
UAV Swarm Centroid Tracking for Edge Computing Applications Using GRU-Assisted Multi-Model Filtering


Abstract
1. Introduction
- Firstly, we propose an approach for tracking the centroid of a UAV swarm by utilizing a 3D coordinate-coupled dynamic model. In this model, the control quantity is considered a random process, and an unscented Kalman filter is employed.
- Secondly, we introduce a novel GRU-based network that extracts features from position observations. This enables quick and accurate detection of the maneuvering mode. With the detected features, a multi-model filtering method is applied to track the UAV swarm’s centroid.
- Finally, we conduct simulations and experiments to validate the feasibility and superior performance of the proposed algorithm compared with traditional approaches.
2. Background Information
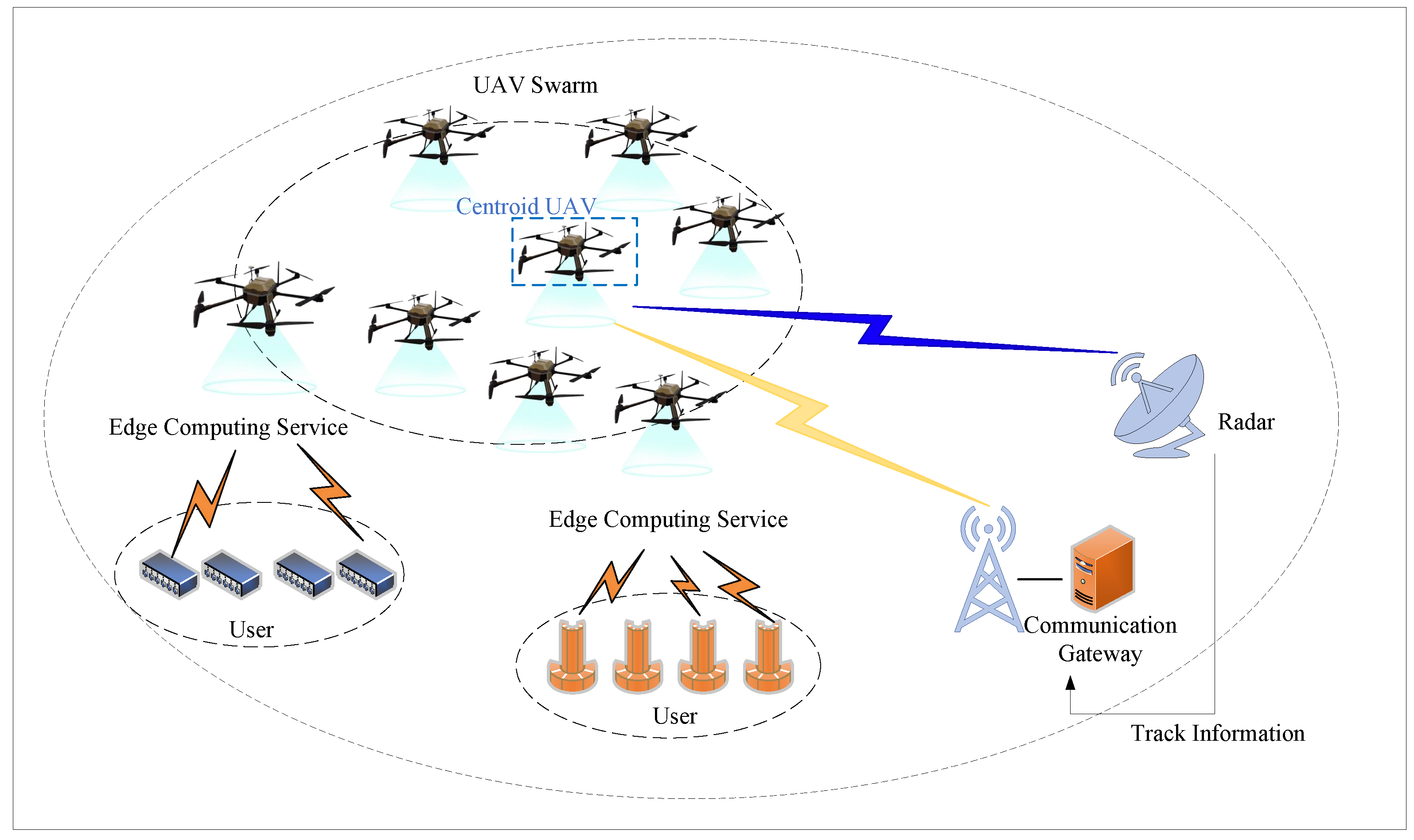
2.1. Centroid Tracking in UAV Swarm-Based Edge Computing
2.2. Stochastic Process Modeling of the Control Volume
2.3. Framework of the Proposed Tracking Method
3. The Centroid’s UKF with the Proposed 3D Coordinate-Coupled Dynamic Model
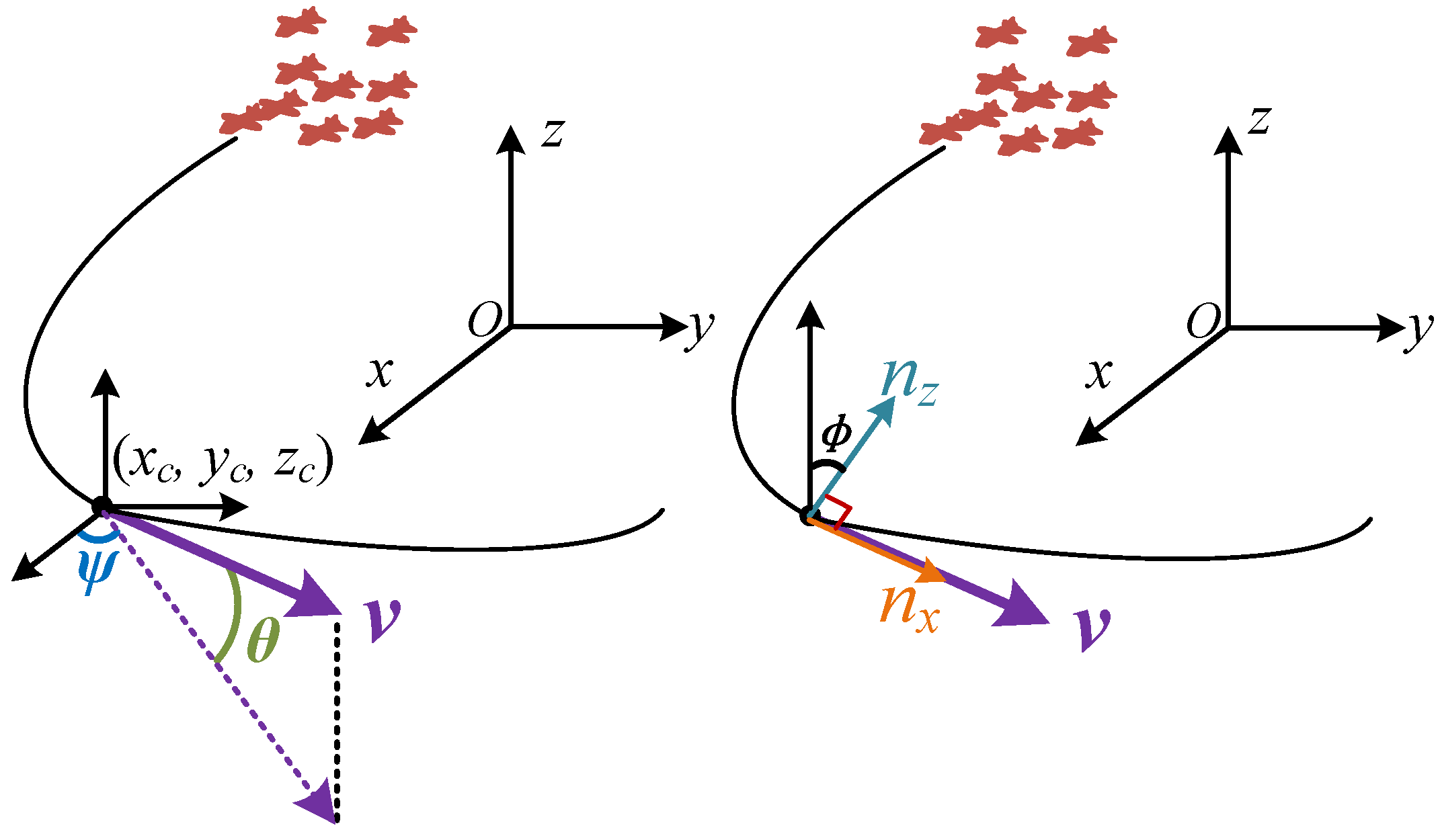
3.1. Modeling Description of the UAV Swarm’s Centroid
3.2. Nine-Dimensional UKF of the Centroid State
- Initialization
- Initialize the state estimate and the error covariance matrix . The initialization of can be expressed as shown in Equation (15):The initialization of the matrix follows as shown in Equation (16):where represents the estimated error of .
- Set the initial values for the process noise covariance matrix as shown in Equation (17) and the measurement noise covariance matrix :
- 2.
- Augmentation
- Augment the state vector with the process noise vector to form an augmented state vector as shown in Equation (18):
- Augment the state covariance matrix with the process noise covariance matrix to form an augmented covariance matrix as shown in Equation (19):
- 3.
- Sigma Point Generation
- Compute the weight coefficients of the sigma points. The mean weight coefficients follow as shown in Equations (20) and (21):where represents the dimension of the augmented state vector and is a tunable parameter typically set to . The covariance weight coefficients can be expressed as shown in Equations (22) and (23):where and are tunable parameters usually set to and 2, respectively.
- Generate sigma points from the augmented state vector and the corresponding covariance matrix using the unscented transformation as expressed in Equation (24):where denotes the ith column of a matrix and represents the square root of a matrix. By linearly transforming the augmented state vector and combining it with the weight coefficients, we obtain a set of sigma points that represent the state distribution.
- 4.
- State Prediction
- Propagate the sigma points through the nonlinear state transition function to obtain predicted sigma points as expressed in Equation (25):
- 5.
- Measurement Prediction
- Map the predicted sigma points through the measurement function to obtain the predicted measurement sigma points as expressed in Equation (28):
- 6.
- Update
- 7.
- Iterate
- Repeat steps 3–6 for each new measurement.
4. GRU-Assisted Multi-Model Filtering
4.1. Prior Knowledge
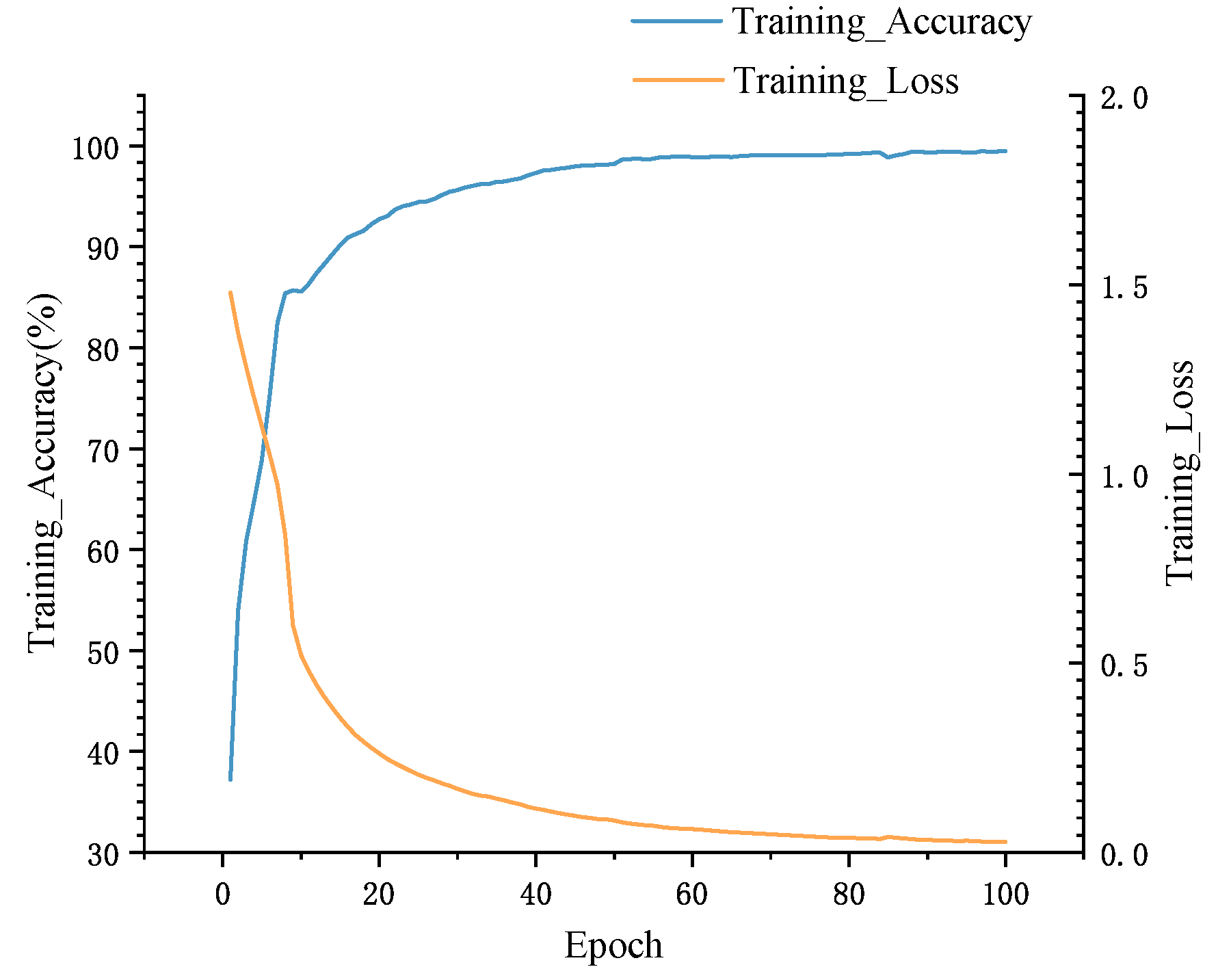
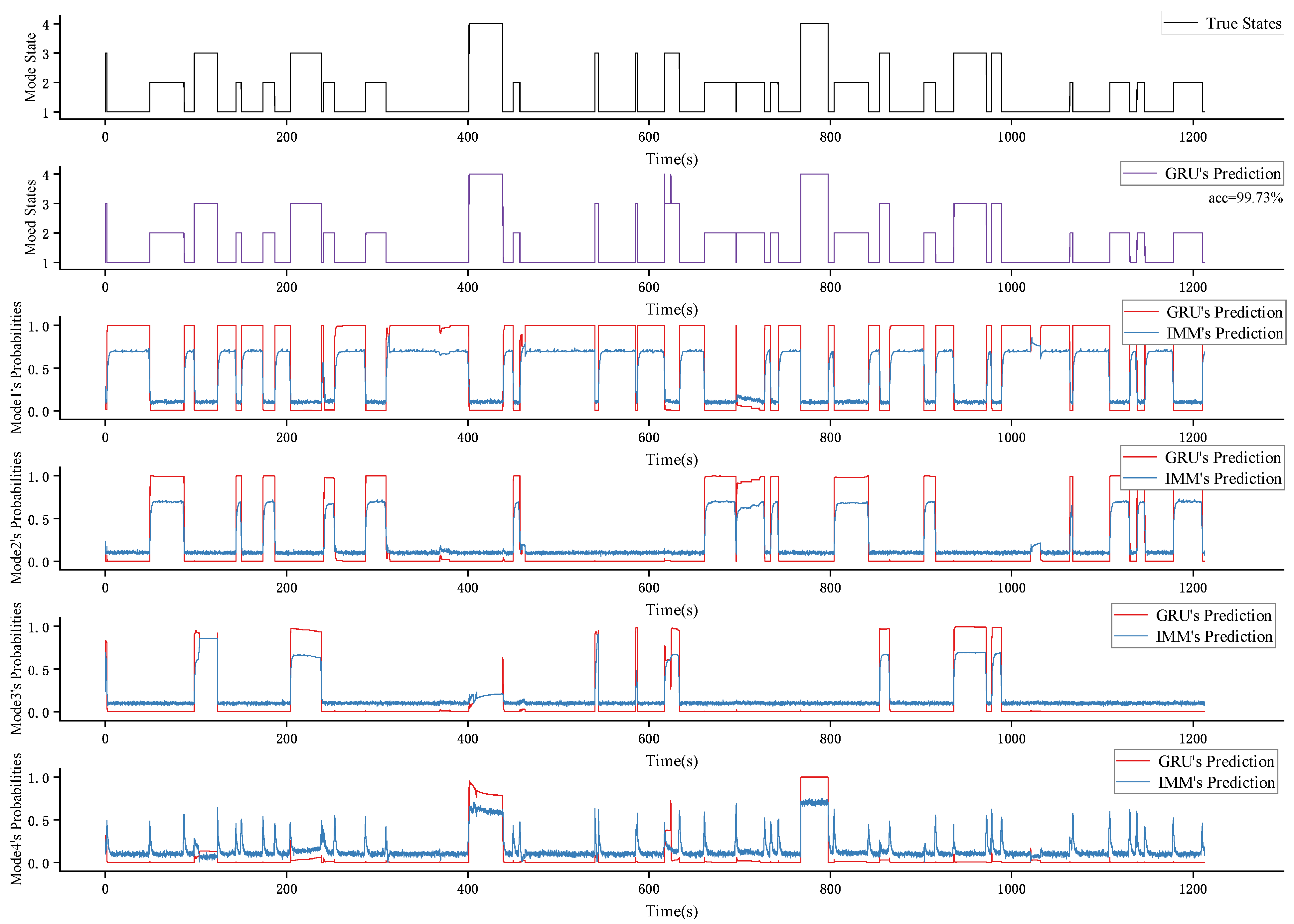
4.2. GRU-Based Maneuver Estimation Network
- (1)
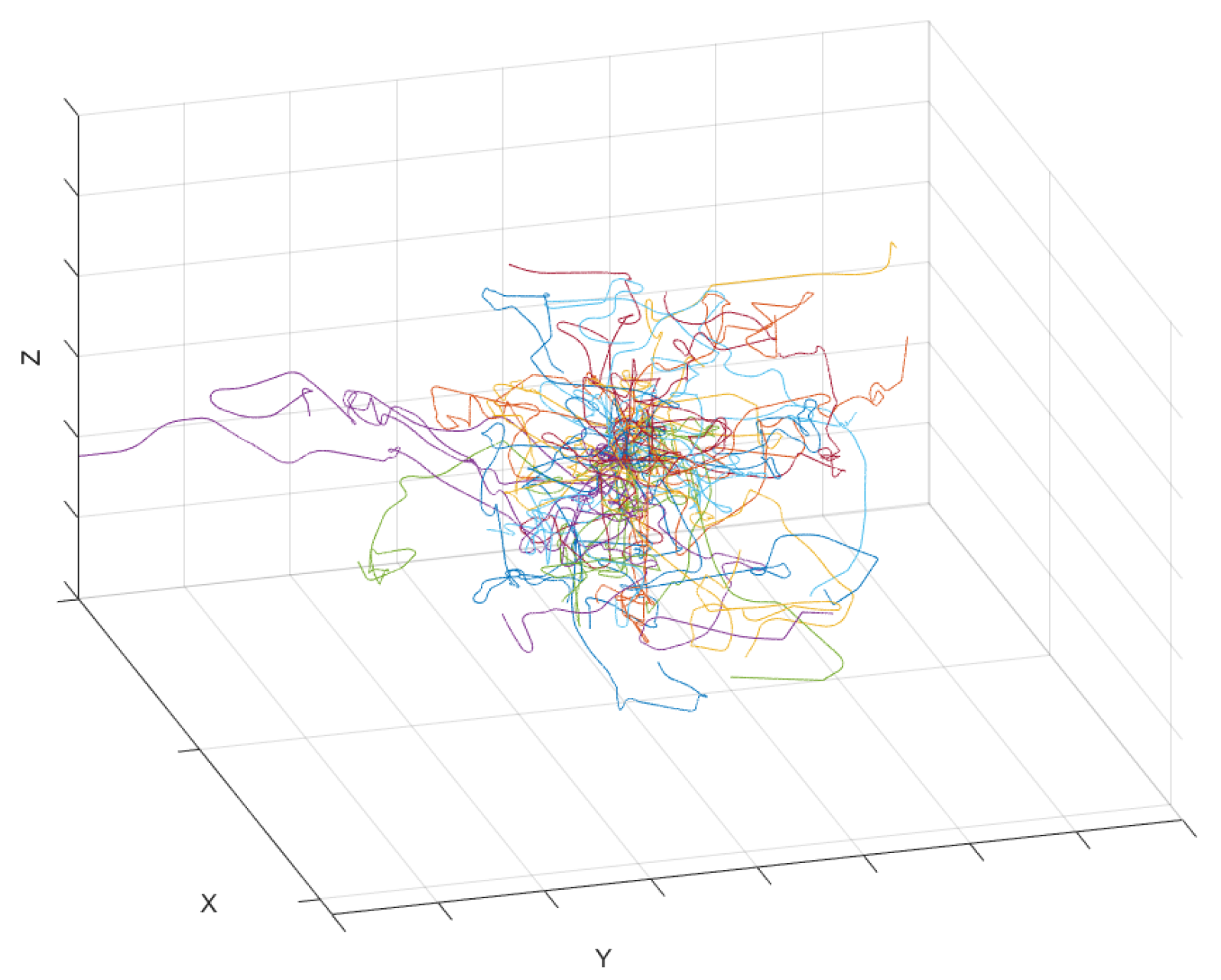
- Target generation: A swarm of UAV targets, separated by distances ranging from 5 to 7 m, was generated with their geometric center flying along a predefined trajectory.
- (2)
- Maneuver and trajectory simulation: The trajectory of the center was divided into several time segments of varying lengths, with each segment randomly corresponding to a maneuver type. The trajectory of the center was simulated based on the selected maneuver type, and the corresponding motion model label was assigned.
- (3)
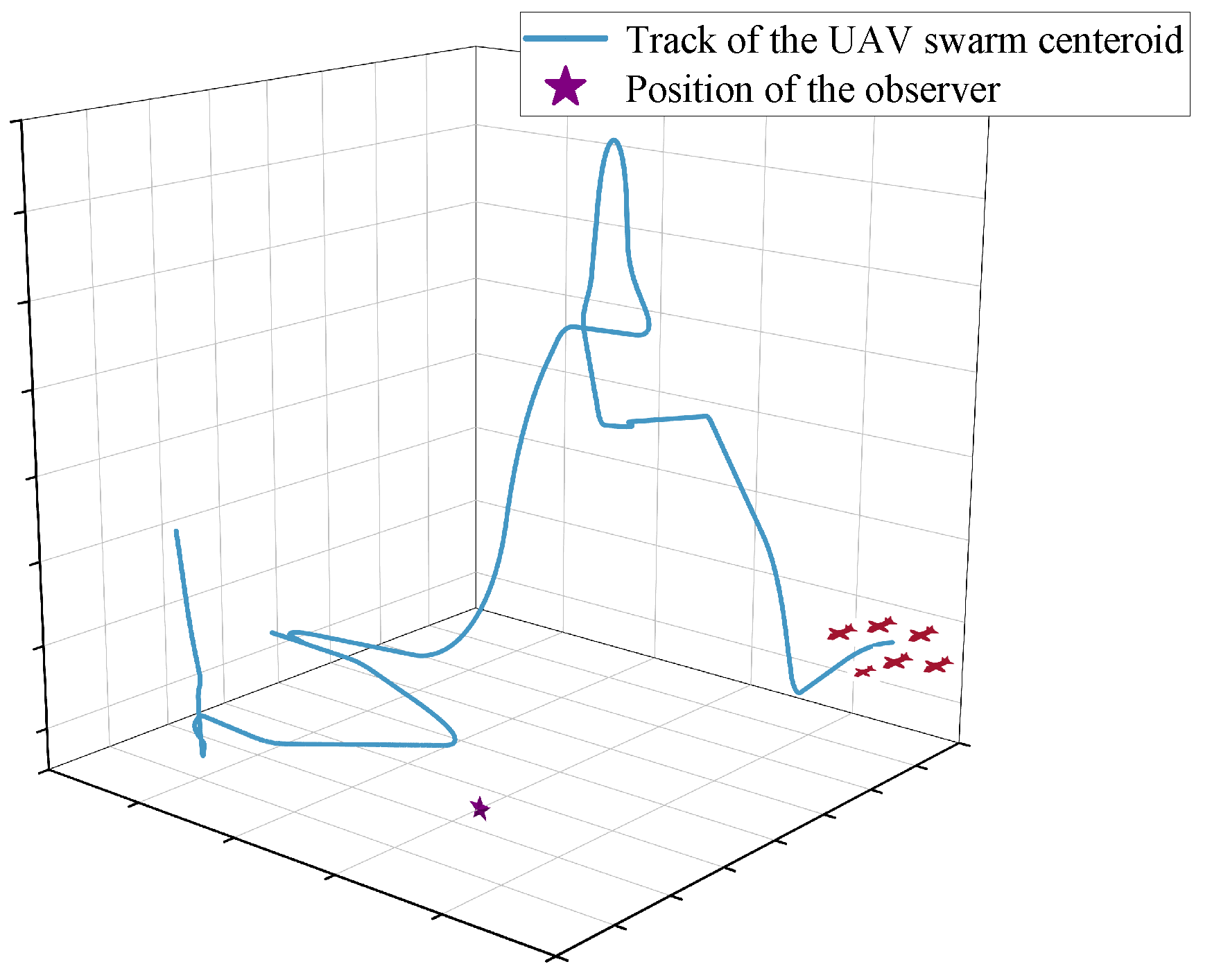
- Observation simulation: Observations of the swarm were simulated at a specific resolution, with an observation error having a standard deviation of 8 m along a single coordinate axis and an update frequency of 0.5 s. The centroid observation of the swarm was obtained by combining multiple measurements of the swarm using weighting.
4.3. Estimation Fusion
5. Simulation
5.1. Simulation Settings
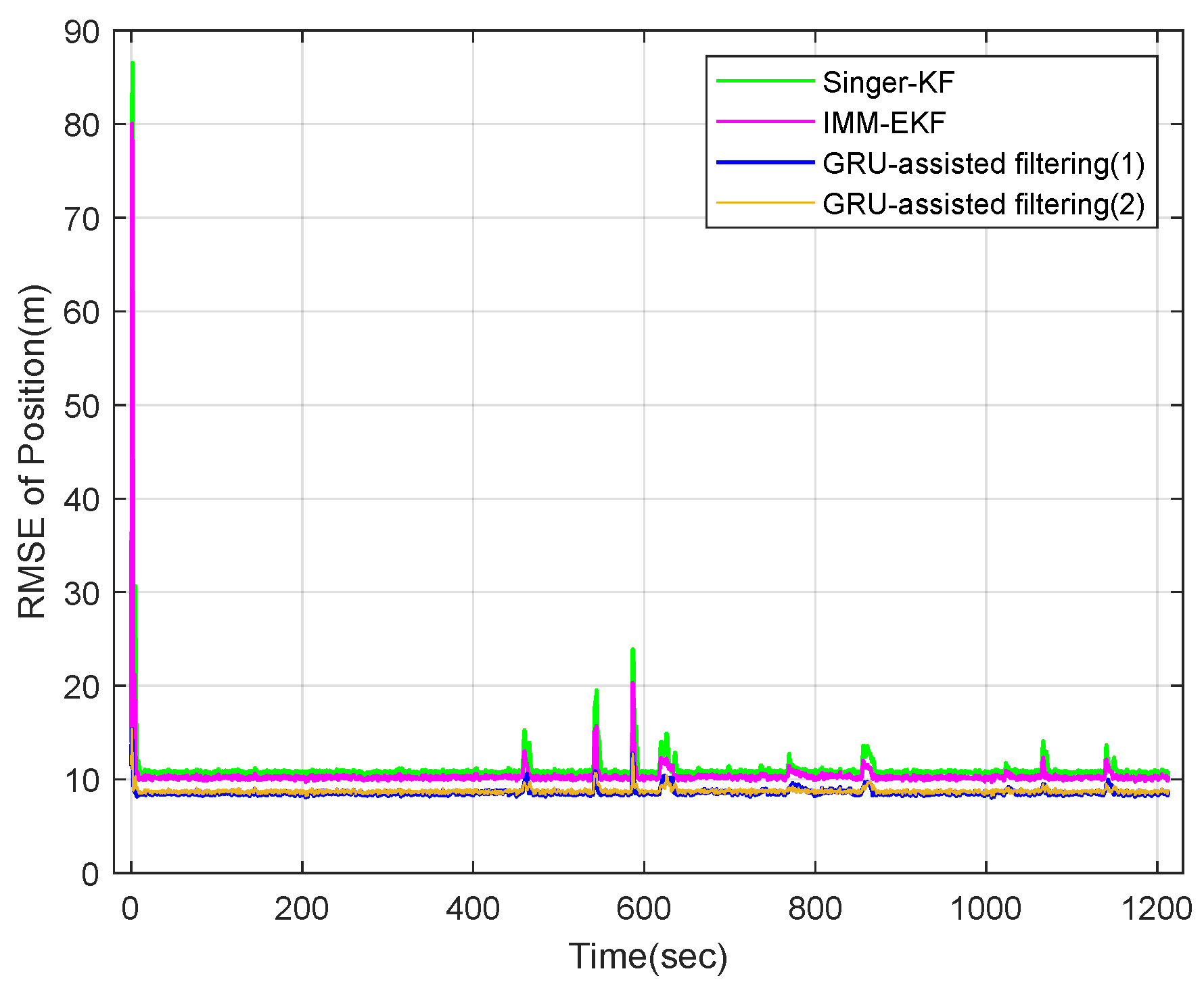
5.2. Simulation Results and Analysis
6. Experiments
6.1. Flight Experiments
6.2. Computational Complexity
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- China Mobile. White Paper on 3D Coverage Network for Unmanned Aerial Vehicles Based on 5G Communication Technology; Technical Report; China Mobile: Xiamen, China, 2021. [Google Scholar]
- Xu, X.; Zhang, F.; Zhao, Y. Unmanned Aerial Vehicle Path-Planning Method Based on Improved P-RRT* Algorithm. Electronics 2023, 12, 4576. [Google Scholar] [CrossRef]
- McEnroe, P.; Wang, S.; Liyanage, M. A survey on the convergence of edge computing and AI for UAVs: Opportunities and challenges. IEEE Internet Things J. 2022, 9, 15435–15459. [Google Scholar] [CrossRef]
- Wu, W.; Zhou, F.; Wang, B.; Wu, Q.; Dong, C.; Hu, R.Q. Unmanned aerial vehicle swarm-enabled edge computing: Potentials, promising technologies, and challenges. IEEE Wirel. Commun. 2022, 29, 78–85. [Google Scholar] [CrossRef]
- You, J.; Ye, Z.; Gu, J.; Pu, J. UAV-Pose: A Dual Capture Network Algorithm for Low Altitude UAV Attitude Detection and Tracking. IEEE Access 2023, 11, 129144–129155. [Google Scholar] [CrossRef]
- Jiang, N.; Wang, K.; Peng, X.; Yu, X.; Wang, Q.; Xing, J.; Li, G.; Guo, G.; Ye, Q.; Jiao, J.; et al. Anti-uav: A large-scale benchmark for vision-based uav tracking. IEEE Trans. Multimed. 2021, 25, 486–500. [Google Scholar] [CrossRef]
- Zhou, L.; Leng, S.; Wang, Q.; Liu, Q. Integrated sensing and communication in UAV swarms for cooperative multiple targets tracking. IEEE Trans. Mobile Comput. 2023, 22, 6526–6542. [Google Scholar] [CrossRef]
- Chen, Y.; Jiao, Y.; Wu, M.; Ma, H.; Lu, Z. Group Target Tracking for Highly Maneuverable Unmanned Aerial Vehicles Swarms: A Perspective. Sensors 2023, 23, 4465. [Google Scholar] [CrossRef]
- Mihaylova, L.; Carmi, A.Y.; Septier, F.; Gning, A.; Pang, S.K.; Godsill, S. Overview of Bayesian sequential Monte Carlo methods for group and extended object tracking. Digit. Signal Process. 2014, 25, 1–16. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Singer, R.A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1970, AES-6, 473–483. [Google Scholar] [CrossRef]
- Zhou, H.; Kumar, K. A’current’statistical model and adaptive algorithm for estimating maneuvering targets. J. Guid. Control Dyn. 1984, 7, 596–602. [Google Scholar] [CrossRef]
- Mehrotra, K.; Mahapatra, P.R. A jerk model for tracking highly maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1094–1105. [Google Scholar] [CrossRef]
- Semerdjiev, E.; Mihaylova, L.; Semerdjiev, T. Manoeuvring ship model identification and interacting multiple model tracking algorithm design. In Proceedings of the 1998 International Conference on Information Fusion, Las Vegas, NV, USA, 6–9 July 1998; pp. 968–973. [Google Scholar]
- Berg, R. Estimation and prediction for maneuvering target trajectories. IEEE Trans. Autom. Control 1983, 28, 294–304. [Google Scholar] [CrossRef]
- Bishop, R.H.; Antoulas, A. Nonlinear approach to aircraft tracking problem. J. Guid. Control Dyn. 1994, 17, 1124–1130. [Google Scholar] [CrossRef]
- Wang, C.; Yu, X.; Xu, L.; Wang, W. Energy efficient task scheduling based on traffic mapping in heterogeneous mobile edge computing: A green IoT perspective. IEEE Trans. Green Commun. Netw. 2023, 7, 972–982. [Google Scholar] [CrossRef]
- Wang, C.; Yu, X.; Xu, L.; Jiang, F.; Wang, W.; Cheng, X. QoS-aware offloading based on communication-computation resource coordination for 6G edge intelligence. China Commun. 2023, 20, 236–251. [Google Scholar] [CrossRef]
- Andrisani, D.; Kuhl, F.P.; Gleason, D. A nonlinear tracker using attitude measurements. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 533–539. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Lainiotis, D. Optimal adaptive estimation: Structure and parameter adaption. IEEE Trans. Autom. Control 1971, 16, 160–170. [Google Scholar] [CrossRef]
- Blom, H.A.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Estimation and Tracking-Principles, Techniques, and Software; Artech House, Inc.: Norwood, MA, USA, 1993. [Google Scholar]
- Li, X.R.; Bar-Shakm, Y. Mode-set adaptation in multiple-model estimators for hybrid systems. In Proceedings of the 1992 American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 1794–1799. [Google Scholar]
- Li, X.R.; Bar-Shalom, Y. Multiple-model estimation with variable structure. IEEE Trans. Autom. Control 1996, 41, 478–493. [Google Scholar]
- Wang, C.; Deng, D.; Xu, L.; Wang, W. Resource scheduling based on deep reinforcement learning in UAV assisted emergency communication networks. IEEE Trans. Commun. 2022, 70, 3834–3848. [Google Scholar] [CrossRef]
- Li, X.R.; Zwi, X.; Zwang, Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 225–241. [Google Scholar]
- Li, X.R.; Zhang, Y.; Zhi, X. Multiple-model estimation with variable structure. IV. Design and evaluation of model-group switching algorithm. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 242–254. [Google Scholar]
- Li, X.R.; Zhang, Y. Multiple-model estimation with variable structure. V. Likely-model set algorithm. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 448–466. [Google Scholar]
- Moon, S.; Youn, W.; Bang, H. Novel deep-learning-aided multimodal target tracking. IEEE Sens. J. 2021, 21, 20730–20739. [Google Scholar] [CrossRef]
- Xie, G.; Sun, L.; Wen, T.; Hei, X.; Qian, F. Adaptive transition probability matrix-based parallel IMM algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 2980–2989. [Google Scholar] [CrossRef]
- Cosme, L.B.; D’Angelo, M.F.S.V.; Caminhas, W.M.; Camargos, M.O.; Palhares, R.M. An adaptive approach for estimation of transition probability matrix in the interacting multiple model filter. J. Intell. Fuzzy Syst. 2021, 41, 155–166. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Xu, M. DeepMTT: A deep learning maneuvering target-tracking algorithm based on bidirectional LSTM network. Inf. Fusion 2020, 53, 289–304. [Google Scholar] [CrossRef]
- Kim, S.; Choi, J.; Kim, Y. Fault detection and diagnosis of aircraft actuators using fuzzy-tuning IMM filter. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 940–952. [Google Scholar]
- Lee, H.; Jung, J.; Choi, K.; Park, J.; Myung, H. Fuzzy-logic-assisted interacting multiple model (FLAIMM) for mobile robot localization. Rob. Auton. Syst. 2012, 60, 1592–1606. [Google Scholar] [CrossRef]
- Peng, H.; Zhang, X.; Li, H.; Xu, L.; Wang, X. An AI-Enhanced Strategy of Service Offloading for IoV in Mobile Edge Computing. Electronics 2023, 12, 2719. [Google Scholar] [CrossRef]
- Revach, G.; Shlezinger, N.; Ni, X.; Escoriza, A.L.; Van Sloun, R.J.; Eldar, Y.C. KalmanNet: Neural network aided Kalman filtering for partially known dynamics. IEEE Trans. Signal Process. 2022, 70, 1532–1547. [Google Scholar] [CrossRef]
- Chen, X.; Tao, Y.; Xu, W.; Yau, S.S.T. Recurrent neural networks are universal approximators with stochastic inputs. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7992–8006. [Google Scholar] [CrossRef]
- Deng, L.; Li, D.; Li, R. Improved IMM algorithm based on RNNs. J. Phys. Conf. Ser. 2020, 1518, 012055. [Google Scholar] [CrossRef]
- Becker, S.; Hug, R.; Hübner, W.; Arens, M. An RNN-based IMM filter surrogate. In Proceedings of the Scandinavian Conference on Image Analysis, Norrköping, Sweden, 11–13 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 387–398. [Google Scholar]
- Fu, Q.; Lu, K.; Sun, C. Deep Learning Aided State Estimation for Guarded Semi-Markov Switching Systems with Soft Constraints. IEEE Trans. Signal Process. 2023, 71, 3100–3116. [Google Scholar] [CrossRef]
- Geng, W.d.; Wang, Y.q.; Dong, Z.h.; Geng, G.; Yang, F. Group-Target Tracking; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Austin, F.; Carbone, G.; Falco, M.; Hinz, H.; Lewis, M. Automated maneuvering decisions for air-to-air combat. In Proceedings of the Guidance, Navigation and Control Conference, New Orleans, LA, USA, 11–13 August 1987; p. 2393. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Zhang, Y.; Liang, Y.; Elazab, A.; Wang, Z.; Wang, C. Graph Attention Networks and Track Management for Multiple Object Tracking. Electronics 2023, 12, 4079. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory | GRU-Assisted Filtering | Singer-KF | IMM-EKF |
|---|---|---|---|
| Flight1 position RMSE (m) | 2.5237 | 3.9419 | 3.2917 |
| Flight1 velocity RMSE (m/s) | 1.6806 | 2.2451 | 2.0906 |
| Flight2 position RMSE (m) | 2.7068 | 4.2543 | 3.3111 |
| Flight2 velocity RMSE (m/s) | 1.8814 | 2.4985 | 2.1550 |
| Flight3 position RMSE (m) | 2.6991 | 3.8935 | 3.5317 |
| Flight3 velocity RMSE (m/s) | 1.6977 | 2.3391 | 2.1863 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Liu, X.; Li, C.; Zhu, J.; Wu, M.; Su, X. UAV Swarm Centroid Tracking for Edge Computing Applications Using GRU-Assisted Multi-Model Filtering. Electronics 2024, 13, 1054. https://doi.org/10.3390/electronics13061054
Chen Y, Liu X, Li C, Zhu J, Wu M, Su X. UAV Swarm Centroid Tracking for Edge Computing Applications Using GRU-Assisted Multi-Model Filtering. Electronics. 2024; 13(6):1054. https://doi.org/10.3390/electronics13061054
Chicago/Turabian StyleChen, Yudi, Xiangyu Liu, Changqing Li, Jiao Zhu, Min Wu, and Xiang Su. 2024. "UAV Swarm Centroid Tracking for Edge Computing Applications Using GRU-Assisted Multi-Model Filtering" Electronics 13, no. 6: 1054. https://doi.org/10.3390/electronics13061054
APA StyleChen, Y., Liu, X., Li, C., Zhu, J., Wu, M., & Su, X. (2024). UAV Swarm Centroid Tracking for Edge Computing Applications Using GRU-Assisted Multi-Model Filtering. Electronics, 13(6), 1054. https://doi.org/10.3390/electronics13061054