



Modeling and Performance Analysis of mmWave and WiFi-Based Vehicle Communications

 , ,
, ,
Abstract
:1. Introduction
1.1. Related Work
1.2. Contribution
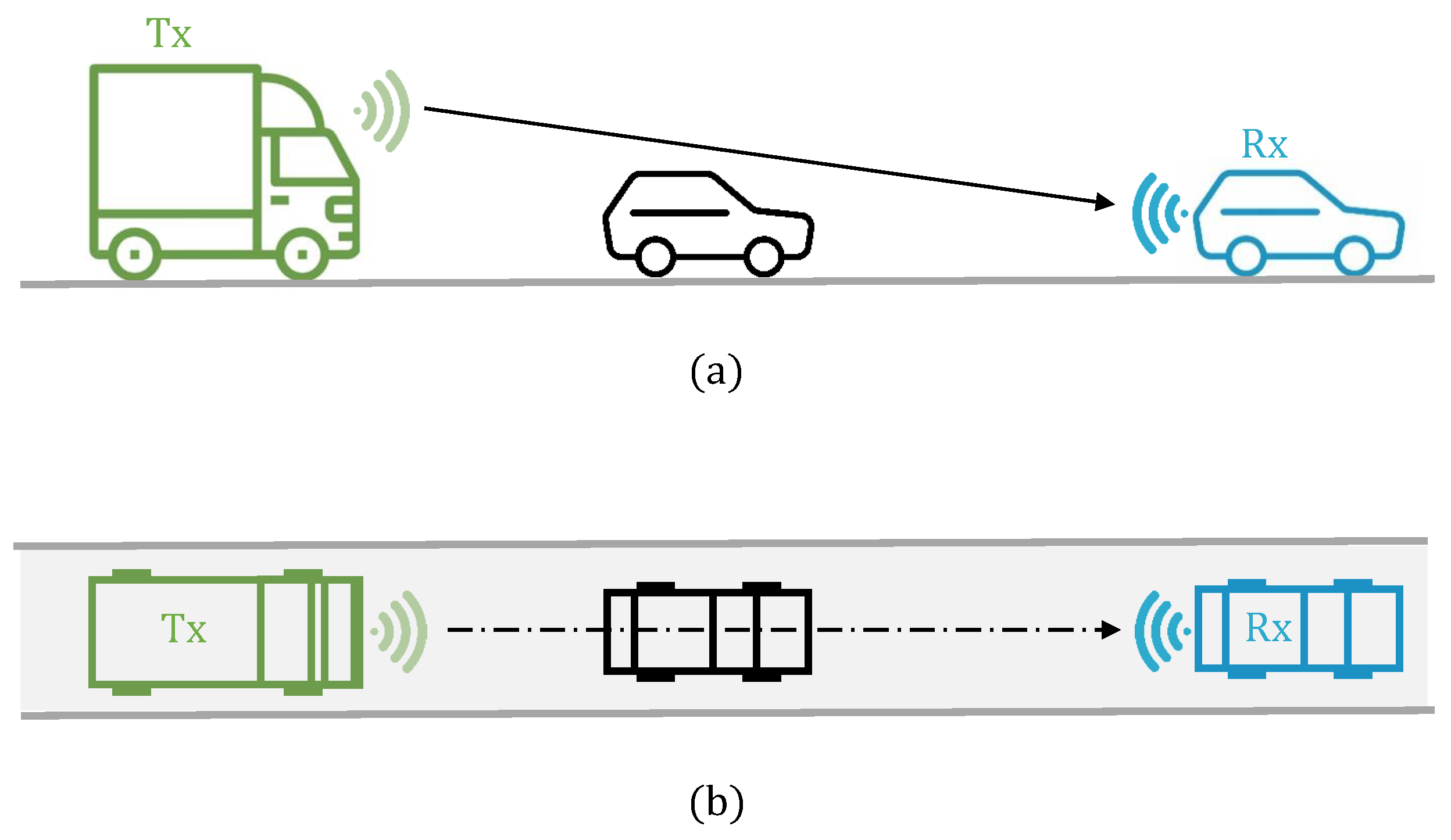
- We introduce a sophisticated system model employing stochastic geometry. This model uniquely positions vehicles according to the Matérn Hard Core Process and utilizes general Nakagami-m fading channels. Notably, it incorporates vehicle altitude—a parameter not considered in previous studies [23,24,25,26,31]—offering a more comprehensive approach to modeling V2V communications.
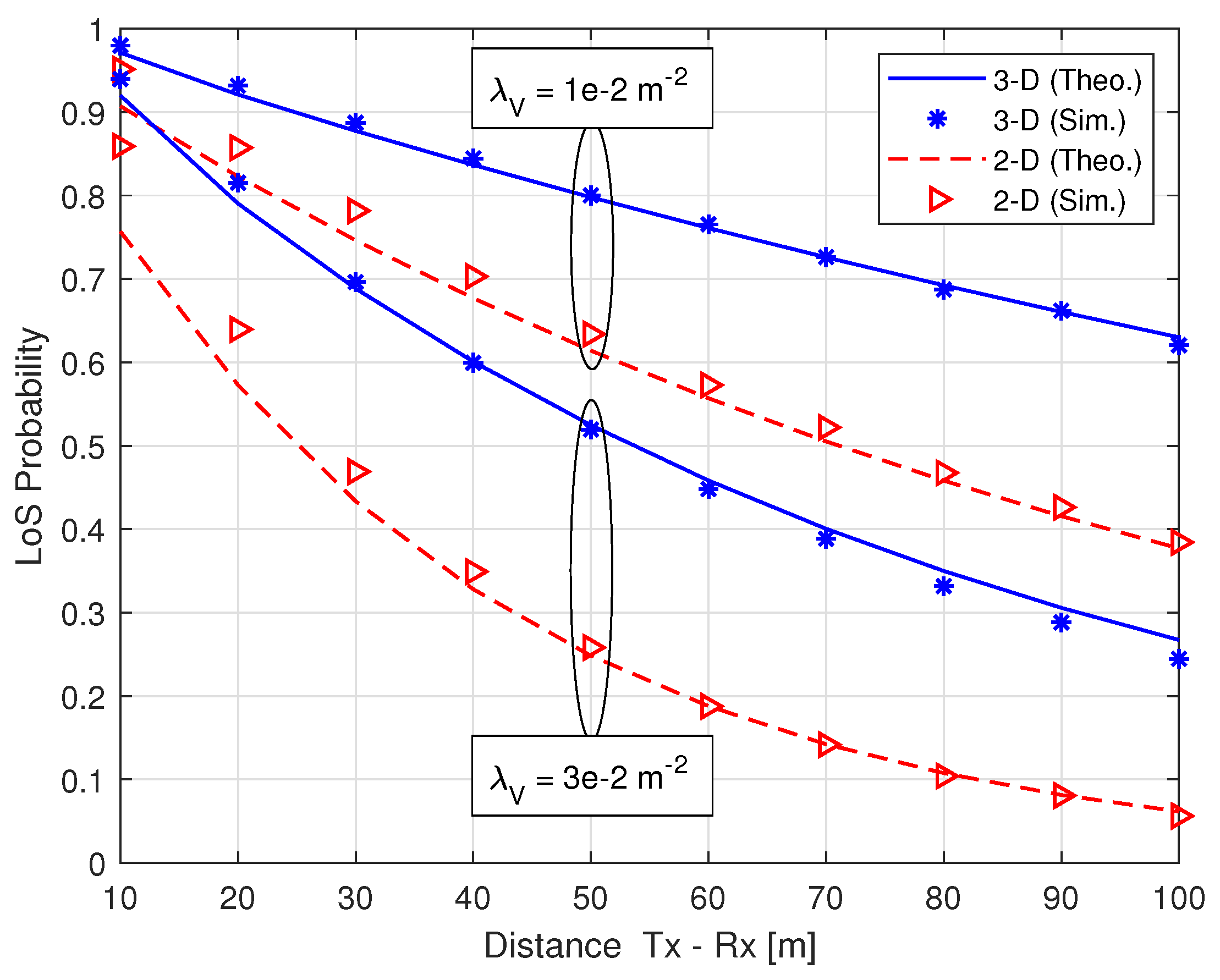
- Expanding upon our preliminary findings, we provide a detailed comparative analysis between 3D and 2D modeling approaches, particularly emphasizing the role of vehicle altitude. This analysis seeks to underline the significance of altitude in influencing key performance metrics and to demonstrate the superior realism and predictive reliability afforded by 3D modeling in V2V communication studies.
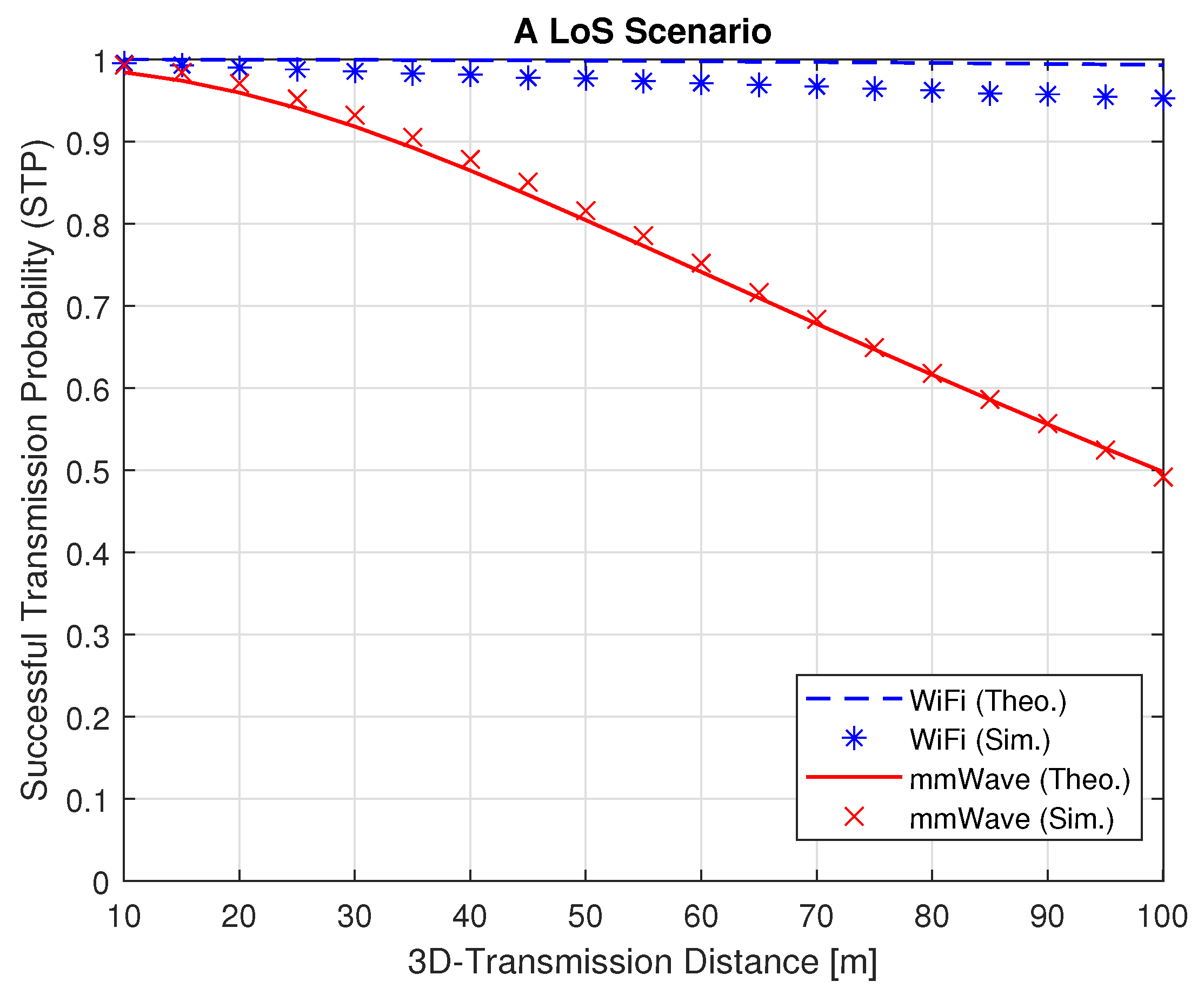
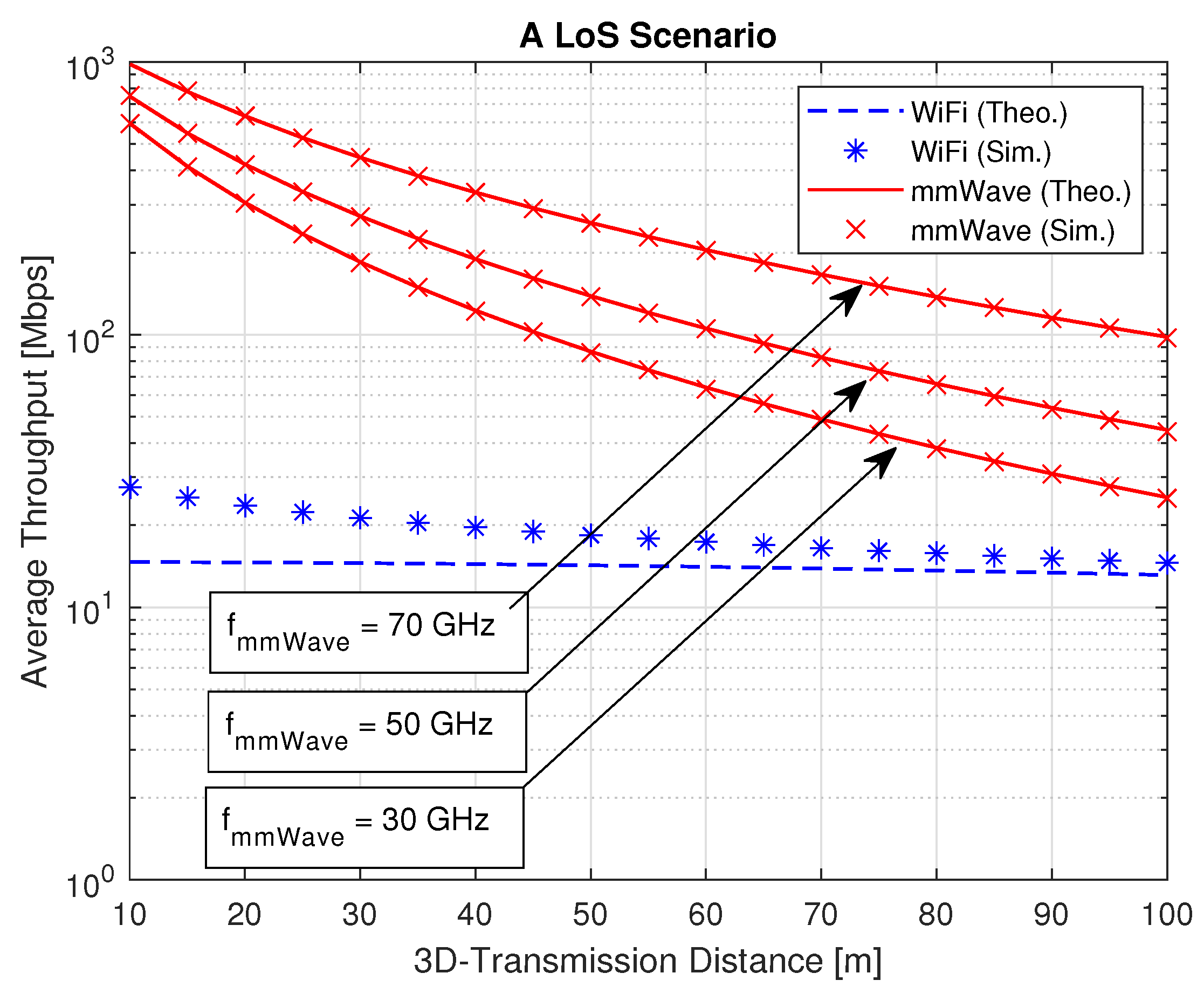
- Moreover, we conduct an extensive comparison of mmWave and WiFi technologies within the V2V communication context. By deriving and examining expressions for metrics such as the probability of line of sight, average throughput, and successful transmission probability, this comparison elucidates the distinct advantages and limitations of each technology. Given their respective roles in automotive applications—WiFi with its ubiquity but limited bandwidth, and mmWave with its higher bandwidth but reduced range—this analysis is crucial for optimizing the application of these technologies in future vehicular communication frameworks.
1.3. Paper Organization
2. System Model
2.1. WiFi Communications
2.2. Millimeter Wave Communications
2.3. Derivation of the PLoS
- Cases 1 and 2: In these cases, and as shown in Figure 2a,b, the obstacle’s height is lower than that of the receiver and the transmitter, i.e., or . Accordingly, the probability of LOS, in this case, can be defined as the probability of the event when . The derivation of this probability expression is detailed in Appendix A, which yields to .
- Cases 3 and 4: The conditions of these cases can be written as , where presents the maximum vehicle’s height, beyond which there is no LoS between and . As shown in Figure 2c,d, this threshold can be expressed as follows:Based on that, Appendix B details the derivation of the corresponding PLoS expression, which is given by:Now, after considering all the LoS possible cases, and taking into consideration a given number of vehicles between and , the final expression of , in a 3D model, is expressed as follows:Note that while our discussion focuses on LoS scenarios, our analysis inherently includes considerations for NLoS scenarios as well. This is due to the complementary relationship between LoS and NLoS conditions. Specifically, the NLoS probability (PNLoS) can be expressed as . Considering the presented system model, we elaborate in the following section the corresponding performance analysis.
3. Performance Analysis
3.1. Successful Transmission Probability ()
3.1.1. WiFi Communications Scenario
- (a)
- LoS Scenario:
- (b)
- NLoS Scenario:
3.1.2. mmWaves Communication Scenario
- (a)
- LoS Scenario:
- (b)
- NLoS Scenario:
3.2. Average Throughput
3.2.1. WiFi Communications Scenario
- (a)
- LoS Scenario:
- (b)
- NLoS Scenario:
3.2.2. mmWaves Communications Scenario
- (a)
- LoS Scenario:
- (b)
- NLoS Scenario:
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Derivation of PLoS Expression for Cases 1&2: p1,2
Appendix B. Derivation of PLoS for Case 3 and 4: p3,4
References
- Abraham, K.S.; Rabin, R.L. Automated vehicles and manufacturer responsibility for accidents. Va. Law Rev. 2019, 105, 127–171. [Google Scholar]
- Sroka, P.; Ström, E.; Svensson, T.; Kliks, A. Autonomous Controller-Aware Scheduling of Intra-Platoon V2V Communications. Sensors 2022, 23, 60. [Google Scholar] [CrossRef]
- Tan, H.; Zhao, F.; Hao, H.; Liu, Z. Evidence for the crash avoidance effectiveness of intelligent and connected vehicle technologies. Int. J. Environ. Res. Public Health 2021, 18, 9228. [Google Scholar] [CrossRef] [PubMed]
- Ivanescu, T.; Yetgin, H.; Merrett, G.V.; El-Hajjar, M. Multi-Source Multi-Destination Hybrid Infrastructure-Aided Traffic Aware Routing in V2V/I Networks. IEEE Access 2022, 10, 119956–119969. [Google Scholar] [CrossRef]
- Ali, R.; Liu, R.; Nayyar, A.; Waris, I.; Li, L.; Shah, M.A. Intelligent Driver Model-Based Vehicular Ad Hoc Network Communication in Real-Time Using 5G New Radio Wireless Networks. IEEE Access 2023, 11, 4956–4971. [Google Scholar] [CrossRef]
- Damaj, I.W.; Yousafzai, J.K.; Mouftah, H.T. Future trends in connected and autonomous vehicles: Enabling communications and processing technologies. IEEE Access 2022, 10, 42334–42345. [Google Scholar] [CrossRef]
- Sepasgozar, S.S.; Pierre, S. Network traffic prediction model considering road traffic parameters using artificial intelligence methods in VANET. IEEE Access 2022, 10, 8227–8242. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Kabil, A.; Rabieh, K.; Kaleem, F.; Azer, M.A. Vehicle to pedestrian systems: Survey, challenges and recent trends. IEEE Access 2022, 10, 123981–123994. [Google Scholar] [CrossRef]
- Hussein, N.H.; Yaw, C.T.; Koh, S.P.; Tiong, S.K.; Chong, K.H. A comprehensive survey on vehicular networking: Communications, applications, challenges, and upcoming research directions. IEEE Access 2022, 10, 86127–86180. [Google Scholar] [CrossRef]
- Alhilal, A.Y.; Finley, B.; Braud, T.; Su, D.; Hui, P. Street Smart in 5G: Vehicular Applications, Communication, and Computing. IEEE Access 2022, 10, 105631–105656. [Google Scholar] [CrossRef]
- Naeem, A.B.; Soomro, A.M.; Saim, H.M.; Malik, H. Smart road management system for prioritized autonomous vehicles under vehicle-to-everything (V2X) communication. Multimed. Tools Appl. 2023, 1–18. [Google Scholar] [CrossRef]
- Wang, M.; Chen, X.; Jin, B.; Lv, P.; Wang, W.; Shen, Y. A novel V2V cooperative collision warning system using UWB/DR for intelligent vehicles. Sensors 2021, 21, 3485. [Google Scholar] [CrossRef] [PubMed]
- Arikumar, K.S.; Prathiba, S.B.; Basheer, S.; Moorthy, R.S.; Dumka, A.; Rashid, M. V2X-Based Highly Reliable Warning System for Emergency Vehicles. Appl. Sci. 2023, 13, 1950. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Chen, X.; Leng, S.; Tang, Z.; Xiong, K.; Qiao, G. A millimeter wave-based sensor data broadcasting scheme for vehicular communications. IEEE Access 2019, 7, 149387–149397. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Dimian, M. Vehicular communications utility in road safety applications: A step toward self-aware intelligent traffic systems. Symmetry 2021, 13, 438. [Google Scholar] [CrossRef]
- Abbasi, I.A.; Shahid Khan, A. A review of vehicle to vehicle communication protocols for VANETs in the urban environment. Future Internet 2018, 10, 14. [Google Scholar] [CrossRef]
- Tahir, M.N.; Leviäkangas, P.; Katz, M. Connected vehicles: V2V and V2I road weather and traffic communication using cellular technologies. Sensors 2022, 22, 1142. [Google Scholar] [CrossRef] [PubMed]
- Giordani, M.; Zanella, A.; Higuchi, T.; Altintas, O.; Zorzi, M. On the Feasibility of Integrating mmWave and IEEE 802.11 p for V2V Communications. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar]
- Tahir, M.N.; Katz, M. Performance evaluation of IEEE 802.11 p, LTE and 5G in connected vehicles for cooperative awareness. Eng. Rep. 2022, 4, e12467. [Google Scholar] [CrossRef]
- Sial, M.N.; Deng, Y.; Ahmed, J.; Nallanathan, A.; Dohler, M. Stochastic geometry modeling of cellular V2X communication over shared channels. IEEE Trans. Veh. Technol. 2019, 68, 11873–11887. [Google Scholar] [CrossRef]
- Chetlur, V.V.; Dhillon, H.S. Coverage analysis of a vehicular network modeled as Cox process driven by Poisson line process. IEEE Trans. Wirel. Commun. 2018, 17, 4401–4416. [Google Scholar] [CrossRef]
- Jeyaraj, J.P.; Haenggi, M. Reliability analysis of V2V communications on orthogonal street systems. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Chen, R.; Zhong, Z.; Leung, V.C.; Michelson, D.G. Performance analysis of connectivity for vehicular ad hoc networks with moving obstructions. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–5. [Google Scholar]
- Tchouankem, H.; Zinchenko, T.; Schumacher, H. Impact of buildings on vehicle-to-vehicle communication at urban intersections. In Proceedings of the 2015 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 206–212. [Google Scholar]
- Yi, W.; Liu, Y.; Nallanathan, A. Signal fractions analysis and safety-distance modeling in V2V inter-lane communications. IEEE Commun. Lett. 2020, 25, 1387–1390. [Google Scholar] [CrossRef]
- Jeyaraj, J.P.; Haenggi, M. Cox models for vehicular networks: SIR performance and equivalence. IEEE Trans. Wirel. Commun. 2020, 20, 171–185. [Google Scholar] [CrossRef]
- Petrov, V.; Kokkoniemi, J.; Moltchanov, D.; Lehtomäki, J.; Juntti, M.; Koucheryavy, Y. The impact of interference from the side lanes on mmWave/THz band V2V communication systems with directional antennas. IEEE Trans. Veh. Technol. 2018, 67, 5028–5041. [Google Scholar] [CrossRef]
- Li, K.; Zhou, S.; Tan, G. Performance Analysis of a Reconfigurable-Intelligent-Surfaces-Assisted V2V Communication System. Electronics 2023, 12, 2383. [Google Scholar] [CrossRef]
- Rjab, M.; Omri, A.; Bouallegue, S.; Chamkhia, H.; Bouallegue, R. Modeling and Performance Analysis of mmWave and WiFi Transmissions for V2V Communications. In Proceedings of the 2024 Submitted In 25th IEEE Wireless Communications and Networking Conference (WCNC), Dubai, United Arab Emirates, 21–24 April 20024; IEEE: Piscataway, NJ, USA, 2024. [Google Scholar]
- Abughalwa, M.; Omri, A.; Hasna, M.O. On the average secrecy outage rate and average secrecy outage duration of wiretap channels with rician fading. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 736–740. [Google Scholar]
- Bachtobji, S.; Omri, A.; Bouallegue, R. Modelling and performance analysis of 3-D mmWaves based heterogeneous networks. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 72–76. [Google Scholar] [CrossRef]
- Gradshteyn, I.; Ryzhik, I. Tables of Integrals, Series and Products, 7th ed.; Elsevier: New York, NY, USA, 2007. [Google Scholar]
- Omri, A.; Hasna, M.O. Modeling and Performance Analysis of D2D Communications with Interference Management in 3-D HetNets. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Bachtobji, S.; Omri, A.; Bouallegue, R.; Raoof, K. Modelling and Performance Analysis of mmWaves and Radio-Frequency based 3D Heterogeneous Networks. IET Commun. 2018, 12, 290–296. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stochastic Geometry Process | Space Dimension | Channel Model | Performance Analysis Metric | Advantages | Limitations | Ref. |
|---|---|---|---|---|---|---|
| Poisson Point Process | 1-D | Nakagami | SIR | - A low performance analysis complexity. | - A low performance analysis accuracy due to the use of SIR metric and 1D modeling | [23] |
| Rayleigh | SINR | - A comprehensive analysis of the signal fraction (SF)’s performances. | - Complexity of modeling vehicle interactions in realistic vehicle network scenarios. - A low performance analysis accuracy due to the use of Rayleigh channels and 1D modeling. | [27] | ||
| 2-D | Rayleigh | SINR | - Assessment of C-V2X communication performance with flexible mode selection. |
- The 3D distances are not considered. - A low performance analysis accuracy. | [22] | |
| Rayleigh | SIR | - Analyzing vehicle networks in orthogonal road systems. | - The 3D distances are not considered. - A low performance analysis accuracy. | [24] | ||
| Rayleigh | SIR STP | - Enabling characterization of diverse street geometries, including intersections and T-junctions. | - A low vehicles’ 2D distribution accuracy - A low performance analysis accuracy. | [28] | ||
| Rayleigh Rice | SINR | - Highlighting the buildings’ role in mitigating co-channel interference, improving V2V communication reliability at urban intersections. | - The 3D distances are not considered. - A low performance analysis accuracy. | [26] | ||
| 3-D | Nakagami | SINR Link Capacity | - A 3D representation of vehicular spatial position. | - A high-complexity performance analysis. | [29] | |
| Matern Hard-Core Point Processes | 1-D | Rayleigh | SINR | - The use of an accurate stochastic geometry process. | - A low performance analysis accuracy due to the use of Rayleigh channels and 1D modeling. | [30] |
| Notation | Definition |
|---|---|
| The ’s height | |
| The ’s height | |
| The threshold height | |
| a | The distance between and a given vehicle V |
| The obstacle vehicle’s height | |
| The maximum vehicle’s height | |
| The minimum vehicle’s height | |
| d | The 2D distance between and |
| r | The 3D distance between and |
| Case | Condition | Scenario |
|---|---|---|
| 1 | LoS | |
| 2 | LoS | |
| 3 | LoS | |
| 4 | LoS | |
| 5 | NLoS | |
| 6 | NLoS | |
| 7 | NLoS | |
| 8 | NLoS |
| Parameter | Value |
|---|---|
| N | 150 |
| 5 | |
| 5 GHz | |
| GHz | |
| 2 MHz | |
| 100 MHz | |
| 10 [dB] | |
| [dB] | |
| 2 | |
| 3 | |
| 2 | |
| C | |
| 1 | |
| 2 | |
| 1 | |
| 1 | |
| 2 | |
| 1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rjab, M.; Omri, A.; Bouallegue, S.; Chamkhia, H.; Bouallegue, R. Modeling and Performance Analysis of mmWave and WiFi-Based Vehicle Communications. Electronics 2024, 13, 1344. https://doi.org/10.3390/electronics13071344
Rjab M, Omri A, Bouallegue S, Chamkhia H, Bouallegue R. Modeling and Performance Analysis of mmWave and WiFi-Based Vehicle Communications. Electronics. 2024; 13(7):1344. https://doi.org/10.3390/electronics13071344
Chicago/Turabian StyleRjab, Mohamed, Aymen Omri, Seifeddine Bouallegue, Hela Chamkhia, and Ridha Bouallegue. 2024. "Modeling and Performance Analysis of mmWave and WiFi-Based Vehicle Communications" Electronics 13, no. 7: 1344. https://doi.org/10.3390/electronics13071344
APA StyleRjab, M., Omri, A., Bouallegue, S., Chamkhia, H., & Bouallegue, R. (2024). Modeling and Performance Analysis of mmWave and WiFi-Based Vehicle Communications. Electronics, 13(7), 1344. https://doi.org/10.3390/electronics13071344