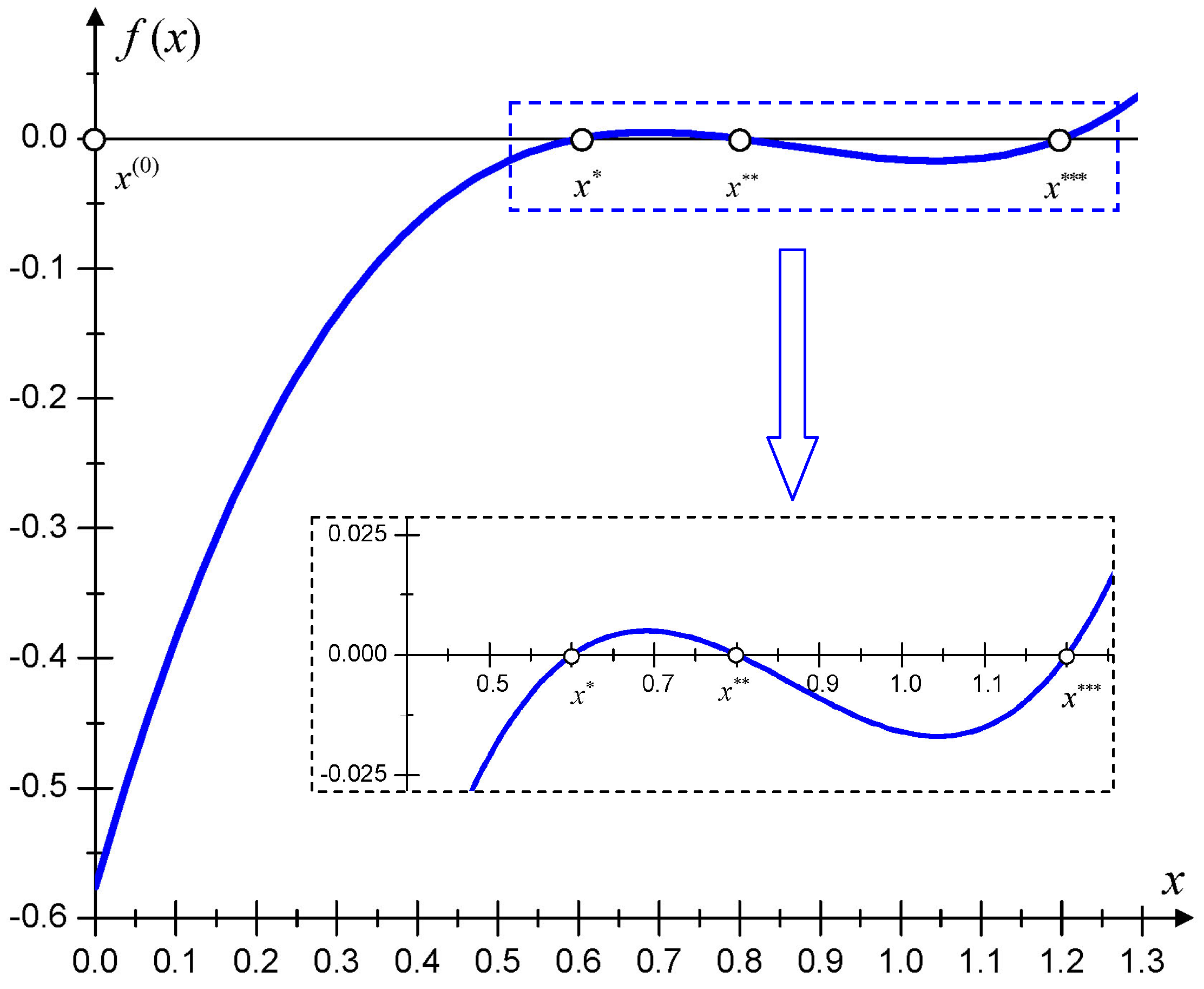
Figure 1.
Plot of nonlinear function (
10) having three roots (
,
, and
) and an enlarged part of the plot covering the solutions.
Figure 1.
Plot of nonlinear function (
10) having three roots (
,
, and
) and an enlarged part of the plot covering the solutions.
Figure 2.
Illustration of founding solutions (, , and ) to the scalar nonlinear equation in variant . (a) Determination of the solution . (b) Determination of the solution . (c) Determination of the solution . (d) Divergent process.
Figure 2.
Illustration of founding solutions (, , and ) to the scalar nonlinear equation in variant . (a) Determination of the solution . (b) Determination of the solution . (c) Determination of the solution . (d) Divergent process.
Figure 3.
Flowchart of the proposed deflation method.
Figure 3.
Flowchart of the proposed deflation method.
Figure 4.
Preamplifier—circuit diagram (a) and practical realization (b). Note: numbers in circles indicate node numbers, and numbers next to squares indicate IC pinout.
Figure 4.
Preamplifier—circuit diagram (a) and practical realization (b). Note: numbers in circles indicate node numbers, and numbers next to squares indicate IC pinout.
Figure 5.
Amplifier using a transistor array CA3083 (Intersil Coorporation, Melbourne, FL, USA). Note: numbers in circles indicate node numbers, and numbers next to squares indicate IC pinout.
Figure 5.
Amplifier using a transistor array CA3083 (Intersil Coorporation, Melbourne, FL, USA). Note: numbers in circles indicate node numbers, and numbers next to squares indicate IC pinout.
Figure 6.
Differential amplifier designed in CMOS technology. Note: numbers in circles indicate node numbers.
Figure 6.
Differential amplifier designed in CMOS technology. Note: numbers in circles indicate node numbers.
Figure 7.
Photo of the laboratory bench during the testing of the circuit shown in
Figure 4.
Figure 7.
Photo of the laboratory bench during the testing of the circuit shown in
Figure 4.
Figure 8.
SPICE simulation results for the solutions given in
Table 3, variant A (the measured quantities marked).
Figure 8.
SPICE simulation results for the solutions given in
Table 3, variant A (the measured quantities marked).
Figure 9.
The number of cases for variants A and B for which multiple solutions were identified using D-NRM, S-NRM, and DM.
Figure 9.
The number of cases for variants A and B for which multiple solutions were identified using D-NRM, S-NRM, and DM.
Figure 10.
The percentage of processes converging to solution(s) and percentage of processes not converging for 1000 randomly selected initial guesses in D-NRM and S-NRM methods (value averaged over all cases considered in the examples). (a) Example 1. (b) Example 2—Test 1. (c) Example 3.
Figure 10.
The percentage of processes converging to solution(s) and percentage of processes not converging for 1000 randomly selected initial guesses in D-NRM and S-NRM methods (value averaged over all cases considered in the examples). (a) Example 1. (b) Example 2—Test 1. (c) Example 3.
Table 1.
Results of calculations using different Newton–Raphson methods.
Table 1.
Results of calculations using different Newton–Raphson methods.
| | Percentage of Draws Resulting in the Solution |
|---|
| Solution | S-NRM | D-NRM | S-NRM | D-NRM |
|---|
| | (a) | (a) | (b) | (b) |
|---|
| 0.6 | 100% | 100% | 50.3% | 97.1% |
| 0.8 | 0 | 0 | 49.7% | 0.26% |
| 1.2 | 0 | 0 | 0 | 0.03% |
Table 2.
Results of calculations using DT.
Table 2.
Results of calculations using DT.
| | Subsequent Solutions @ Number of Iterations |
|---|
| Step | DT S-NRM | DT D-NRM | DT S-NRM | DT D-NRM |
|---|
| | () | () | () | () |
|---|
| 1 | 0.6 @ 7 | 0.6 @ 13 | 0.6 @ 2 | 0.8 @ 10 |
| 2 | 0.8 @ 5 | 0.8 @ 12 | 1.2 @ 22 | 1.2 @ 10 |
| 3 | 1.2 @ 2 | 1.2 @ 10 | 0.8 @ 2 | 0.6 @ 10 |
| 4 | divergence | divergence | divergence | divergence |
Table 3.
The results of identification—case 1. Assumed values of parameters: , , , , , , .
Table 3.
The results of identification—case 1. Assumed values of parameters: , , , , , , .
| Variant | Solutions | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
|---|
| A | 265.00 | 21.60 | 39.00 | 6.89 | 2.62 | 273 | 261 | 83.5 | 41.9 | 1.1 | 9.4 | 7.1 |
| | 28.67 | 36.81 | 3.84 | 11.34 | 2.83 | 307 | 261 | 4.0 | 0.4 | | | |
| B | 267.93 | 21.70 | 39.39 | 6.92 | 2.62 | 273 | 261 | 83.1 | 45.6 | 1.2 | 8.5 | 6.9 |
| | 28.82 | 36.99 | 3.86 | 11.39 | 2.82 | 307 | 261 | 4.6 | 0.1 | | | |
| C | 263.96 | 21.30 | 38.48 | 6.71 | 2.62 | 278 | 261 | 83.6 | 42.4 | 1.1 | 8.1 | 7.4 |
| | 28.10 | 36.71 | 3.73 | 11.16 | 2.83 | 312 | 261 | 5.0 | 0.2 | | | |
Table 4.
The results of identification—-case 2. Assumed values of parameters: , , , , , , .
Table 4.
The results of identification—-case 2. Assumed values of parameters: , , , , , , .
| Variant | Solution(s) | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
|---|
| A | 330.00 | 21.60 | 42.20 | 6.89 | 2.62 | 100 | 261 | 75.8 | 40.5 | 0.5 | 9.7 | 7.3 |
| | 26.86 | 39.32 | 3.05 | 12.02 | 2.85 | 137 | 261 | 6.7 | 0.1 | | | |
| B | 337.93 | 21.50 | 43.26 | 6.86 | 2.62 | 100 | 261 | 76.9 | 45.6 | 1.1 | 9.7 | 6.9 |
| | 26.26 | 39.86 | 2.97 | 12.17 | 2.86 | 138 | 261 | 5.7 | 0.1 | | | |
| C | 331.19 | 20.75 | 42.75 | 6.66 | 2.63 | 96.5 | 261 | 79.6 | 38.1 | 1.2 | 7.8 | 8.4 |
| | 24.44 | 39.80 | 2.78 | 12.20 | 2.89 | 136 | 261 | 5.0 | 0.0 (2) | | | |
Table 5.
The results of identification—case 3. Assumed values of parameters: , , , , , , .
Table 5.
The results of identification—case 3. Assumed values of parameters: , , , , , , .
| Variant | Solution | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
|---|
| A | 265.00 | 10.00 | 42.20 | 6.89 | 2.62 | 273 | 390 | 78.1 | 30.8 | 1.1 | 20.7 | 8.3 |
| B | 269.18 | 9.96 | 42.93 | 6.86 | 2.62 | 273 | 390 | 79.0 | 31.2 | 1.1 | 19.6 | 8.4 |
| C | 270.01 | 9.75 | 43.02 | 6.69 | 2.62 | 273 | 390 | 79.7 | 30.1 | 1.2 | 14.7 | 8.6 |
Table 6.
The results of identification. Test 1. Case 1: , , , , , . Case 2: , , , , , . Case 3: , , , , , .
Table 6.
The results of identification. Test 1. Case 1: , , , , , . Case 2: , , , , , . Case 3: , , , , , .
| Case | Solutions | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
|---|
| 1 | 7.593 | 6.225 | 389.5 | 388.9 | 85.4 | 69.7 | 1.3 | 86.9 | 32.0 |
| 2 | 7.593 | 5.067 | 270.5 | 510.0 | 4.3 | 4.6 | 1.6 | 9.7 | 59.2 |
| | 7.587 | 6.239 | 331.0 | 509.6 | 95.5 | 9.3 | | | |
| 3 | 8.496 | 7.967 | 268.9 | 388.7 | 96.3 | 14.7 | 1.0 | 9.0 | 27.8 |
| | 8.510 | 4.646 | 159.4 | 389.3 | 3.7 | 0.9 | | | |
Table 7.
The results of identification. Test 2. Case 1, 2, and 3 the same as in
Table 6.
Table 7.
The results of identification. Test 2. Case 1, 2, and 3 the same as in
Table 6.
| Case | Variant | Solutions | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
| 1 | A | 7.593 | 6.199 | 389.4 | 388.8 | 87.9 | 60.1 | 2.0 | 14.9 | 23.2 |
| | B | 7.693 | 6.271 | 394.3 | 394.4 | 87.1 | 59.2 | 2.0 | 10.2 | 19.8 |
| 2 | A | 7.593 | 5.058 | 270.0 | 510.0 | 89.1 | 48.2 | 1.7 | 12.0 | 22.0 |
| | B | 7.522 | 5.011 | 267.2 | 504.9 | 86.2 | 45.1 | 2.0 | 13.1 | 20.8 |
| 3 | A | 8.500 | 8.000 | 270.0 | 388.9 | 66.6 | 9.6 | 0.8 | 31.6 | 91.2 |
| | B | 8.389 | 7.894 | 266.2 | 383.2 | 62.9 | 7.4 | 0.7 | 47.2 | 80.0 |
Table 8.
The results of identification. Case 1: , , , , , all in Case 2: , , , , , all in Case 3: , , , , , all in .
Table 8.
The results of identification. Case 1: , , , , , all in Case 2: , , , , , all in Case 3: , , , , , all in .
| Case | Solutions | D-NRM (1) | S-NRM (1) | Time [s] |
|---|
|
|
|
|
| [%] | [%] | DM | D-NMR | S-NRM |
|---|
| 1 | 45.00 | 39.00 | 121.0 | 120.0 | 121.0 | 53.9 | 28.2 | 9.3 | 48.5 | 30.0 |
| | 6.17 | 15.55 | 19.57 | 53.27 | 23.86 | 21.8 | 0.0 (2) | | | |
| 2 | 53.29 | 33.08 | 121.7 | 120.2 | 121.6 | 20.8 | 9.9 | 8.5 | 142.8 | 25.7 |
| | 65.13 | 36.54 | 148.6 | 127.3 | 146.9 | 52.1 | 30.7 | | | |
| 3 | 40.97 | 38.99 | 120.9 | 149.9 | 134.9 | 51.2.8 | 30.8 | 7.8 | 91.0 | 26.5 |
| | 7.75 | 17.41 | 25.9 | 82.9 | 35.7 | 23.2 | 0.5 | | | |



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}