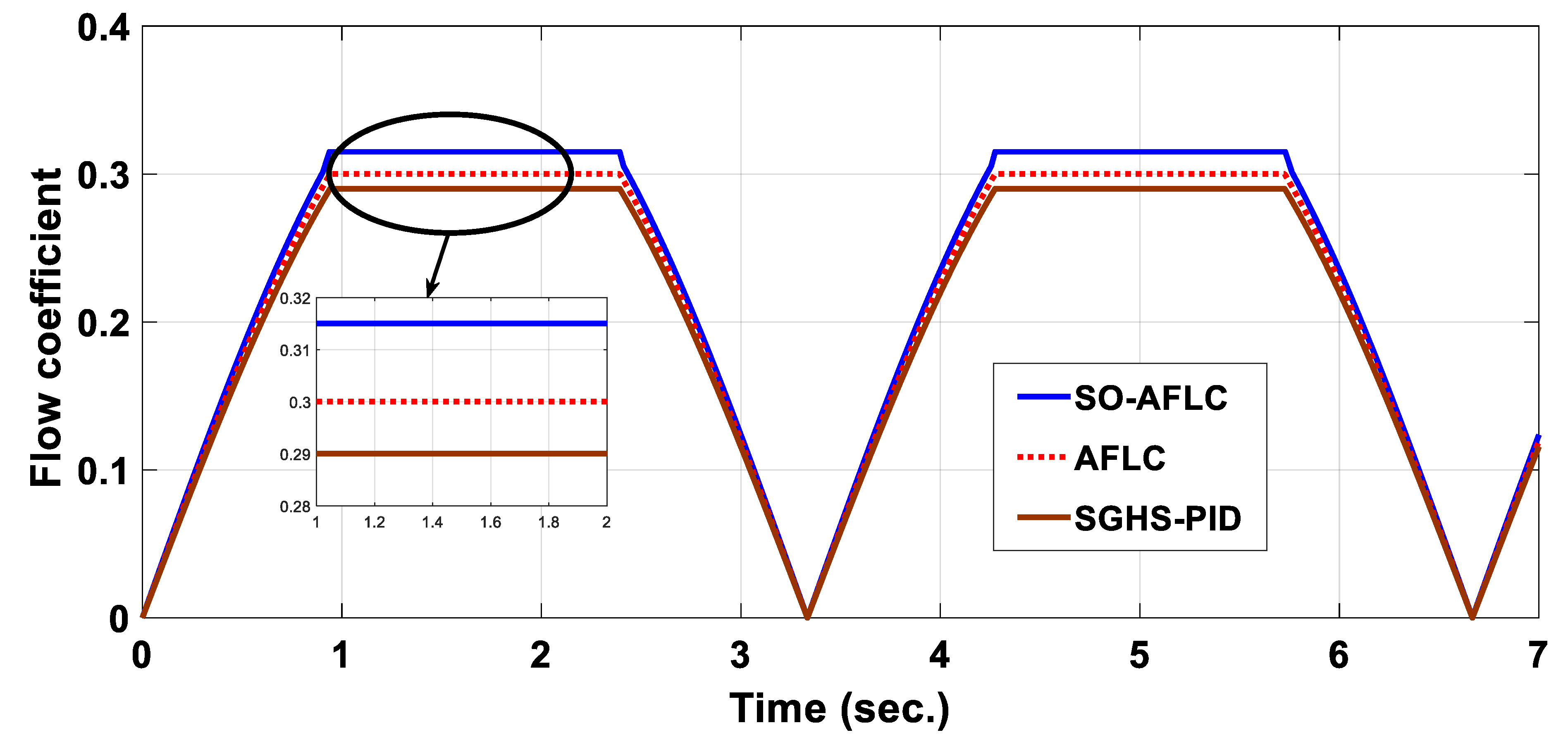
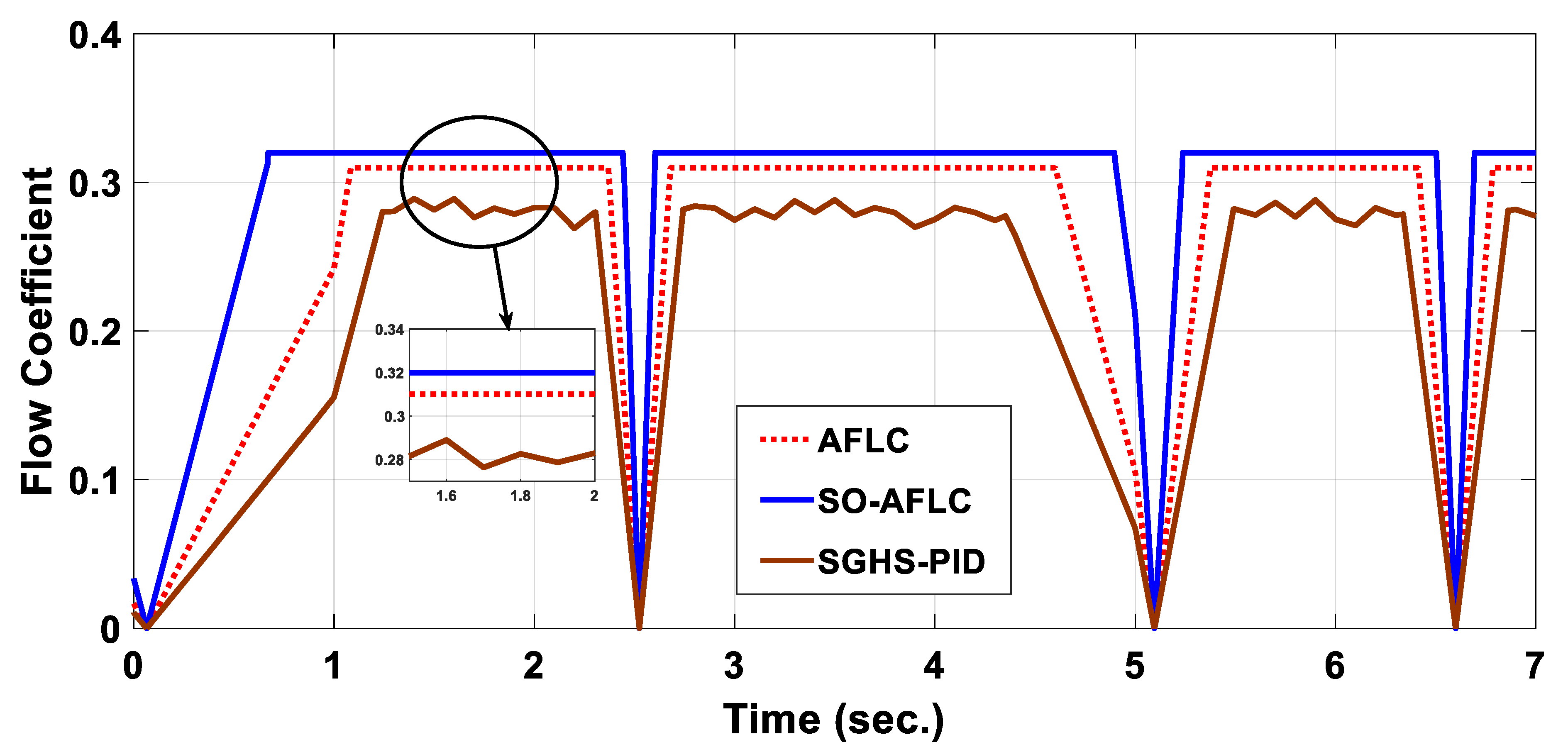
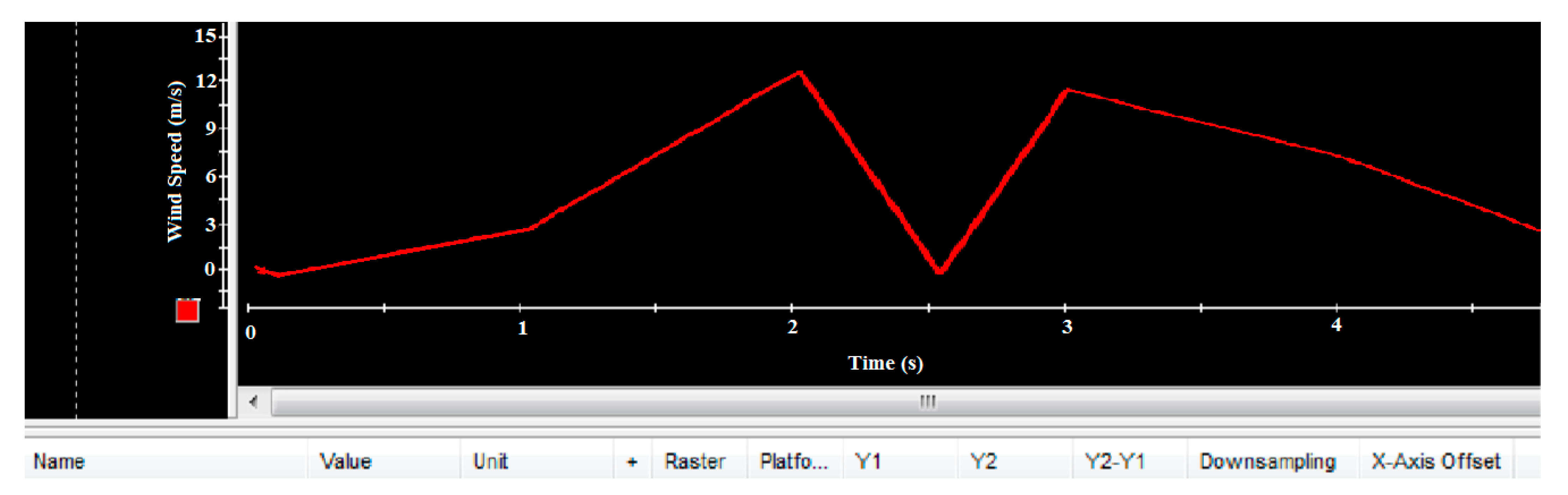
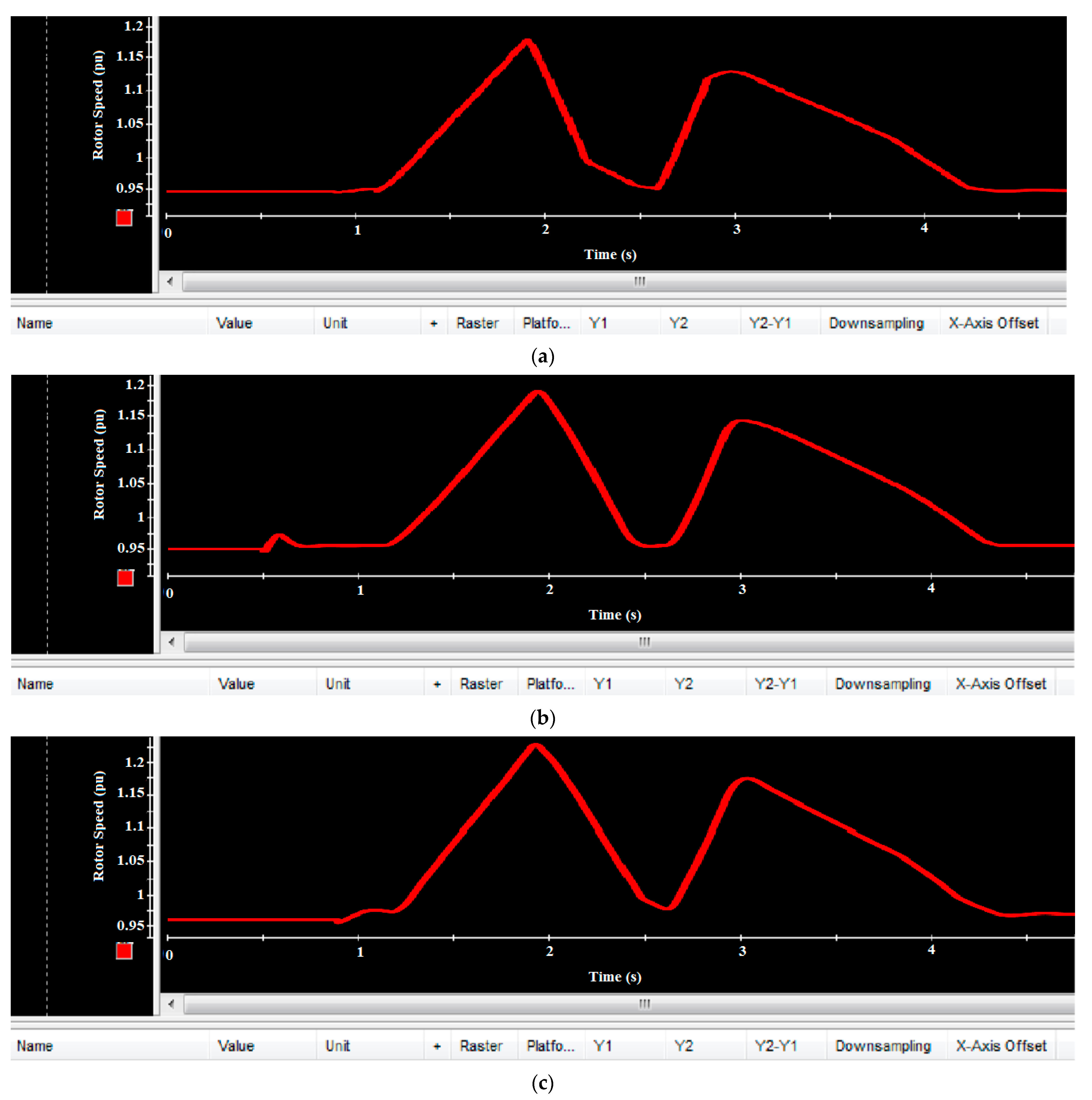
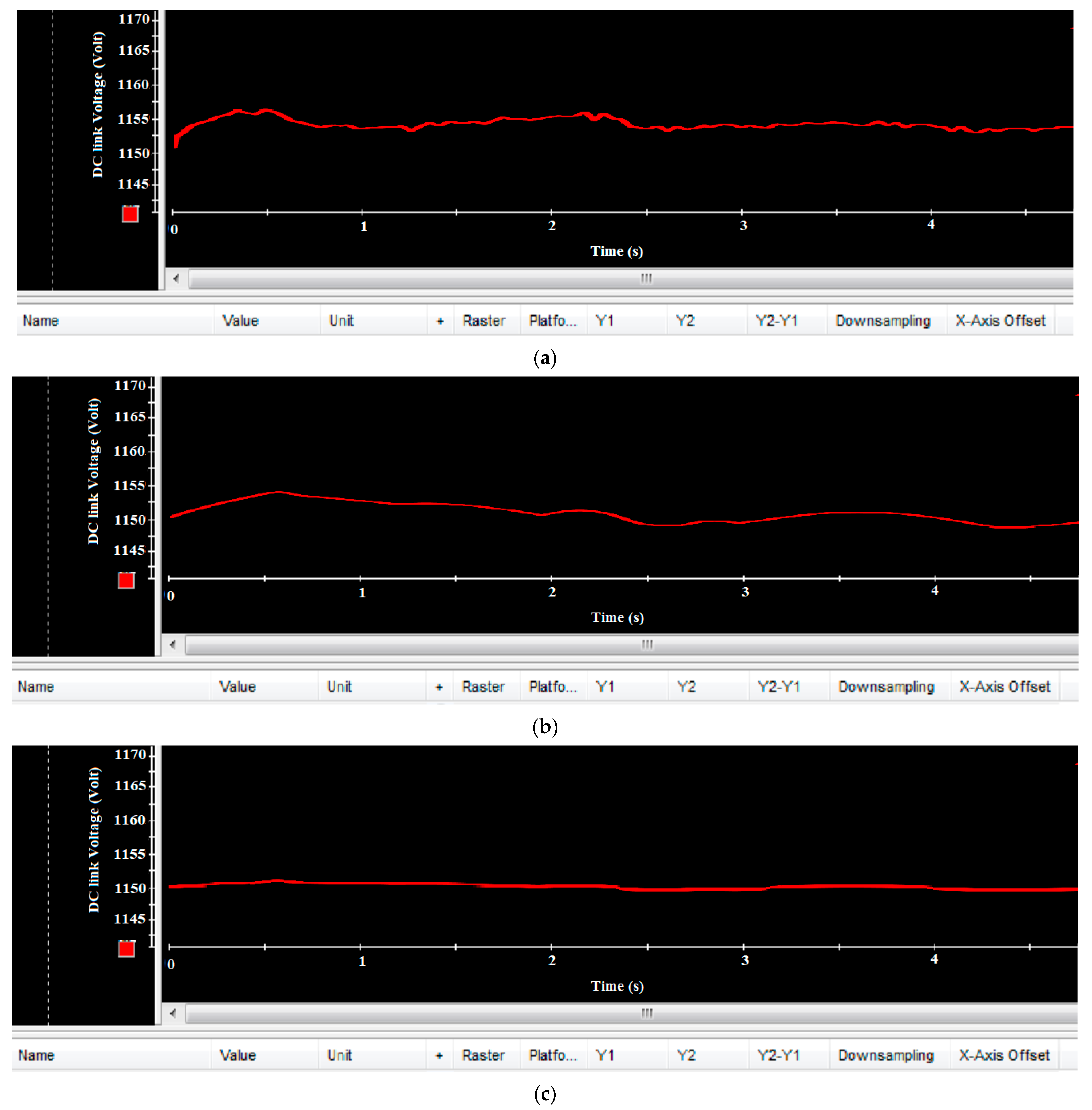
3.1. Case I: Periodic Wave Change
3.2. Case II: Random Wave Change
4. Experimental Setup
5. Experimental Results
- A prime mover: 250 W, with servomotor, 180/220VDC, 3000 rpm.
- An incremental encoder: Speed: 1024 pulses, moment of inertia: 35 gcm2, 6000 rpm.
- A DC chopper circuit: IR2110 IGBT 600V, 50Asc, 1n5819 diode, 2060 MUR super rectifier.
- A DC motor: 180/220VDC, 3000 rpm.
- A voltage/current measurement device.
- The DFIG: 230/400 V, 270 W, 4 poles, 3.2/2 Amp, pf 1/0.75, 50 Hz.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| The turbine pressure drop, the air–pressure difference in the chamber. | |
| The airflow speed. | |
| The air density. | |
| The cross-sectional area of the turbine duct. | |
| /2 | The air kinetic energy. |
| Power coefficient. | |
| Turbine constant. | |
| The mean turbine radius. | |
| ω | The turbine angular velocity. |
| The generated torque in the turbine. | |
| Torque coefficient. | |
| The blade height. | |
| The blade chord length. | |
| The number of blades. | |
| The flow coefficient. | |
| The air flow rate. | |
| The turbine efficiency. | |
| J | The inertia moment. |
| The turbine rotational speed. | |
| The viscosity coefficient. | |
| The turbine torque. | |
| A gear ratio between turbine and generator. | |
| The AFLC’s output. | |
| The generator torque. | |
| and | q-d stator currents. |
| Mutual inductance. | |
| Self stator inductance. | |
| Self rotor inductance. | |
| Stator resistances. | |
| Rotor resistances. | |
| synchronous speed. | |
| and | q-d rotor currents. |
| A tolerably large positive gain at and . |
References
- Mishra, S.K.; Purwar, S.; Kishor, N. Maximizing Output Power in Oscillating Water Column Wave Power Plants: An Optimization Based MPPT Algorithm. Technologies 2018, 6, 15. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. E Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Derbeli, M.; Cortajarena, J.A.; Calvo, I.; Alkorta, P.; Bustamante, P.F. Double Fed Induction Generator Control Design Based on a Fuzzy Logic Controller for an Oscillating Water Column System. Energies 2021, 14, 3499. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Z.; Ostergaard, J.; Dong, Z.Y.; Wong, K.P. Advanced control strategy of DFIG wind turbines for power system fault ride through. IEEE Trans. Power Syst. 2011, 27, 713–722. [Google Scholar] [CrossRef]
- Yin, M.; Xu, Y.; Shen, C.; Liu, J.; Dong, Z.Y.; Zou, Y. Turbine stability-constrained available wind power of variable speed wind turbines for active power control. IEEE Trans. Power Syst. 2016, 32, 2487–2488. [Google Scholar] [CrossRef]
- Abdellatif, W.S.; Hamada, A.; Abdelwahab, S.A.M. Wind speed estimation MPPT technique of DFIG-based wind turbines theoretical and experimental investigation. Electr. Eng. 2021, 103, 2769–2781. [Google Scholar] [CrossRef]
- Lu, K.H.; Hong, C.M.; Han, Z.; Yu, L. New Intelligent Control Strategy Hybrid Grey–RCMAC Algorithm for Ocean Wave Power Generation Systems. Energies 2020, 13, 241. [Google Scholar] [CrossRef]
- Pavel, C.C.; Lacal-Arántegui, R.; Marmier, A.; Schüler, D.; Tzimas, E.; Buchert, M.; Jenseit, W.; Blagoeva, D. Substitution strategies for reducing the use of rare earths in wind turbines. Resour. Policy 2017, 52, 349–357. [Google Scholar] [CrossRef]
- Kumar, G.A.; Shivashankar. Optimal power point tracking of solar and wind energy in a hybrid wind solar energy system. Int. J. Energy Environ. Eng. 2022, 13, 77–103. [Google Scholar] [CrossRef]
- Pang, B.; Dai, H.; Li, F.; Nian, H. Coordinated Control of RSC and GSC for DFIG System under Harmonically Distorted Grid Considering Inter-Harmonics. Energies 2020, 13, 28. [Google Scholar] [CrossRef]
- Gogulamoodi, K.R.; Shaby, S.M.; Ramesh, P. Maximum power point tracking algorithm for grid-connected photo voltaic system. J. Phys. Conf. Ser. 2019, 1172, 012037. [Google Scholar] [CrossRef]
- Bakhshi-Jafarabadi, R.; Sadeh, J.; Popov, M. Maximum power point tracking injection method for islanding detection of grid-connected photovoltaic systems in microgrid. IEEE Trans. Power Deliv. 2020, 36, 168–179. [Google Scholar] [CrossRef]
- Medeiros, A.; Ramos, T.; de Oliveira, J.T.; Medeiros Júnior, M.F. Direct Voltage Control of a Doubly Fed Induction Generator by Means of Optimal Strategy. Energies 2020, 13, 770. [Google Scholar] [CrossRef]
- Garrido, I.; Garrido, A.J.; Alberdi, M.; Amundarain, M.; Barambones, O. Performance of an ocean energy conversion system with DFIG sensorless control. Math. Probl. Eng. 2013, 2013, 260514. [Google Scholar] [CrossRef]
- Alberdi, M.; Amundarain, M.; Garrido, A.; Garrido, I.; Casquero, O.; De la Sen, M. Complementary control of oscillating water column-based wave energy conversion plants to improve the instantaneous power output. IEEE Trans. Energy Convers. 2011, 26, 1021–1032. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J. Symmetry-breaking for airflow control optimization of an oscillating-water-column system. Symmetry 2020, 12, 895. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-adaptive global-best harmony search algorithm-based airflow control of a wells-turbine-based oscillating-water column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- Salem, A.A.; Aldin, N.A.N.; Azmy, A.M.; Abdellatif, W.S. Implementation and validation of an adaptive fuzzy logic controller for MPPT of PMSG-based wind turbines. IEEE Access 2021, 9, 165690–165707. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Sibtain, D.; Murtaza, A.F.; Murawwat, S.; Saadi, M.; Jameel, A. Adaptive fuzzy based optimized proportional-integral controller to mitigate the frequency oscillation of multi-area photovoltaic thermal system. Int. Trans. Electr. Energy Syst. 2021, 31, e12643. [Google Scholar] [CrossRef]
- Zeb, K.; Ali, Z.; Saleem, K.; Uddin, W.; Javed, M.; Christofides, N. Indirect field-oriented control of induction motor drive based on adaptive fuzzy logic controller. Electr. Eng. 2017, 99, 803–815. [Google Scholar] [CrossRef]
- Zeb, K.; Islam, S.U.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Ahmad, I.; Kim, H.J. Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter. Electronics 2019, 8, 520. [Google Scholar] [CrossRef]
- Kochetkov, S.; Krasnova, S.A.; Utkin, V.A. The New Second-Order Sliding Mode Control Algorithm. Mathematics 2022, 10, 2214. [Google Scholar] [CrossRef]
- Eker, I. Second-order sliding mode control with experimental application. ISA Trans. 2010, 49, 394–405. [Google Scholar] [CrossRef] [PubMed]
- Alberdi, M.; Amundarain, M.; Maseda, F.; Barambones, O. Stalling behaviour improvement by appropriately choosing the rotor resistance value in Wave Power Generation Plants. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; pp. 64–67. [Google Scholar]
- Barambones, O.; Gonzalez de Durana, J.M.; Calvo, I. Adaptive Sliding Mode Control for a Double Fed Induction Generator Used in an Oscillating Water Column System. Energies 2018, 11, 2939. [Google Scholar] [CrossRef]
- Jayashankar, V.; Udayakumar, K.; Karthikeyan, B.; Manivannan, K.; Venkatraman, N.; Rangaprasad, S. Maximizing power output from a wave energy plant. In Proceedings of the 2009 International Conference on Clean Electrical Power, Singapore, 23–27 January 2000; Volume 3, pp. 1796–1801. [Google Scholar]
- Sarmento, A.; Gato, L.; Falcao, A.d.O. Turbine-controlled wave energy absorption by oscillating water column devices. Ocean Eng. 1990, 17, 481–497. [Google Scholar] [CrossRef]
- Ghasemi, A.; Refan, M.H.; Amiri, P. Enhancing the performance of grid synchronization in DFIG-based wind turbine under unbalanced grid conditions. Electr. Eng. 2020, 102, 1175–1194. [Google Scholar] [CrossRef]
- Döşoğlu, M.K. Nonlinear dynamic modeling for fault ride-through capability of DFIG-based wind farm. Nonlinear Dyn. 2017, 89, 2683–2694. [Google Scholar] [CrossRef]
- Zamzoum, O.; Derouich, A.; Motahhir, S.; El Mourabit, Y.; El Ghzizal, A. Performance analysis of a robust adaptive fuzzy logic controller for wind turbine power limitation. J. Clean. Prod. 2020, 265, 121659. [Google Scholar] [CrossRef]
- Talla, J.; Leu, V.Q.; Šmídl, V.; Peroutka, Z. Adaptive speed control of induction motor drive with inaccurate model. IEEE Trans. Ind. Electron. 2018, 65, 8532–8542. [Google Scholar] [CrossRef]
- Benkahla, M.; Taleb, R.; Boudjema, Z. Comparative study of robust control strategies for a DFIG-based wind turbine. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 2. [Google Scholar] [CrossRef]
- Elnaghi, B.E.; Abelwhab, M.N.; Ismaiel, A.M.; Mohammed, R.H. Solar Hydrogen Variable Speed Control of Induction Motor Based on Chaotic Billiards Optimization Technique. Energies 2023, 16, 1110. [Google Scholar] [CrossRef]
- Mohammed, R.H.; Ismaiel, A.M.; Elnaghi, B.E.; Dessouki, M.E. African vulture optimizer algorithm based vector control induction motor drive system. Int. J. Electr. Comput. Eng. 2023, 13, 2088–8708. [Google Scholar] [CrossRef]
- Ratrey, R.; Dewangan, M.S.R. A Review on wind power generation using neural and fuzzy logic. Int. Res. J. Eng. Technol. 2021, 8, 0072–2395. [Google Scholar]
- Sheng, W.; Li, H. A Method for Energy and Resource Assessment of Waves in Finite Water Depths. Energies 2017, 10, 460. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | PS | PM | PB | Z | NS | NM | NB |
|---|---|---|---|---|---|---|---|
| Δe | |||||||
| NB | NS | NVS | Z | NM | NB | NB | NB |
| NM | NVS | Z | PVS | NS | NM | NB | NB |
| NS | Z | PVS | PS | NVS | NS | NM | NB |
| Z | PVS | PS | PM | Z | NVS | NS | NM |
| PS | PS | PM | PB | PVS | Z | NVS | NS |
| PM | PM | PB | PB | PS | PVS | Z | NVS |
| PB | PB | PB | PB | PM | PS | PVS | Z |
| Frequency (f) | Rotor Resistance | Stator | Stator Leakage Inductance | Rotor Leakage Inductance | Magnetization Inductance | No. of Pair Poles | ||
|---|---|---|---|---|---|---|---|---|
| 50 Hz | 575 V | 0.0050 pu | 0.0071 pu | 0.171 pu | 0.1560 pu | 2.9 pu | 3 |
| PID | AFLC | SO-AFLC | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Controller 1 | 23.64 | 14.775 | 8.755 | 0.1563 | 10.759 | 4.589 | 9.756 | 4.659 | 2.538 | 14.189 | 6.698 | 10.268 | 5.272 | 3.3 |
| Controller 2 | 4.185 | 1.581 | 0.239 | 2.258 | 5.236 | 1.549 | 5.214 | 1.248 | 3.689 | 5.869 | 1.869 | 7.456 | 2.528 | 1.8 |
| Controller 3 | 6.984 | 3.91 | 1.235 | 0.312 | 1.688 | 2.516 | 8.345 | 0.2789 | 0.254 | 1.007 | 3.681 | 9.355 | 2.6029 | 1.9 |
| Controller 4 | 5.06 | 1.628 | 0.853 | 0.9815 | 8.146 | 0.2789 | 1.6345 | 0.544 | 1.003 | 8.023 | 0.3892 | 1.7455 | 0.714 | 1.6 |
| Controller 5 | 0.89 | 2.013 | 1.023 | 1.246 | 0.177 | 5.8721 | 0.0023 | 6.234 | 1.756 | 0.225 | 7.78 | 0.35 | 9.005 | 1.14 |
| Controller 6 | 3.287 | 1.256 | 0.028 | 2.4902 | 8.012 | 0.0154 | 6.567 | 0.002 | 3.523 | 8.443 | 0.254 | 8.546 | 0.0001 | 2.002 |
| Controller 1 | Controller 2 | Controller 3 | Controller 4 | Controller 5 | Controller 6 | Mean Square | |
|---|---|---|---|---|---|---|---|
| PID | 0.216 | 0.106 | 0.115 | 0.201 | 0.0135 | 0.06 | 0.019216708 |
| AFLC | 0.023 | 0.003 | 0.112 | 0.126 | 0.0128 | 0.00828 | 0.004865 |
| SO-AFLC | 0.013 | 0.002 | 0.087 | 0.098 | 0.0067 | 0.0053 | 0.0029 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elnaghi, B.E.; Abelwhab, M.N.; Mohammed, R.H.; Abdel-Kader, F.E.S.; Ismaiel, A.M.; Dessouki, M.E. The Validation and Implementation of the Second-Order Adaptive Fuzzy Logic Controller of a Double-Fed Induction Generator in an Oscillating Water Column. Electronics 2024, 13, 291. https://doi.org/10.3390/electronics13020291
Elnaghi BE, Abelwhab MN, Mohammed RH, Abdel-Kader FES, Ismaiel AM, Dessouki ME. The Validation and Implementation of the Second-Order Adaptive Fuzzy Logic Controller of a Double-Fed Induction Generator in an Oscillating Water Column. Electronics. 2024; 13(2):291. https://doi.org/10.3390/electronics13020291
Chicago/Turabian StyleElnaghi, Basem E., M. N. Abelwhab, Reham H. Mohammed, Fathy El Sayed Abdel-Kader, Ahmed M. Ismaiel, and Mohamed E. Dessouki. 2024. "The Validation and Implementation of the Second-Order Adaptive Fuzzy Logic Controller of a Double-Fed Induction Generator in an Oscillating Water Column" Electronics 13, no. 2: 291. https://doi.org/10.3390/electronics13020291