
Pedestrian Trajectory Prediction Based on Motion Pattern De-Perturbation Strategy
 , , ,
, , ,
Abstract
:1. Introduction
- The introduction of latent vectors inevitably introduces redundancy effects; therefore, we propose the use of optimization features to replace trajectory features and interaction features to eliminate these redundant effects.
- Pedestrians without historical trajectories during model training can interfere with the accurate iteration of pedestrian motion patterns; thus, we propose loss masks to eliminate this interference to reduce the uncertainty of the training process.
- Our method, as a migratable module, can effectively eliminate the interference factor of pedestrian motion pattern modeling in two stages, maximizing the performance of the baseline models.
2. Related Work
3. Methods
3.1. Problem Definition
3.2. Method Overview
- The encoding module encodes the input historical pedestrian trajectory to obtain the trajectory features of the pedestrians.
- The portrayal of interactions between pedestrians is generally based on factors such as their distance from each other or the risk of collision. This is performed to obtain the encoding of the interaction feature.
- The complete motion pattern encoding of the pedestrians is obtained by splicing together the trajectory features, interaction features, and introduced latent vectors.
- To decode the high-dimensional features of the predicted trajectory, input the complete motion pattern encoding of pedestrians into the decoding module.
- The predicted trajectory’s high-dimensional features are passed through the output module, typically a linear layer, to obtain the mapped future trajectory.
3.3. Stage 1: Pedestrian Motion Pattern Construction Optimization
3.4. Stage 2: Loss Mask Optimization
4. Experimental Section
4.1. Experimental Settings
4.2. Experimental Evaluation
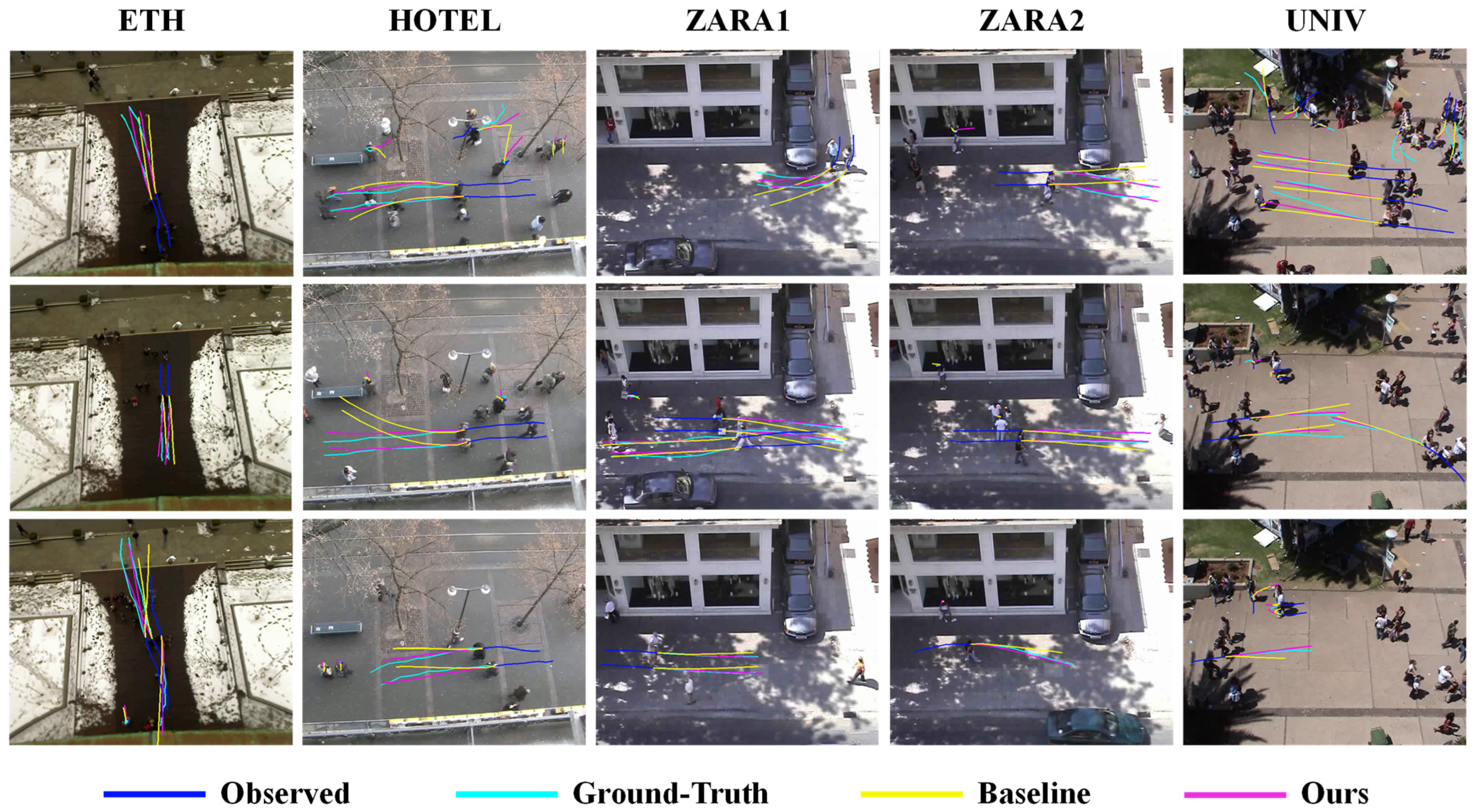
4.3. Visualization Presentation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Exploration of the Effects of Redundancy in Latent Vectors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Performance (ADE/FDE) | |||||
|---|---|---|---|---|---|---|
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| STGAT | 0.90/1.76 | 0.48/0.99 | 0.43/0.92 | 0.33/0.72 | 0.55/1.18 | 0.54/1.11 |
| STGAT w/o LZ | 0.84/1.74 | 0.50/1.05 | 0.41/0.88 | 0.32/0.71 | 0.52/1.12 | 0.52/1.10 |
| STGAT with OF | 0.89/1.75 | 0.47/0.95 | 0.42/0.90 | 0.32/0.70 | 0.53/1.13 | 0.53/1.09 |
Appendix A.2. Evaluation Experiments on the SDD Dataset
| Method | Performance (ADE/FDE) | ||||||
|---|---|---|---|---|---|---|---|
| Pedestrian | Skater | Biker | Car | Bus | Cart | AVG | |
| SocialVAE * | 9.41/15.82 | 34.23/62.08 | 28.79/53.49 | 41.45/64.47 | 25.84/50.51 | 13.12/25.04 | 25.47/45.24 |
| Ours–SocialVAE | 9.26/14.86 | 29.32/50.83 | 25.97/48.90 | 41.63/65.08 | 24.64/49.33 | 11.41/19.40 | 23.71/41.40 |
References
- Alahi, A.; Goel, K.; Ramanathan, V.; Robicquet, A.; Li, F.-F.; Savarese, S. Social LSTM: Human Trajectory Prediction in Crowded Spaces. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 961–971. [Google Scholar]
- Gupta, A.; Johnson, J.; Li, F.-F.; Savarese, S.; Alahi, A. Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2255–2264. [Google Scholar]
- Huang, Y.; Bi, H.; Li, Z.; Mao, T.; Wang, Z. STGAT: Modeling Spatial-Temporal Interactions for Human Trajectory Prediction. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6271–6280. [Google Scholar]
- Yu, C.; Ma, X.; Ren, J.; Zhao, H.; Yi, S. Spatio-temporal graph transformer networks for pedestrian trajectory prediction. In Computer Vision—ECCV 2020, Proceedings of the 16th European Conference, Glasgow, UK, 23–28, August 2020; Proceedings, Part XII 16; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- Dendorfer, P.; Elflein, S.; Leal-Taixé, L. MG-GAN: A Multi-Generator Model Preventing Out-of-Distribution Samples in Pedestrian Trajectory Prediction. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 13138–13147. [Google Scholar]
- Xu, P.; Hayet, J.B.; Karamouzas, I. Socialvae: Human trajectory prediction using timewise latents. In Computer Vision—ECCV 2022, Proceedings of the European Conference, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022. [Google Scholar]
- Chen, G.; Li, J.; Lu, J.; Zhou, J. Human trajectory prediction via counterfactual analysis. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Johora, F.T.; Müller, J.P. Modeling interactions of multimodal road users in shared spaces. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Johora, F.T.; Müller, J.P. On transferability and calibration of pedestrian and car motion models in shared spaces. Transp. Lett. 2021, 13, 172–182. [Google Scholar] [CrossRef]
- Anvari, B.; Bell, M.G.; Sivakumar, A.; Ochieng, W.Y. Modelling shared space users via rule-based social force model. Transp. Res. Part C Emerg. Technol. 2015, 51, 83–103. [Google Scholar] [CrossRef]
- Jan, Q.H.; Kleen, J.M.A.; Berns, K. Self-aware Pedestrians Modeling for Testing Autonomous Vehicles in Simulation. In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), Online, 2–4 May 2020. [Google Scholar]
- Seriani, S.; Fernandez, R. Pedestrian traffic management of boarding and alighting in metro stations. Transp. Res. Part C Emerg. Technol. 2015, 53, 76–92. [Google Scholar] [CrossRef]
- Dubroca-Voisin, M.; Kabalan, B.; Leurent, F. On pedestrian traffic management in railway stations: Simulation needs and model assessment. Transp. Res. Procedia 2019, 37, 3–10. [Google Scholar] [CrossRef]
- Sun, L.; Zhan, W.; Wang, D.; Tomizuka, M. Interactive prediction for multiple, heterogeneous traffic participants with multi-agent hybrid dynamic bayesian network. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Nasernejad, P.; Sayed, T.; Alsaleh, R. Modeling pedestrian behavior in pedestrian-vehicle near misses: A continuous Gaussian Process Inverse Reinforcement Learning (GP-IRL) approach. Accid. Anal. Prev. 2021, 161, 106355. [Google Scholar] [CrossRef] [PubMed]
- Nasernejad, P.; Sayed, T.; Alsaleh, R. Multiagent modeling of pedestrian-vehicle conflicts using Adversarial Inverse Reinforcement Learning. Transp. A Transp. Sci. 2023, 19, 2061081. [Google Scholar] [CrossRef]
- Donahue, J.; Anne Hendricks, L.; Guadarrama, S.; Rohrbach, M.; Venugopalan, S.; Saenko, K.; Darrell, T. Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2625–2634. [Google Scholar] [CrossRef]
- Shu, T.; Todorovic, S.; Zhu, S.C. CERN: Confidence-Energy Recurrent Network for Group Activity Recognition. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4255–4263. [Google Scholar]
- Ma, Y.; Zhu, X.; Zhang, S.; Yang, R.; Wang, W.; Manocha, D. Trafficpredict: Trajectory prediction for heterogeneous traffic-agents. Proc. AAAI Conf. Artif. Intell. 2019, 33, 6120–6127. [Google Scholar] [CrossRef]
- Sadeghian, A.; Kosaraju, V.; Sadeghian, A.; Hirose, N.; Rezatofighi, H.; Savarese, S. Sophie: An attentive gan for predicting paths compliant to social and physical constraints. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Liang, J.; Jiang, L.; Niebles, J.C.; Hauptmann, A.G.; Li, F.-F. Peeking into the future: Predicting future person activities and locations in videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Amirian, J.; Hayet, J.B.; Pettré, J. Social ways: Learning multi-modal distributions of pedestrian trajectories with gans. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Liang, J.; Jiang, L.; Murphy, K.; Yu, T.; Hauptmann, A. The garden of forking paths: Towards multi-future trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Ma, Z.; An, R.; Liu, J.; Cui, Y.; Qi, J.; Teng, Y.; Sun, Z.; Li, J.; Zhang, G. A Pedestrian Trajectory Prediction Method for Generative Adversarial Networks Based on Scene Constraints. Electronics 2024, 13, 628. [Google Scholar] [CrossRef]
- Kosaraju, V.; Sadeghian, A.; Martín-Martín, R.; Reid, I.; Rezatofighi, H.; Savarese, S. Social-bigat: Multimodal trajectory forecasting using bicycle-gan and graph attention networks. In Proceedings of the Advances in Neural Information Processing Systems 32: Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, Vancouver, BC, Canada, 8–14 December 2019. [Google Scholar]
- Mohamed, A.; Qian, K.; Elhoseiny, M.; Claudel, C. Social-stgcnn: A social spatio-temporal graph convolutional neural network for human trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Shi, L.; Wang, L.; Long, C.; Zhou, S.; Zhou, M.; Niu, Z.; Hua, G. SGCN: Sparse graph convolution network for pedestrian trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Yue, J.; Manocha, D.; Wang, H. Human trajectory prediction via neural social physics. In Computer Vision—ECCV 2022, Proceedings of the European Conference, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022. [Google Scholar]
- Bae, I.; Park, J.H.; Jeon, H.G. Non-Probability Sampling Network for Stochastic Human Trajectory Prediction. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 6467–6477. [Google Scholar]
- Pellegrini, S.; Ess, A.; Schindler, K.; van Gool, L. You’ll never walk alone: Modeling social behavior for multi-target tracking. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 261–268. [Google Scholar]
- Lerner, A.; Chrysanthou, Y.; Lischinski, D. Crowds by Example. Comput. Graph. Forum 2007, 26, 655–664. [Google Scholar] [CrossRef]
- Raksincharoensak, P.; Hasegawa, T.; Nagai, M. Motion planning and control of autonomous driving intelligence system based on risk potential optimization framework. Int. J. Automot. Eng. 2016, 7, 53–60. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Ouyang, W.; Zhang, P.; Xue, J.; Zheng, N. Sr-lstm: State refinement for lstm towards pedestrian trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Zhang, L.; She, Q.; Guo, P. Stochastic trajectory prediction with social graph network. arXiv 2019, arXiv:1907.10233. [Google Scholar]
- Zhao, T.; Xu, Y.; Monfort, M.; Choi, W.; Baker, C.; Zhao, Y.; Wang, Y.; Wu, Y.N. Multi-agent tensor fusion for contextual trajectory prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Mangalam, K.; Girase, H.; Agarwal, S.; Lee, K.H.; Adeli, E.; Malik, J.; Gaidon, A. It is not the journey but the destination: Endpoint conditioned trajectory prediction. In Computer Vision—ECCV 2020, Proceedings of the 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part II 16; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- Salzmann, T.; Ivanovic, B.; Chakravarty, P.; Pavone, M. Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data. In Computer Vision—ECCV 2020, Proceedings of the 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XVIII 16; Springer: Cham, Switzerland, 2020; pp. 683–700. [Google Scholar]
- Mohamed, A.; Zhu, D.; Vu, W.; Elhoseiny, M.; Claudel, C. Social-implicit: Rethinking trajectory prediction evaluation and the effectiveness of implicit maximum likelihood estimation. In Computer Vision—ECCV 2022, Proceedings of the European Conference, Tel Aviv, Israel, 23–27 October 2022; Springer Nature: Cham, Switzerland, 2022. [Google Scholar]
- Robicquet, A.; Sadeghian, A.; Alahi, A.; Savarese, S. Learning social etiquette: Human trajectory understanding in crowded scenes. In Computer Vision—ECCV 2016, Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings, Part VIII 14; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Rainbow, B.A.; Men, Q.; Shum, H.P. Semantics-STGCNN: A semantics-guided spatial-temporal graph convolutional network for multi-class trajectory prediction. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021. [Google Scholar]





| Notation | Description |
|---|---|
| Past trajectory of agent | |
| Future trajectory of agent | |
| Trajectory features of agent | |
| Interaction features of agent | |
| Latent vectors sampled from a Gaussian distribution | |
| Weight parameter in the baseline model decoder | |
| Concatenation operation | |
| Pedestrian motion patterns output by the baseline model decoder | |
| Optimization factor utilized to construct optimization features | |
| Optimization features | |
| Decoder output using optimization features | |
| Weight parameter of the output module in the baseline model | |
| Final predicted trajectory obtained using optimization features | |
| Coordinate component of the displacement of agent at time | |
| Average speed of agent over historical observation frames | |
| Loss function defined by the baseline model | |
| Loss mask for agent |
| Baseline 1 | Performance (ADE/FDE) | |||||
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| Social LSTM [1] | 1.09/2.35 | 0.86/1.91 | 0.41/0.88 | 0.52/1.11 | 0.61/1.31 | 0.70/1.52 |
| SoPhie [20] | 0.70/1.43 | 0.76/1.67 | 0.30/0.63 | 0.38/0.78 | 0.54/1.24 | 0.54/1.15 |
| SR-LSTM [33] | 0.63/1.25 | 0.37/0.74 | 0.41/0.90 | 0.32/0.70 | 0.51/1.10 | 0.45/0.94 |
| STSGN [34] | 0.75/1.63 | 0.63/1.01 | 0.30/0.65 | 0.26/0.57 | 0.48/1.08 | 0.48/0.99 |
| MATF [35] | 1.33/2.49 | 0.51/0.95 | 0.44/0.93 | 0.34/0.73 | 0.56/1.19 | 0.64/1.26 |
| MATF GAN [35] | 1.01/1.75 | 0.43/0.80 | 0.26/0.45 | 0.26/0.57 | 0.44/0.91 | 0.48/0.90 |
| PITF [21] | 0.73/1.65 | 0.30/0.59 | 0.38/0.81 | 0.31/0.68 | 0.60/1.27 | 0.46/1.00 |
| Social-BiGAT [25] | 0.69/1.29 | 0.49/1.01 | 0.30/0.62 | 0.36/0.75 | 0.55/1.32 | 0.48/1.00 |
| STGCNN [26] STGAT [3] | 0.64/1.11 0.65/1.12 | 0.49/0.85 0.35/0.66 | 0.34/0.53 0.34/0.69 | 0.30/0.48 0.29/0.60 | 0.44/0.79 0.52/1.10 | 0.44/0.75 0.43/0.83 |
| STGAT * | 0.80/1.42 | 0.37/0.70 | 0.33/0.66 | 0.29/0.61 | 0.55/1.17 | 0.47/0.91 |
| Ours–STGAT | 0.59/1.02 | 0.34/0.61 | 0.32/0.65 | 0.30/0.62 | 0.52/1.12 | 0.41/0.80 |
| Baseline 2 | Performance (ADE/FDE) | |||||
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| SGAN [2] | 0.71/1.29 | 0.48/1.02 | 0.34/0.69 | 0.31/0.64 | 0.56/1.18 | 0.48/0.96 |
| SGAN * | 0.75/1.36 | 0.41/0.82 | 0.33/0.68 | 0.30/0.64 | 0.53/1.13 | 0.46/0.93 |
| Ours–SGAN | 0.64/1.15 | 0.39/0.75 | 0.33/0.67 | 0.29/0.62 | 0.53/1.15 | 0.44/0.87 |
| Baseline 3 | Performance (ADE/FDE) | |||||
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| PECNet [36] | 0.54/0.87 | 0.18/0.24 | 0.22/0.39 | 0.17/0.30 | 0.35/0.60 | 0.29/0.48 |
| Trajectron++ [37] | 0.54/0.94 | 0.16/0.28 | 0.21/0.42 | 0.16/0.31 | 0.28/0.55 | 0.27/0.50 |
| SGCN [27] | 0.63/1.03 | 0.32/0.55 | 0.29/0.53 | 0.25/0.45 | 0.37/0.70 | 0.37/0.65 |
| Social-Implicit [38] | 0.66/1.44 | 0.20/0.36 | 0.25/0.50 | 0.22/0.43 | 0.31/0.60 | 0.33/0.67 |
| SocialVAE [6] | 0.49/0.77 | 0.15/0.24 | 0.19/0.37 | 0.15/0.28 | 0.25/0.47 | 0.25/0.43 |
| SocialVAE * | 0.50/0.85 | 0.15/0.23 | 0.20/0.37 | 0.16/0.29 | 0.25/0.48 | 0.25/0.44 |
| Ours–SocialVAE | 0.48/0.77 | 0.15/0.21 | 0.21/0.37 | 0.15/0.28 | 0.26/0.49 | 0.25/0.42 |
| Performance (ADE/FDE) | ||||||
|---|---|---|---|---|---|---|
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| STGAT* (Baseline) | 0.80/1.42 | 0.37/0.70 | 0.33/0.66 | 0.29/0.61 | 0.55/1.17 | 0.47/0.91 |
| STGAT 1 | 0.59/1.02 | 0.34/0.61 | 0.32/0.65 | 0.30/0.62 | 0.52/1.12 | 0.41/0.80 |
| STGAT 2 | 0.61/1.04 | 0.37/0.73 | 0.32/0.66 | 0.30/0.60 | 0.52/1.11 | 0.42/0.83 |
| STGAT 3 | 0.71/1.25 | 0.35/0.64 | 0.33/0.65 | 0.30/0.61 | 0.56/1.17 | 0.45/0.86 |
| STGAT 4 | 0.67/1.24 | 0.33/0.62 | 0.33/0.67 | 0.31/0.63 | 0.55/1.15 | 0.44/0.86 |
| Performance (ADE/FDE) | ||||||
|---|---|---|---|---|---|---|
| ETH | HOTEL | ZARA1 | ZARA2 | UNIV | AVG | |
| STGAT* (Baseline) | 0.80/1.42 | 0.37/0.70 | 0.33/0.66 | 0.29/0.61 | 0.55/1.17 | 0.47/0.91 |
| STGAT w/o OF | 0.77/1.33 | 0.36/0.67 | 0.33/0.68 | 0.30/0.60 | 0.54/1.17 | 0.46/0.89 |
| STGAT w/o LM | 0.61/1.05 | 0.32/0.61 | 0.33/0.66 | 0.28/0.58 | 0.52/1.11 | 0.41/0.80 |
| Ours–STGAT | 0.59/1.02 | 0.34/0.61 | 0.32/0.65 | 0.30/0.62 | 0.52/1.12 | 0.41/0.80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Y.; Zhang, L.; Chen, J.; Deng, Y.; Huang, Z.; Li, Y.; Cao, Y.; Wu, Z.; Zhang, J. Pedestrian Trajectory Prediction Based on Motion Pattern De-Perturbation Strategy. Electronics 2024, 13, 1135. https://doi.org/10.3390/electronics13061135
Deng Y, Zhang L, Chen J, Deng Y, Huang Z, Li Y, Cao Y, Wu Z, Zhang J. Pedestrian Trajectory Prediction Based on Motion Pattern De-Perturbation Strategy. Electronics. 2024; 13(6):1135. https://doi.org/10.3390/electronics13061135
Chicago/Turabian StyleDeng, Yingjian, Li Zhang, Jie Chen, Yu Deng, Zhixiang Huang, Yingsong Li, Yice Cao, Zhongcheng Wu, and Jun Zhang. 2024. "Pedestrian Trajectory Prediction Based on Motion Pattern De-Perturbation Strategy" Electronics 13, no. 6: 1135. https://doi.org/10.3390/electronics13061135