
Modeling and Analysis of Stable Contact States in the Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
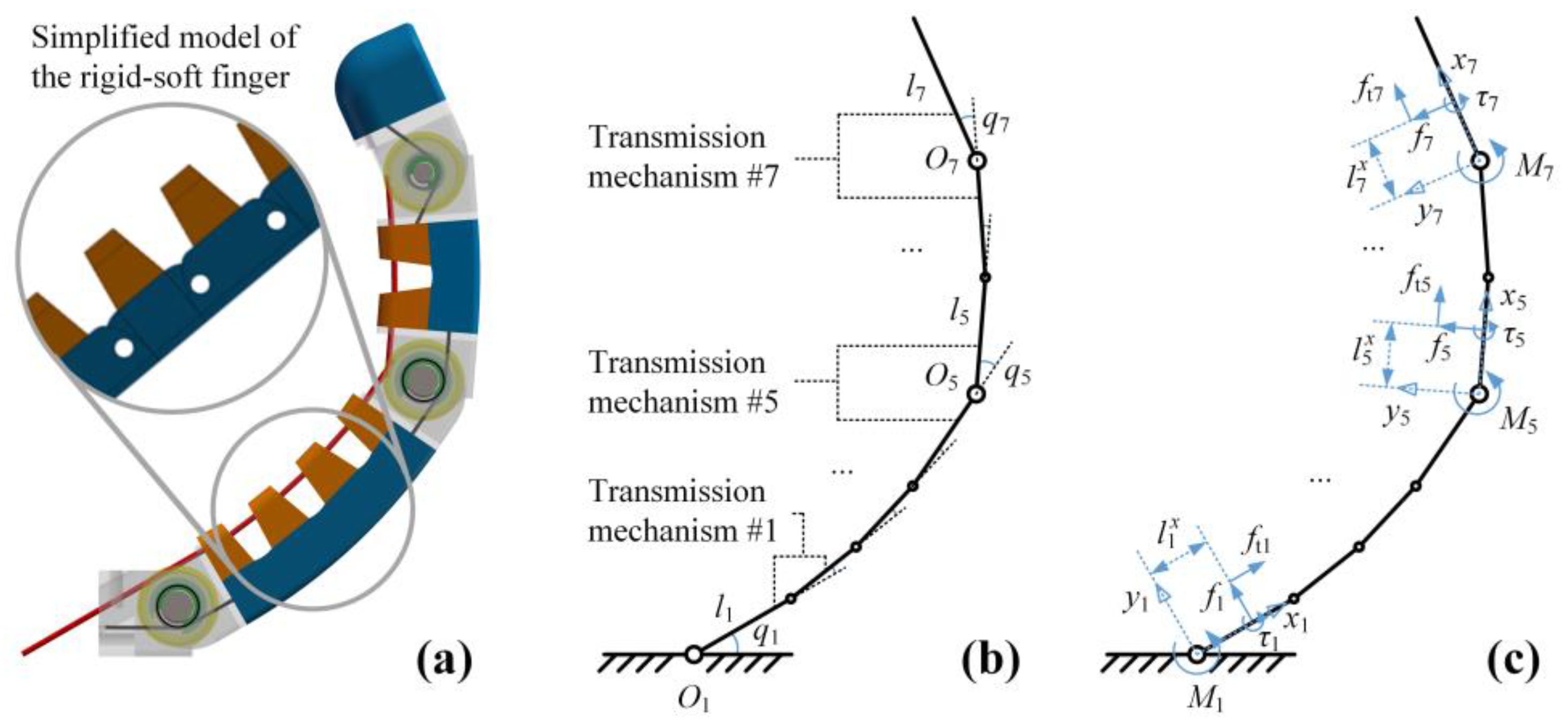
2. The Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures
3. Kinetostatic Modeling of the Anthropomorphic Robotic Hand
4. Stable Contact State Analysis of the Anthropomorphic Robotic Hand
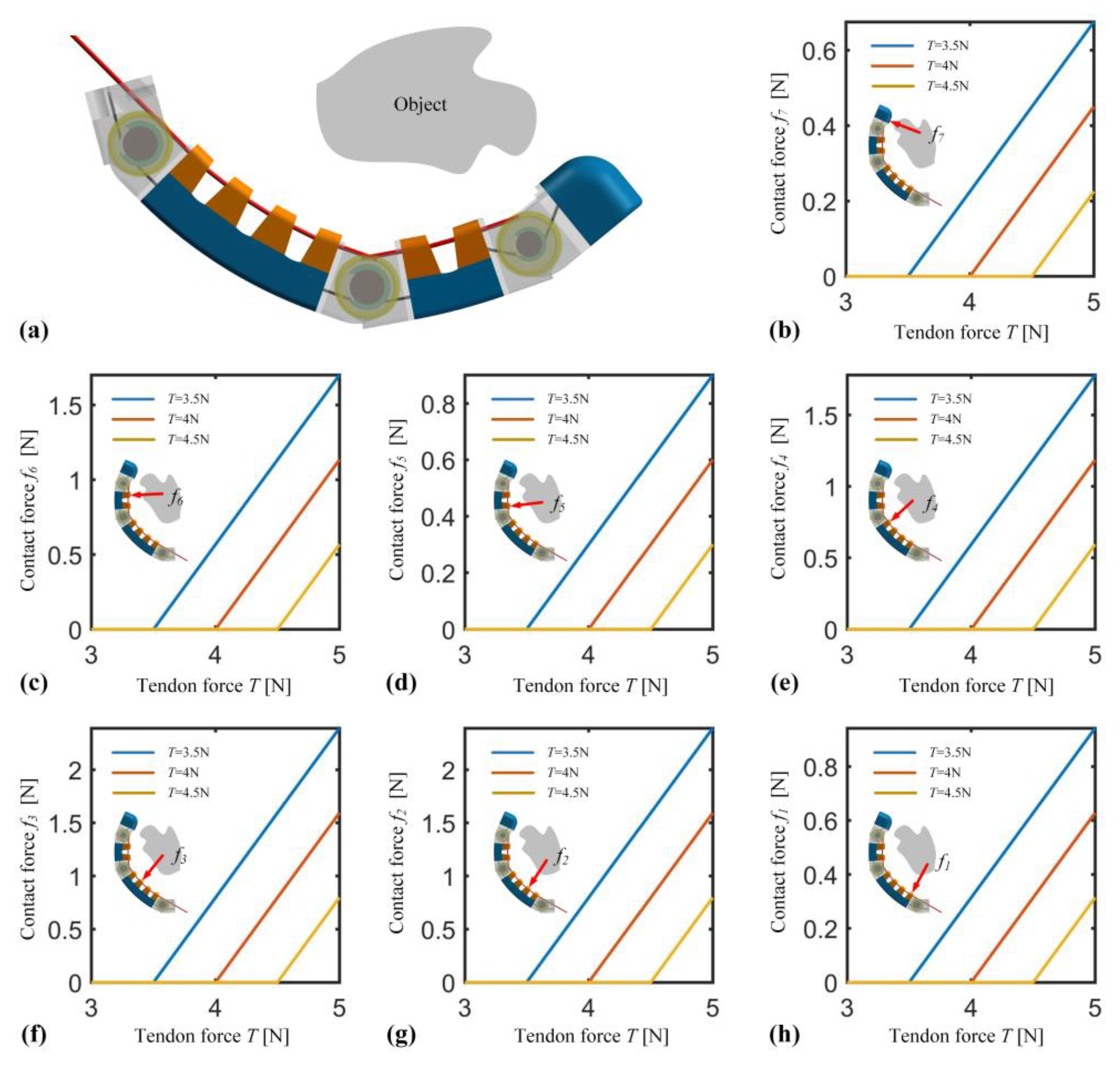
4.1. Contact Force Analysis
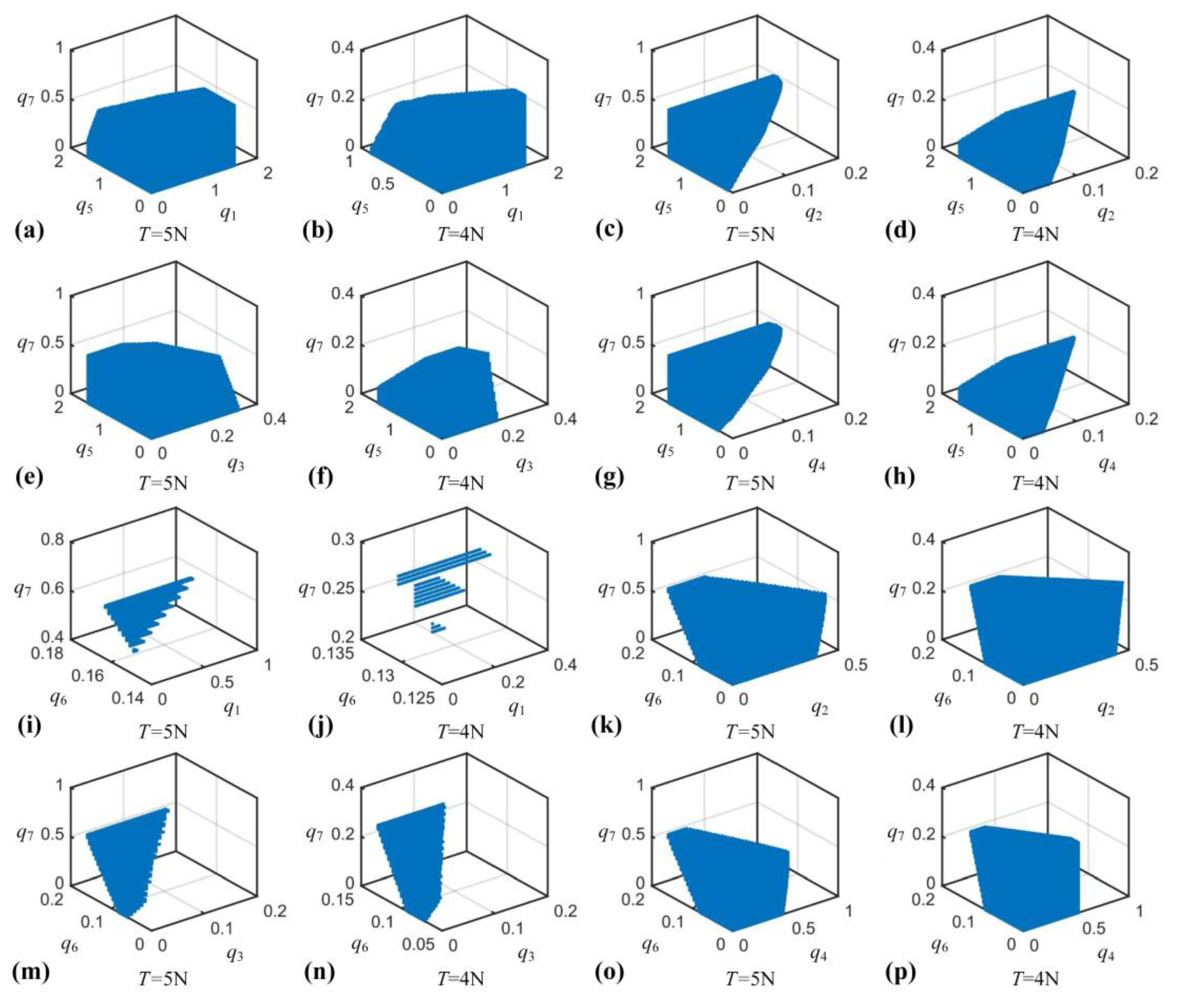
4.2. Stable Contact Region Analysis
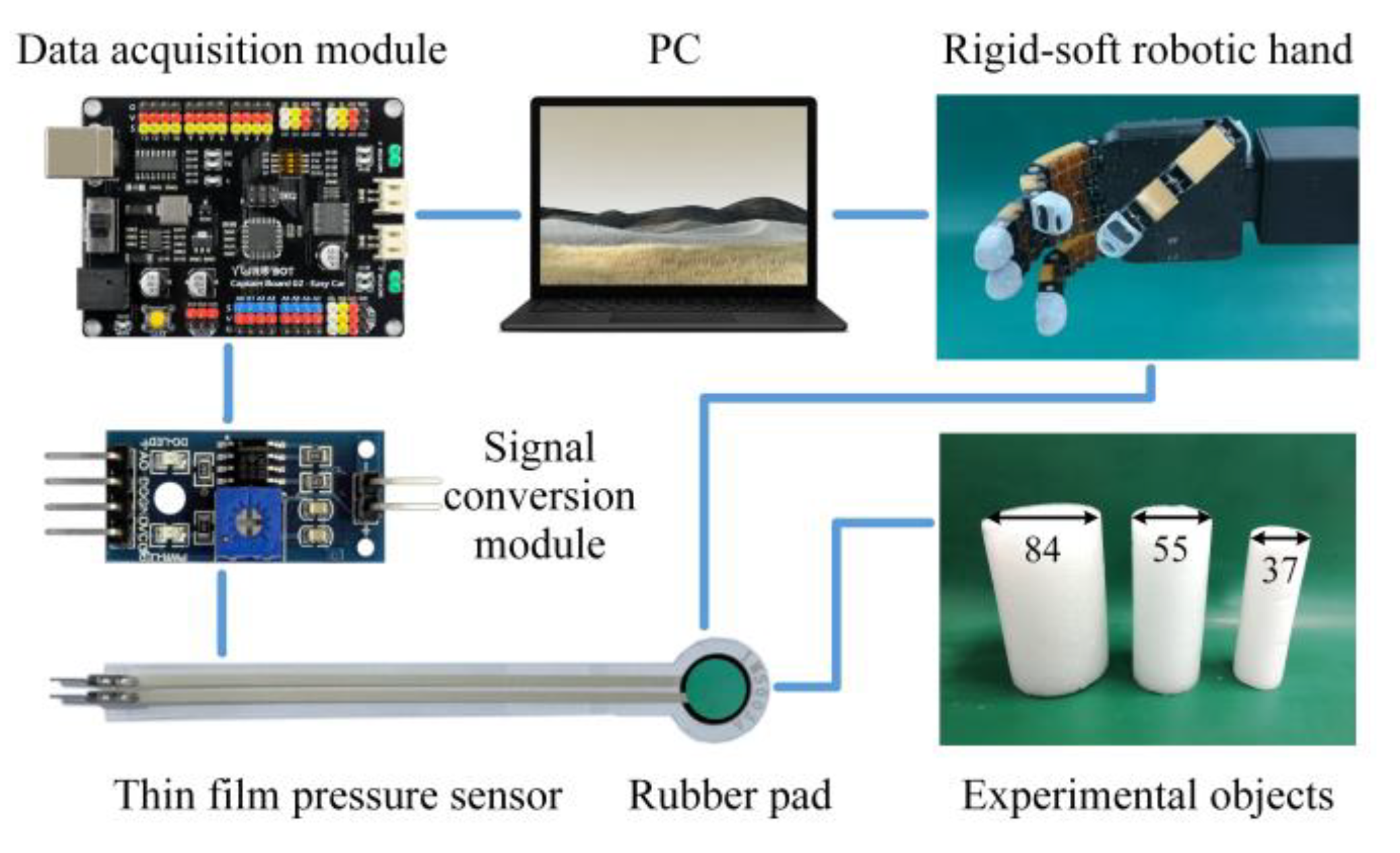
5. Experimental Validation
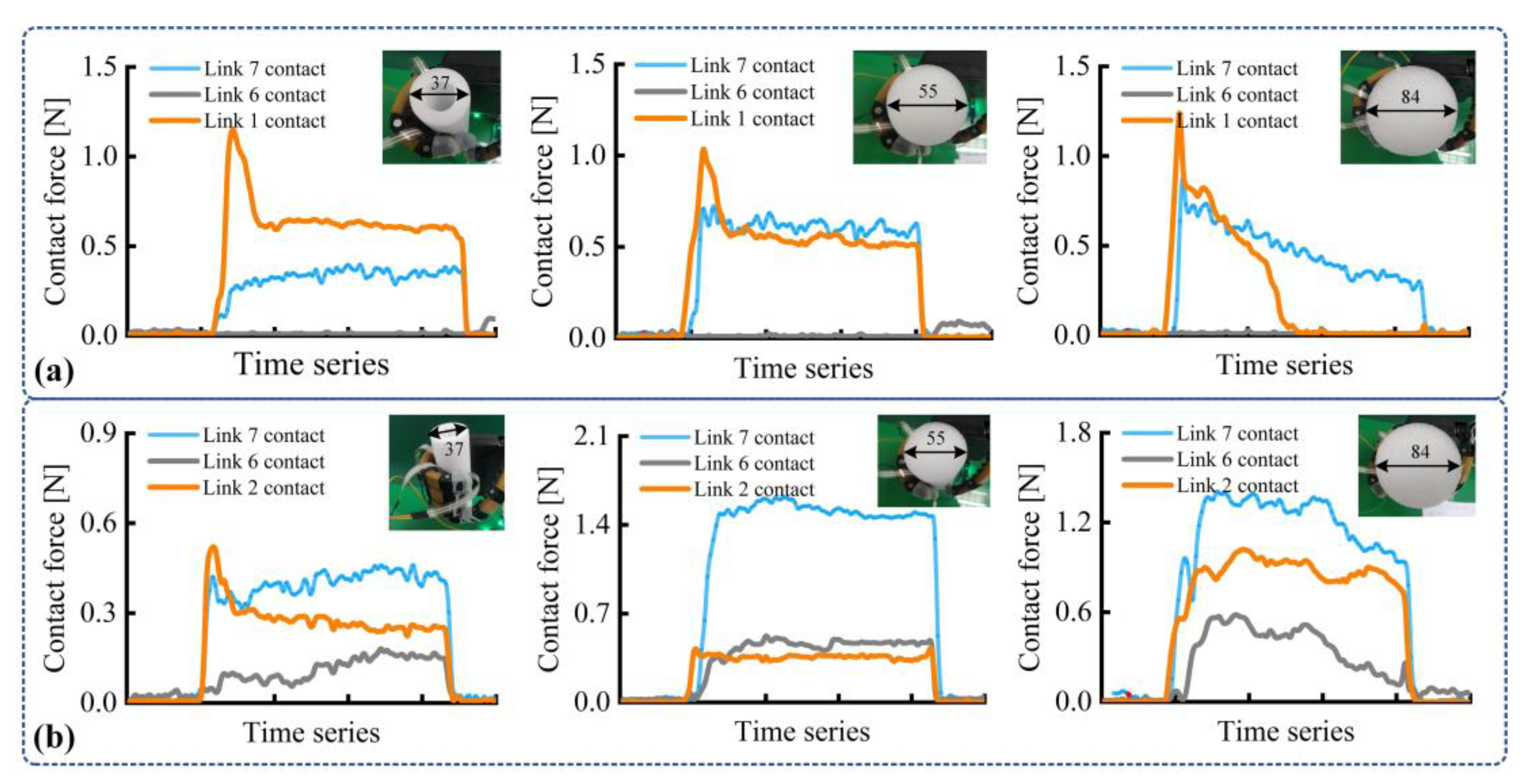
5.1. Experimental Validation of Contact Forces
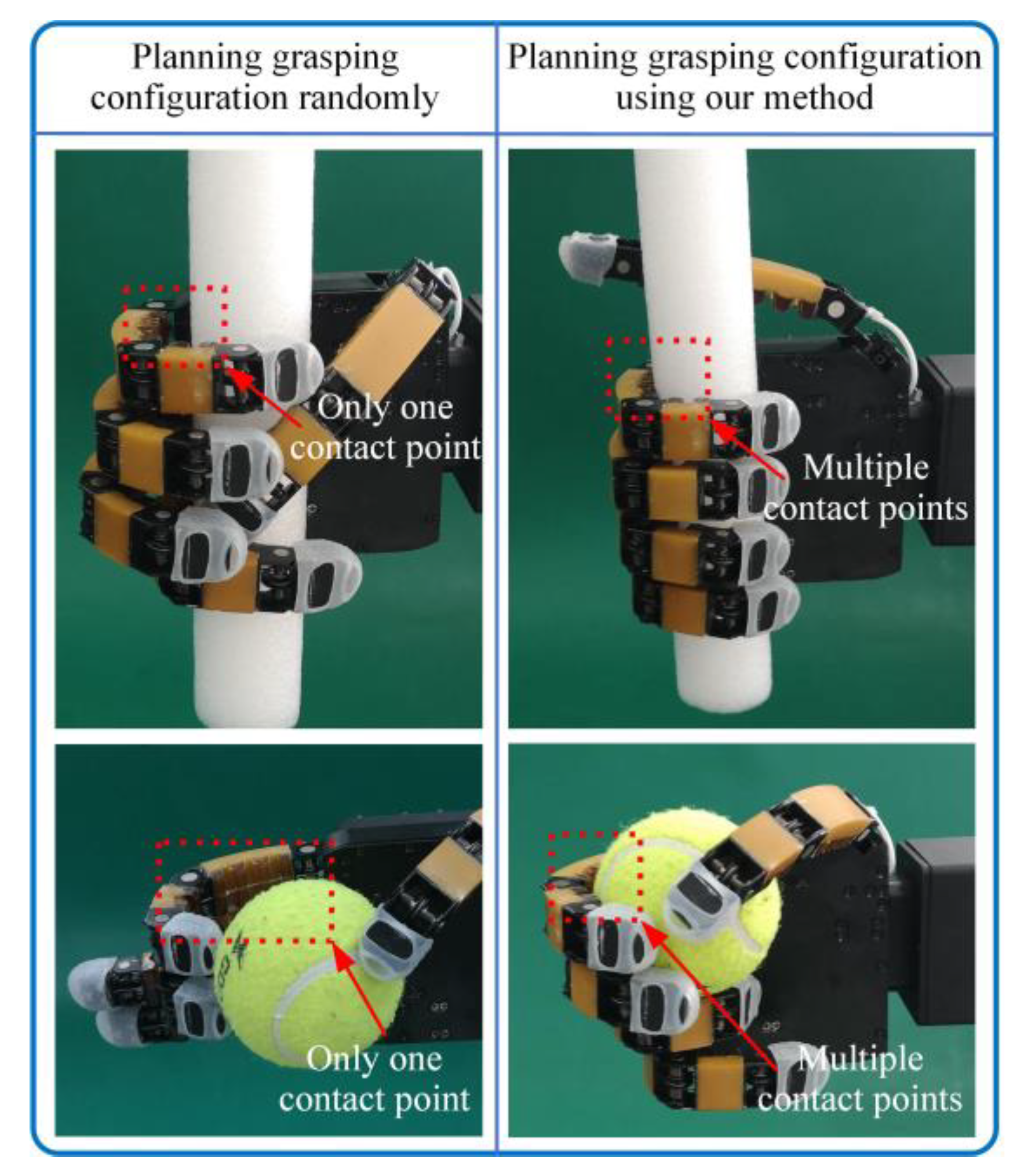
5.2. Experimental Validation of Stable Contact States
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C.; Chen, W.; Yue, S. Mechanical adaptability analysis of underactuated mechanisms. Robot. Com-Int. Manuf. 2018, 49, 436–447. [Google Scholar] [CrossRef]
- Palli, G.; Melchiorri, C.; Vassura, G.; Scarcia, U.; Moriello, L.; Berselli, G.; Cavallo, A.; De Maria, G.; Natale, C.; Pirozzi, S. The DEXMART hand: Mechatronic design and experimental evaluation of synergy-based control for human-like grasping. Int. J. Robot. Res. 2014, 33, 799–824. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C. Adaptability analysis, evaluation and regulation of compliant underactuated mechanisms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 6039–6046. [Google Scholar]
- Yao, S.; Ceccarelli, M.; Carbone, G.; Dong, Z. Grasp configuration planning for a low-cost and easy-operation underactuated three-fingered robot hand. Mech. Mach. Theory 2018, 129, 51–69. [Google Scholar] [CrossRef]
- Deng, Z.; Jonetzko, Y.; Zhang, L.; Zhang, J. Grasping force control of multi-fingered robotic hands through tactile sensing for object stabilization. Sensors 2020, 20, 1050. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Lee, J.; Chung, W.; Lee, J. Artificial intelligence-based optimal grasping control. Sensors 2020, 20, 6390. [Google Scholar] [CrossRef] [PubMed]
- Kappassov, Z.; Corrales, J.; Perdereau, V. Tactile sensing in dexterous robot hands-a review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Liu, H.; Nguyen, K.C.; Perdereau, V.; Bimbo, J.; Back, J.; Godden, M.; Seneviratne, L.D.; Althoefer, K. Finger contact sensing and the application in dexterous hand manipulation. Auton. Robot. 2015, 39, 25–41. [Google Scholar] [CrossRef]
- Bicchi, A.; Salisbury, J.K.; Brock, D.L. Contact sensing from force measurements. Int. J. Robot. Res. 1993, 12, 249–262. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Romano, J.M.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K.J. Human-inspired robotic grasp control with tactile sensing. IEEE T Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]
- Lin, M.A.; Thomasson, R.; Uribe, G.; Choi, H.; Cutkosky, M.R. Exploratory hand: Leveraging safe contact to facilitate manipulation in cluttered spaces. IEEE Robot. Autom. Lett. 2021, 6, 5159–5166. [Google Scholar] [CrossRef]
- Backus, S.B.; Dollar, A.M. Robust resonant frequency-based contact detection with applications in robotic reaching and grasping. IEEE-ASME T Mech. 2013, 19, 1552–1561. [Google Scholar] [CrossRef]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Robust proprioceptive grasping with a soft robot hand. Auton. Robot. 2019, 43, 681–696. [Google Scholar] [CrossRef]
- Del Sol, E.; King, R.; Scott, R.; Ferre, M. External force estimation for teleoperation based on proprioceptive sensors. Int. J. Adv. Robot. Syst. 2014, 11, 52. [Google Scholar] [CrossRef]
- Della Santina, C.; Piazza, C.; Santaera, G.; Grioli, G.; Catalano, M.; Bicchi, A. Estimating contact forces from postural measures in a class of under-actuated robotic hands. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2456–2463. [Google Scholar]
- Shan, X.; Birglen, L. Modeling and analysis of soft robotic fingers using the fin ray effect. Int. J. Robot. Res. 2020, 39, 1686–1705. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, Y.; Chen, X.; Wang, Z.; Li, Y.; Liu, Y. A proprioceptive bellows (PB) actuator with position feedback and force estimation. IEEE Robot. Autom. Lett. 2020, 5, 1867–1874. [Google Scholar] [CrossRef]
- Kaneko, M.; Tanie, K. Contact point detection for grasping an unknown object using self-posture changeability. IEEE Trans. Robot. Autom. 1994, 10, 355–367. [Google Scholar] [CrossRef]
- Belzile, B.; Birglen, L. Stiffness analysis of double tendon underactuated fingers. In Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6679–6684. [Google Scholar]
- Pastor, F.; Gandarias, J.M.; García-Cerezo, A.J.; Muñoz-Ramírez, A.J.; Gómez-De-Gabriel, J.M. Grasping angle estimation of human forearm with underactuated grippers using proprioceptive feedback. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2019; pp. 441–452. [Google Scholar]
- Karayiannidis, Y.; Smith, C.; Vina, F.E.; Kragic, D. Online contact point estimation for uncalibrated tool use. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2488–2494. [Google Scholar]
- Park, M.; Jeong, B.; Park, Y. Hybrid system analysis and control of a soft robotic gripper with embedded proprioceptive sensing for enhanced gripping performance. Adv. Intell. Syst. 2021, 3, 2000061. [Google Scholar] [CrossRef]
- Abdeetedal, M.; Kermani, M.R. Grasp and stress analysis of an underactuated finger for proprioceptive tactile sensing. IEEE-ASME T Mech. 2018, 23, 1619–1629. [Google Scholar] [CrossRef]
- Deckers, P.; Dollar, A.M.; Howe, R.D. Guiding grasping with proprioception and Markov models. In Proceedings of the Robotics: Science and Systems Conference (RSS), Atlanta, GA, USA, 30 June 2007. [Google Scholar]
- Korenblik, J. Minimal Sensing Approach of an Underactuated Flexure Based Gripper for Agri-Food Applications; University of Twente: Enschede, The Netherlands, 2021. [Google Scholar]
- Li, Y.; Cong, M.; Liu, D.; Du, Y. A practical model of hybrid robotic hands for grasping applications based on bioinspired form. J. Intell. Robot. Syst. 2022, 105, 73. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Su, H. A three-spring pseudorigid-body model for soft joints with significant elongation effects. J. Mech. Robot. 2016, 8, 061001. [Google Scholar] [CrossRef]
- Hunt, K.H. Kinematic Geometry of Mechanisms; Oxford University Press: New York, NY, USA, 1990. [Google Scholar]
- Cutkosky, M.R. On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Trans. Robot. Autom. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Li, Y.; Cong, M.; Liu, D.; Du, Y.; Xu, X. Stable grasp planning based on minimum force for dexterous hands. Intell. Serv. Robot. 2020, 13, 251–262. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, C. On adaptive grasp with underactuated anthropomorphic hands. J. Bionic Eng. 2016, 13, 59–72. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Liu, Y.; Li, Q.; Zeng, Y.; Yin, C.; Sun, Z.; Zheng, D.; Du, Y.; Cong, M.; Jiang, L. Modeling and Analysis of Stable Contact States in the Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures. Electronics 2024, 13, 1319. https://doi.org/10.3390/electronics13071319
Li Y, Liu Y, Li Q, Zeng Y, Yin C, Sun Z, Zheng D, Du Y, Cong M, Jiang L. Modeling and Analysis of Stable Contact States in the Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures. Electronics. 2024; 13(7):1319. https://doi.org/10.3390/electronics13071319
Chicago/Turabian StyleLi, Yongyao, Yufei Liu, Qingzhan Li, Yi Zeng, Chengxin Yin, Zeyuan Sun, Dongdong Zheng, Yu Du, Ming Cong, and Lei Jiang. 2024. "Modeling and Analysis of Stable Contact States in the Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures" Electronics 13, no. 7: 1319. https://doi.org/10.3390/electronics13071319
APA StyleLi, Y., Liu, Y., Li, Q., Zeng, Y., Yin, C., Sun, Z., Zheng, D., Du, Y., Cong, M., & Jiang, L. (2024). Modeling and Analysis of Stable Contact States in the Anthropomorphic Robotic Hand with Soft Materials and Rigid Structures. Electronics, 13(7), 1319. https://doi.org/10.3390/electronics13071319