
Position–Force Control of a Lower-Limb Rehabilitation Robot Using a Force Feed-Forward and Compensative Gravity Proportional Derivative Method


Abstract
:1. Introduction
2. Mathematical Model
2.1. Robot’s Structure
2.2. Kinematic Model
2.3. Dynamic Model
- is the manipulator inertia matrix,
- is centrifugal and Coriolis matrix,
- is the gravitational vector,
- is the vector of generalized Lagrange coordinates,
- is the vector of generalized forces.
3. Position–Force Control Using Force Feed-Forward and Compensative Gravity Proportional Derivative Method
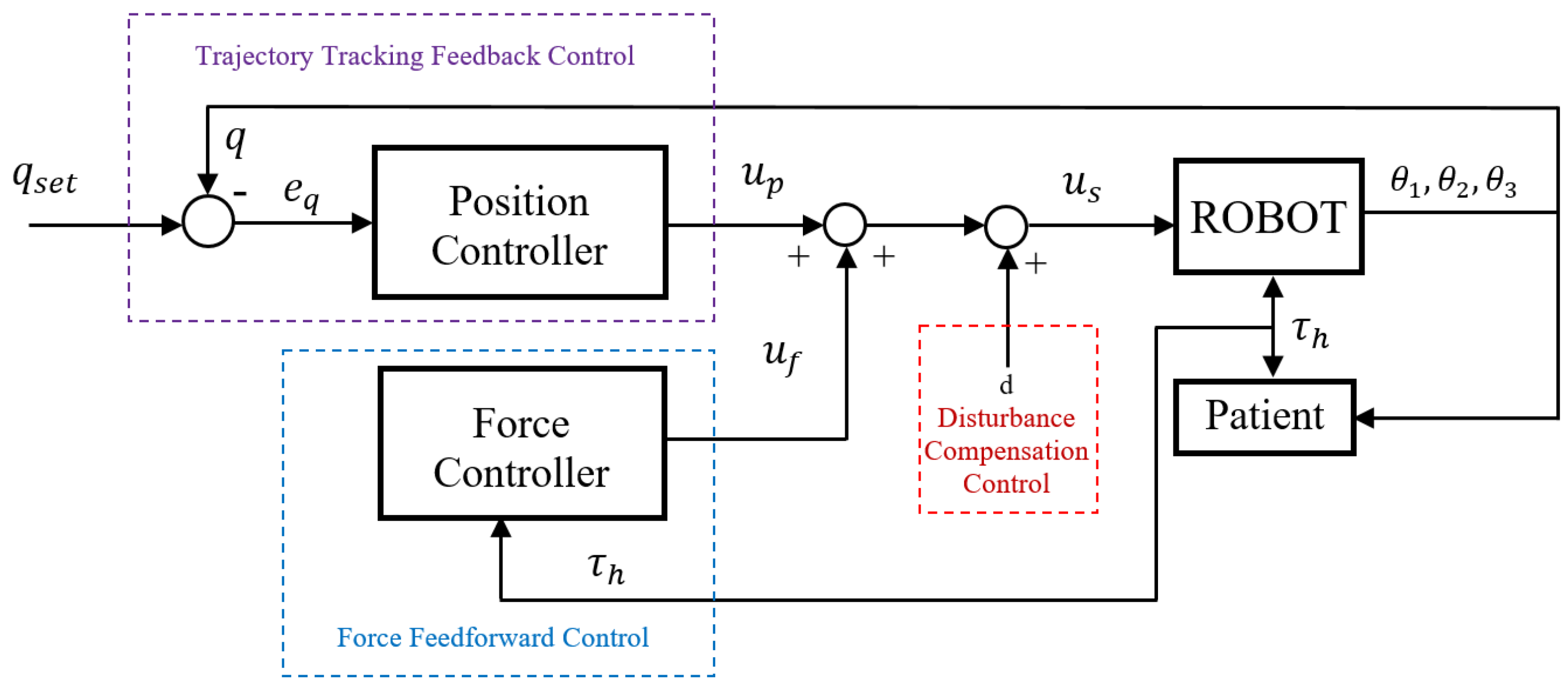
3.1. The Structure Diagram of the Controller
3.2. Control Method
3.2.1. Trajectory Tracking Feedback Control
3.2.2. Force Feed-Forward Control
3.2.3. Disturbance Compensation Method
4. Experimental Results and Discussion
4.1. Experimental Model
4.2. Experimental Scenario
4.3. Choosing Parameters of the Controllers
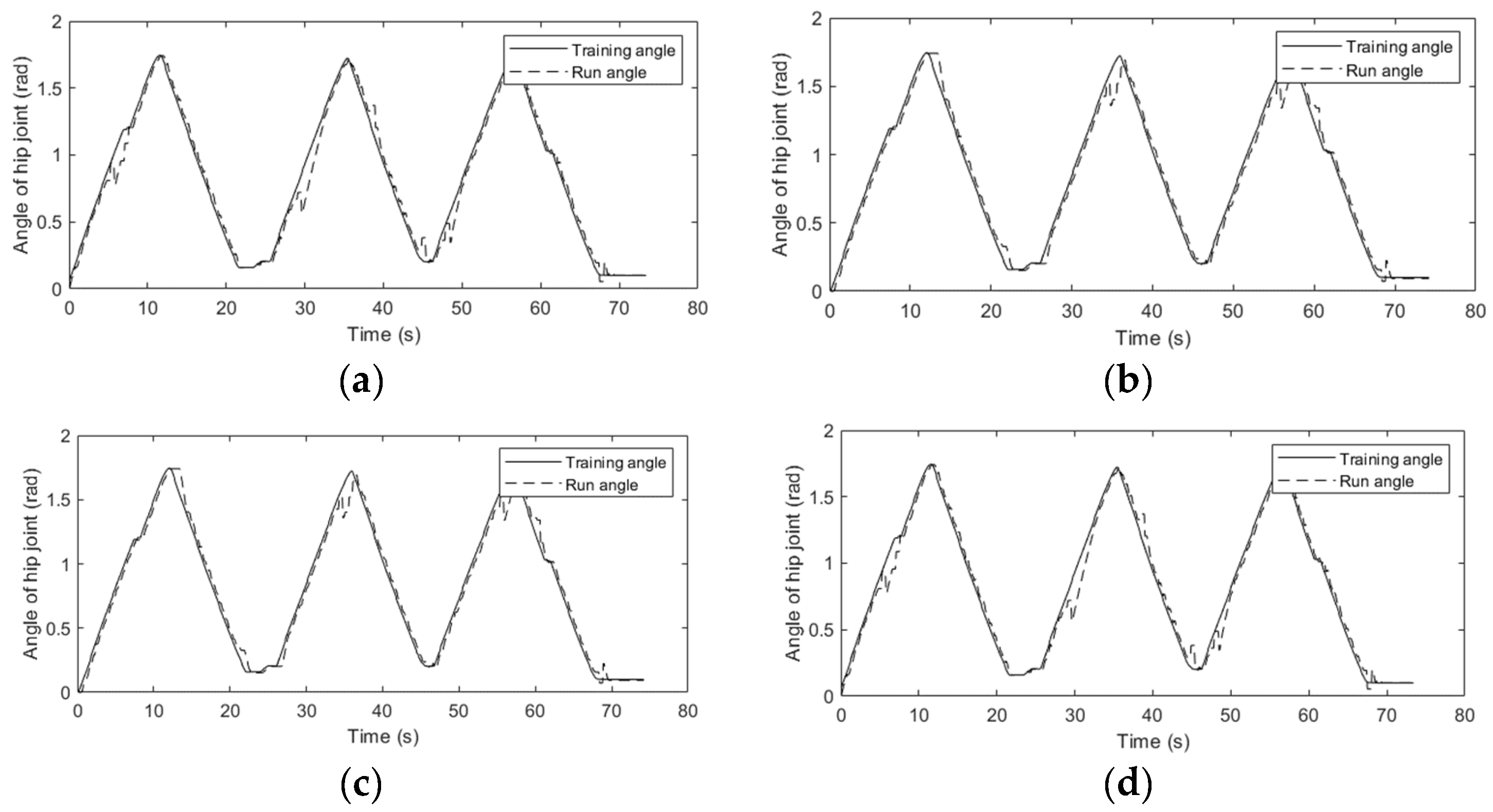
- (a)
- For the position controller: We try different controller parameters and run the systems with different pre-set trajectories, as shown in step 3 above. In each case, we calculate and compare between the pre-set trajectory and measured trajectory. Errors are estimated by using the integral squared error standard ().
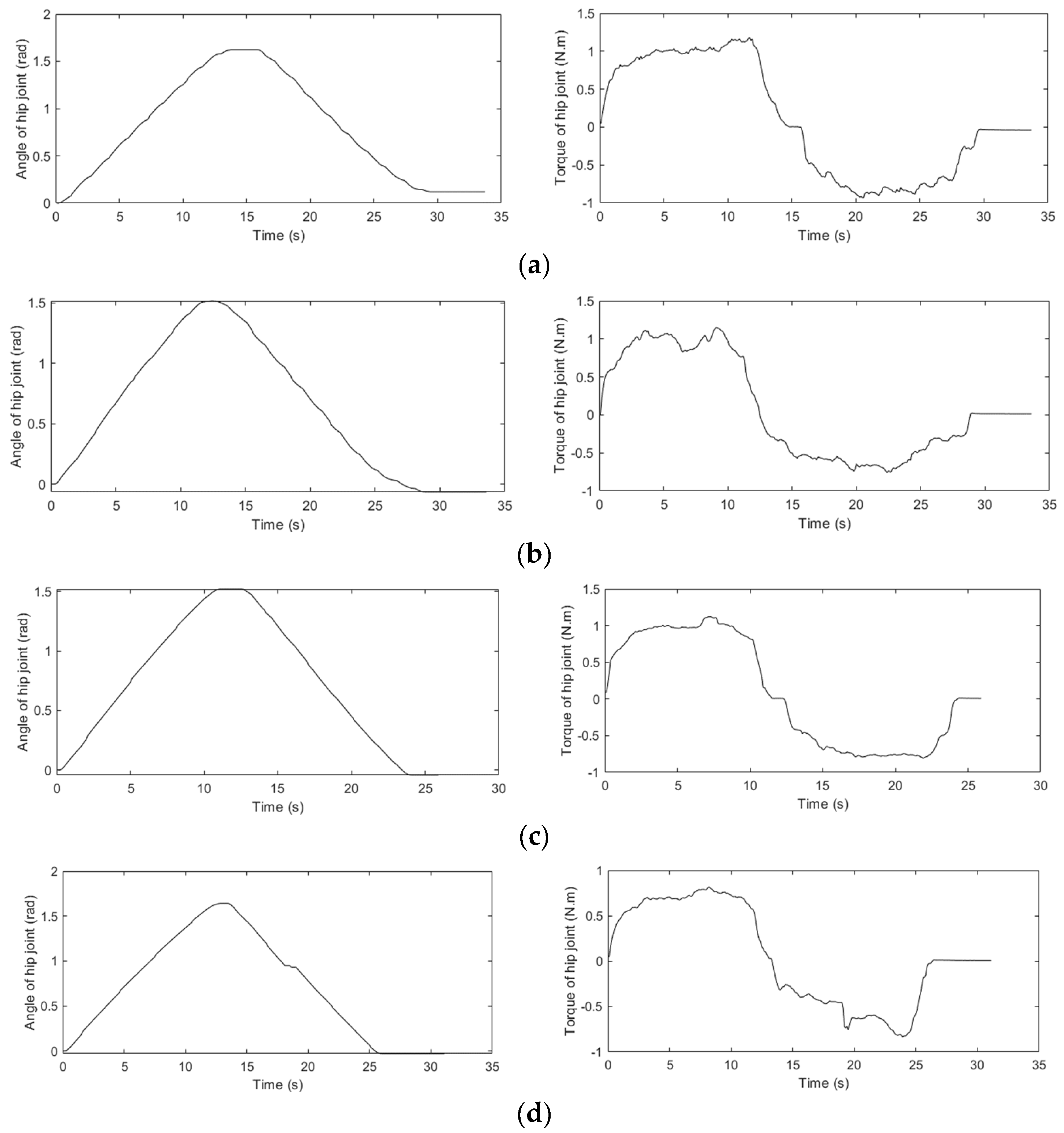
- (b)
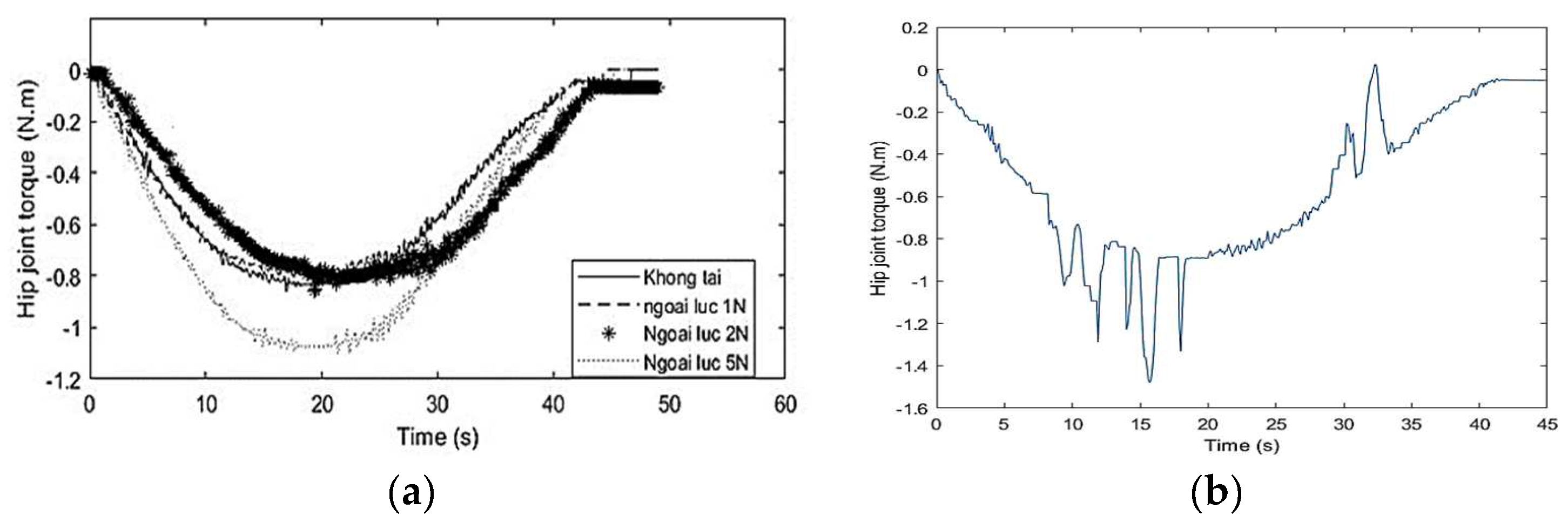
- For the force controller: Similar to the position controller, the force controller’s parameters are determined by experiments. With several experiments, for different and values, it can be seen that changing these parameters within a certain range does not show any major influence on the training trajectory or the force acting on the robot. Therefore, we select and . Next, we carry out experiments by changing . In each test, change and consider the joint trajectory and the maximum force acting on the robot so that the joint can move; then, the appropriate parameters of the controller can be selected. Many experiments with different values of were performed. Table 4 shows the maximum force value acting on the robot, so that the joint can move in a number of tests, and Figure 5 depicts the joint trajectories and corresponding moment graphs.
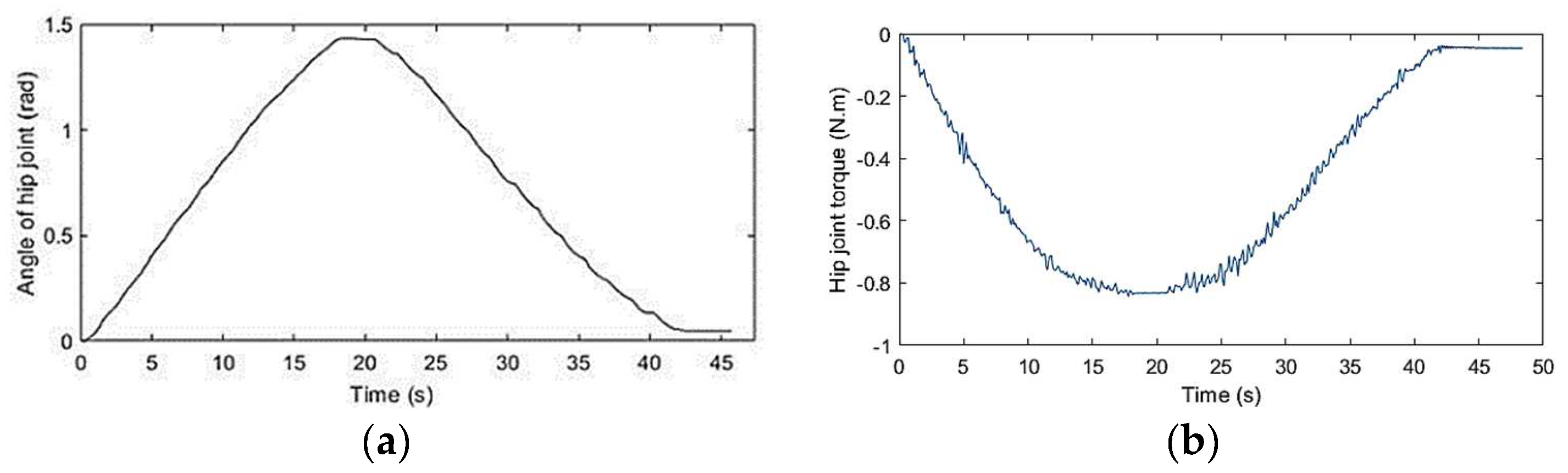
4.4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Williams, G.R.; Jiang, J.G.; Matchar, D.B.; Samsa, G.P. Incidence and occurrence of total (first-ever and recurrent) stroke. Stroke 1999, 30, 2523–2528. [Google Scholar] [CrossRef] [PubMed]
- Mirelman, A.; Bonato, P.; Deutsch, J.E. Effects of training with a robot-virtual reality system compared with a robot alone on the gait of the individual after stroke. Stroke 2009, 40, 169–174. [Google Scholar] [CrossRef] [PubMed]
- Probosz, K.; Wcislo, R.; Otfinowski, J.; Slota, R.; Kitowski, J.; Pisula, M.; Sobczyk, A. A multime-dia holistic rehabilitation method for patients after stroke. Cyber Psychol. Behav. 2009, 12, 646–647. [Google Scholar]
- Hesse, S.; Schmidt, H.; Werner, C.; Bardeleben, A. Upper and lower extremity robotic rehabilitation devices and for studying motor control. Curr. Opin. Neurol. 2003, 16, 705–710. [Google Scholar] [CrossRef] [PubMed]
- Bradley, D.; Acosta-Marquez, C.; Hawley, M.; Brownsell, S.; Enderby, P.; Mawson, S. Nexos-the design, development, and evaluation of a rehabilitation system for the lower limbs. Mechatronics 2009, 19, 247–257. [Google Scholar] [CrossRef]
- Craig, C.; Jonathan, T.; Stephen, R. Development of an exoskeleton haptic interface for virtual task training. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 3697–3702. [Google Scholar]
- Langhorne, P.; Coupar, F.; Pollock, A. Motor recovery after stroke: A systematic review. Lancet Neurol. 2009, 8, 741–754. [Google Scholar] [CrossRef]
- Mayr, A.; Kofler, M.; Quirbach, E.; Matzak, H.; Frohlich, K.; Saltuari, L. Prospective, blinded, randomized cross-over study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehabilit. Neural Repair 2007, 21, 307–314. [Google Scholar] [CrossRef]
- Thielman, G.T.; Dean, C.M.; Gentile, A.M. Rehabilitation of reaching after stroke: Task-related training versus progressive resistive exercise. Arch. Phys. Med. Rehabil. 2004, 85, 1613–1618. [Google Scholar] [CrossRef]
- Riener, R.; Lunenburger, L.; Jezernik, S.; Anderschitz, M.; Colombo, G.; Dietz, V. Patient-cooperative strategies for robot-aided treadmill training: First experimental results. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 380–394. [Google Scholar] [CrossRef]
- Veneman, J.F.; Kruidhof, R.; Hekman EE, G.; Ekkelenkamp, R.; Van Asseldonk, E.H.F.; vander Kooij, H. Design and evaluation of the Lopes exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef]
- Freivogel, S.; Mehrholz, J.; Husak-Sotomayor, T.; Schmalohr, D. Gait training with the newly developed ‘LokoHelp’-System is feasible for non-ambulatory patients after stroke, spinal cord, and brain injury. A feasibility study. Brain Inj. 2008, 22, 625–632. [Google Scholar] [CrossRef] [PubMed]
- Meuleman, J.; van Asseldonk, E.; van Oort, G.; Rietman, H.; van der Kooij, H. LOPES II—Design and evaluation of an admittance-controlled gait training robot with a shadow leg approach. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 352–363. [Google Scholar] [CrossRef] [PubMed]
- Do, T.; Vu, D.T. A Simple Control Method for Exoskeleton for Rehabilitation. SSRG Int. J. Electr. Electron. Eng. (SSRG-IJEEE) 2017, 4, 7–12. [Google Scholar] [CrossRef]
- Ranaweera, R.K.P.S.; Jayasiri, W.A.T.I.; Tharaka, W.G.D.; Gunasiri, J.H.H.P.; Gopura, R.A.R.C.; Jayawardena, T.S.S.; Mann, G.K.I. Anthro-X: Anthropomorphic Lower Extremity Exoskeleton Robot for Power Assistance. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 82–87. [Google Scholar]
- Moreno, J.C.; Figueiredo, J.; Pons, J.L. Chapter 7 exoskeletons for lower-limb rehabilitation. In Rehabilitation Robotics; Colombo, R., Sanguineti, V., Eds.; Academic Press: New York, NY, USA, 2018; pp. 89–99. [Google Scholar]
- Herianto, H.; Saryanto, W.Y.; Cahyadi, A.I. Modeling and Design of Low-Cost Lower Limb Rehabilitation Robot Control System for Post-Stroke Patient using PWM Controller. Int. J. Mech. Mechatron. Eng. IJMME-IJENS 2016 2016, 16, 101–108. [Google Scholar]
- Mergner, T.; Lippi, V. Posture control-human-inspired approaches for humanoid robot benchmarking: Conceptualizing tests, protocols, and analysis. Front. Neurorobotics 2018, 12, 21. [Google Scholar] [CrossRef]
- Deng, M.Y.; Ma, Z.Y.; Wang, Y.N.; Wang, H.S.; Zhao, Y.B.; Wei, Q.X.; Yang, W.; Yang, C.J. Fall preventive gait trajectory planning of a lower limb rehabilitation exoskeleton based on capture point theory. Front. Inf. Technol. Electr. Eng. 2019, 20, 1322–1330. [Google Scholar] [CrossRef]
- Thang, N.C.; Manukid, P.; Tra My, P.T.; Gam LT, H.; Chung, P.N.; Hieu, N.N. Force Control of an Upper limb Exoskeleton for Perceiving Reality using Force Feed Forward Model. In Proceedings of the 5th International Conference on Engineering Mechanics and Automation (ICEMA 5), Hanoi, Vietnam, 11–12 October 2019; pp. 331–337. [Google Scholar]
- Sun, W.; Lin, J.-W.; Su, S.-F.; Wang, N.; Er, M.J. Reduced adaptive fuzzy decoupling control for lower limb exoskeleton. IEEE Trans. Cybern. 2020, 51, 1099–1109. [Google Scholar] [CrossRef]
- Gam, L.T.H.; Quan, D.H.; Thanh, B.T.; Van Bach Ngoc, P. Advanced Method for Motion Control of a 3 DOF Lower Limb Rehabilitation Robot. Int. J. Innov. Technol. Interdiscip. Sci. 2019, 2, 316–325. [Google Scholar]
- Slade, P.; Kochenderfer, M.J.; Delp, S.L.; Collins, S.H. Personalizing exoskeleton assistance while walking in the real world. Nature 2022, 610, 277–282. [Google Scholar] [CrossRef]
- Luo, S.; Androwis, G.; Adamovich, S.; Nunez, E.; Su, H.; Zhou, X. Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning. J. NeuroEngineering Rehabil. 2023, 20, 34. [Google Scholar] [CrossRef]
- Frisoli, A.; Borelli, L.; Montagner, A.; Marcheschi, S.; Procopio, C.; Salsedo, F.; Bergamasco, M.; Carboncini, M.C.; Tolaini, M.; Rossi, B. Arm rehabilitation with a robotic exoskeleton in virtual reality. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 631–642. [Google Scholar]
- Vertechy, R.; Frisoli, A.; Dettori, A.; Solazzi, M.; Bergamasco, M. Development of a new exoskeleton for upper limb rehabilitation. In Proceedings of the 2009 IEEE International Conference on Rehabilitation Robotics, Kyoto, Japan, 23–26 June 2009; pp. 188–193. [Google Scholar]
- Şahin, Y.; Botsalı, F.M.; Kalyoncu, M.; Tinkir, M.; Önen, Ü.; Yılmaz, N.; Baykan, Ö.K.; Çakan, A. Force Feedback Control of Lower Extremity Exoskeleton Assisting of Load Carrying Human. Appl. Mech. Mater. 2014, 598, 546–550. [Google Scholar] [CrossRef]
- Perry, J.C.; Rosen, J.; Burns, S. Upper arm power exoskeleton design. IEEE/ASME Trans. Mechatron. 2007, 12, 408–417. [Google Scholar] [CrossRef]
- Chen, G.; Qi, P.; Guo, Z.; Yu, H. Mechanical design and evaluation of a compact portable knee–ankle–foot robot for gait rehabilitation. Mech. Mach. Theory 2016, 103, 51–64. [Google Scholar] [CrossRef]
- Tsai, L.-W. Robot Analysis—The Mechanics of Serial and Parallel Manipulators; A Wiley-Interscience Publication: Hoboken, NJ, USA, 1999. [Google Scholar]
- Jamwal, P.K.; Xie, S.Q.; Hussain, S.; Parsons, J.G. An Adaptive Wearable Parallel Robot for the Treatment of Ankle Injuries. IEEE/ASME Trans. Mechatron. 2014, 19, 64–75. [Google Scholar] [CrossRef]
- Lu, R.; Li, Z.; Su, C.Y.; Xue, A. Development and learning control of a human limb with a rehabilitation exoskeleton. IEEE Trans. Ind. Electron. 2014, 61, 3776–3785. [Google Scholar] [CrossRef]
- Martin, P.; Emami, M.R. Aneuro-fuzzy approach to real-time trajectory generation for robotic rehabilitation. Robot. Auton. Syst. 2014, 62, 568–578. [Google Scholar] [CrossRef]
- Ju, M.S.; Lin, C.C.K.; Lin, D.H.; Hwang, I.S.; Chen, S.M. A rehabilitation robot with force-position hybrid fuzzy controller: Hybrid fuzzy control of rehabilitation robot. IEEE Trans. Neural Syst. Rehab Eng. 2005, 13, 349–358. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint i | αi Parameter | ai Parameter | di Parameter | θi Parameter |
|---|---|---|---|---|
| 1st joint | 0 | l1 | 0 | θ1 |
| 2nd joint | 0 | l2 | 0 | θ2 |
| 3rd joint | 0 | l3 | 0 | θ3 |
| Parameters | Thigh Link | Leg Link | Foot Platform |
|---|---|---|---|
| m (g) | 650 | 650 | 152 |
| L (mm) | 310 | 305 | 190 |
| DC motor parameter | 100 W—12VDC | 50 W—12VDC | 50 W—12VDC |
| Motor speed after gear | 160,000 pulses/rev | 920,200 pulses/rev | 920,200 pulses/rev |
| Encoder resolution | 400 pulses/rev | 400 pulses/rev | 400 pulses/rev |
| Force sensor (loadcell) | 10 kg | 5 kg | 5 kg |
| Case | |||
|---|---|---|---|
| Case 1 | 2 | 0.1 | 0.0101 |
| Case 2 | 2 | 0.15 | 0.0051 |
| Case 3 | 2 | 0.2 | 0.0031 |
| Case 4 | 2 | 0.25 | 0.0156 |
| Case | ||||
|---|---|---|---|---|
| Case 1 | 1 | 1 | 0.1 | 1.27 |
| Case 2 | 1 | 1 | 0.2 | 1.13 |
| Case 3 | 1 | 1 | 0.5 | 1.07 |
| Case 4 | 1 | 1 | 0.8 | 0.75 |
| Cases | Integral Squared Error |
|---|---|
| No applied force | JISE = 0.0012 |
| The applied force of 1N | JISE1 = 0.0012 |
| The applied force of 2N | JISE2 = 0.0009635 |
| The applied force of 5N | JISE3 = 0.0011 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gam, L.T.H.; Quan, D.H.; Ngoc, P.V.B.; Quan, B.H.; Thanh, B.T. Position–Force Control of a Lower-Limb Rehabilitation Robot Using a Force Feed-Forward and Compensative Gravity Proportional Derivative Method. Electronics 2024, 13, 4494. https://doi.org/10.3390/electronics13224494
Gam LTH, Quan DH, Ngoc PVB, Quan BH, Thanh BT. Position–Force Control of a Lower-Limb Rehabilitation Robot Using a Force Feed-Forward and Compensative Gravity Proportional Derivative Method. Electronics. 2024; 13(22):4494. https://doi.org/10.3390/electronics13224494
Chicago/Turabian StyleGam, Le T. H., Dam Hai Quan, Pham Van Bach Ngoc, Bui Hong Quan, and Bui Trung Thanh. 2024. "Position–Force Control of a Lower-Limb Rehabilitation Robot Using a Force Feed-Forward and Compensative Gravity Proportional Derivative Method" Electronics 13, no. 22: 4494. https://doi.org/10.3390/electronics13224494
APA StyleGam, L. T. H., Quan, D. H., Ngoc, P. V. B., Quan, B. H., & Thanh, B. T. (2024). Position–Force Control of a Lower-Limb Rehabilitation Robot Using a Force Feed-Forward and Compensative Gravity Proportional Derivative Method. Electronics, 13(22), 4494. https://doi.org/10.3390/electronics13224494