
Fault Location Method for Distribution Network Using an Additional Inductance Strategy

Abstract
1. Introduction
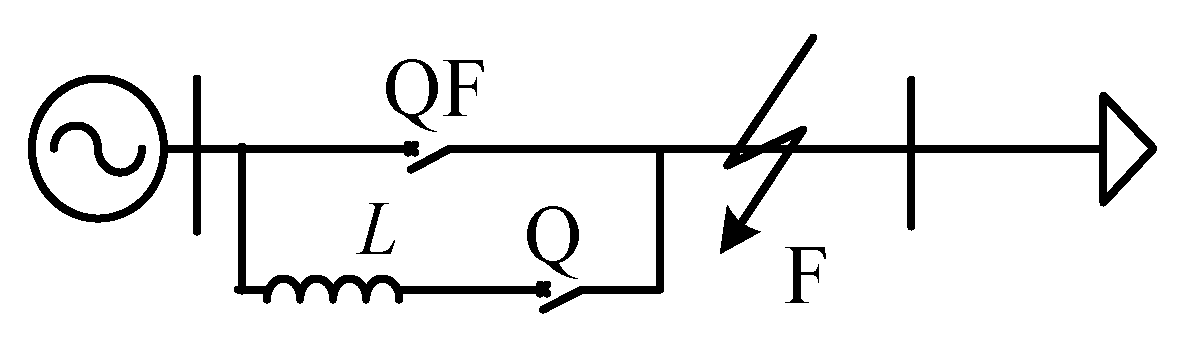
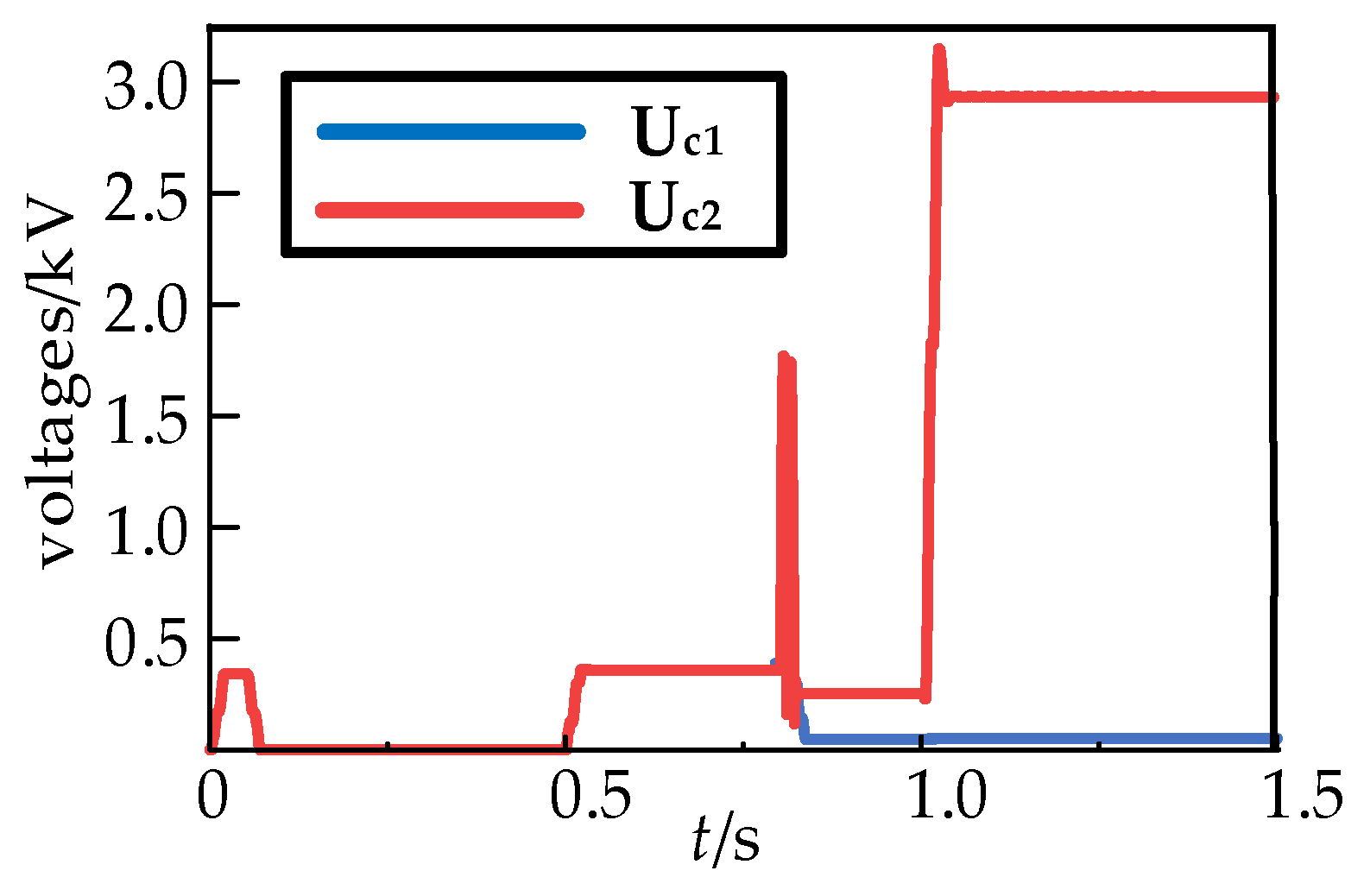
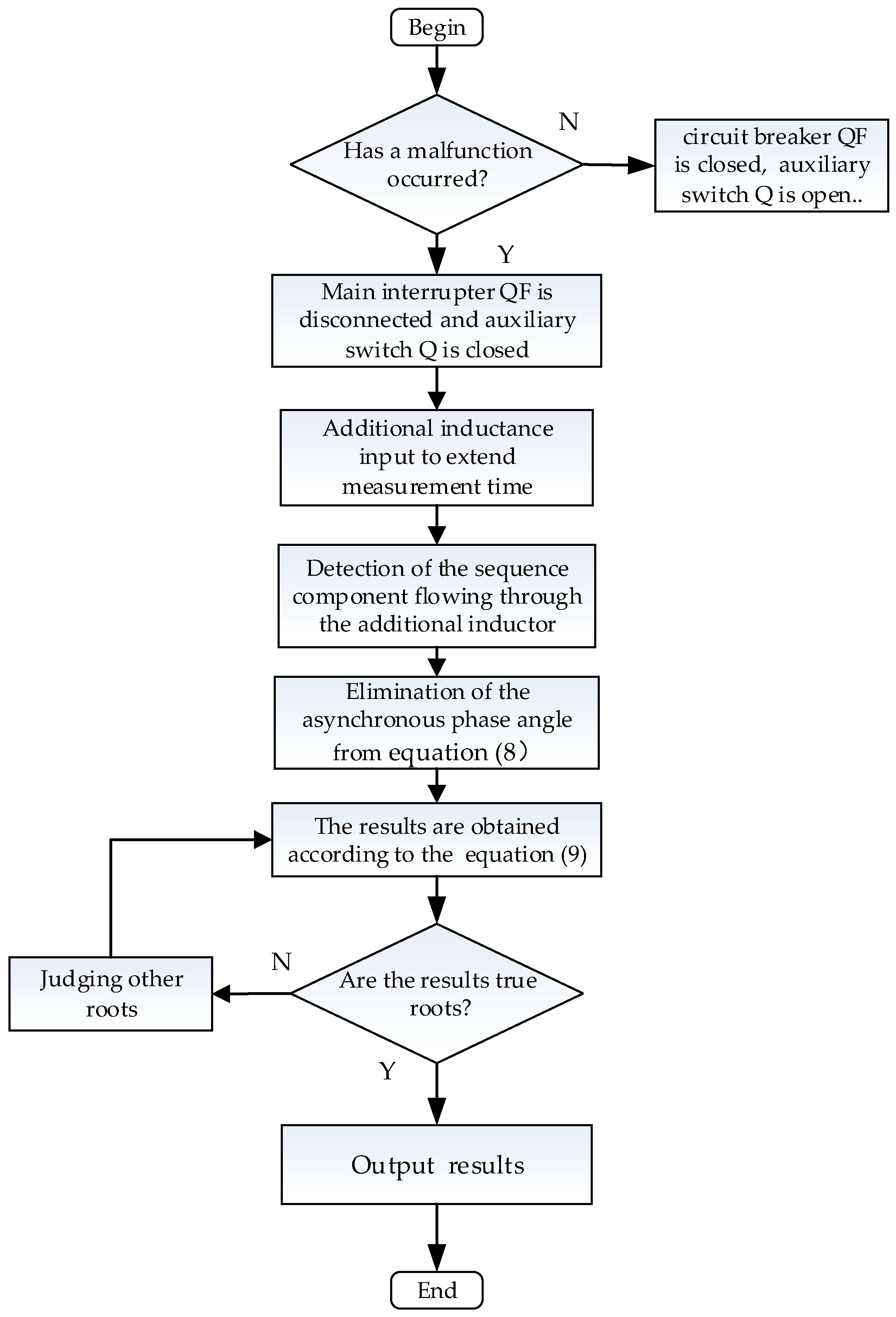
2. Additional Inductance Coordination Scheme
2.1. Strategy in Cooperation with Additional Inductance
2.2. Identify the Supplementary Inductance
2.3. Analysis of Coordinated Scheme Based on Additional Inductance
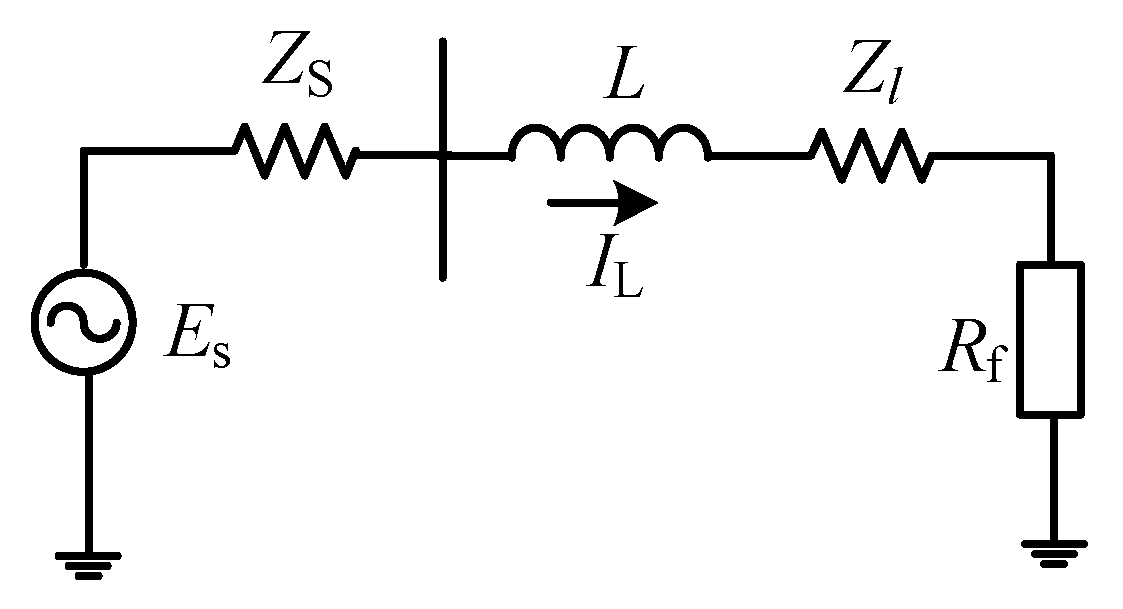
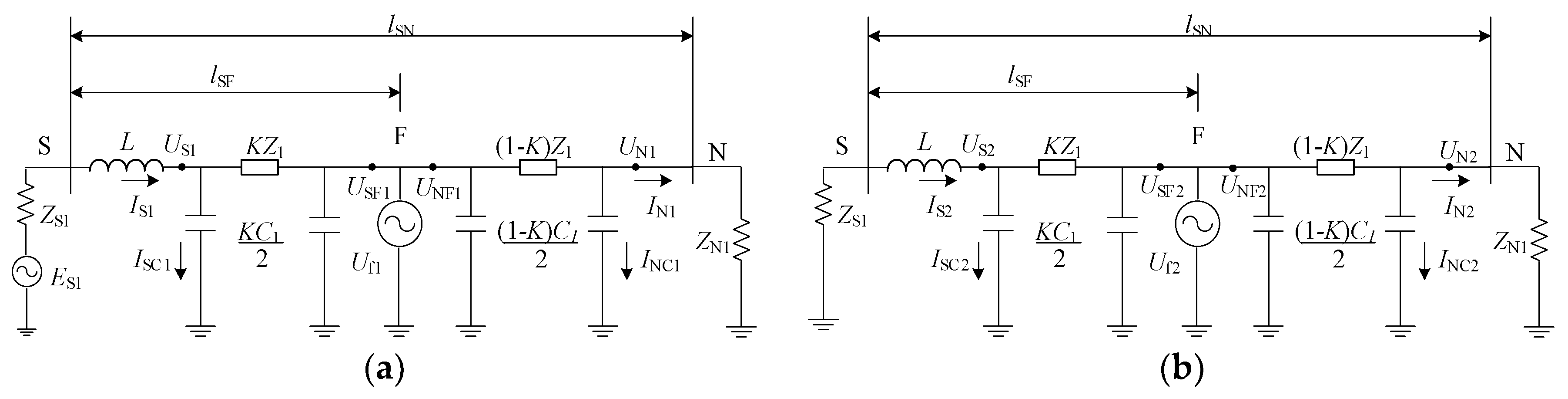
3. The Principle of Fault Location Method for Double-Ended Asynchronous Data
4. Simulation Analysis
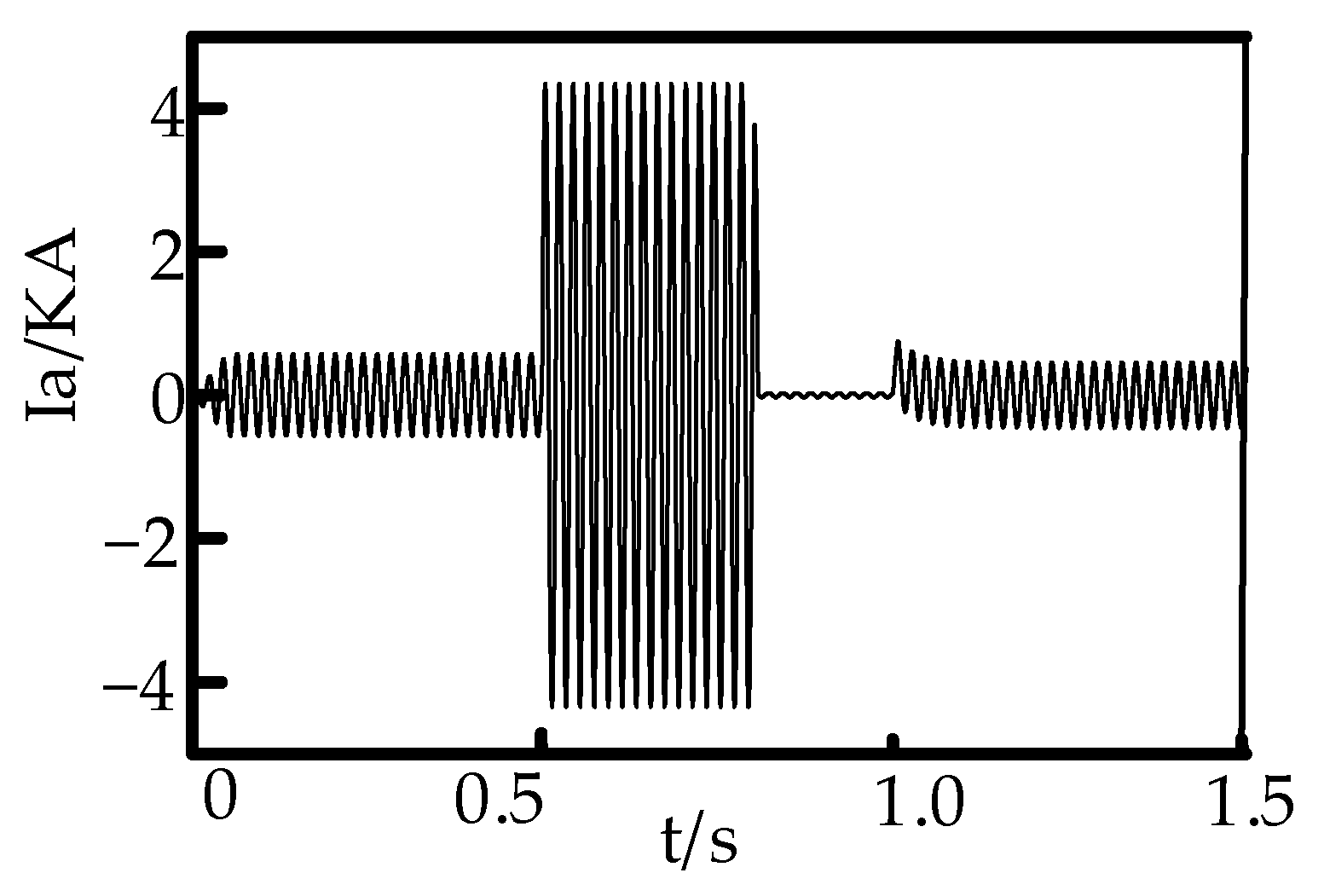
4.1. Analysis of the Impact of Fault Types and Fault Distances
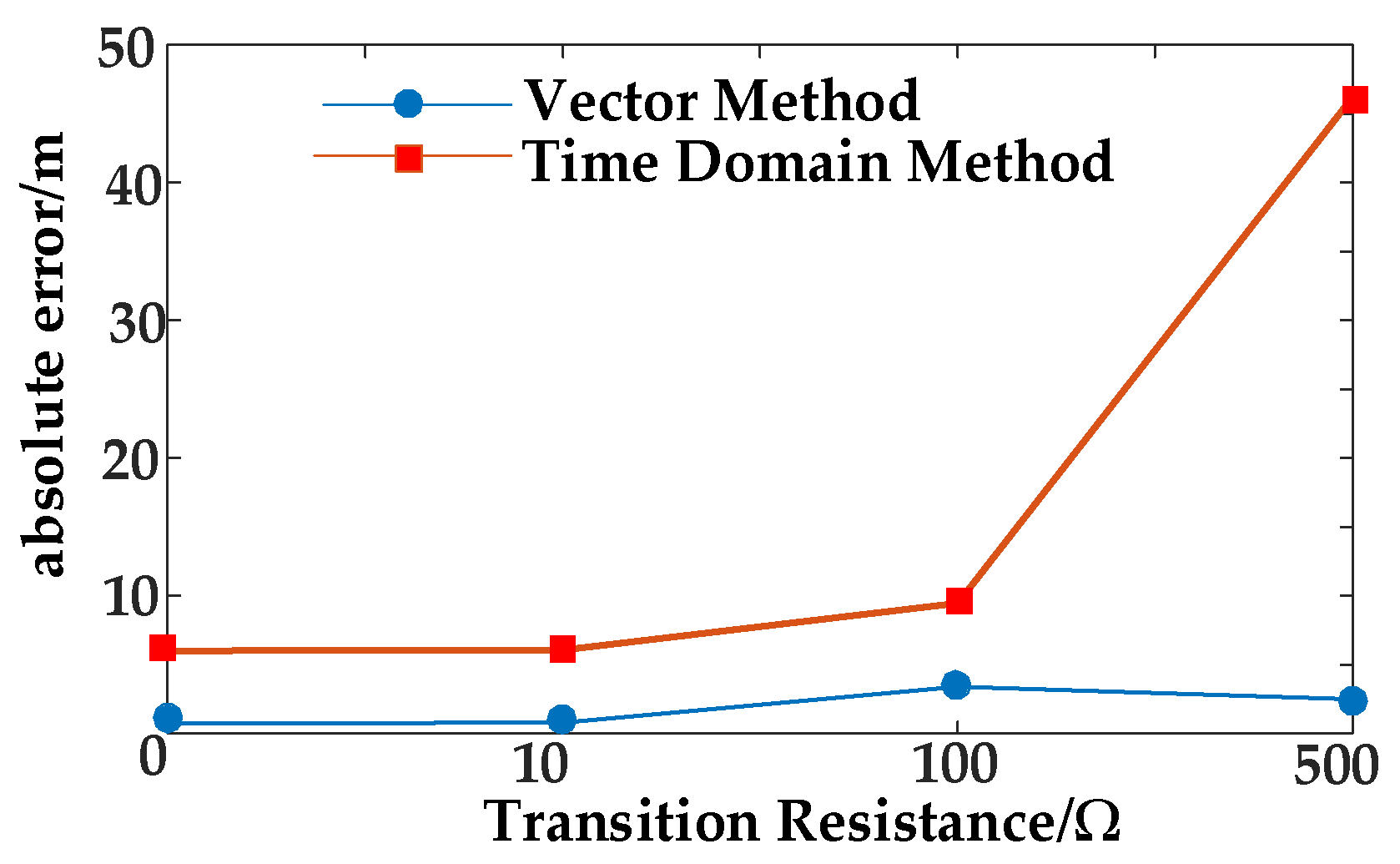
4.2. Analysis of the Impact of Transition Resistance
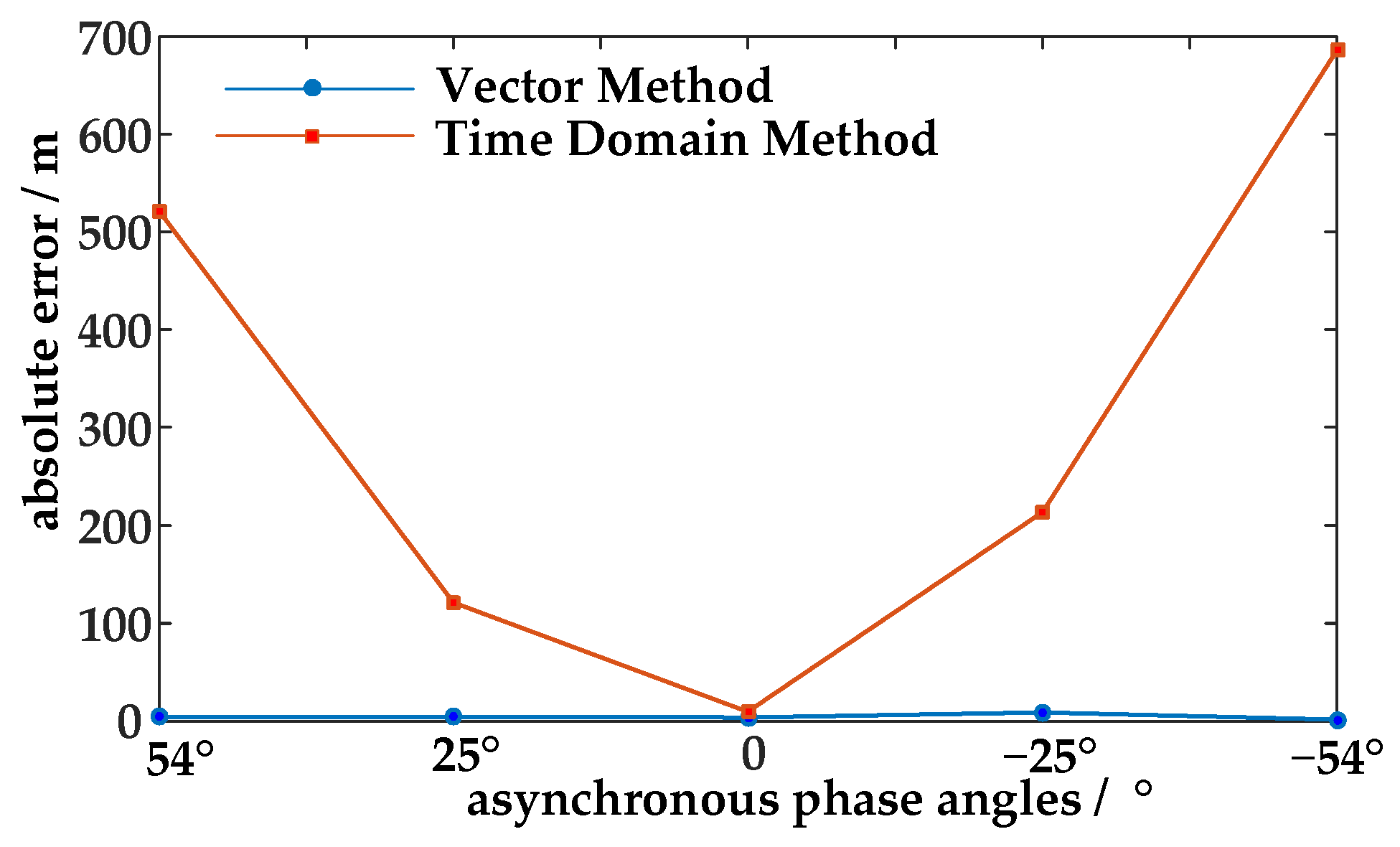
4.3. Analysis of the Impact of Asynchronous Phase Angle
5. Discussion
6. Conclusions
- This paper proposes a fault-handling strategy that involves the strategic placement of an additional inductor subsequent to the online circuit breaker. This serves to extend the PMU’s effective measurement period, consequently bolstering the stability and accuracy of phase measurements;
- The strategy effectively converts the time asynchrony between devices into differences in asynchronous phase angles. By employing the symmetrical component method to derive the positive and negative-sequence voltages of the faulty line, the method facilitates a comparative analysis at the line terminal, effectively neutralizing the asynchronous phase angles and, by extension, diminishing the impact of asynchronous timing on fault localization accuracy;
- The accuracy of the proposed method, within the confines of a single power source radial model, has been substantiated through simulation. The findings corroborate the method’s capability to surmount the constraints imposed by asynchronous timing and inadequate precision of phasor measurement devices on localization accuracy. For circular network applications, including radial configurations, the coordination of circuit breakers at either end may be imperative for the successful adoption of the strategy delineated in this paper—an aspect earmarked for future research exploration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, L.W.; Xue, Y.D.; Xu, B.Y.; Cai, Y.C.; Zhang, S.F. Research on effects of neutral grounding modes on power supply reliability in distribution networks. Power Syst. Technol. 2015, 39, 2340–2345. [Google Scholar]
- Cesar, G.; Ali, A. Fault location in active distribution networks containing distributed energy resources (DERs). IEEE Trans. Power Deliv. 2021, 36, 885–897. [Google Scholar]
- Yan, C.; Tao, L.; Wen, H.; Yao, Z.; Qing, X.; Hao, X.; Rui, L. Single-phase-to-earth fault location in distribution networks considering the distributed relations of the zero-sequence currents. Power Syst. Prot. Control. 2020, 48, 118–126. [Google Scholar]
- Qiao, J.; Yin, X.G.; Wang, Y.K.; Xu, W.; Tan, L.M. An accurate fault location method for distribution network based on active transfer arc-suppression device. Energy Rep. 2021, 7, 552–560. [Google Scholar] [CrossRef]
- He, J.H.; Zhang, M.; Luo, G.M.; Yu, B.; Hong, Z.Q. A fault location method for flexible dc distribution network based on fault transient process. Power Syst. Technol. 2017, 41, 985–991. [Google Scholar]
- Chen, X.; Jiao, Z.B. Accurate fault location method of distribution network with limited number of PMUs. In Proceedings of the China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018. [Google Scholar]
- Sadeh, J.; Bakhshizadeh, E.; Kazemzadeh, R. A new fault location algorithm for radial distribution systems using modal analysis. Int. J. Electr. Power Energy Syst. 2013, 45, 271–278. [Google Scholar] [CrossRef]
- Deng, F.; Zeng, X.; Pan, L. Research on multi-terminal travelling wave fault location method in complicated networks based on cloud computing. Prot. Control Mod. Power Syst. 2017, 2, 2–19. [Google Scholar] [CrossRef]
- Lin, F.; Zeng, H. One-terminal fault location of single-phase to earth fault based on distributed parameter model of HV transmission line. Power Syst. Technol. 2011, 35, 201–205. [Google Scholar]
- Wang, B.; Dong, X.; Lan, L. Novel location algorithm for single-line-to-ground faults in transmission line with distributed parameters. IET Gener. Transm. Distrib. 2013, 7, 560–566. [Google Scholar] [CrossRef]
- Wang, G.; Xu, Z.L.; Liang, Y.S.; Gong, C. Single terminal time domain fault location method based on the similarity of square wave for arc grounding fault. Power Syst. Prot. Control. 2012, 40, 109–113. [Google Scholar]
- Liang, J.F.; Jing, T.J.; Niu, H.N.; Wang, J.B. Two-Terminal Fault Location Method of Distribution Network Based on Adaptive Convolution Neural Network. IEEE Access 2020, 8, 54035–54043. [Google Scholar] [CrossRef]
- Zhang, K.; Zhu, Y.; Zheng, Y. A fault location method for multi-branch hybrid transmission lines based on redundancy parameter estimation. Power Syst. Technol. 2019, 43, 1034–1040. [Google Scholar]
- Zhang, X.; Xu, Y.; Wang, Y.; Sun, Q.; Wang, Z.; Sun, Y. A double-end fault ranging algorithm based on parameter detection. Power Syst. Prot. Control. 2011, 39, 106–111. [Google Scholar]
- Wu, T.; Chung, C.Y.; Kamwa, I.; Li, J.; Qin, M. Synchro phasor measurement-based fault location technique for multi-terminal multi-section non-homogeneous transmission lines. IET Gener. Transm Distrib. 2016, 10, 1815–1824. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Z.; Xia, P. Fault location algorithm for HV transmission lines based on samplings synchronized at both terminals by GPS. Guangdong Electr. Power. 2011, 24, 6–9. [Google Scholar]
- Ren, J.; Venkata, S.S.; Sortomme, E. An Accurate Synchrophasor Based Fault Location Method for Emerging Distribution Systems. IEEE Trans. Power Deliv. 2014, 29, 297–298. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H.; Dai, L.V.; Liu, Y. Novel Method for Identifying Fault Location of Mixed Lines. Energies 2018, 11, 1529. [Google Scholar] [CrossRef]
- Shi, S.; He, B. Two-terminal fault location algorithm using asynchronous phase based on distributed parameter model. Power Syst. Technol. 2008, 32, 84–88. [Google Scholar]
- Sun, G.; Chen, R.; Han, Z.; Liu, H.; Liu, M.; Zhang, K.; Xu, C.; Wang, Y. Accurate Fault Location Method Based on Time-Domain Information Estimation for Medium-Voltage Distribution Network. Electronics 2023, 12, 4733. [Google Scholar] [CrossRef]
- Deng, W.; Lu, L.; Shi, J.; Yao, Z.; Qing, X.; Hao, X.; Rui, L. A fault location method for hybrid lines based on two-terminal asynchronous data. Power Syst. Technol. 2021, 4, 1574–1580. [Google Scholar]
- Yang, Z.; Xie, C.; Yin, C. Fault Location Method for Distribution Lines Based on Coordination of Primary and Secondary Devices. In Proceedings of the 2023 IEEE International Conference on Advanced Power System Automation and Protection (APAP), Xuchang, China, 8–12 October 2023; pp. 226–229. [Google Scholar]
- Liu, J.; Zhang, Z.; Wu, S. Fault processing with coordination of primary equipments and secondary devices. Power Syst. Prot. Control. 2019, 47, 1–6. [Google Scholar]
- Zhang, H.; Tang, M.; Cheng, Z. A fast time domain fault location method for single phase to ground fault in distribution network. Power Syst. Prot. Control. 2018, 46, 24–30. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Category | Numerical Value (Positive Sequence) | Numerical Value (Zero Sequence) |
|---|---|---|
| resistive | 0.1700 Ω/km | 0.23 Ω/km |
| inductor | 1.2096 mH/km | 5.4749 mH/km |
| capacitor | 0.27 μF/km | 2.5 μF/km |
| Fault Location | Type of Fault | Vector Method | Time-Domain Method | ||
|---|---|---|---|---|---|
| Xe | Pe | Xe | Pe | ||
| 2 km | A-G | 2.7 m | 0.14% | 3.4 m | 0.17% |
| AB | 1.3 m | 0.07% | 1.2 m | 0.06% | |
| AB-G | 4.7 m | 0.23% | 1.1 m | 0.06% | |
| ABC | 6.5 m | 0.33% | 3.2 m | 0.16% | |
| 5 km | A-G | 8.2 m | 0.16% | 15.2 m | 0.31% |
| AB | 6.1 m | 0.12% | 18.2 m | 0.04% | |
| AB-G | 8.3 m | 0.16% | 10.5 m | 0.21% | |
| ABC | 11.8 m | 0.24% | 8.2 m | 0.11% | |
| 7 km | A-G | 8.1 m | 0.12% | 18.8 m | 0.27% |
| AB | 19.2 m | 0.27% | 5.5 m | 0.08% | |
| AB-G | 10.1 m | 0.14% | 6.2 m | 0.09% | |
| ABC | 25.5 m | 0.36% | 15.2 m | 0.22% | |
| Transition Resistance | Vector Method | Time-Domain Method | ||
|---|---|---|---|---|
| Xe | Pe | Xe | Pe | |
| 10 Ω | 0.8 m | 0.016% | 6.1 m | 0.12% |
| 100 Ω | 3.4 m | 0.068% | 9.5 m | 0.19% |
| 500 Ω | 2.5 m | 0.050% | 46.2 m | 0.92% |
| Asynchronous Phase Angles | Vector Method | Time-Domain Method | ||
|---|---|---|---|---|
| Xe | Pe | Xe | Pe | |
| 54° | 4.2 m | 0.084% | 521.5 m | 10.63% |
| 25° | 4.6 m | 0.092% | 121.5 m | 2.43% |
| 0° | 3.4 m | 0.068% | 9.5 m | 0.19% |
| −25° | 8.9 m | 0.178% | 213.8 m | 4.27% |
| −54° | 1.2 m | 0.024% | 686.2 m | 13.72% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Xie, C.; Yin, C. Fault Location Method for Distribution Network Using an Additional Inductance Strategy. Electronics 2024, 13, 712. https://doi.org/10.3390/electronics13040712
Yang Z, Xie C, Yin C. Fault Location Method for Distribution Network Using an Additional Inductance Strategy. Electronics. 2024; 13(4):712. https://doi.org/10.3390/electronics13040712
Chicago/Turabian StyleYang, Zonglei, Chao Xie, and Chunya Yin. 2024. "Fault Location Method for Distribution Network Using an Additional Inductance Strategy" Electronics 13, no. 4: 712. https://doi.org/10.3390/electronics13040712
APA StyleYang, Z., Xie, C., & Yin, C. (2024). Fault Location Method for Distribution Network Using an Additional Inductance Strategy. Electronics, 13(4), 712. https://doi.org/10.3390/electronics13040712