
Adaptive Weighted Particle Swarm Optimization for Controlling Multiple Switched Reluctance Motors with Enhanced Deviatoric Coupling Control


 , , and
, , and
Abstract
:1. Introduction
- (1)
- Recent advances in SRM control systems and multi-motor synchronization strategies are reviewed.
- (2)
- The paper analyzes the basic equations of SRM, thus constituting the mathematical model of SRM, and neglect some of its nonlinear factors, solve the linear model of the motor, and design the corresponding control strategy for the model.
- (3)
- While aiming at the shortcomings of the traditional deviant coupling, certain improvements are made, and the process of realizing the idea of its improvement is discussed.
- (4)
- The principle of the PSO algorithm with adaptive weights is explained, and the cumulative sum expression of the absolute value of the synchronization error is used as the fitness function.
- (5)
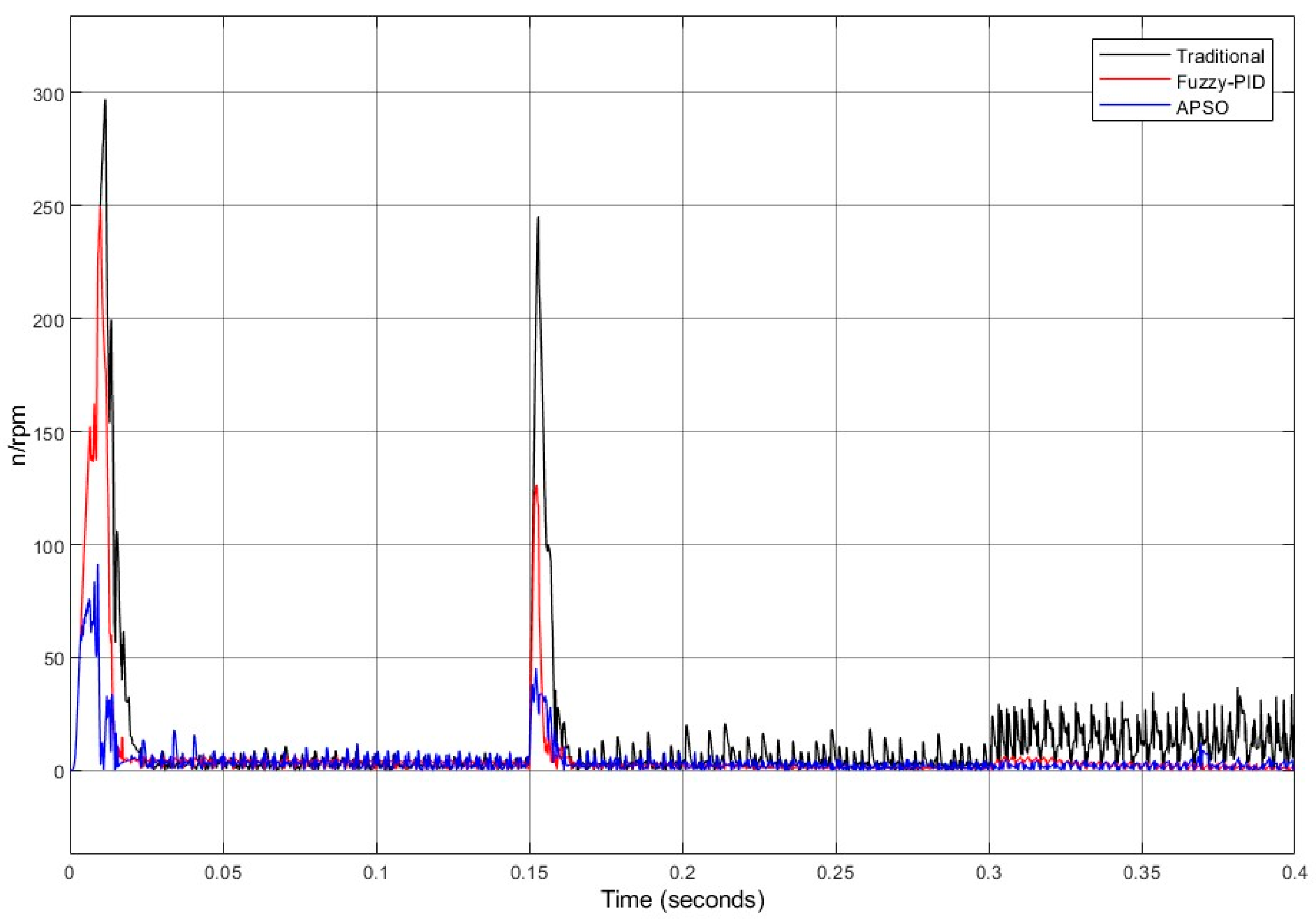
- A multi-motor synchronous control simulation model is constructed to compare the synchronous performance of the traditional deviation-coupled structure, the fuzzy PID-based improved structure, and the improved structure in this paper, which proves the superiority of the synchronous control of multi-SRMs.
- (6)
- The research work in this paper is summarized, and the next steps in the research program are envisioned.
2. Switched Reluctance Motors
2.1. Working Principle
2.2. Mathematical Model
2.2.1. Circuit Equation
2.2.2. Mechanical Equation
2.2.3. Electromechanical Linkage Equation
2.2.4. Linear Model
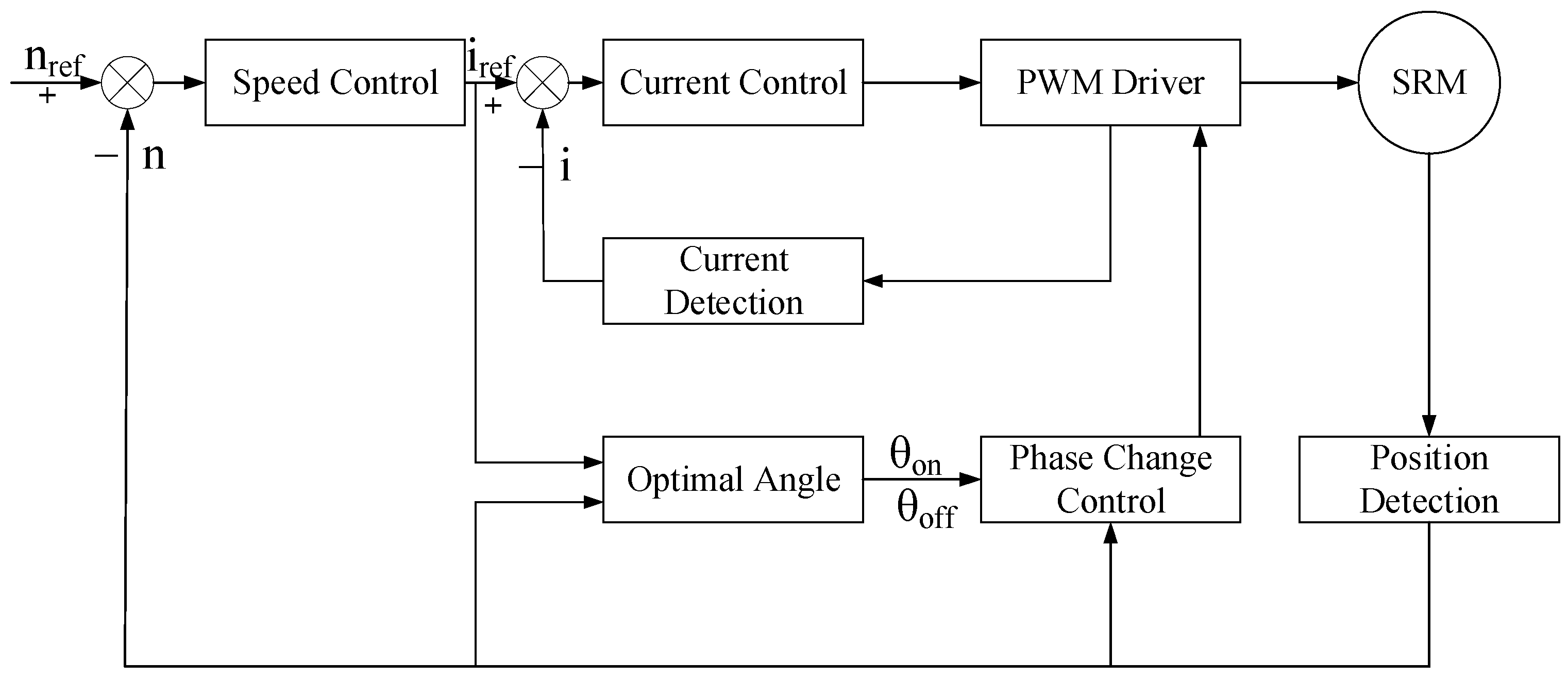
2.3. Control Strategies for SRM
3. Improved Deviation Coupling Structure
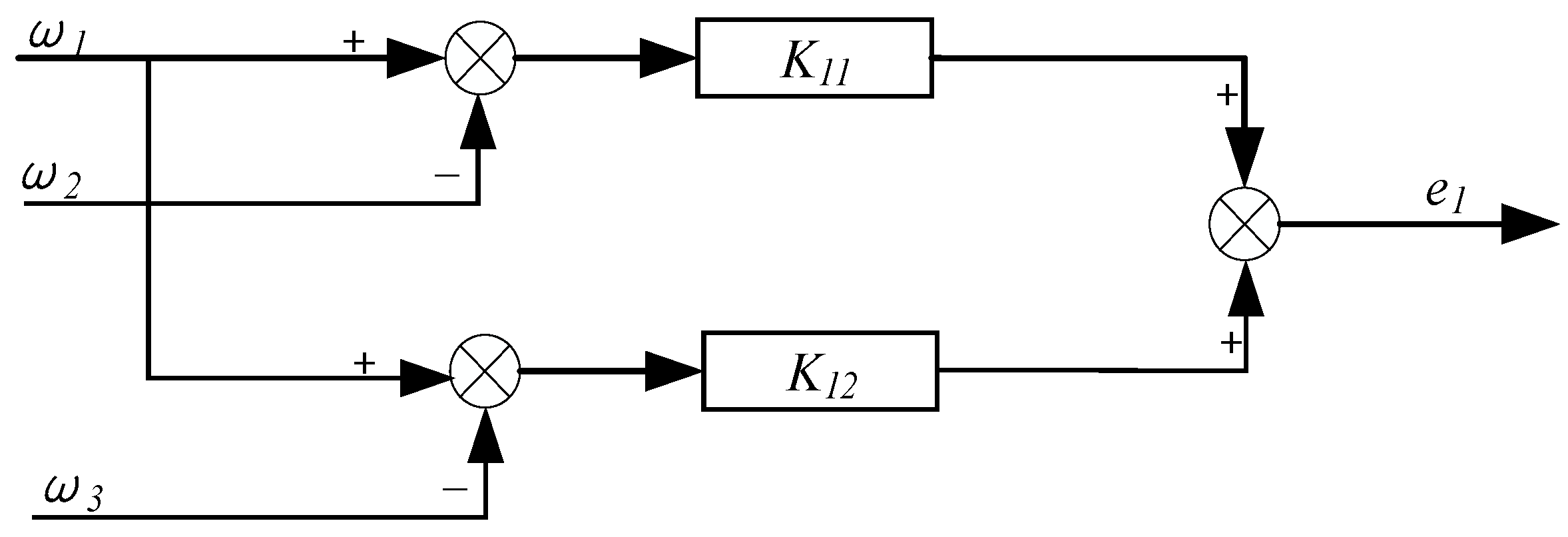
3.1. Deviation Coupling Structures
3.2. Improved Speed Compensator
4. Adaptive Particle Swarm Optimization Algorithm
4.1. Standard Particle Swarm Optimization Algorithm
4.2. Particle Swarm Algorithm with Adaptive Weights
4.3. Synchronization Error Compensation Optimized by Adaptive Weighted PSO
5. Simulation Results
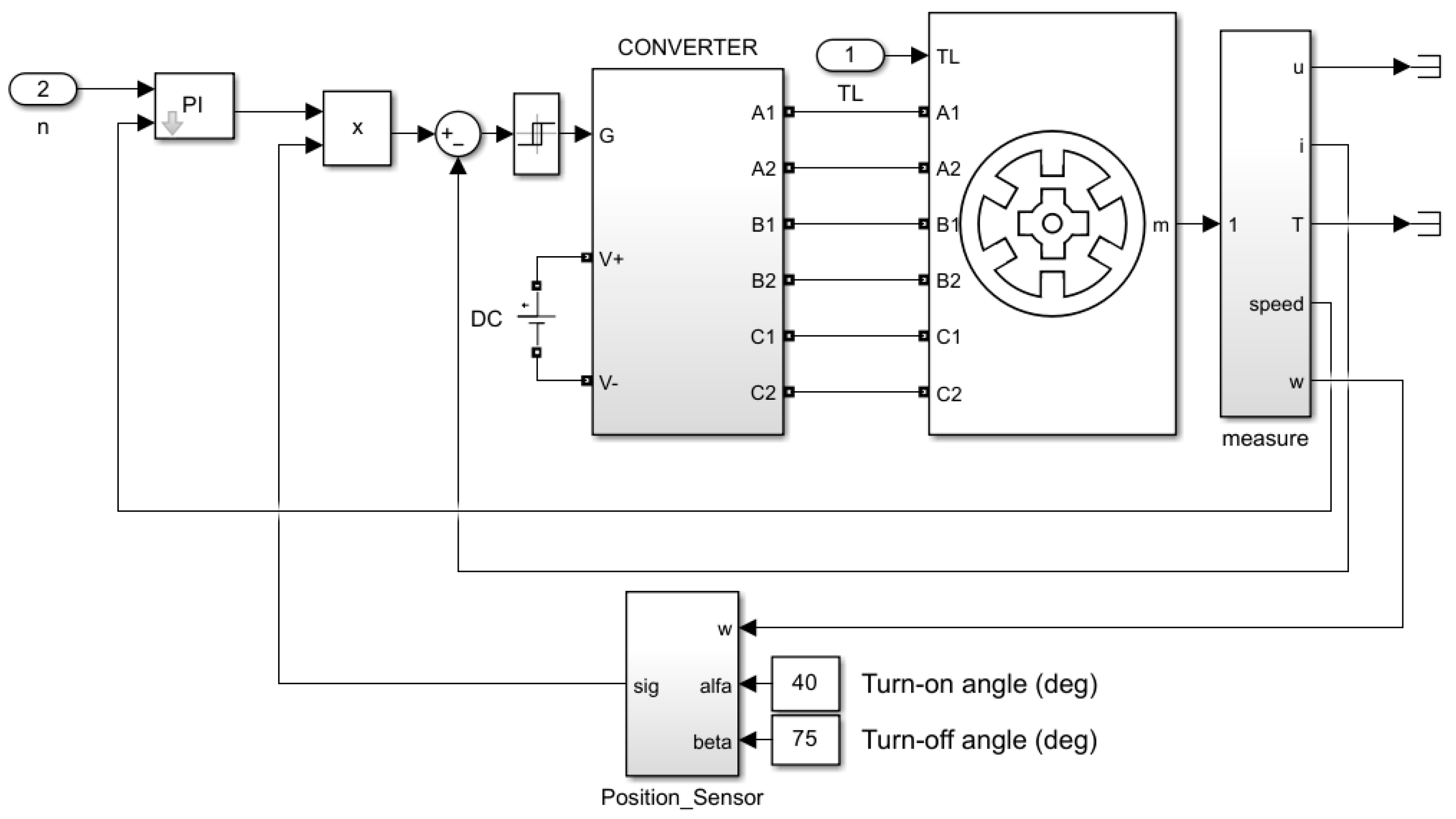
5.1. Simulation Model
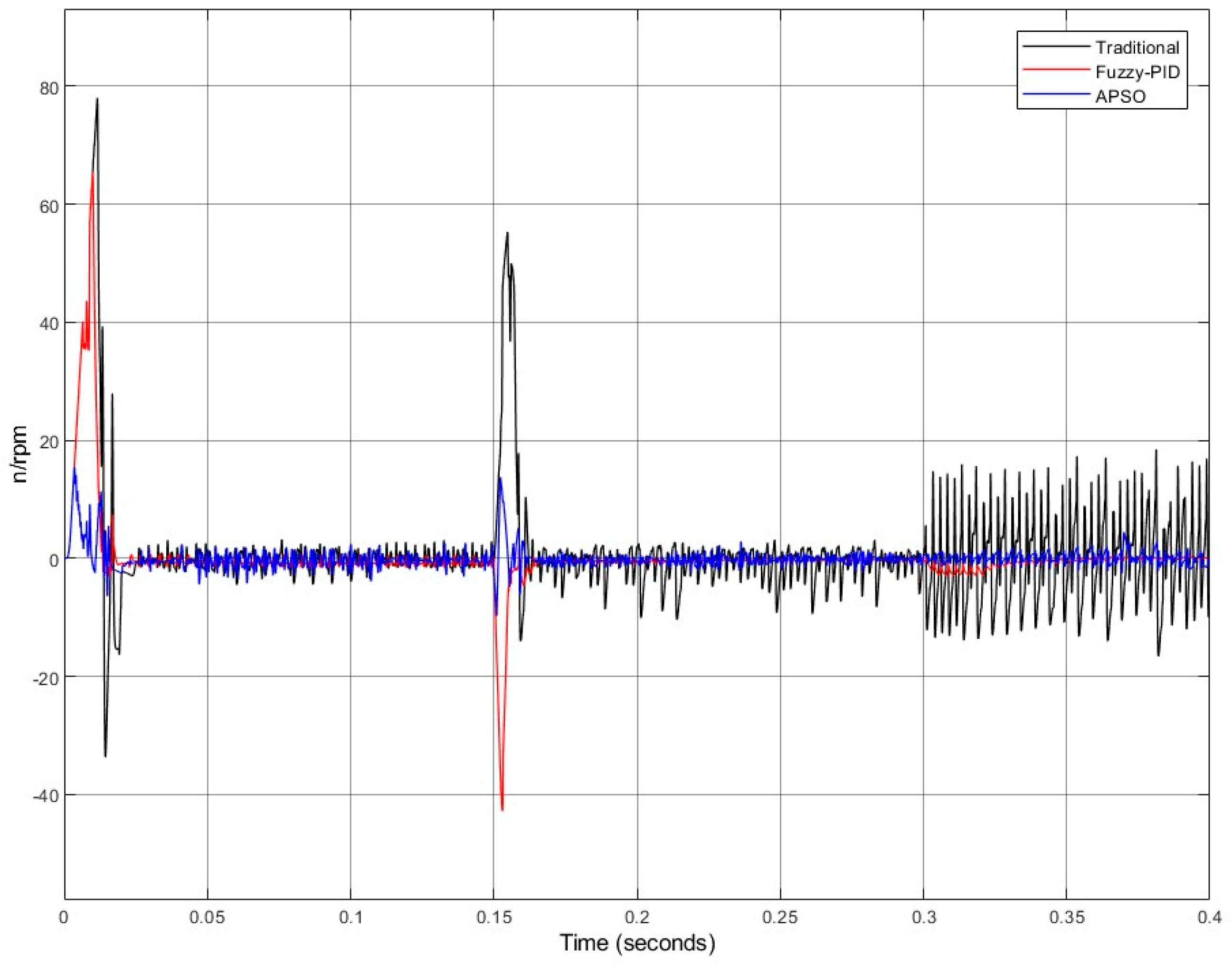
5.2. Analysis of Results
6. Conclusions and Outlook
6.1. Conclusions
6.2. Outlook
- The paper primarily addresses speed synchronization in multi-SRM systems. However, in practical applications, synchronization systems must also account for torque and power synchronization. These aspects are crucial for enhancing the overall performance and efficiency of multi-motor systems. Future research should focus on incorporating strategies for torque and power synchronization to further optimize system performance and meet the complex demands of industrial applications.
- This study is limited to simulation analysis, and the experimental component, including hardware and software design, has not yet been conducted. Future work will focus on completing these aspects to validate the simulation results and further enhance the practical applicability of the proposed system.
- The linear mathematical model of the SRM used in this paper involves several approximations, with some secondary factors being neglected. While these approximations do not significantly affect the simulation results, they are subject to certain limitations. In applications requiring higher control precision, these approximations may need further refinement to improve the model’s accuracy and reliability. Future work should focus on enhancing the model to better suit high-precision control scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saleh, A.L.; Számel, L. Improved Direct Instantaneous Torque Control Strategy of Switched Reluctance Motor based on Artificial Neural Network. In Proceedings of the 2024 6th Global Power, Energy and Communication Conference (GPECOM), Budapest, Hungary, 4–7 June 2024; pp. 166–172. [Google Scholar] [CrossRef]
- Al Quraan, L.; Saleh, A.L.; Szamel, L. Indirect Instantaneous Torque Control for Switched Reluctance Motor Based on Improved Torque Sharing Function. IEEE Access 2024, 12, 11810–11821. [Google Scholar] [CrossRef]
- Lin, H.; Zhao, F.; Kwon, B.-I. Analysis and Control of the Permanent Magnet Synchronous Motor with Auxiliary Modular Design. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar] [CrossRef]
- Wang, H.; Sun, W.; Jiang, D.; Qu, R. A MTPA and Flux-Weakening Curve Identification Method Based on Physics-Informed Network Without Calibration. IEEE Trans. Power Electron. 2023, 38, 12370–12375. [Google Scholar] [CrossRef]
- Kuznetsov, B.I.; Nikitina, T.B.; Bovdui, I.V. Structural-Parametric Synthesis of Rolling Mills Multi-Motor Electric Drives. Electr. Eng. Electromech. 2020, 25–30. [Google Scholar] [CrossRef]
- Niu, F.; Sun, K.; Huang, S.; Hu, Y.; Liang, D.; Fang, Y. A Review on Multimotor Synchronous Control Methods. IEEE Trans. Transp. Electrification 2022, 9, 22–33. [Google Scholar] [CrossRef]
- Xu, Y.; Cheng, Z.; Tang, W. Design of Multi-motor Synchronous Control System. In Proceedings of the 2021 3rd Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 26–29 March 2021; pp. 846–851. [Google Scholar] [CrossRef]
- Nimisha, K.; Senthilkumar, R. Optimal Tuning of PID Controller for Switched Reluctance Motor Speed Control Using Particle Swarm Optimization. In Proceedings of the 2018 International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT), Kannur, India, 23–24 March 2018; pp. 487–491. [Google Scholar] [CrossRef]
- Monish, M.; Kumar, H. A Multi-Objective Particle Swarm Optimization based Current Control and Torque Control for 8/6 Switched Reluctance Motor. In Proceedings of the 2023 International Conference on Control, Communication and Computing (ICCC), Thiruvananthapuram, India, 19–21 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, Z.; Zhang, G.; Huang, Y. Research on Fuzzy Control of Switched Reluctance Motor. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 189–192. [Google Scholar] [CrossRef]
- Xun, T.; Zhang, H. Research on Intelligent Speed Regulation System of Switched Reluctance Motor Based on Fuzzy Control. In Proceedings of the 2022 7th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 15–17 April 2022; pp. 991–996. [Google Scholar] [CrossRef]
- Yuliang, W.; Chaozhi, H.; Wensheng, C.; Lixiang, D. Segmental PWM Variable Duty Cycle Control of Switched Reluctance Motor Based on Current Chopping. In Proceedings of the 2022 IEEE 5th International Electrical and Energy Conference (CIEEC), Nanjing, China, 27–29 May 2022; pp. 417–422. [Google Scholar] [CrossRef]
- Štil, V.J.; Varga, T.; Benšić, T.; Barukčić, M. A Survey of Fuzzy Algorithms Used in Multi-Motor Systems Control. Electronics 2020, 9, 1788. [Google Scholar] [CrossRef]
- Shen, C.; Yang, H. A New Three-Motor Drive System Using Fuzzy Active Disturbance Rejection Control. Autom. Control Comput. Sci. 2020, 54, 207–215. [Google Scholar] [CrossRef]
- Chen, H. The parallel drive system of the double switched reluctance motors based on fuzzy logic. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 5, pp. 3306–3310. [Google Scholar] [CrossRef]
- Wang, B.; Lu, H.; Liu, Q.; Wang, S.; Pan, H.; Dai, J. Research on Synchronous Control Strategy of Dual-Drive Feed System Based on Fuzzy PID Control. In Proceedings of the ASME 2022 17th International Manufacturing Science and Engineering Conference, West Lafayette, IN, USA, 27 June–1 July 2022; American Society of Mechanical Engineers: New York, NY, USA, 2022; p. 85802. [Google Scholar] [CrossRef]
- Shi, P.; Sun, W.; Yang, X.; Rudas, I.J.; Gao, H. Master-Slave Synchronous Control of Dual-Drive Gantry Stage with Cogging Force Compensation. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 53, 216–225. [Google Scholar] [CrossRef]
- Inagaki, T.; Suzuki, K.; Dohmeki, H. The study of parallel synchronous drive in Permanent magnet linear synchronous motor. In Proceedings of the 2017 11th International Symposium on Linear Drives for Industry Applications (LDIA), Osaka, Japan, 6–8 September 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Koren, Y. Cross-Coupled Biaxial Computer Control for Manufacturing Systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Song, H.; Song, Q.; Wei, W. Position Synchronization Control of Adjacent Cross-Coupled Linear Switched Reluctance Motor. Chin. J. Electr. Eng. 2017, 37, 7024–7031. [Google Scholar] [CrossRef]
- Han, G.; Lu, Z.; Hong, J.; Wu, M.; Xu, S.; Zhu, B. Speed Synchronization Control of Dual-SRM Drive with ISMC-Based Cross-Coupling Control Strategy. IEEE Trans. Transp. Electrif. 2022, 9, 2524–2534. [Google Scholar] [CrossRef]
- Geng, Q.; Wang, S.; Zhou, Z.; Shi, T.; Xia, C. Multi-motor speed synchronous control based on improved relative coupling struc-ture. Trans. China Electrotech. Soc. 2019, 34, 474–482. [Google Scholar] [CrossRef]
- Cheng, W.Y.; Luo, L.; Liu, Z.G. Improvement study of deviation coupling compensation backstepping synchronous control arithmetic. Mach. Des. Manuf. 2016, 2, 41–44. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, D.; Zhuang, H.; Lu, B. Coordinated synchronization control of multi-motor system based on synergetic control theory. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 160–164. [Google Scholar] [CrossRef]
- Su, S.; Yue, Y.; Liu, D. Multi-Motor Synchronous Control Based on Improved Deviation Coupling. Modul. Mach. Tool Autom. Manuf. Tech. 2023, 102–105+111. [Google Scholar] [CrossRef]
- Rahayu, E.S.; Ma’Arif, A.; Çakan, A. Particle Swarm Optimization (PSO) Tuning of PID Control on DC Motor. Int. J. Robot. Control. Syst. 2022, 2, 435–447. [Google Scholar] [CrossRef]
- Qiao, D.; Mu, N.; Liao, X.; Le, J.; Yang, F. Improved evolutionary algorithm and its application in PID controller optimization. Sci. China Inf. Sci. 2020, 63, 199205. [Google Scholar] [CrossRef]
- Ren, X.; Yang, Y.; Gao, L.; Chen, J.; Mei, T.; Yu, J.; Han, Q. Research on Robot Tracking of Books Returning to Bookshelf Based on Particle Swarm Optimization Fuzzy PID Control. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 2507–2511. [Google Scholar] [CrossRef]
- Mustafa, M.O. Optimal parameter values of PID controller for DC motor based on modified particle swarm optimization with adaptive inertia weight. East. Eur. J. Enterp. Technol. 2021, 1, 35–45. [Google Scholar] [CrossRef]
- Bian, H.; Chen, H.; Wang, R. Modeling and simulation of three-phase 6/4 switched reluctance motor speed control system. J. Phys. Conf. Ser. 2020, 1684, 012139. [Google Scholar] [CrossRef]
- Tchavychalov, M.V.; Grebennikov, N.V.; Trinz, D.V. SRM Simulation with Reduced Amount of Initial Information. In Proceedings of the 2020 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 18–22 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yankov, D.K.; Grigorova, T.G.; Dinkov, E.I. Modeling of a Tree-Phase 12/8 Pole Switched Reluctance Motor in MATLAB. In Proceedings of the 2019 IEEE XXVIII International Scientific Conference Electronics (ET), Sozopol, Bulgaria, 12–14 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Gao, M.; Yang, X. APSO-SL: An Adaptive Particle Swarm Optimization with State-Based Learning Strategy. Processes 2024, 12, 400. [Google Scholar] [CrossRef]
- Wei, B.; Xia, X.; Yu, F.; Zhang, Y.; Xu, X.; Wu, H.; Gui, L.; He, G. Multiple adaptive strategies based particle swarm optimization algorithm. Swarm Evol. Comput. 2020, 57, 100731. [Google Scholar] [CrossRef]
- Li, Q.; Yang, C.; Li, H.; Zhang, M.; Liu, P.; Cheng, X.; Guo, P. Improved Deviation Coupling Synchronous Control Based on Adaptive Fuzzy PID. In Proceedings of the 2019 IEEE 8th International Conference on Fluid Power and Mechatronics (FPM), Wuhan, China, 10–13 April 2019; pp. 567–574. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | SRM1 | SRM2 | SRM3 |
|---|---|---|---|
| Pole configuration | 6/4 | 6/4 | 6/4 |
| Stator resistance | 0.01 | 0.01 | 0.01 |
| Inertia | 0.008 | 0.0085 | 0.009 |
| Friction | 0.02 | 0.02 | 0.02 |
| Unaligned inductance | 0.67 | 0.67 | 0.67 |
| Aligned Inductance | 23.6 | 23.6 | 23.6 |
| Motor | Sports Event | Overshoot (%) | Stabilization Time (ms) |
|---|---|---|---|
| SRM1 | Traditional | 1.2 | 25.2 |
| Fuzzy PID | 0.6 | 24.1 | |
| APSO | 1.07 | 23.6 | |
| APSO Optimization | 10.83 | 6.35% | |
| SRM2 | Traditional | 2.1 | 25.3 |
| Fuzzy PID | 0.53 | 23.9 | |
| APSO | 0.8 | 23.6 | |
| APSO Optimization | 61.9 | 6.35% | |
| SRM3 | Traditional | 1.3 | 252 |
| Fuzzy PID | 0.46 | 23.4 | |
| APSO | 0.93 | 23.4 | |
| APSO Optimization | 28.2 | 6.35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Xu, X.; Zhang, F.; Gu, Y.; Deng, K.; Xu, Y.; Xie, T.; Song, Y. Adaptive Weighted Particle Swarm Optimization for Controlling Multiple Switched Reluctance Motors with Enhanced Deviatoric Coupling Control. Electronics 2024, 13, 4320. https://doi.org/10.3390/electronics13214320
Zhang T, Xu X, Zhang F, Gu Y, Deng K, Xu Y, Xie T, Song Y. Adaptive Weighted Particle Swarm Optimization for Controlling Multiple Switched Reluctance Motors with Enhanced Deviatoric Coupling Control. Electronics. 2024; 13(21):4320. https://doi.org/10.3390/electronics13214320
Chicago/Turabian StyleZhang, Tianyu, Xianglian Xu, Fangqing Zhang, Yifeng Gu, Kaitian Deng, Yuli Xu, Tunzhen Xie, and Yuanqing Song. 2024. "Adaptive Weighted Particle Swarm Optimization for Controlling Multiple Switched Reluctance Motors with Enhanced Deviatoric Coupling Control" Electronics 13, no. 21: 4320. https://doi.org/10.3390/electronics13214320
APA StyleZhang, T., Xu, X., Zhang, F., Gu, Y., Deng, K., Xu, Y., Xie, T., & Song, Y. (2024). Adaptive Weighted Particle Swarm Optimization for Controlling Multiple Switched Reluctance Motors with Enhanced Deviatoric Coupling Control. Electronics, 13(21), 4320. https://doi.org/10.3390/electronics13214320