
QoS-Driven Slicing Management for Vehicular Communications



Abstract
:1. Introduction
2. Preliminary of Intelligent NS in Vehicular Communications
2.1. Primary Enabling Paradigms
2.2. Add-on Paradigms for Intelligence
2.3. Slice Instances in Vehicular Communications
3. Proposed System Framework
3.1. Working Flow
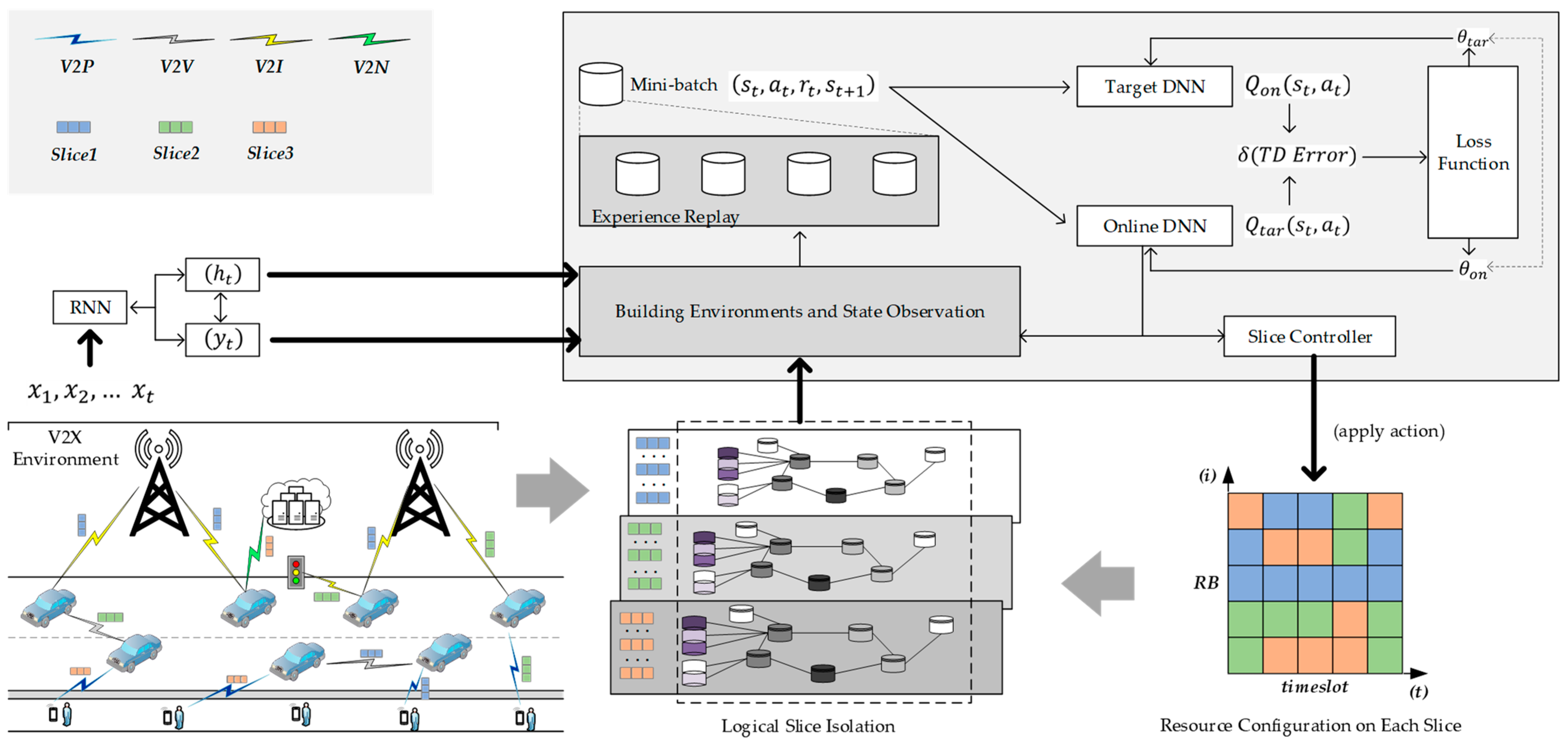
- Tier-1. We represent SBSs with three possible general entities, denoted as , to symbolize eNodeB, gNodeB, or access points as vehicular NFV-enabled edge computing and network connectivity. eNodeB or gNodeB, the base station component of LTE and 5G networks, can be deployed with NFV infrastructure. Traditionally, eNodeB and gNodeB have been implemented as dedicated hardware appliances, but NFV enables the virtualization of eNodeB functions onto general-purpose hardware, such as servers or (edge) cloud platforms. In our framework, tier-1 is prioritized for low-latency slicing services since it is a computing resource-constrained environment. Vehicle nodes are denoted as . Upon receiving the service request at timeslot-, denoted as , the SDN controller collaborates with the NFV orchestrator to determine the optimal network path for V2X traffic within the requested service . The controller observes and considers the capabilities of the SBS resources, current topology states, and traffic patterns, denoted as . is input to the main RNN execution, part of RDQ3N. The SDN controller translated the determined path into flow rules, which are instructions to direct traffic in tier-1 enabling slicing-aware traffic forwarding.
- Tier-2. We denote MBS as with higher resource capabilities. In this tier, the SDN controller continuously monitors the network load and traffic patterns within the network slice. The controller adjusts traffic flow across MBS- in tier-2, which ensures that the load is distributed evenly and that V2X traffic receives the QoS-driven priority based on the sliced modelling. As node- moves across the network, the controller coordinates with the mobility management entity to manage handover between MBSs within the network slice, while ensuring that V2X communication remains uninterrupted and that QoS expectation is maintained during handover.
- Tier-3. We refer to the evolved packet core (EPC), 5G core networks, or core data center. The SDN controller establishes and manages connectivity to external entities for the network slice, therefore enabling V2X communication with entities outside the slice. The core entity collects hidden states and QoS metrics proactively from our proposed RDQ3N (main RNN) to build a virtual representational environment. The NFV orchestrator, in conjunction with the virtual network functions manager (VNFM), orchestrates the allocation of NFV resources, such as virtual network functions (VNFs) and computing resources, to the defined slice instances. The VNFM deploys and configures the required VNFs onto the allocated SBS resources in tier-1, while ensuring that the required network functionalities are provided within the slice.
3.2. Slice Instances
- Slice 1. The safety-critical slice instance is prioritized with ultra-reliable transmission of mission-critical services, while ensuring rapid latency with a maximum delay of 1–20 ms. The data rate ranges from 1 Mb/s to 10 Mb/s, which emphasizes vehicle-cooperative awareness messages that require low bandwidth but more dense requests. Scalability can be between 50 and 200. Reliability expectation is targeted as high. If the agent outputs actions on slice identification as , the allocation metrics in MBS- and scheduling in SBS- will be higher priority compared to and .
- Slice 2. The ITS-supported slice instance acknowledges the importance of assisting applications that enhance traffic management and efficiency. With a maximum delay of 1–50 ms, slice 2 balances low-latency requirements with broader application coverage. The data rate is in the same range as with safety-critical applications. Scalability is specified between 50 and 100. The reliability level for ITS-supported applications is classified as medium compared to slice 1. The guaranteed bit rates can be arranged less than in congestion states.
- Slice 3. The on-board infotainment slice instance caters to non-safety-related services that prioritize high data rates for non-mission-critical streaming entertainment. With a maximum delay of up to 100 ms, slice 3 allows for a more relaxed transmission timeframe. The data rate spans from 0.5 Mb/s to 15 Mb/s, accommodating the varying bandwidth needs of heavy-traffic streaming data for infotainment content. Scalability is less, ranging from 5 to 15. The reliability level for this slice is classified as low since it can afford the unavoidable loss in a congested and constrained timeslot.
4. RDQ3N-Assisted Intelligent Slice Controller
4.1. Environment Components
4.2. QoS-Driven Models
4.3. Algorithm Flows
| Algorithm 1. Training RDQ3N for QoS-Driven Slicing Management | ||||
| 1: | Initialize the main DQN with early online and target DNNs | |||
| 2: | ||||
| 3: | ||||
| 4: | For each step do: | |||
| 5: | of vehicular edge-core systems and NFV-based infrastructure | |||
| 6: | For each timeslot t do: | |||
| 7: | ||||
| 8: | -greedy | |||
| 9: | SliceController() to SDN steering and NFV-enabled infrastructure | |||
| 10: | ||||
| 11: | // store the batch to experience replay | |||
| 12: | Sample mini-batch from and perform OptimizeOnline(): | |||
| 13: | // general target-Q | |||
| 14: | Use online DNN: // early-Q | |||
| 15: | // TD error | |||
| 16: | // loss function | |||
| 17: | Minimize Loss: Backpropagation | |||
| 18: | // update weights on online DNN | |||
| 19: | Update target DNNs | |||
| 20: | // update weights on online DNN | |||
| 21: | // compared to main RNN output | |||
| 22: | Update reward efficiency and OptimizeTarget() for | |||
| 23: | Alter environment to for next-timeslot | |||
| 24: | End for | |||
| 25: | End for | |||
5. Experiment and Results
5.1. Environment Setup
- Integration infrastructure. To effectively evaluate the performance of the intelligent slice controller, a comprehensive simulation setup was designed on Mininet-based host core topology and PyTorch-based RDQ3N training. PyTorch was selected as the framework due to its flexibility and dynamic computation graph, while Gymnasium provided support functions for developing the representational V2X environment. Mininet was employed for SDN (RYU controller) and NFV simulation to offer a scalable flow entry installation and customizable resource virtualization.
- RDQ3N execution. The RNN configuration, with a hidden size of 256, two layers, and an input size of 10, was chosen to handle features in this V2X environment. A dropout rate of 0.2 helped prevent overfitting in our process. The DQN configuration, with a learning rate of 0.001, a discount factor of 0.99, and an exploration rate starting at 0.9, ensured stable training and balanced immediate and future rewards. A large replay buffer size (1,000,000) and batch size (128) facilitated effective experience replay. Target DNN update frequency of 1000 steps provided stability, and an initial exploration phase of 5000 steps helped gather the V2X experiences. The environment parameters, with a small action space (three actions) and a state space of 12 parameters, simplified learning complexity and also provided enough observations for the RDQ3N agent. Longer training steps for the DQN (100,000) compared to the RNN (10,000) accounted for the criteria of Q convergence. ReLU, Sigmoid, and Tanh activation functions offered non-linearity for diverse action selections and prediction classes throughout the framework. The training steps match the transmission flows generated by the Mininet emulator for 10 h.
- Service flow and request operations. The slice configuration is three instances, and there are 120 vehicle nodes, 10 tier-1 (SBS), 2 tier-2 nodes (MBS), and service requests at a rate of 1000 per second, aimed at modeling a realistic V2X environment. This comprehensive setup aimed to strike a balance between the real-world environment, computational efficiency, and our proposed QoS-driven model in vehicular communications.
5.2. Proposed and Reference Schemes
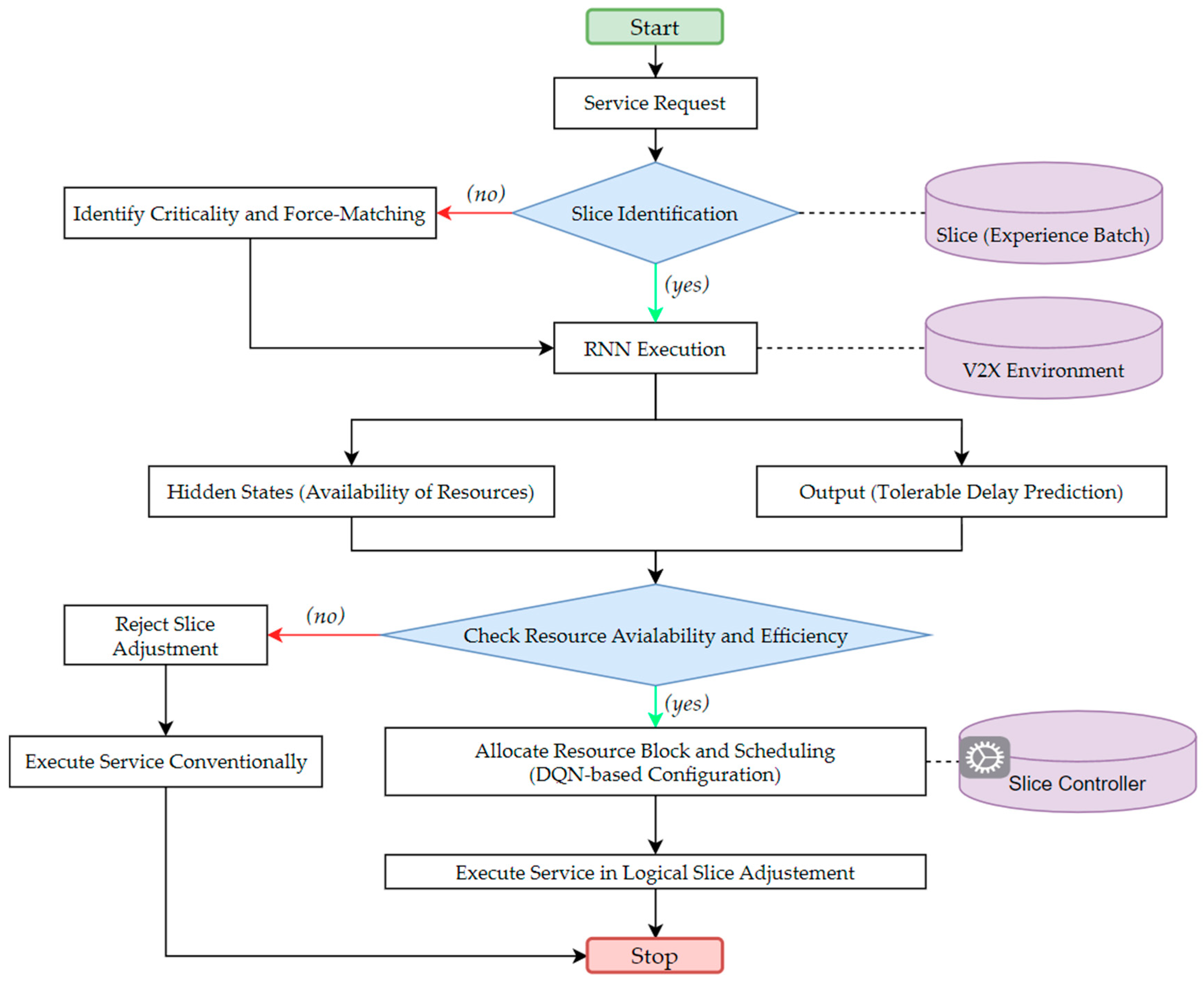
- Initial service request: The execution phase begins with the reception of a service request from a node- or vehicular application. The processing request encapsulates the specific requirements of the application.
- Slice identification: The next step involves identifying the appropriate network slice for the received service request, which is achieved through a two-way approach:
- ○
- Slice container (experience batch) or new RNN execution: The system maintains a slice container, also known as an experience batch, which stores slice identifiers and early QoS predictions. The experience batch is leveraged to efficiently identify the most suitable slice for the current service request (less computing response).
- Criticality identification and force-matching: In cases where the slice cannot be identified for the service request, a criticality identification process is triggered. Our system assesses the urgency of the service request and force-matches it with the closest slice instance (class 1, 2, or 3) to ensure real-time service delivery.
- RNN-assisted proactivity: When the slice is identified from the experience batch or force-matching, the main RNN from RDQ3N is employed to predict and gather the hidden resource availability states . The main RNN component interacts with the V2X environment (tier-1) to gather real-time input state .
- QoS prediction validation: The predicted QoS output is compared against the maximum tolerable delay associated with the pre-determined slice. If the predicted QoS does not meet the delay threshold, the predicted feature is synchronized to the RDQ3N, the main DQN agent. The feedback mechanism enables the main DQN component in RDQ3N to refine its policy for future slice identifications.
- Resource allocation and scheduling: Once the slice is identified, the execution phase proceeds with resource allocation and scheduling.
- ○
- Resource availability gathering: The main RNN component in RDQ3N, in conjunction with the V2X environment (tier-1), gathers input and output features to maintain hidden states reflecting resource availability and QoS predictions. This real-time resource monitoring enables a major weight in the placement process.
- ○
- Resource availability utilization: The intelligent controller checks the availability and efficiency of the resources associated with the selected slice. If the resources are sufficient and efficiently utilized, the main DQN component in RDQ3N proceeds with current actions , , and .
- ○
- Resource unavailability handling: If the required resources (for serving the current requests) are not available at the specified timeslot, the slice instantiation and adjustment are rejected. In this case, the framework routes the service request to be executed conventionally without logical slice isolation.
5.3. Evaluation Metrics
- The loss (train, validation) and accuracy (train, validation) in executing the main RNN associated with tier-1 vehicular edge environment input are captured and illustrated in Figure 3. The training of the RDQ3N (RNN) for predicting early QoS and hidden states based on resource availability using Mininet-generated flow features demonstrates significant effects on slicing management. Initially, the main RNN components obtained high training and validation losses with low accuracy within the first 100 steps. However, as training progresses, both training and validation losses decrease substantially, and accuracy reaches 98.71% at step [170/10,000]. The model maintains high accuracy and relatively low losses throughout the rest of the training process, with the exception of a slight increase in validation loss (early high peak of 0.1399) at step [2750/10,000]. The problem encountered with validation loss increment suggests a possible degree of overfitting or the need for further regularization. Despite this, the validation accuracy remains high, at an average of 97.18%, indicating that the model is still capable of making reliable QoS predictions. We obtained this result to showcase the applicability of the RDQ3N model to improve NS control in vehicular communications. However, the slight increase in validation loss at the later stage of training suggests that the model may not generalize well to new, namely unseen vehicular communication scenarios. Therefore, we integrated DQN into RDQ3N to tackle the generalization by evaluating the actions taken with three sub-rewards concurrently. With future unsatisfied rewards, RDQ3N activates the actions on hyperparameter tuning, batch normalization, regularization, and cross-validation for better assessment of the model and generalizability.
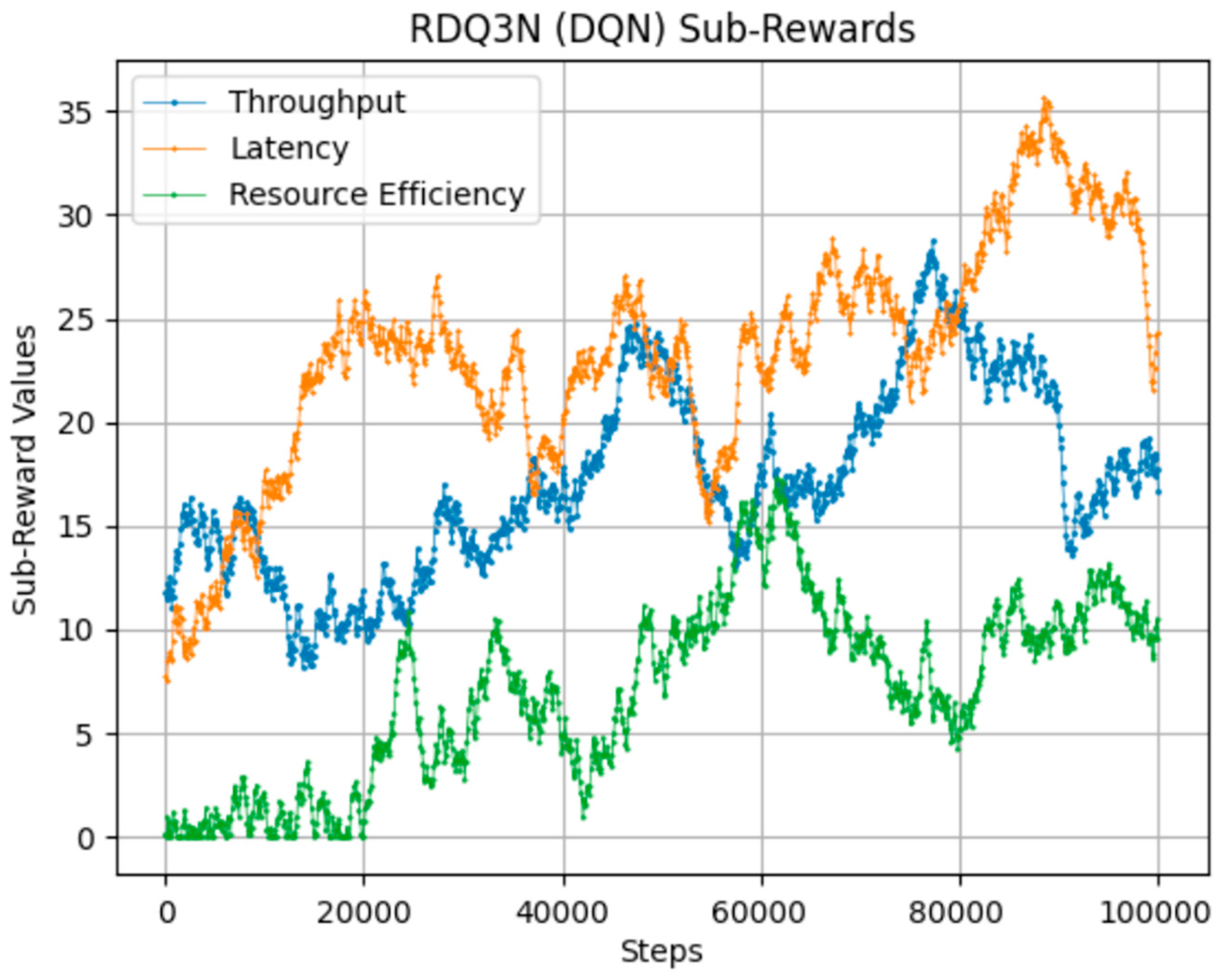
- The main reward, given in Equation (3), consists of three potential QoS-driven sub-components: (1) throughput , (2) latency , and (3) resource efficiency . Figure 4 illustrates each sub-reward within 100,000 steps of RDQ3N (DQN component). The optimal main reward is a total value of 100, which balances each sub-reward from ranges of 20 to 40, depending on the incoming service requests in that particular timeslot. However, throughout our simulation execution (Mininet-generated flows), the congestion states varied, and the reward performance fluctuated to reflect the randomness of the V2X environment. Our proposed QoS-driven settings prioritized latency performance (slices 1 and 2) higher than throughput-maximized slice 3 (infotainment streaming). Therefore, the better results of the sub-reward of latency reflect our expectations compared to the other two sub-rewards. Resource efficiency remains challenging to overcome at every high-peak congestion state, which illustrates a low fluctuation value range between 0 to the highest peak of 17.87 and at the end of 10.09. However, RDQ3N remains effective in showcasing satisfied service request processing, acceptance, and successful ratios compared to reference schemes.
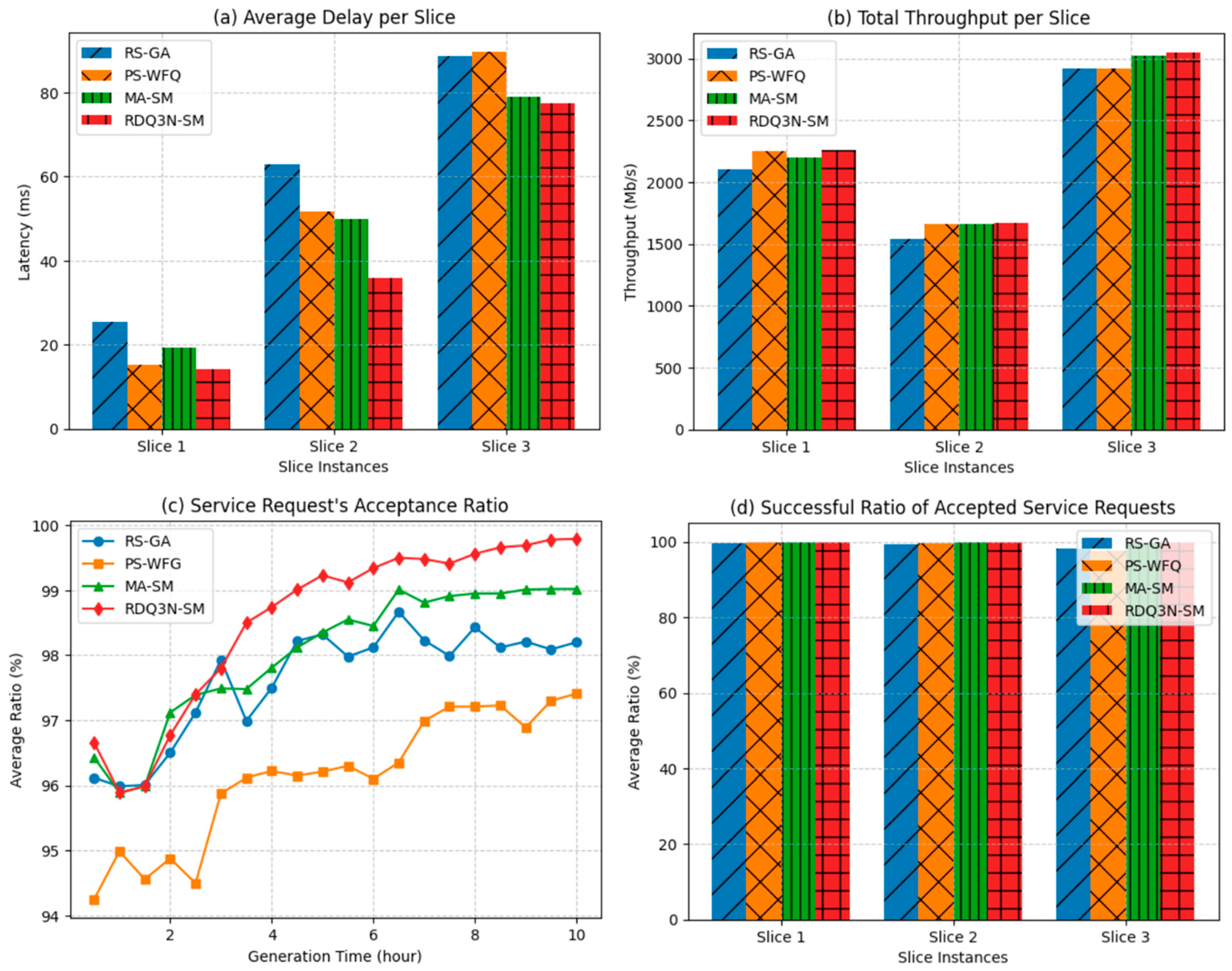
- The average delay per slice, total throughput, acceptance ratios, and successful ratios of the V2X service requests are plotted in Figure 5 in parts (a), (b), (c), and (d), respectively. Within 10 h of service flow generations at a constant rate of 1000 requests per second, our proposed RDQ3N-assisted intelligent slice controller obtained an average delay of 14.24 ms for safety-critical slice (), which is 4.99 ms, 0.99 ms, and 11.31 ms lower than the average delay of MA-SM, PS-WFQ, and RS-GA, respectively. For the other 2 slice instances ( and ), the improvements from our scheme achieved (14 ms, 1.61 ms), (15.9 ms, 12.35 ms), and (32.1 ms, 11.37 ms) better than MA-SM, PS-WFQ, and RS-GA, respectively. In Figure 5b, the total throughput represents the efficiency of bandwidth resource allocation and scheduling for each instance. By comparing reference schemes, we can showcase that the RDQ3N improvements are highly notable, with 2255.88 Mb/s, 1671.02 Mb/s, and 3050.12 Mb/s on slices 1, 2, and 3, respectively. PS-WFQ prioritized slice 1 as the most significant serving resource (2254.12 Mb/s); however, PS-WFQ’s throughput on slice 3 had the lowest outcome (2921.09 Mb/s) among all the management schemes due to the bias toward less priority. Our scheme aimed to balance (1) priority in constrained states and (2) high transmission rates in non-congested states; therefore, the throughput outcome for all three slices is well preserved. The throughputs of MA-SM and RS-GA are (2200.14 Mb/s, 1662.88 Mb/s, and 3021.12 Mb/s) and (2191.04 Mb/s, 1650.23 Mb/s, 3013.91 Mb/s), on each slice instance, respectively. The improved throughput of RDQ3N is critical for massive machine-type communications, ultra-dense requests, and resource-constrained environments. Figure 5c illustrates the acceptance ratios of initial service requests, which depend on how each scheme optimizes the resource availability, QoS efficiency, and slice instantiation process. Within the first 4 h flow generation, RDQ3N had an acceptance ratio below 99.00%; however, from the fifth-hour simulation, RDQ3N gained experience batch, environment awareness, and Q convergence that led to better performances from 99.01% to 99.79%. From this point to the end of simulation time, RDQ3N maintained a satisfied acceptance rate on average of 99.46%, which is 0.7016%, 2.6891%, and 1.2491% higher than MA-SM, PS-WFQ, and RS-GA, respectively. From the fifth-hour timeframe, MA-SM, PS-WFQ, and RS-GA achieved only 98.76%, 96.77%, and 98.21% acceptance ratios, respectively. The acceptance ratios illustrate how the slice controller is able to proactively plan the steering path and resource orchestration placement; however, only successful (completion) ratios can truly determine the reliability metric of the management scheme. Figure 5d showcases the success percentage of all accepted service requests. Table 5 gives the successful ratios of each slice between the proposed and reference schemes.
6. Conclusions and Future Studies
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular Communications for ITS: Standardization and Challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An Overview of Vehicular Communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Jing, T.; Yu, H. An Integrated Dependability Guarantee Provisioning for Cluster-Based IoV Networks with Slicing. IET Intell. Transp. Syst. 2023, 17, 1752–1768. [Google Scholar] [CrossRef]
- Sanchez-Iborra, R.; Santa, J.; Gallego-Madrid, J.; Covaci, S.; Skarmeta, A.F. Empowering the Internet of Vehicles with Multi-RAT 5G Network Slicing. Sensors 2019, 19, 3107. [Google Scholar] [CrossRef]
- Wijethilaka, S.; Liyanage, M. Survey on Network Slicing for Internet of Things Realization in 5G Networks. IEEE Commun. Surv. Tutor. 2021, 23, 1. [Google Scholar] [CrossRef]
- Afolabi, I.; Taleb, T.; Samdanis, K.; Ksentini, A.; Flinck, H. Network Slicing and Softwarization: A Survey on Principles, Enabling Technologies, and Solutions. IEEE Commun. Surv. Tutor. 2018, 20, 2429–2453. [Google Scholar] [CrossRef]
- Su, R.; Zhang, D.; Venkatesan, R.; Gong, Z.; Li, C.; Ding, F.; Jiang, F.; Zhu, Z. Resource Allocation for Network Slicing in 5G Telecommunication Networks: A Survey of Principles and Models. IEEE Netw. 2019, 33, 172–179. [Google Scholar] [CrossRef]
- Debbabi, F.; Jmal, R.; Fourati, L.C.; Ksentini, A. Algorithmics and Modeling Aspects of Network Slicing in 5G and Beyonds Network: Survey. IEEE Access 2020, 8, 162748–162762. [Google Scholar] [CrossRef]
- Wang, X.; Mao, S.; Gong, M.X. An Overview of 3GPP Cellular Vehicle-To-Everything Standards. GetMobile: Mob. Comput. Commun. 2017, 21, 19–25. [Google Scholar] [CrossRef]
- Mohammed, M.H.; Agrawal, D.; Dixit, P.; Bhattacharyya, B. Deep Learning for Network Slicing and Self-Healing in 5G Systems. In Proceedings of the 2021 IEEE International Conference on Signal Processing, Information, Communication & Systems (SPICSCON), Dhaka, Banglades, 3–4 December 2021. [Google Scholar]
- Liu, Q.; Choi, N.; Han, T. Deep Reinforcement Learning for End-To-End Network Slicing: Challenges and Solutions. IEEE Netw. 2022, 37, 222–228. [Google Scholar] [CrossRef]
- Sarra, B.; Saleh, M.; Saad, H. Ensuring QoS and Efficiency of Vehicular Networks by SDVN-IoV. In Proceedings of the 2020 International Conference on Advanced Aspects of Software Engineering (ICAASE), Constantine, Algeria, 28–30 November 2022. [Google Scholar]
- Wu, Q.; Shi, S.; Wan, Z.; Fan, Q.; Fan, P.; Zhang, C. Towards V2I Age-Aware Fairness Access: A DQN Based Intelligent Vehicular Node Training and Test Method. Chin. J. Electron. 2023, 32, 1230–1244. [Google Scholar]
- Wu, Z.; Lu, Z.; Hung, P.C.K.; Huang, S.-C.; Tong, Y.; Wang, Z. QaMeC: A QoS-Driven IoVs Application Optimizing Deployment Scheme in Multimedia Edge Clouds. Future Gener. Comput. Syst. 2019, 92, 17–28. [Google Scholar] [CrossRef]
- Aldhyani, T.H.H.; Alrasheedi, M.; Alqarni, A.A.; Alzahrani, M.Y.; Bamhdi, A.M. Intelligent Hybrid Model to Enhance Time Series Models for Predicting Network Traffic. IEEE Access 2020, 8, 130431–130451. [Google Scholar] [CrossRef]
- Hu, Y.; Zhu, L.; Zhang, J.; Cai, Z.; Han, J. Migration and Energy Aware Network Traffic Prediction Method Based on LSTM in NFV Environment. KSII Trans. Internet Inf. Syst. 2023, 17, 896–915. [Google Scholar]
- Tam, P.; Kang, S.; Ros, S.; Kim, S. Enhancing QoS with LSTM-Based Prediction for Congestion-Aware Aggregation Scheduling in Edge Federated Learning. Electronics 2023, 12, 3615. [Google Scholar] [CrossRef]
- Park, J.; Son, J.G.; Kim, D. Resource Metric Refining Module for AIOps Learning Data in Kubernetes Microservice. KSII Trans. Internet Inf. Syst. 2023, 17, 1545–1559. [Google Scholar]
- Song, I.; Tam, P.; Kang, S.; Ros, S.; Kim, S. DRL-Based Backbone SDN Control Methods in UAV-Assisted Networks for Computational Resource Efficiency. Electronics 2023, 12, 2984. [Google Scholar] [CrossRef]
- ONF White Paper; Software-Defined Networking: The New Norm for Networks; Open Networking Foundation: Palo Alto, CA, USA, 2012.
- ETSI GS NFV-INF 001; Network Functions Virtualisation (NFV); Infrastructure Overview. ETSI: Sophia Antipolis, France, 2015.
- Sabella, D.; Vaillant, A.; Kuure, P.; Rauschenbach, U.; Giust, F. Mobile-Edge Computing Architecture: The Role of MEC in the Internet of Things. IEEE Consum. Electron. Mag. 2016, 5, 84–91. [Google Scholar] [CrossRef]
- Chowdhury, N.M.M.K.; Boutaba, R. A Survey of Network Virtualization. Comput. Netw. 2010, 54, 862–876. [Google Scholar] [CrossRef]
- Ren, Y.; Guo, A.; Song, C. Multi-Slice Joint Task Offloading and Resource Allocation Scheme for Massive MIMO Enabled Network. KSII Trans. Internet Inf. Syst. 2023, 17, 794–815. [Google Scholar]
- Song, I. A Study on 5G Service Methods by Using BOCR Model and ANP. KSII Trans. Internet Inf. Syst. 2022, 16, 3299–3312. [Google Scholar]
- Li, X.; Rao, J.; Zhang, H.; Callard, A. Network Slicing with Elastic SFC. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Ros, S.; Eang, C.; Tam, P.; Kim, S. ML/SDN-Based MEC Resource Management for QoS Assurances. In Proceedings of the Advances in Computer Science and Ubiquitous Computing (CUTECSA 2022), Vientiane, Laos, 19–21 December 2022; Park, J.S., Yang, L.T., Pan, Y., Park, J.H., Eds.; Lecture Notes in Electrical Engineering. Springer: Singapore, 2023; Volume 1028. [Google Scholar]
- ETSI GS NFV-EVE 005; Network Function Virtualisation (NFV); Ecosystem; Report on SDN Usage in NFV Architectural Framework. ETSI: Sophia Antipolis, France, 2015.
- Wu, W.; Zhou, C.; Li, M.; Wu, H.; Zhou, H.; Zhang, N.; Shen, X.S.; Zhuang, W. AI-Native Network Slicing for 6G Networks. IEEE Wirel. Commun. 2022, 29, 96–103. [Google Scholar] [CrossRef]
- Togou, M.A.; Bi, T.; Dev, K.; McDonnell, K.; Milenovic, A.; Tewari, H.; Muntean, G.-M. DBNS: A Distributed Blockchain-Enabled Network Slicing Framework for 5G Networks. IEEE Commun. Mag. 2020, 58, 90–96. [Google Scholar] [CrossRef]
- Messaoud, S.; Bradai, A.; Ben Ahmed, O.; Quang, P.; Atri, M.; Hossain, M.S. Deep Federated Q-Learning-Based Network Slicing for Industrial IoT. IEEE Trans. Ind. Inform. 2020, 17, 1. [Google Scholar] [CrossRef]
- Li, M.; Gao, J.; Zhou, C.; Shen, X.S.; Zhuang, W. Slicing-Based Artificial Intelligence Service Provisioning on the Network Edge: Balancing AI Service Performance and Resource Consumption of Data Management. IEEE Veh. Technol. Mag. 2021, 16, 16–26. [Google Scholar] [CrossRef]
- Zhou, W.; Islam, A.; Chang, K. Real-Time RL-Based 5G Network Slicing Design and Traffic Model Distribution: Implementation for V2X and EMBB Services. KSII Trans. Internet Inf. Syst. 2023, 17, 2573–2589. [Google Scholar]
- Phyu, H.; Naboulsi, D.; Stanica, R. Machine Learning in Network Slicing–A Survey. IEEE Access 2023, 11, 39123–39153. [Google Scholar] [CrossRef]
- Liang, T.; Chen, M.; Yin, Y.; Zhou, L.; Ying, H. Recurrent Neural Network Based Collaborative Filtering for QoS Prediction in IoV. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2400–2410. [Google Scholar] [CrossRef]
- Tam, P.; Song, I.; Kang, S.; Ros, S.; Kim, S. Graph Neural Networks for Intelligent Modelling in Network Management and Orchestration: A Survey on Communications. Electronics 2022, 11, 3371. [Google Scholar] [CrossRef]
- Hurtado Sánchez, J.A.; Casilimas, K.; Caicedo Rendon, O.M. Deep Reinforcement Learning for Resource Management on Network Slicing: A Survey. Sensors 2022, 22, 3031. [Google Scholar] [CrossRef]
- Cui, Y.; He, S.; Wang, R.; He, P.; Wang, D.; Huang, X. Multi-Agent Reinforcement Learning for Slicing Resource Allocation in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Kamal, M.A.; Raza, H.W.; Alam, M.M.; Su’ud, M.M.; Sajak, A. binti A.B. Resource Allocation Schemes for 5G Network: A Systematic Review. Sensors 2021, 21, 6588. [Google Scholar] [CrossRef] [PubMed]
- Pratik, T.; Anurag, T.; Kulkarni, A. GREENSKY: A Fair Energy-Aware Optimization Model for UAVs in Next-Generation Wireless Networks. Green Energy Intell. Transp. 2023, 3, 100130. [Google Scholar]
- Shen, H.; Wang, T.; Heng, Y.; Bai, G. Joint Resource Slicing and Vehicle Association for Drone-Assisted Vehicular Networks. Drones 2023, 7, 534. [Google Scholar] [CrossRef]
- Mlika, Z.; Cherkaoui, S. Network Slicing with MEC and Deep Reinforcement Learning for the Internet of Vehicles. IEEE Netw. 2021, 35, 132–138. [Google Scholar] [CrossRef]
- Wu, Y.; Dai, H.-N.; Wang, H.; Xiong, Z.; Guo, S. A Survey of Intelligent Network Slicing Management for Industrial IoT: Integrated Approaches for Smart Transportation, Smart Energy, and Smart Factory. IEEE Commun. Surv. Tutor. 2022, 24, 1175–1211. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, G.; Ren, C. Network Slicing for IoV: QoS-Oriented Radio Resource Optimization. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 16–26 October 2022. [Google Scholar]
- Khan, H.; Luoto, P.; Samarakoon, S.; Bennis, M.; Matti, L. Network Slicing for Vehicular Communication. Trans. Emerg. Telecommun. Technol. 2021, 32, e3652. [Google Scholar] [CrossRef]
- Smida, K.; Tounsi, H.; Frikha, M.; Song, Y.-Q. FENS: Fog-Enabled Network Slicing in SDN/NFV-Based IoV. Wirel. Pers. Commun. 2022, 128, 2175–2202. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Description | Acronym | Description |
|---|---|---|---|
| DQN | Deep Q-networks | QoS | Quality of service |
| DNN | Deep neural networks | RNN | Recurrent neural networks |
| DRL | Deep reinforcement learning | SDN | Software-defined networking |
| E2E | End-to-end | SBS | Small base stations |
| EPC | Evolved packet core | SLAs | Service-level agreements |
| IoV | Internet of Vehicles | TD | Temporal difference |
| ITS | Intelligent transport systems | V2I | Vehicle-to-infrastructure |
| LSTM | Long short-term memory | V2N | Vehicle-to-network |
| MBS | Macro base stations | V2P | Vehicle-to-pedestrian |
| MANO | Management and orchestration | V2V | Vehicle-to-vehicle |
| MEC | Multi-access edge computing | V2X | Vehicle-to-everything |
| NFV | Network functions virtualization | VNFs | Virtual network functions |
| NS | Network slicing | VNFM | VNFs manager |
| Slice Instances | Latency | Data Rate | Scalability (Per Vehicle) | Ref. |
| Autonomous vehicles | 1 ms | 10 Mb/s | 50–200 | [5] |
| Tele-operated vehicles | 20 ms | 1Mb/s or 25 Mb/s | 50–100 | |
| Remote diagnostic | Not a concern | Not a concern | 10–20 | |
| Vehicle infotainment system | 100 ms | 0.5–15 Mb/s | 5–15 | |
| Slice Instances | Latency | Data Rate | Reliability | Ref. |
| Localization and navigation | 10–100 ms | 1 Mb/s | Low to high | [43] |
| Driving/transportation safety | 50–100 ms | 1 Mb/s | 99.9% | |
| Autonomous driving | 1 ms | 10 Mb/s | Close to 100% | |
| Infotainment services | Up to 100 ms | 15 Mb/s | Fair |
| Slice Instances | Max. Delay | Data Rate | Scalability (Per Vehicle) | Reliability |
|---|---|---|---|---|
| Safety-critical | 1–20 ms | 1–10 Mb/s | 50–200 | High |
| ITS-supported | 1–50 ms | 1–10 Mb/s | 50–100 | Low–High |
| On-board infotainment | Up to 100 ms | 0.5–15 Mb/s | 5–15 | Low |
| Purpose | Specification |
|---|---|
| RNN and DQN hosts | Python (PyTorch, Gymnasium) |
| SDN and NFV core hosts | Mininet |
| SDN controller | RYU |
| Interfaces between RDQ3N and controller hosts | RESTful APIs |
| Hidden size | 256 |
| RNN number of layers | 2 |
| RNN input size | 10 |
| RNN dropout | 0.2 |
| Learning rate | 0.001 |
| Discount factor | 0.99 |
| Exploration rate | 0.9 (exponential decay: 1000) |
| Minimum epsilon | 0.05 |
| Replay buffer size | 1,000,000 |
| Batch size | 128 |
| Target DNN update frequency | 1000 steps |
| Target DNN update rate | 0.005 |
| Initial exploration steps | 5000 |
| Action space | 3 |
| State space | 12 |
| RNN training steps | 10,000 |
| DQN training steps | 100,000 |
| Mininet (service flow creation) times | 10 h (5 h for training, 5 h for validation) |
| Action functions | ReLU, Sigmoid, Tanh |
| Number of slice instances | 3 |
| Number of vehicle nodes | 120 |
| Tier-1 and tier-2 nodes | (10), (2) |
| Service requests per second | 1000 |
| Condition | RS-GA | PS-WFG | MA-SM | RDQ3N-SM |
|---|---|---|---|---|
| Slice 1 | 99.56% | 99.92% | 99.89% | 100.00% |
| Slice 2 | 99.45% | 99.59% | 99.81% | 99.95% |
| Slice 3 | 98.23% | 97.63% | 99.79% | 99.91% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tam, P.; Ros, S.; Song, I.; Kim, S. QoS-Driven Slicing Management for Vehicular Communications. Electronics 2024, 13, 314. https://doi.org/10.3390/electronics13020314
Tam P, Ros S, Song I, Kim S. QoS-Driven Slicing Management for Vehicular Communications. Electronics. 2024; 13(2):314. https://doi.org/10.3390/electronics13020314
Chicago/Turabian StyleTam, Prohim, Seyha Ros, Inseok Song, and Seokhoon Kim. 2024. "QoS-Driven Slicing Management for Vehicular Communications" Electronics 13, no. 2: 314. https://doi.org/10.3390/electronics13020314
APA StyleTam, P., Ros, S., Song, I., & Kim, S. (2024). QoS-Driven Slicing Management for Vehicular Communications. Electronics, 13(2), 314. https://doi.org/10.3390/electronics13020314