




A Survey of Open-Source UAV Autopilots


Abstract
1. Introduction
2. Methodology
3. Prominent Open-Source Autopilots
3.1. Technical Features of Prominent Open-Source Autopilots
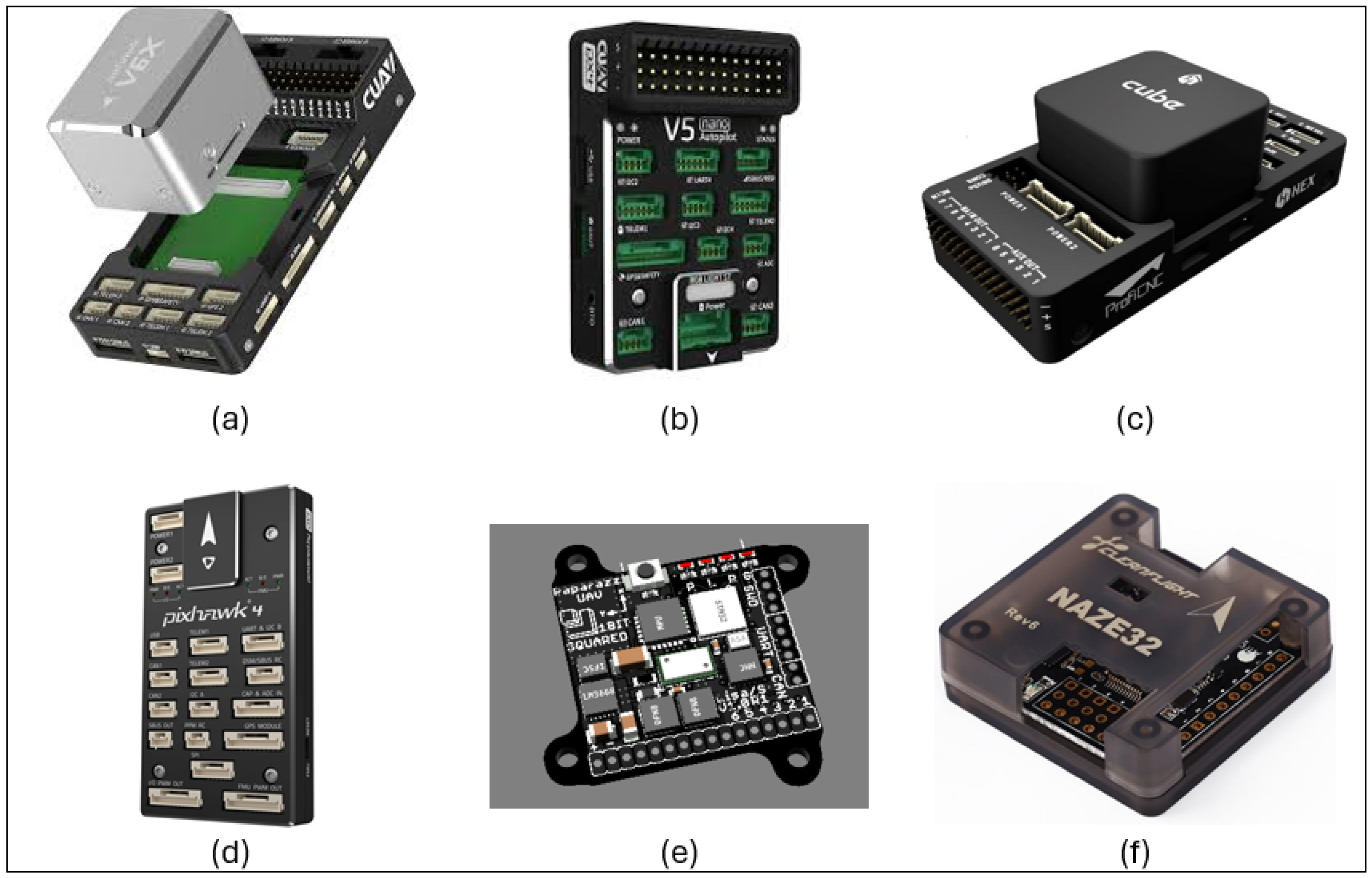
3.1.1. Open Hardware and Compatibility
3.1.2. Software Considerations
3.1.3. Communication Protocols
3.1.4. Ground Control Stations Systems
4. Analysis of Tools for UAVs’ Applications Deployment
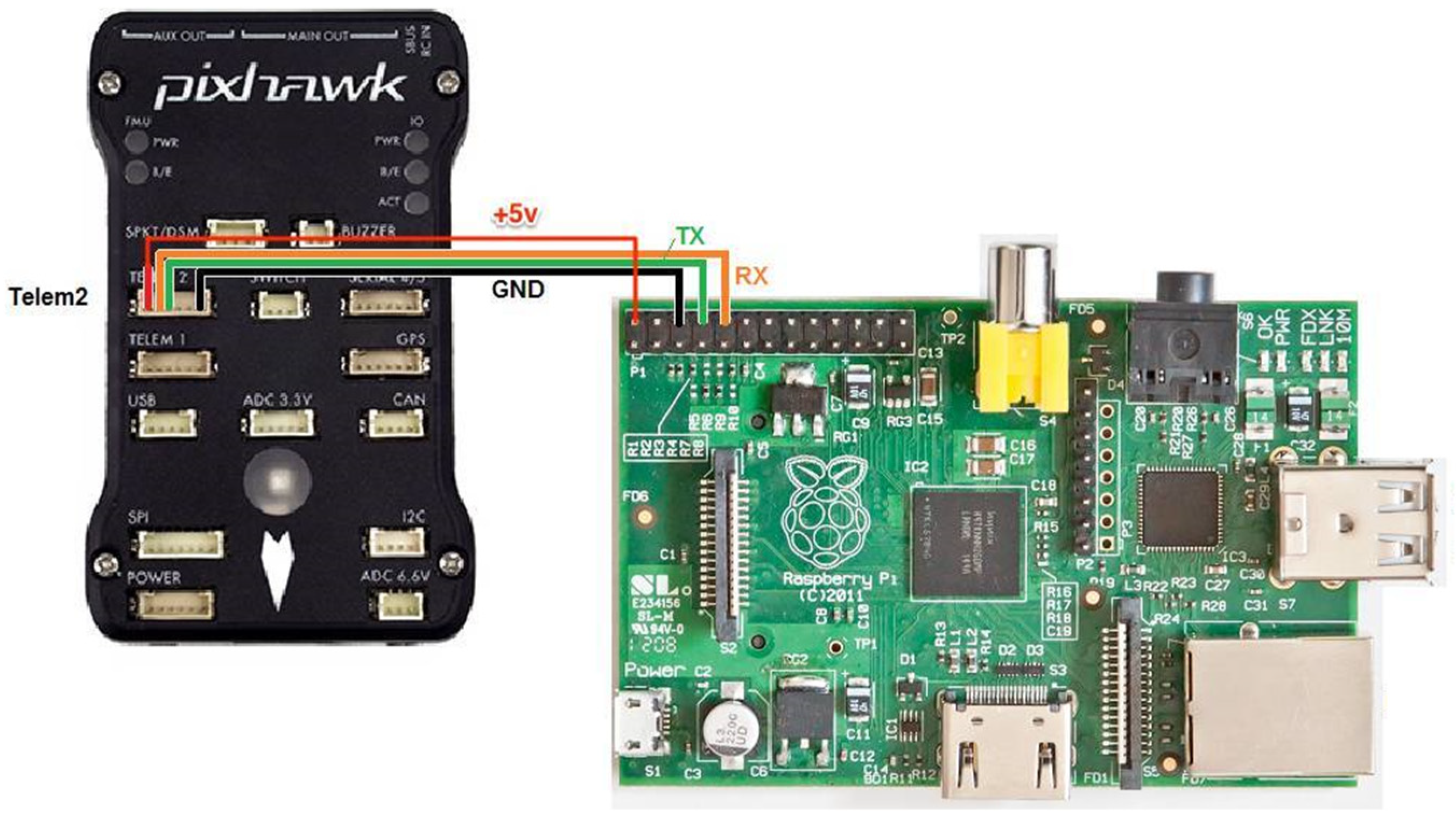
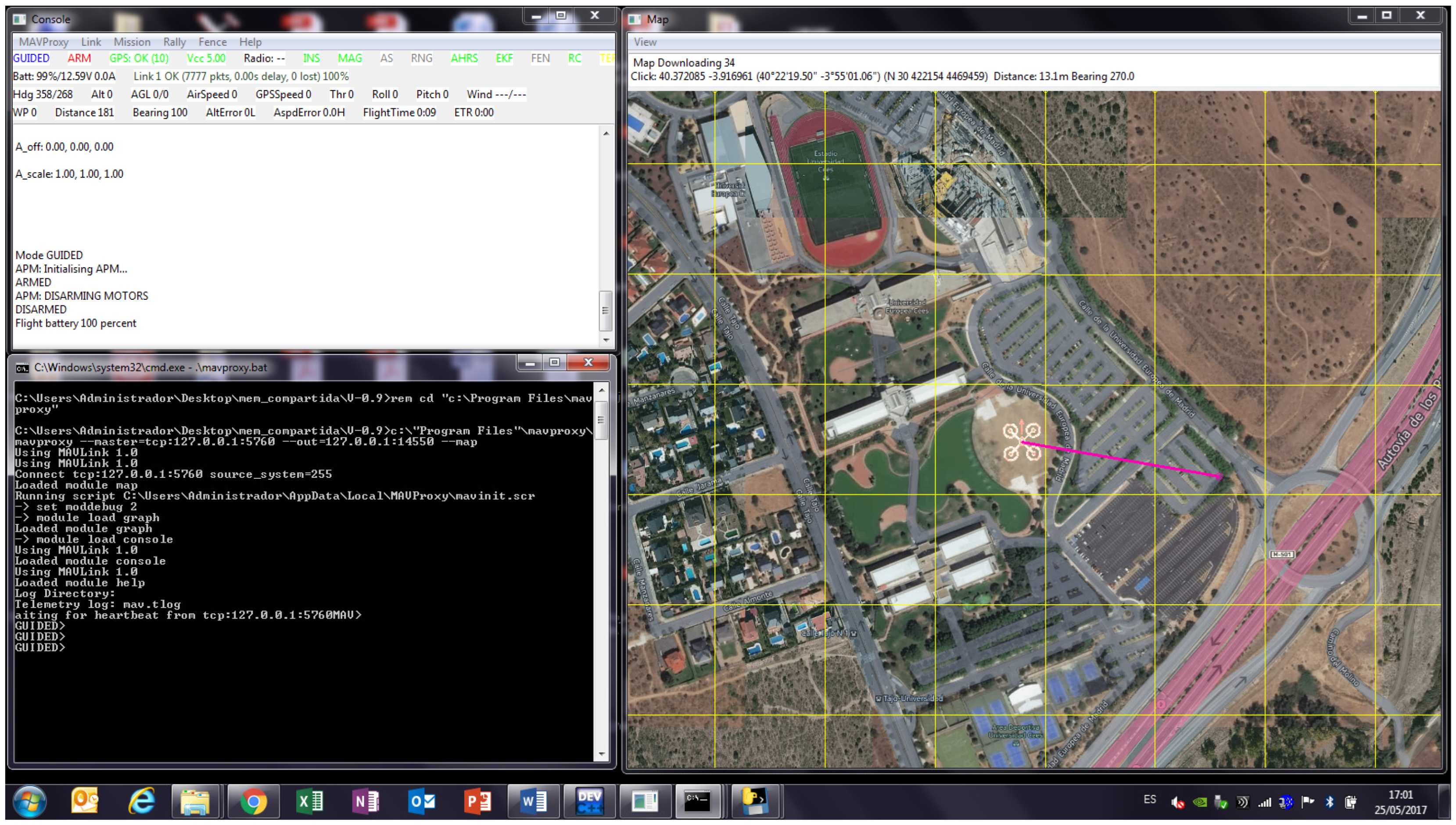
4.1. Use of Companion Computers
4.2. ROS Integration
4.3. MATLAB/Simulink and Pixhawk Support Package
4.4. SITL and HITL Simulations
5. Advantages and Disadvantages of Each Autopilot
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- ArduPilot. Available online: https://ArduPilot.org/dev/index.html (accessed on 10 November 2024).
- Pixhawk. Available online: https://pixhawk.org/ (accessed on 10 November 2024).
- PX4. Available online: https://px4.io/ (accessed on 10 November 2024).
- Paparazzi. Available online: https://wiki.paparazziuav.org/wiki/Main_Page (accessed on 10 November 2024).
- LibrePilot. Available online: https://www.librepilot.org/site/index.html (accessed on 10 November 2024).
- Betaflight. Available online: https://betaflight.com/ (accessed on 10 November 2024).
- iNAV. Available online: https://github.com/inavFlight/inav/wiki (accessed on 10 November 2024).
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open-source robotics framework for deeply embedded platforms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar] [CrossRef]
- Drouin, A.; Brisset, P.; Jestin, Y. Reengineering the Paparazzi Autopilot Navigation System. IFAC Proc. 2007, 40, 270–275. [Google Scholar] [CrossRef]
- Ardupilot-ChibiOS. Available online: https://ardupilot.org/copter/docs/common-loading-chibios-firmware-onto-pixhawk.html (accessed on 20 November 2024).
- DoneKit-Python. Available online: https://dronekit.netlify.app/about/overview (accessed on 20 November 2024).
- Lua-Scriting. Available online: https://ardupilot.org/dev/docs/common-lua-scripts.html (accessed on 20 November 2024).
- PX4-NuttX. Available online: https://docs.px4.io/main/en/concept/architecture.html#os-specific-information (accessed on 20 November 2024).
- MAVSDK. Available online: https://mavsdk.mavlink.io/main/en/index.html (accessed on 20 November 2024).
- Paparazzi-ChibiOS. Available online: https://wiki.paparazziuav.org/wiki/RT_Paparazzi#Paparazzi_with_ChibiOS/RT (accessed on 20 November 2024).
- Pprzlink. Available online: https://wiki.paparazziuav.org/wiki/Pprzlink (accessed on 20 November 2024).
- FreeRTOS. Available online: https://librepilot.atlassian.net/wiki/spaces/LPDOC/pages/100523730/LibrePilot+System+Architecture (accessed on 20 November 2024).
- YAMSpy Protocol. Available online: https://github.com/thecognifly/YAMSPy (accessed on 20 November 2024).
- MAVLink. Available online: https://MAVLink.io/en/ (accessed on 10 November 2024).
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: Survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Allouch, A.; Cheikhrouhou, O.; Koubaa, A.; Khalgui, M.; Abbes, T. MAVSec: Securing the MAVLink Protocol for Ardupilot/PX4 Unmanned Aerial Systems. In Proceedings of the 2019 15th International Wireless Communications and Mobile Computing Conference, IWCMC 2019, Tangier, Morocco, 24–28 June 2019. [Google Scholar]
- PprzLink. Available online: https://pprzlink.readthedocs.io/en/latest/ (accessed on 20 November 2024).
- UAVTalk. Available online: https://librepilot.atlassian.net/wiki/spaces/LPDOC/pages/8552471/UAVTalk (accessed on 20 November 2024).
- MSP. Available online: https://github.com/iNavFlight/inav/wiki/MSP-V2 (accessed on 20 November 2024).
- APM Planner2. Available online: https://ardupilot.org/planner2/ (accessed on 10 November 2024).
- MissionPlaner. Available online: https://ardupilot.org/planner/ (accessed on 10 November 2024).
- Adropilot. Available online: https://diydrones.com/group/andropilot-users-group (accessed on 10 November 2024).
- MAVProxy. Available online: https://ardupilot.org/mavproxy/ (accessed on 10 November 2024).
- QGroundControl. Available online: http://qgroundcontrol.com/ (accessed on 10 November 2024).
- Paparazzi Center. Available online: https://paparazzi-uav.readthedocs.io/en/latest/quickstart/paparazzi_center_tour.html (accessed on 20 November 2024).
- MAVROS. Available online: https://github.com/MAVLink/MAVROS (accessed on 10 November 2024).
- Perez, E.; Winger, A.; Tran, A.; Garcia-Paredes, C.; Run, N.; Keti, N.; Bhandari, S.; Raheja, A. Autonomous Collision Avoidance System for a Multicopter using Stereoscopic Vision. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 579–588. [Google Scholar]
- De Cos, C.R.; Fernandez, M.J.; Sanchez-Cuevas, P.J.; Acosta, J.Á.; Ollero, A. High-level modular autopilot solution for fast prototyping of unmanned aerial systems. IEEE Access 2020, 8, 223827–223836. [Google Scholar] [CrossRef]
- Wilson, A.N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Embedded sensors, communication technologies, computing platforms and machine learning for UAVs: A review. IEEE Sens. J. 2021, 22, 1807–1826. [Google Scholar] [CrossRef]
- Kumar, R.H.; Vanjare, A.M.; Omkar, S.N. Autonomous Drone Navigation using Monocular Camera and Light Weight Embedded System. In Proceedings of the 2023 International Conference for Advancement in Technology (ICONAT), Goa, India, 24–26 January 2023; pp. 1–6. [Google Scholar]
- Sinisterra, A.; Dhanak, M.; Kouvaras, N. A USV platform for surface autonomy. In Proceedings of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Singhania, P.; Siddharth, R.N.; Das, S.; Suresh, A.K. Autonomous navigation of a multirotor using visual odometry and dynamic obstacle avoidance. In Proceedings of the 2017 IARC Symposium on Indoor Flight Issues, Beijing, China, 18–20 August 2017. [Google Scholar]
- Diez-Tomillo, J.; Alcaraz-Calero, J.M.; Wang, Q. Edge-accelerated UAV operations: A case study of open-source solutions. In Proceedings of the 2024 International Wireless Communications and Mobile Computing (IWCMC), Ayia Napa, Cyprus, 27–31 May 2024; pp. 114–119. [Google Scholar]
- Pulungan, A.B.; Putra, Z.Y.; Sidiqi, A.R.; Hamdani, H.; Parigalan, K. Drone Kit-Python for Autonomous Quadcopter Navigation. JOIV Int. J. Inform. Vis. 2024, 8, 1287–1294. [Google Scholar] [CrossRef]
- Koubâa, A.; Qureshi, B.; Sriti, M.-F.; Allouch, A.; Javed, Y.; Alajlan, M.; Cheikhrouhou, O.; Khalgui, M.; Tovar, E. Dronemap Planner: A service-oriented cloud-based management system for the Internet-of-Drones. Ad Hoc Netw. 2019, 86, 46–62. [Google Scholar] [CrossRef]
- Kumar, G.P.; Sridevi, B. Chapter 6—Development of Efficient Swarm Intelligence Algorithm for Simulating Two-Dimensional Orthomosaic for Terrain Mapping Using Cooperative Unmanned Aerial Vehicles; Academic Press: Cambridge, MA, USA, 2020; pp. 75–93. [Google Scholar] [CrossRef]
- Wu, C.H.; Tu, S.H.; Tu, S.W.; Wang, L.H.; Chen, W.H. Realization of Remote Monitoring and Navigation System for Multiple UAV Swarm Missions: Using 4G/WiFi-Mesh Communications and RTK GPS Positioning Technology. In Proceedings of the 2022 International Automatic Control Conference (CACS), Kaohsiung, Taiwan, 3–6 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Koulianos, A.; Litke, A. Blockchain technology for secure communication and formation control in smart drone swarms. Future Internet 2023, 15, 344. [Google Scholar] [CrossRef]
- Soares, D.A.; Ramos, A.C.B.; da Costa Junior, R.A. Development of a Portable, Low-Cost System for Ground Control Station for Drones. In Proceedings of the Information Technology-New Generations: 14th International Conference on Information Technology, Las Vegas, NV, USA, 10–12 April 2018; Springer International Publishing: New York, NY, USA, 2018; pp. 767–771. [Google Scholar]
- Villa, D.K.; Brandao, A.S.; Sarcinelli-Filho, M. A survey on load transportation using multirotor UAVs. J. Intell. Robot. Syst. 2020, 98, 267–296. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Wang, X. Research on Ad Hoc Network Routing Protocol for UAV Application. In Proceedings of the International Conference on 5G for Future Wireless Networks, Harbin, China, 17–18 December 2022; Springer Nature Switzerland: Cham, Switzerland, 2022; pp. 75–83. [Google Scholar]
- Patil, D.; Pournouri, S. Evaluating the Security of Open-Source Linux Operating Systems for Unmanned Aerial Vehicles. In Proceedings of the International Conference on Global Security, Safety, and Sustainability, London, UK, 11–12 October 2023; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 21–49. [Google Scholar]
- Wang, H.; Chen, S.; Durak, U.; Hartmann, S. Simulation infrastructure for aeronautical informatics education. In Proceedings of the 50th Computer Simulation Conference, Bordeaux, France, 9–12 July 2018; pp. 1–12. [Google Scholar]
- Chen, S.; Durak, U.; Hartmann, S. Modeling and Simulation-based Development of Autonomy Features for Drones. Simul. Notes Eur. 2018, 28, 55–60. [Google Scholar] [CrossRef]
- Pise, A.; Bhandari, H.; Jadhav, K.; Dorge, S.; Mankar, G.; Yewale, P.M. Image processing-based drone for monitoring and surveillance. Image 2020, 7, 145–148. [Google Scholar]
- Bigazzi, L.; Basso, M.; Boni, E.; Innocenti, G.; Pieraccini, M. A multilevel architecture for autonomous uavs. Drones 2021, 5, 55. [Google Scholar] [CrossRef]
- Bigazzi, L.; Gherardini, S.; Innocenti, G.; Basso, M. Development of non-expensive technologies for precise maneuvering of completely autonomous unmanned aerial vehicles. Sensors 2021, 21, 391. [Google Scholar] [CrossRef] [PubMed]
- Foehn, P.; Romero, A.; Scaramuzza, D. Time-optimal planning for quadrotor waypoint flight. Sci. Robot. 2021, 6, eabh1221. [Google Scholar] [CrossRef] [PubMed]
- Córdoba, J.O.; Zarca, A.M.; Skármeta, A. Unmanned Aerial Vehicle Multi-Access Edge Computing as Security Enabler for Next-Gen 5G Security Frameworks. Intell. Autom. Soft Comput. 2023, 37, 2307–2333. [Google Scholar]
- ROS. Available online: https://docs.px4.io/main/en/ros/ros2_comm.html (accessed on 10 November 2024).
- XRCE-DDS. Available online: https://docs.px4.io/main/en/middleware/uxrce_dds.html (accessed on 10 November 2024).
- Baldi, S.; Sun, D.; Xia, X.; Zhou, G.; Liu, D. ArduPilot-Based Adaptive Autopilot: Architecture and Software-in-the-Loop Experiments. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4473–4485. [Google Scholar] [CrossRef]
- Bernardeschi, C.; Fagiolini, A.; Palmieri, M.; Scrima, G.; Sofia, F. Ros/Gazebo based simulation of co-operative uavs. In Proceedings of the Modelling and Simulation for Autonomous Systems: 5th International Conference, MESAS 2018, Prague, Czech Republic, 17–19 October 2018; Revised Selected Papers 5. Springer International Publishing: New York, NY, USA, 2019; pp. 321–334. [Google Scholar]
- Ma, C.; Zhou, Y.; Li, Z. A New Simulation Environment Based on Airsim, ROS, and PX4 for Quadcopter Aircrafts. In Proceedings of the 2020 6th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 20–23 April 2020; pp. 486–490. [Google Scholar] [CrossRef]
- Daspan, A.; Nimsongprasert, A.; Srichai, P.; Wiengchanda, P. Implementation of Robot Operating System in Raspberry Pi 4 for Autonomous Landing Quadrotor on ArUco Marker. Int. J. Mech. Eng. Robot. Res. 2023, 12, 210–215. [Google Scholar] [CrossRef]
- Fernandez, M.J.; Sanchez-Cuevas, P.J.; Heredia, G.; Ollero, A. Securing UAV communications using ROS with custom ECIES-based method. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 237–246. [Google Scholar]
- Schmittle, M.; Lukina, A.; Vacek, L.; Das, J.; Buskirk, C.P.; Rees, S.; Sztipanovits, J.; Grosu, R.; Kumar, V. OpenUAV: A UAV testbed for the CPS and robotics community. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; pp. 130–139. [Google Scholar]
- Pprzros. Available online: https://github.com/enacuavlab/pprzros (accessed on 10 November 2024).
- Sbus. Available online: https://github.com/LTU-RAI/mav_sbus_bridge (accessed on 10 November 2024).
- Price, E.; Liu, Y.T.; Black, M.J.; Ahmad, A. Simulation and Control of Deformable Autonomous Airships in Turbulent Wind. In Intelligent Autonomous Systems 16 (IAS 2021); Ang, M.H., Jr., Asama, H., Lin, W., Foong, S., Eds.; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2022; Volume 412. [Google Scholar] [CrossRef]
- Wessendorp, N.; Dinaux, R.; Dupeyroux, J.; de Croon, G.C. Obstacle Avoidance onboard MAVs using a FMCW RADAR. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 21 September–1 October 2021; pp. 117–122. [Google Scholar]
- MATLAB-PSP. Available online: https://es.mathworks.com/help/supportpkg/px4/index.html (accessed on 30 September 2024).
- Wang, S.; Dai, X.; Ke, C.; Quan, Q. RflySim: A Rapid Multicopter Development Platform for Education and Research Based on Pixhawk and MATLAB. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1587–1594. [Google Scholar] [CrossRef]
- Quan, Q.; Dai, X.; Wang, S. Multicopter Design and Control Practice: A Series Experiments Based on MATLAB and Pixhawk; Springer Nature: Berlin, Germany, 2020. [Google Scholar]
- Hareha, A.; Bousbaine, A.; Josaph, A.K. A Hardware Implementation of 6DOF Quadcopter MATLAB/Simulink Controller Algorithm to an Autopilot. In Proceedings of the 10th International Conference on Power Electronics, Machines and Drives (PEMD 2020), Online, 15–17 December 2020; pp. 485–490. [Google Scholar] [CrossRef]
- Jing, Y.; Wang, X.; Heredia-Juesas, J.; Fortner, C.; Giacomo, C.; Sipahi, R.; Martinez-Lorenzo, J. PX4 Simulation Results of a Quadcopter with a Disturbance-Observer-Based and PSO-Optimized Sliding Mode Surface Controller. Drones 2022, 6, 261. [Google Scholar] [CrossRef]
- MATLAB-SITL. Available online: https://ardupilot.org/dev/docs/sitl-with-MATLAB.html (accessed on 10 November 2024).
- Muller, Y.; Oshiro, S.; Motohara, T.; Kinjo, A.; Suzuki, T.; Wada, T. Underwater Acoustic Mavlink Communication for Swarming AUVS. IJCSNS 2021, 21, 277. [Google Scholar]
- Ibrahim, N.A.; Zakaria, M.Y.; Kamal, A. Development of a Flight Test Data Analyzer for Pixhawk Autopilots. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; Volume 2023, p. 0482. [Google Scholar]
- Offermann, A.; De Miras, J.; Castillo, P. Software architecture for controlling in real time aerial prototypes. In Proceedings of the 2023 International Conference on Unmanned Aircraft Systems (ICUAS), Warsaw, Poland, 6–9 June 2023; pp. 493–498. [Google Scholar]
- Ardu-SITL. Available online: https://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html (accessed on 10 November 2024).
- Gazebo. Available online: https://gazebosim.org/docs (accessed on 10 November 2024).
- Flightgear. Available online: https://www.flightgear.org/about/ (accessed on 10 November 2024).
- jMavSim. Available online: https://docs.px4.io/main/en/sim_jmavsim/ (accessed on 10 November 2024).
- AirSim. Available online: https://www.microsoft.com/en-us/research/project/aerial-informatics-robotics-platform/ (accessed on 10 November 2024).
- JSBSim. Available online: https://jsbsim.sourceforge.net/ (accessed on 10 November 2024).
- Webots. Available online: https://cyberbotics.com/doc/guide/introduction-to-webots (accessed on 10 November 2024).
- Lai, K.-T.; Chung, Y.-T.; Su, J.-J.; Lai, C.-H.; Huang, Y.-H. AI Wings: An AIoT Drone System for Commanding ArduPilot UAVs. IEEE Syst. J. 2023, 17, 2213–2224. [Google Scholar] [CrossRef]
- Moon, S.; Bird, J.J.; Borenstein, S.; Frew, E.W. A Gazebo/ROS-based Communication-Realistic Simulator for Networked sUAS. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1819–1827. [Google Scholar] [CrossRef]
- Baidya, S.; Shaikh, Z.; Levorato, M. Flynetsim: An open source synchronized uav network simulator based on ns-3 and ardupilot. In Proceedings of the 21st ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, MSWIM’18, Montreal, QC, Canada, 28 October–1 November 2018; ACM: New York, NY, USA; pp. 37–45. [Google Scholar] [CrossRef]
- Karachalios, T.; Moschos, P.; Orphanoudakis, T. Maritime Emission Monitoring: Development and Testing of a UAV-Based Real-Time Wind Sensing Mission Planner Module. Sensors 2024, 24, 950. [Google Scholar] [CrossRef]
- Nguyen, K.D.; Ha, C. Development of Hardware-in-the-Loop Simulation Based on Gazebo and Pixhawk for Unmanned Aerial Vehicles. Int. J. Aeronaut. Space Sci. 2018, 19, 238–249. [Google Scholar] [CrossRef]
- Omar, H.M. Hardware-In-the-Loop Simulation of Time-Delayed Anti-Swing Controller for Quadrotor with Suspended Load. Appl. Sci. 2022, 12, 1706. [Google Scholar] [CrossRef]
- Hancer, M.; Bitirgen, R.; Bayezit, I. Designing 3-DOF Hardware-In-The-Loop Test Platform Controlling Multirotor Vehicles. IFAC-PapersOnLine 2018, 51, 119–124. [Google Scholar] [CrossRef]
- Wang, H.; Azaizia, D.; Lu, C.; Zhang, B.; Zhao, X.; Liu, Y. Hardware in the loop based 6DoF test platform for multi-rotor UAV. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 1693–1697. [Google Scholar]
- Thebe, K.Z.; Jamisola, R.S.; Ramalepa, L.P. A novel approach to control four multi-rotor drones in cooperative paired control using relative Jacobian. Robotica 2023, 41, 3004–3021. [Google Scholar] [CrossRef]
- Paparazzi Center. Available online: https://wiki.paparazziuav.org/wiki/Simulation (accessed on 10 November 2024).
- Brisset, P.; Drouin, A.; Gorraz, M.; Huard, P.S.; Tyler, J. The paparazzi solution. In Proceedings of the MAV 2006, 2nd US-European Competition and Workshop on Micro Air Vehicles, Sandestin, FL, USA, 30 October–2 November 2006. [Google Scholar]
- Coopmans, C.; Podhradsky, M.; Hoffer, N.V. Software-and hardware-in-the-loop verification of flight dynamics model and flight control simulation of a fixed-wing unmanned aerial vehicle. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancún, Mexico, 23–25 November 2015; pp. 115–122. [Google Scholar]
- Zhao, D.L.; Anvar, A.M. Modelling and Simulation of Maritime UAV-VTOL Robot Flight Control. Appl. Mech. Mater. 2012, 152, 1149–1154. [Google Scholar] [CrossRef]
- Bailon-Ruiz, R.; Reymann, C.; Lacroix, S.; Hattenberger, G.; De Marina, H.G.; Lamraoui, F. System simulation of a fleet of drones to probe cumulus clouds. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 375–382. [Google Scholar]
- Lashgari, M.; Naghash, A. Hardware in the loop simulation and implementation of a dragonfly-like MAV using clap and fling mechanism. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 3363–3377. [Google Scholar] [CrossRef]
- Bilgin, Z.; Bronz, M.; Yavrucuk, I. Experimental evaluation of robustness of panel-method-based path planning for urban air mobility. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3509. [Google Scholar]
- Garcia, J.; Brock, A.; Saporito, N.; Hattenberger, G.; Paris, X.; Gorraz, M.; Jestin, Y. Designing human-drone interactions with the Paparazzi UAV System. In Proceedings of the 1st International Workshop on HumanDrone Interaction (CHI’19), Glasgow, UK, 4–9 May 2019. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Autopilot | Year | Country | Discontinuity |
|---|---|---|---|
| Paparazzi | 2003 | France | Active |
| MatrixPilot | 2008 | USA | 2016 |
| APM (ArdupilotMega) | 2009 | USA | Active |
| MultiWii | 2010 | USA | 2016 |
| PX4 (Pixhawk) | 2011 | Switzerland | Active |
| Baseflight | 2012 | USA | 2014 |
| TauLabs | 2012 | USA | 2016 |
| OpenPilot | 2013 | USA | 2015 |
| Cleanflight | 2014 | USA | 2020 |
| LibrePilot | 2015 | USA | Active |
| Betafilght | 2015 | USA | Active |
| dRonin | 2015 | USA | 2019 |
| iNAV | 2016 | USA | Active |
| Autopilot | Copters | Fixed Wings | RotorCraft | Rovers | Aquatic |
|---|---|---|---|---|---|
| Paparazzi | Tri, Quad, Hexa, Octo | Yes | Yes | - | Yes |
| APM (Ardupilot) | Tri, Quad, Hexa, Octo | Yes | Yes | Yes | Yes |
| PX4 (Pixhawk) | Tri, Quad, Hexa, Octo | Yes | Basic | Yes | Yes |
| LibrePilot | Tri, Quad, Hexa, Octo | Yes | - | Basic | Basic |
| Betafilght | Tri, Quad, Hexa, Octo | Yes | Basic | - | - |
| iNAV | Tri, Quad, Hexa, Octo | Yes | Basic | Yes | Basic |
| Board | Models | Autopilot | Main Features |
|---|---|---|---|
| Pixhawk | Pixhawk 3–6, Pixracer, Mini | PX4, Ardupilot, Paparazzi | Hobby, Research, Education |
| CUAV | CUAV V5+, CUAV X7 | PX4, Ardupilot | High-End UAV, Industrial |
| Lisa | Lisa/M, Lisa/S | Paparazzi | Research, Education |
| Apogee | Apogee V.1.1 | Paparazzi | Education |
| Naze | Naze32 | Betaflight | Racing |
| CC3D | CC3D | LibrePilot | Hobby, DIY projects |
| Kakute | F4, F7 | Betaflight, iNAV | Racing, Freestyle |
| Omnibus | F3, F4, F7 | Betaflight, iNAV | Racing, Long-range drones |
| Autopilot | Scripting Language | RTOS | Communication Protocol |
|---|---|---|---|
| Paparazzi | C, OCaml, Python | ChibiOs | Pprzlink |
| APM (Ardupilot) | Python, JavaScript. Lua | ChibiOS, NuttX | Mavlink |
| PX4 (Pixhawk) | C++, Python, Swift | NuttX | Mavlink |
| LibrePilot | - | FreeRTOS | UAVTalk |
| Betafilght | Python | - | MSP, Mavlink |
| iNAV | Python | - | MSP, Mavlink |
| GCS | Platform |
|---|---|
| MissionPlanner | Windows, Mac os |
| APM Planner | Windows, Mac os, Linux |
| Mavproxy | Linux |
| Andropilot | Android, |
| QGroundControl | Windows, Mac os, Linux, Android, |
| Betafilght-Configurator | Windows, Mac os, Linux |
| iNAV-Configurator | Windows, Mac os, Linux |
| Simulator | Scripting Language | Platform | Autopilot | ROS |
|---|---|---|---|---|
| Ardu-SITL | C, Python | Win, Lin | Ardupilot | Yes |
| Gazebo | C++, Python | Win, Lin, Mac | Ardupilot, PX4, Paparazzi Betafligh, | Yes |
| FlighGear | Nasal, C++ | Win, Lin, Mac | Ardupilot, PX4, Paparazzi | Yes |
| JMAVSim | Mavlink | Win, Lin, Mac | PX4 | Yes |
| AirSim | C#, Java, and Python | Win, Lin | Ardupilot, PX4 | Yes |
| JSBSim | Xml | Win, Lin, Mac | Ardupilot, PX4, Paparazzi | Yes |
| Webots | C++, python, java | Win, Lin, Mac | Multiple | Yes |
| Autopilot | ROS | MATLAB PSP | SITL/HITL | Com. Computer | Educ/Research |
|---|---|---|---|---|---|
| Ardupilot | Strong | Moderate | Strong | Strong | Strong |
| PX4 | Strong | Strong | Strong | Strong | Strong |
| Paparazzi | Moderate | Limited | Strong | Strong | Moderate |
| LibrePilot | Limited | Limited | Limited | Moderate | Limited |
| Betafilght | Limited | Limited | Limited | Limited | Limited |
| iNAV | Limited | Limited | Limited | Moderate | Limited |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aliane, N. A Survey of Open-Source UAV Autopilots. Electronics 2024, 13, 4785. https://doi.org/10.3390/electronics13234785
Aliane N. A Survey of Open-Source UAV Autopilots. Electronics. 2024; 13(23):4785. https://doi.org/10.3390/electronics13234785
Chicago/Turabian StyleAliane, Nourdine. 2024. "A Survey of Open-Source UAV Autopilots" Electronics 13, no. 23: 4785. https://doi.org/10.3390/electronics13234785
APA StyleAliane, N. (2024). A Survey of Open-Source UAV Autopilots. Electronics, 13(23), 4785. https://doi.org/10.3390/electronics13234785