
A Fast Modeling Method for BOR–FDTD


Abstract
:1. Introduction
2. Basic Theory of BOR–FDTD
3. Target Modeling and Mesh Generation
- (1)
- The geometric model is constructed and the coordinate data of the model are obtained.
- (2)
- Apply the optimized Delaunay algorithm to triangulate the geometric model, resulting in a triangular mesh model and exporting the triangular mesh data.
- (3)
- Transform the triangular mesh model of the target into the BOR–FDTD computational model using the projection intersection method.
- (4)
- Display the discretized computational model.
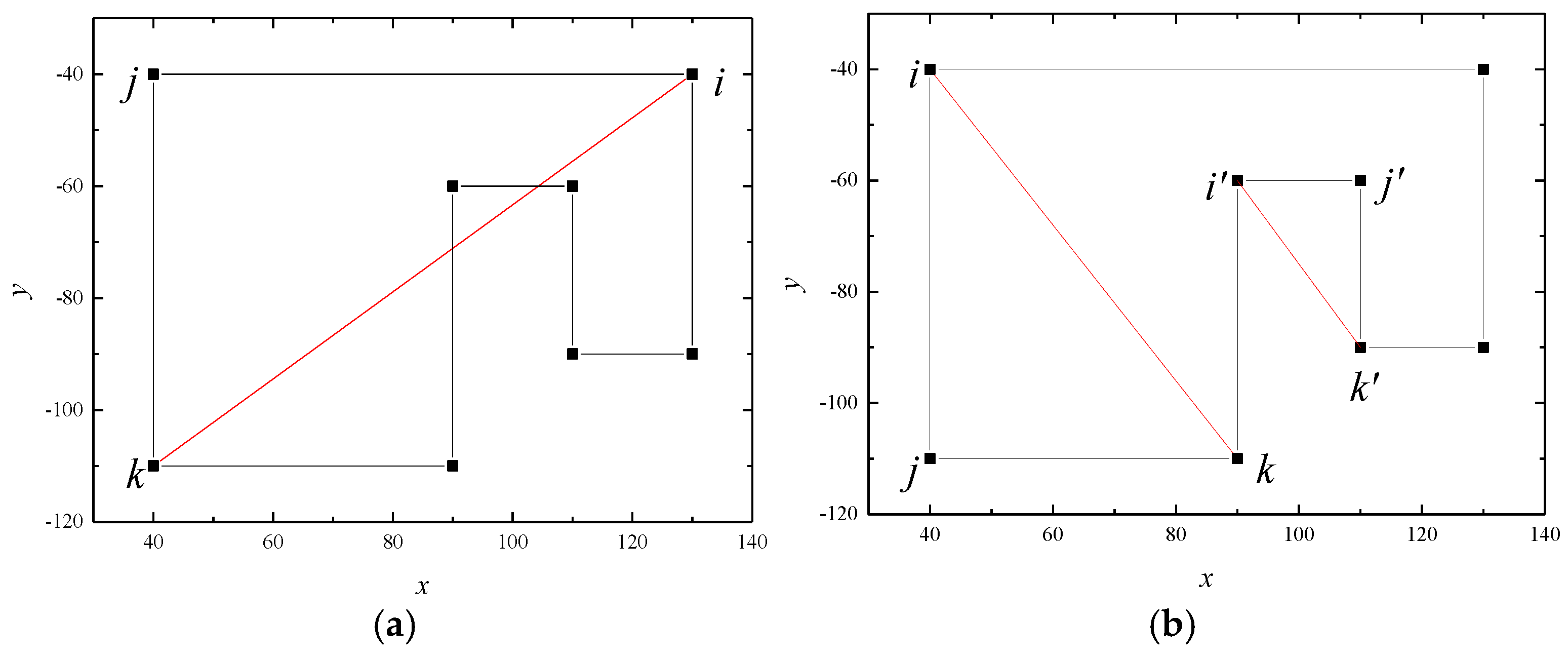
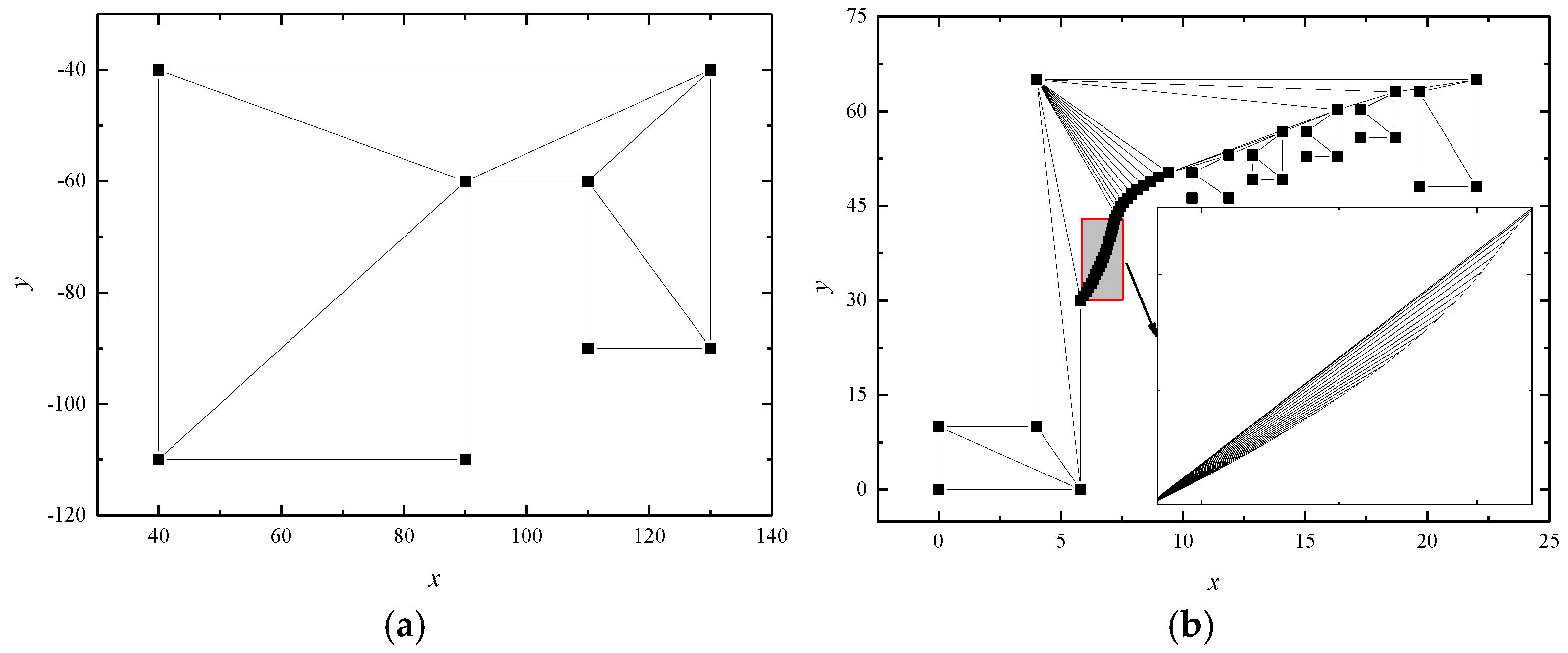
3.1. The Triangulation Algorithm
3.2. The Algorithm for Transforming Triangular Meshes into BOR–FDTD Computational Meshes
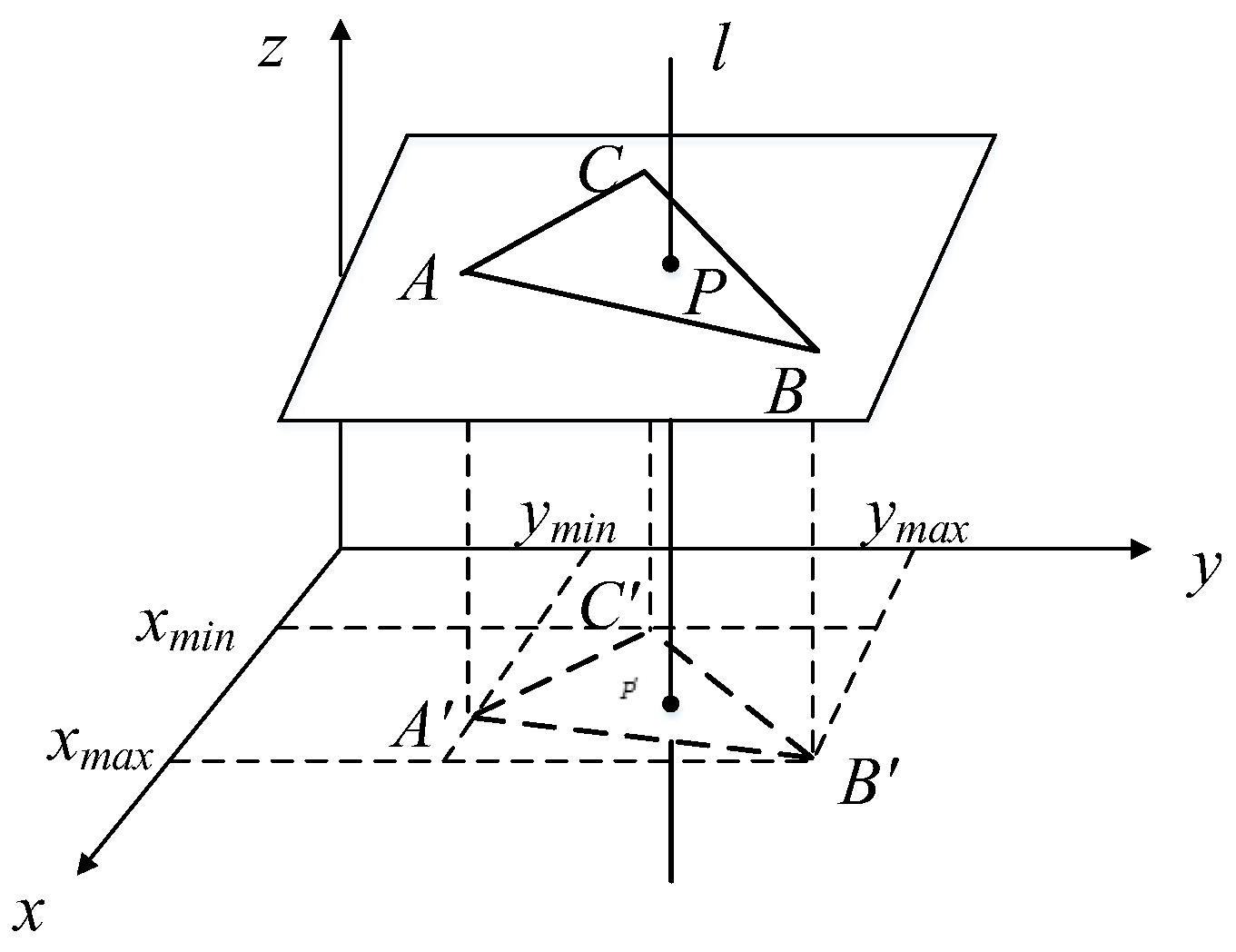
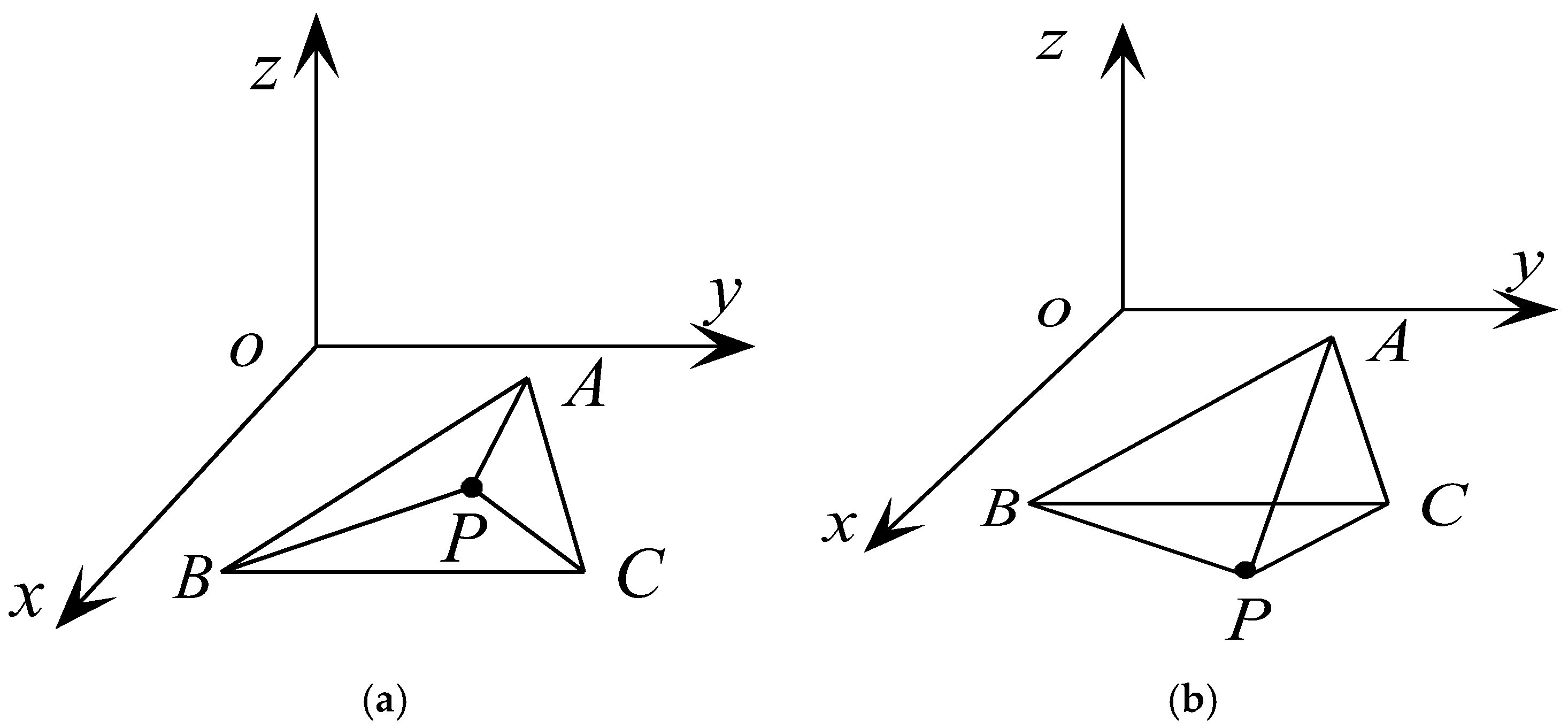
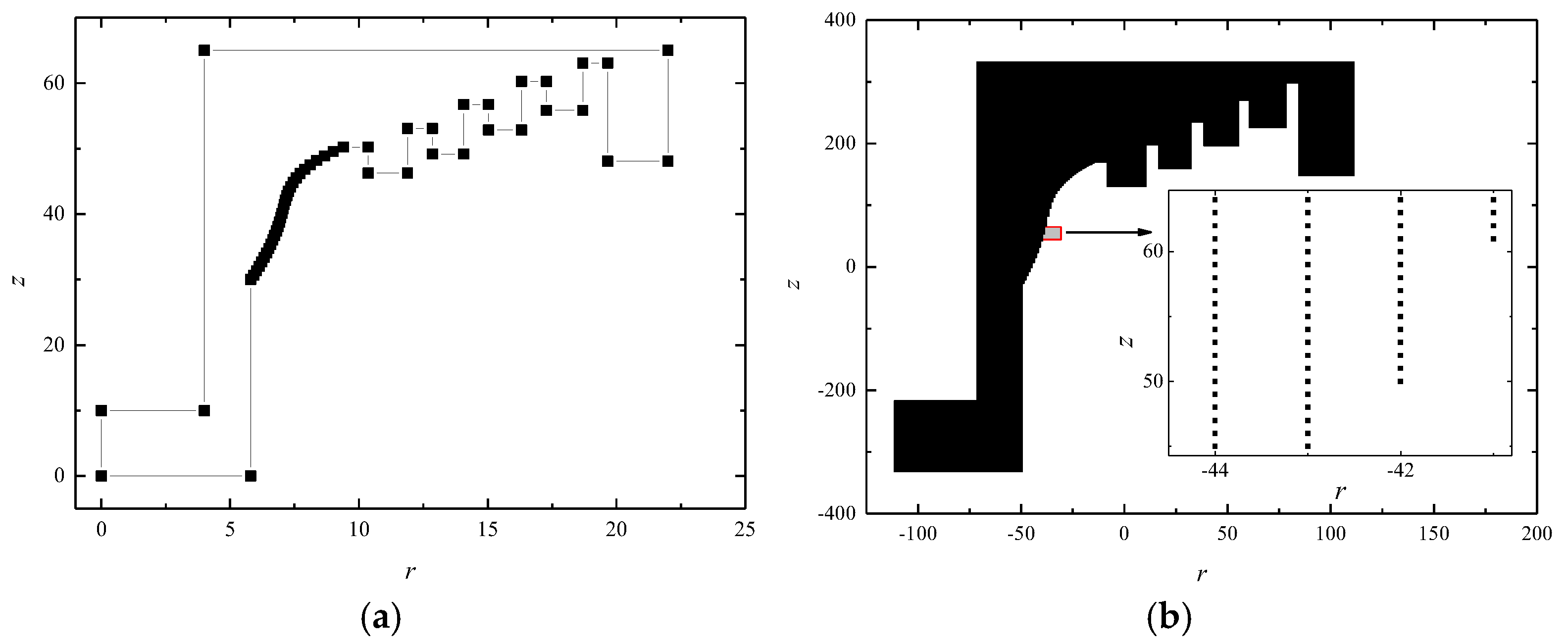
3.2.1. The Fast Modeling Method for Projection Intersection of Complex 3D Targets
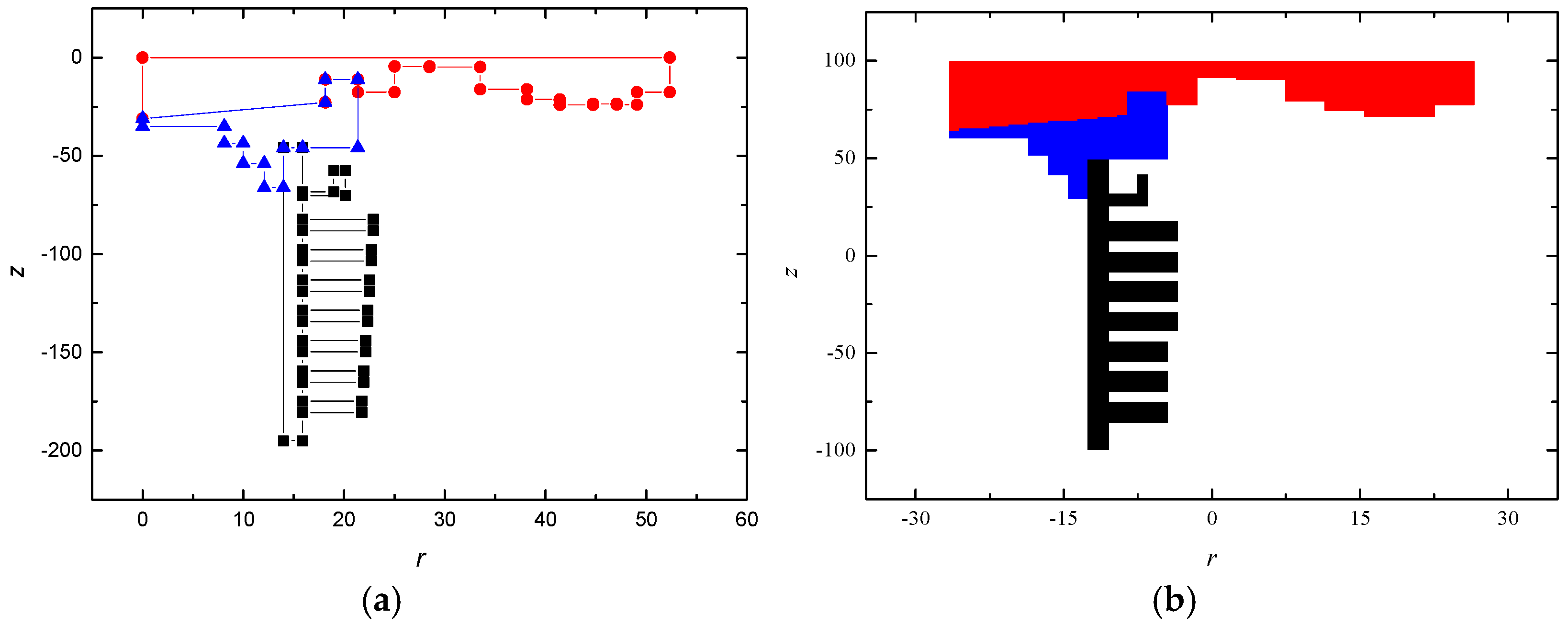
3.2.2. The Projection Intersection Method for Fast Modeling of Complex 2D Rotationally Symmetric Targets
3.3. Validation of the Adaptability of the Modeling Approach for Multi-Medium Situations
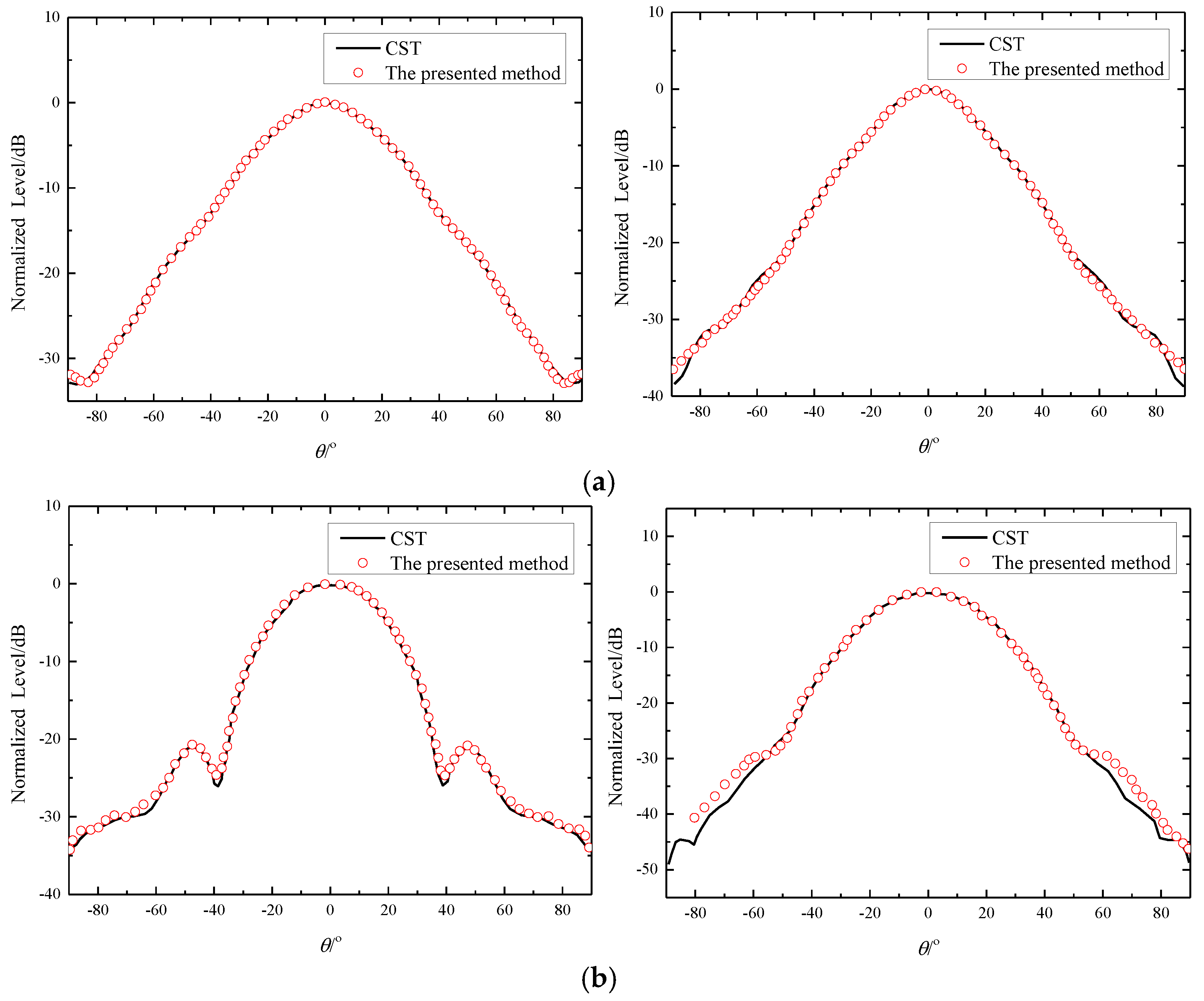
4. Method Efficiency and Correctness Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ozdemir, C.; Yilmaz, B.; Keceli, S.I.; Lezki, H.; Sutcuoglu, O. Ultra Wide Band horn antenna design for Ground Penetrating Radar: A feeder practice. In Proceedings of the 2014 15th International Radar Symposium (IRS), Gdansk, Poland, 16–18 June 2014; pp. 1–4. [Google Scholar]
- Pliushch, O.; Kravchenko, Y.; Zhurakovskyi, B.; Savchenko, A.; Tyshchenko, M.; Salkutsan, S. Studying antenna-feeder matching effects with help of computer simulation model. In Proceedings of the 2022 IEEE 4th International Conference on Advanced Trends in Information Theory (ATIT), Kyiv, Ukraine, 15–17 December 2022; pp. 259–263. [Google Scholar]
- Ridho, S.; Apriono, C.; Yuli Zulkifli, F.; Tjipto Rahardjo, E. Design of corrugated horn antenna with wire medium addition as parabolic feeder for Ku-band Very Small Aperture Terminal (VSAT) application. In Proceedings of the 2020 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET), Tangerang, Indonesia, 18–20 November 2020; pp. 163–166. [Google Scholar]
- Jacobs, O.B.; Odendaal, J.W.; Joubert, J. Elliptically shaped quad-ridge horn antennas as feed for a reflector. IEEE Antennas Wireless Propag. Lett. 2011, 10, 756–759. [Google Scholar] [CrossRef]
- Thomas, B. A review of the early developments of circular-aperture hybrid-mode corrugated horns. IEEE Trans. Antennas Propag. 1986, 34, 930–935. [Google Scholar] [CrossRef]
- Rieter, J.M.; Arndt, F. Efficient hybrid boundary contour mode-matching technique for the accurate full-wave analysis of circular horn antennas including the outer wall geometry. IEEE Trans. Antennas Propag. 1997, 45, 568–570. [Google Scholar] [CrossRef]
- Adam, J.-P.; Romier, M. Design approach for multiband horn antennas mixing multimode and hybrid mode operation. IEEE Trans. Antennas Propag. 2017, 65, 358–364. [Google Scholar] [CrossRef]
- Chinn, G.C.; Epp, L.W.; Hoppe, J.D. A hybrid finite-element method for axisymmetric waveguide-fed horns. IEEE Trans. Antennas Propag. 1996, 44, 280–285. [Google Scholar] [CrossRef]
- Venkatarayalu, N.V.; Chen, C.-C.; Teixeira, F.L.; Lee, R. Numerical modeling of ultrawide-band dielectric horn antennas using FDTD. IEEE Trans. Antennas Propag. 2004, 52, 1318–1323. [Google Scholar] [CrossRef]
- Zang, S.R.; Bergmann, J.R. Analysis of omnidirectional dual-reflector antenna and feeding horn using method of moments. IEEE Trans. Antennas Propag. 2014, 62, 1534–1538. [Google Scholar] [CrossRef]
- Chen, Y.; Mittra, R.; Harms, P. Finite-difference Time-domain algorithm for solving Maxwell’s equations in rotationally symmetric geometries. IEEE Trans. Microw. Theory Tech. 1996, 44, 832–839. [Google Scholar] [CrossRef]
- Rolland, A.; Ettorre, M.; Drissi, M.; Coq, L.L.; Sauleau, R. Optimization of reduced-size smooth-walled conical horns using bor-FDTD and genetic algorithm. IEEE Trans. Antennas Propag. 2010, 58, 3094–3100. [Google Scholar] [CrossRef]
- Wang, Y.-G.; Chen, B.; Chen, H.-L.; Xiong, R. An unconditionally stable one-step leapfrog ADI-BOR-FDTD method. IEEE Antennas Wireless Propag. Lett. 2013, 12, 647–650. [Google Scholar] [CrossRef]
- Shenton, D.; Cendes, Z. Three-Dimensional finite element mesh generation using delaunay tesselation. IEEE Trans. Magn. 1985, 21, 2535–2538. [Google Scholar] [CrossRef]
- Elshakhs, Y.S.; Deliparaschos, K.M.; Charalambous, T.; Oliva, G.; Zolotas, A. A Comprehensive Survey on Delaunay Triangulation: Applications, Algorithms, and Implementations Over CPUs, GPUs, and FPGAs. IEEE Access 2024, 12, 12562–12585. [Google Scholar] [CrossRef]
- Shinan, Z.; Jiachuan, Y.; Jun, P. Research on algorithm of target triangles fast locating in Delaunay triangulation. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 802–805. [Google Scholar]
- Su, T.; Liu, Y.J.; Yu, W.H.; Mittra, R. A conformal mesh-generating technique for the conformal finite-difference time-domain (CFDTD) method. IEEE Antennas Propag. Mag. 2004, 46, 37–49. [Google Scholar]
- Zhong, B.; Feng, J.; Fang, M.; Huang, Z. A structured meshing approach for FDTD method. In Proceedings of the 2024 IEEE 7th International Conference on Electronic Information and Communication Technology (ICEICT), Xi’an, China, 31 July–2 August 2024; pp. 1232–1235. [Google Scholar]
- Srisukh, Y.; Nehrbass, J.; Teixeira, F.L.; Lee, R. An approach for automatic grid generation in three-dimensional FDTD simulation of complex geometries. IEEE Antennas Propag. Mag. 2002, 44, 75–80. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Computing Region | Method | Calculation Time/s | Speed Ratio (Presented Method /MATLAB) |
|---|---|---|---|
| Presented method | 0.004797 | 6.78% | |
| Built-in functions of MATLAB | 0.070717 | ||
| Presented method | 0.014652 | 2.6% | |
| Built-in functions of MATLAB | 0.554065 |
| Frequency/GHz | Calculation Time Consumed by Presented Method/s | Calculation Time Consumed by CST/s | Speed Ratio (Presented Method/CST) |
|---|---|---|---|
| 18.2 | 72.4 | 231 | 31.3% |
| 28 | 63.7 | 247 | 25.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; He, X.; Wei, B. A Fast Modeling Method for BOR–FDTD. Electronics 2024, 13, 4814. https://doi.org/10.3390/electronics13234814
Chen M, He X, Wei B. A Fast Modeling Method for BOR–FDTD. Electronics. 2024; 13(23):4814. https://doi.org/10.3390/electronics13234814
Chicago/Turabian StyleChen, Meng, Xinbo He, and Bing Wei. 2024. "A Fast Modeling Method for BOR–FDTD" Electronics 13, no. 23: 4814. https://doi.org/10.3390/electronics13234814
APA StyleChen, M., He, X., & Wei, B. (2024). A Fast Modeling Method for BOR–FDTD. Electronics, 13(23), 4814. https://doi.org/10.3390/electronics13234814