
Non-Fragile Prescribed Performance Control of Robotic System without Function Approximation
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Unlike existing PPC strategies, control singularity occurs when bursts of interference cause tracking errors to be close to performance boundaries. In this paper, a non-fragility control strategy with a shift function is designed. When the error is close to the boundary, the shift function can adjust the error based on its own characteristics. Therefore, the aforementioned issues are avoided, and the tracking error can meet the prescribed performance.
- (2)
- Different from the existing methods that rely on adaptive laws, neural networks, or fuzzy logic systems to handle the nonlinear uncertainty of the system [24,25,26], the proposed approach does not require similar approximate constructions. This approach avoids the high complexity of controller design and offers better real-time performance.
- (3)
- The controller designed in this paper does not contain any prior knowledge of system nonlinearity, nor does it include the relevant boundary functions. This approach relaxes the key assumptions in the relevant literature [4,5]. This enhances the suitability of the controller and its robustness to system uncertainties.
2. Problem Statement
2.1. Robot Dynamics
2.2. Non-Fragile PPC Scheme
- (i)
- is continuous, when , and .
- (ii)
- is continuous and bounded on ; i.e., there exists an unknown positive constant such that .
3. Main Results
3.1. Controller Design
3.2. Stability Analysis
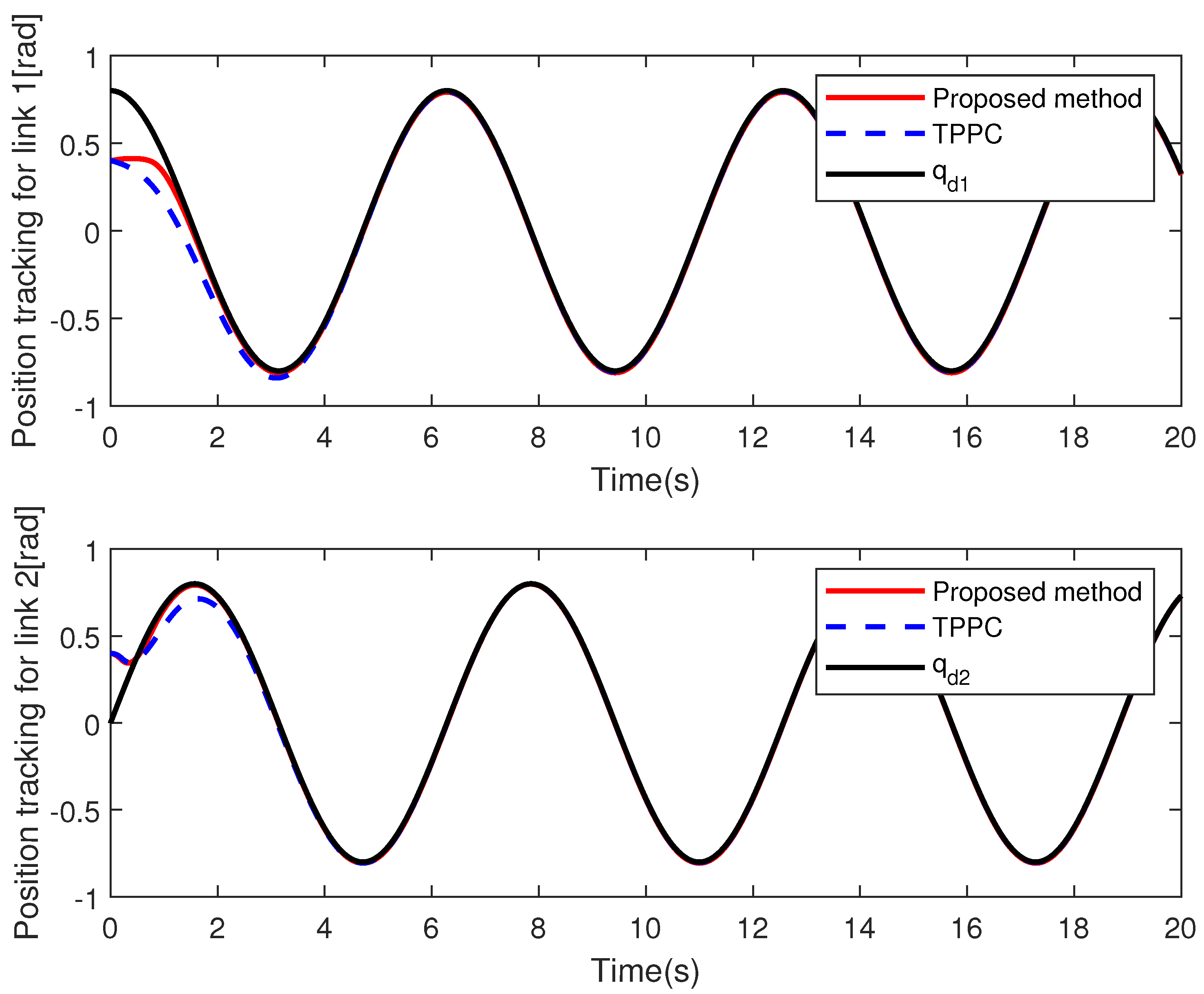
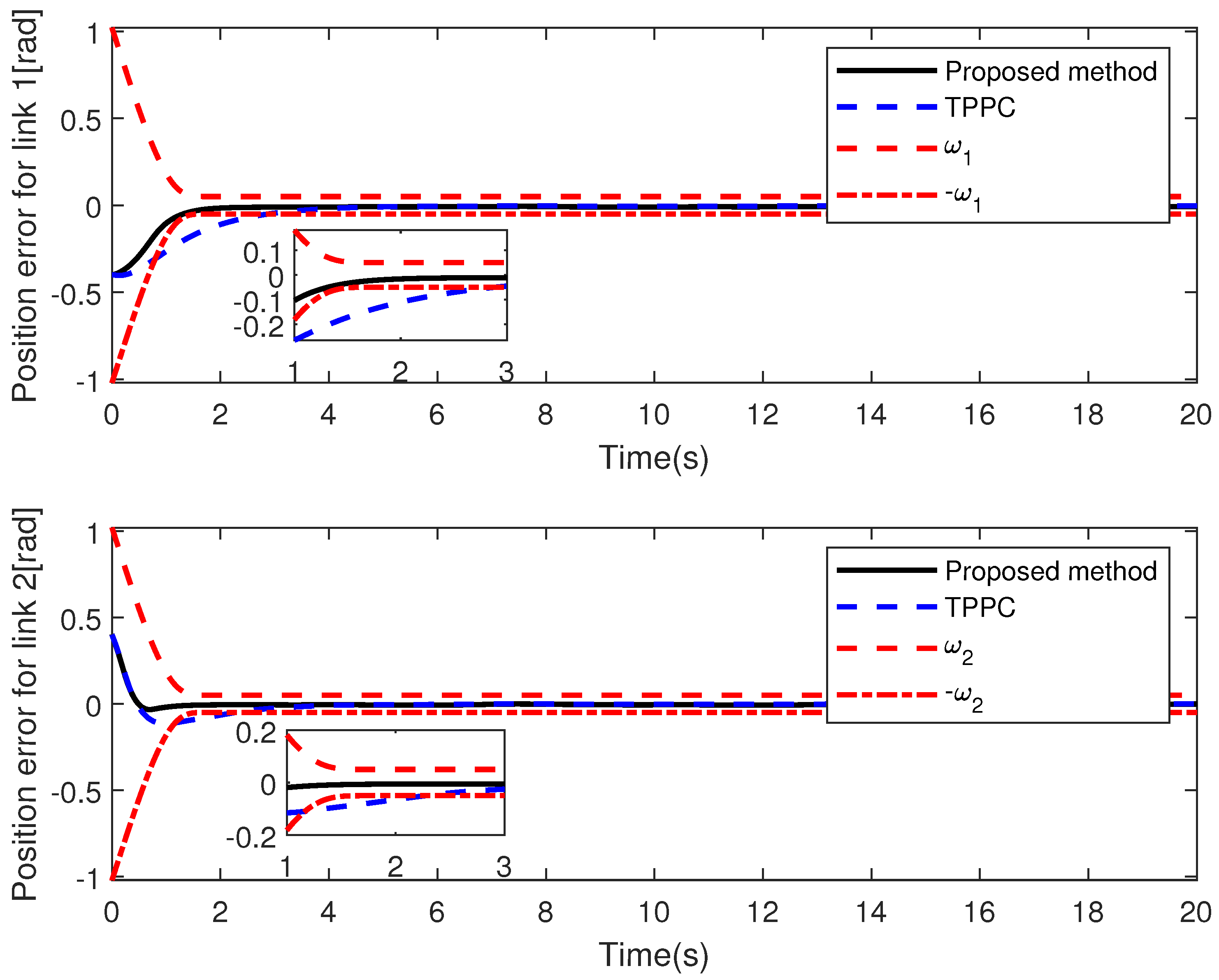
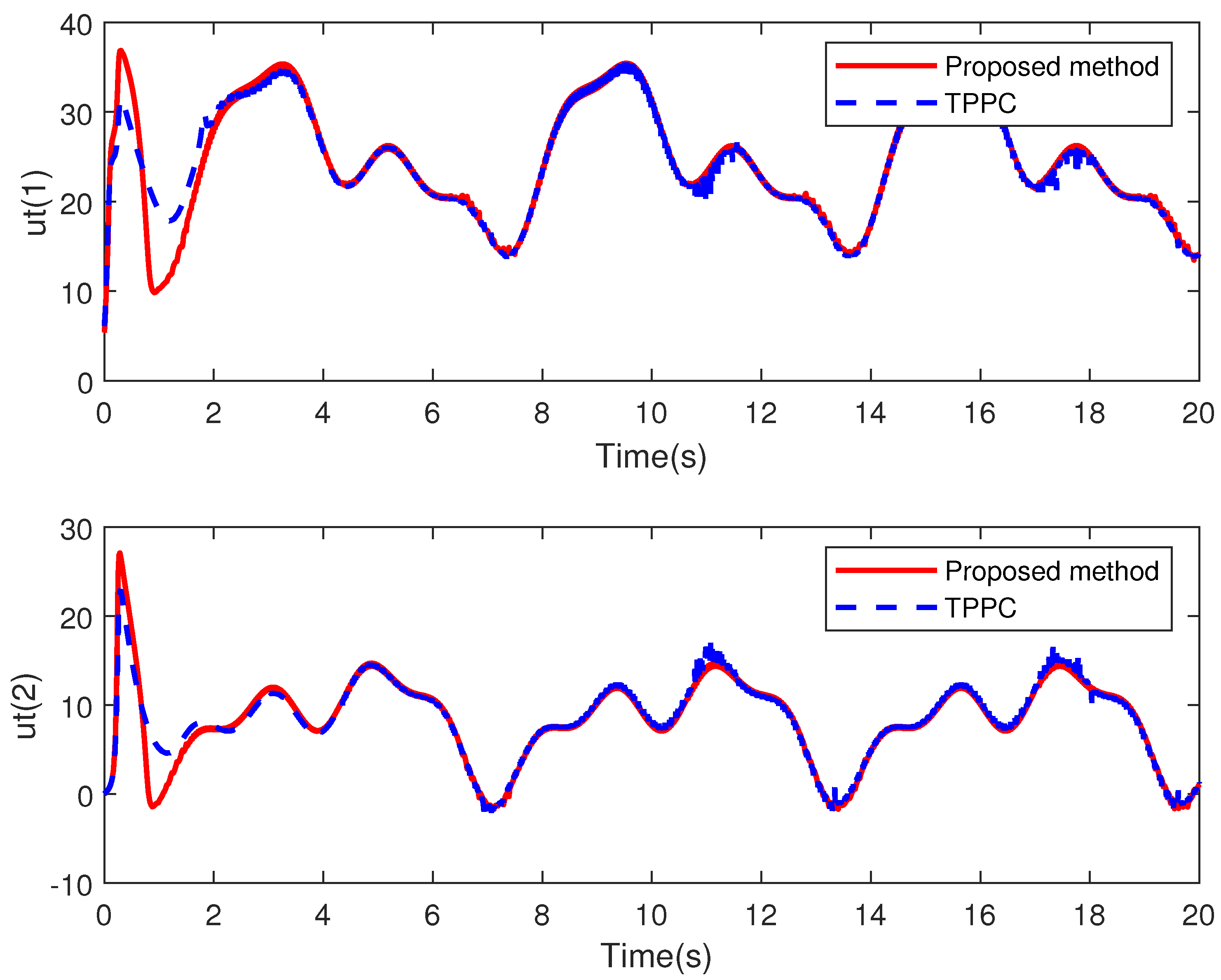
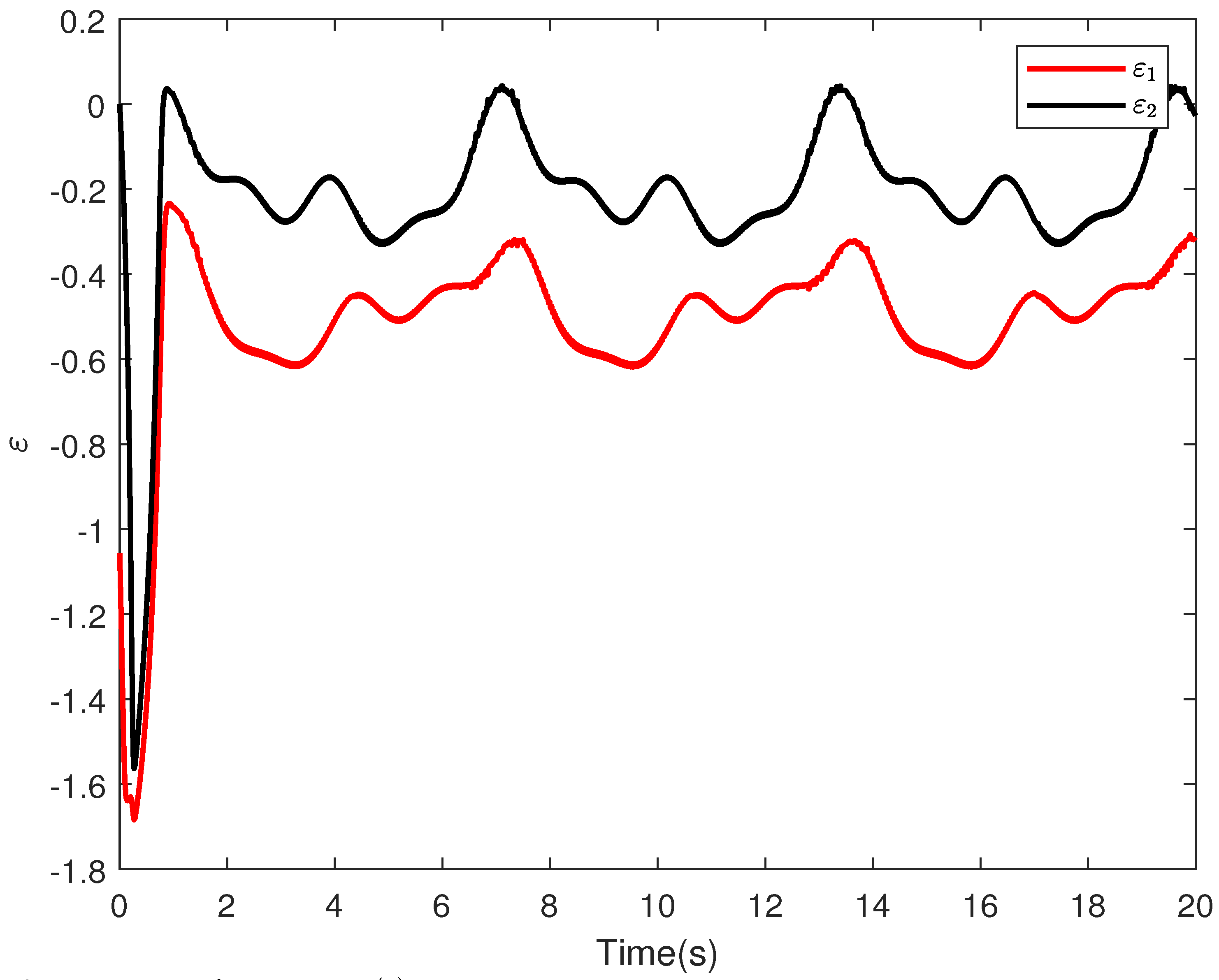
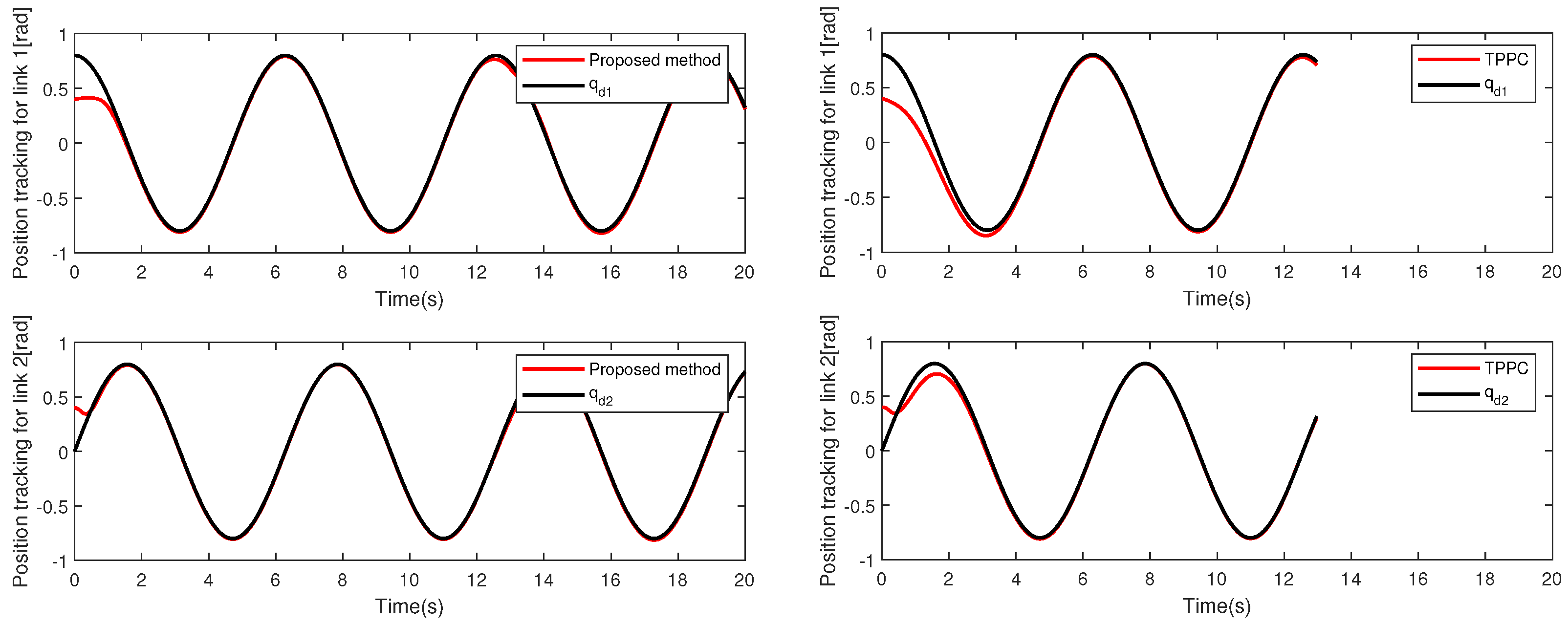
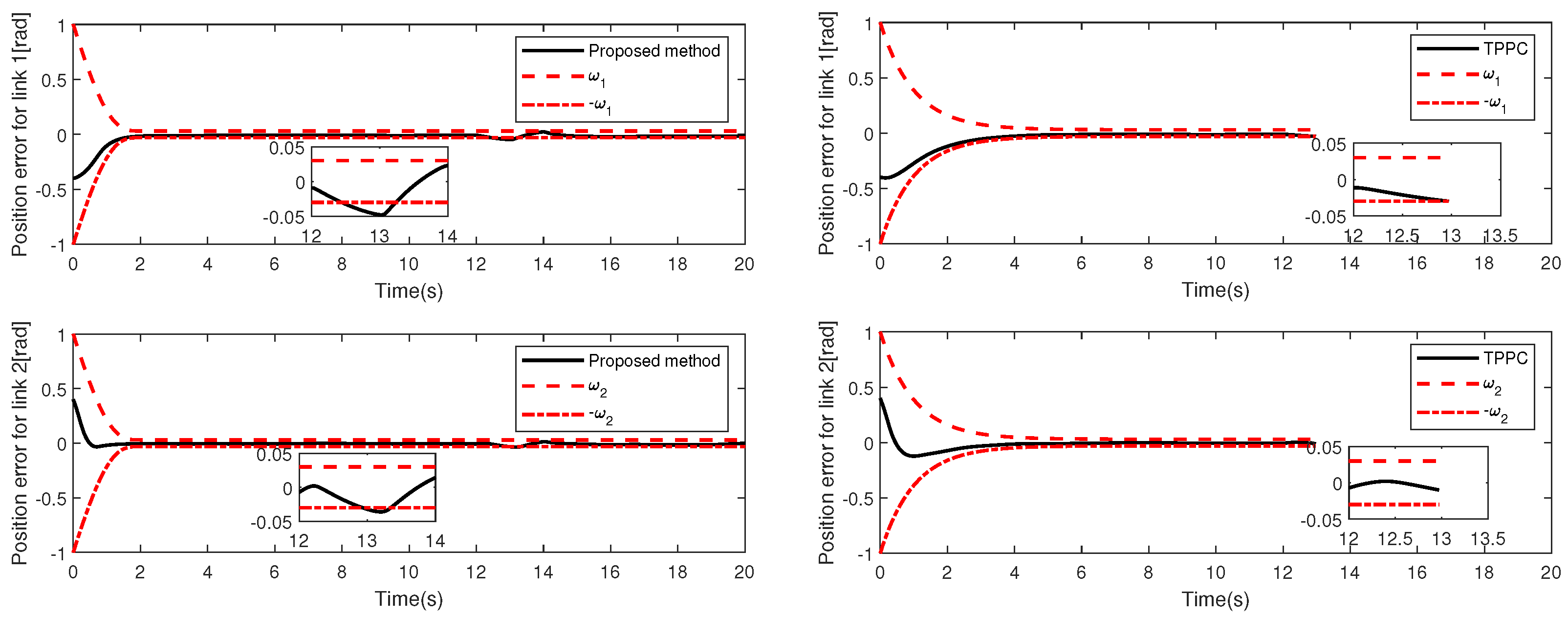
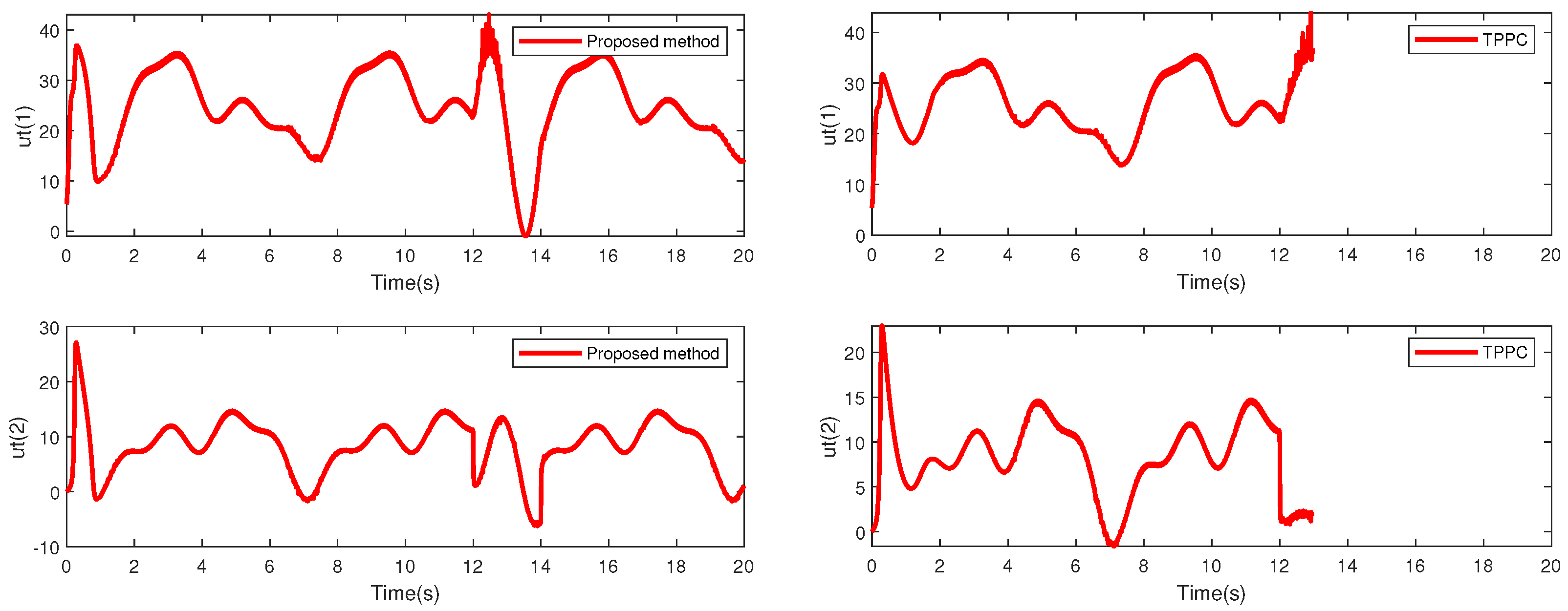
4. Simulation Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ferrara, A.; Incremona, G.P. Design of an integral suboptimal second-order sliding mode controller for the robust motion control of robot manipulators. IEEE Trans. Control. Syst. Technol. 2015, 23, 2316–2325. [Google Scholar] [CrossRef]
- Jin, M.; Kang, S.H.; Chang, P.H.; Lee, J. Robust control of robot manipulators using inclusive and enhanced time delay control. IEEE/ASME Trans. Mechatron. 2017, 22, 2141–2152. [Google Scholar] [CrossRef]
- Incremona, G.P.; Ferrara, A.; Magni, L. MPC for robot manipulators with integral sliding modes generation. IEEE/ASME Trans. Mechatron. 2017, 22, 1299–1307. [Google Scholar] [CrossRef]
- Yang, P.; Su, Y. Proximate fixed-time prescribed performance tracking control of uncertain robot manipulators. IEEE/ASME Trans. Mechatron. 2021, 27, 3275–3285. [Google Scholar] [CrossRef]
- Yang, P.; Su, Y.; Zhang, L. Proximate fixed-time fault-tolerant tracking control for robot manipulators with prescribed performance. Automatica 2023, 157, 111262. [Google Scholar] [CrossRef]
- Huang, H.; He, W.; Li, J.; Xu, B.; Yang, C.; Zhang, W. Disturbance observer-based fault-tolerant control for robotic systems with guaranteed prescribed performance. IEEE Trans. Cybern. 2020, 52, 772–783. [Google Scholar] [CrossRef] [PubMed]
- Vo, A.T.; Truong, T.N.; Kang, H.J. Fixed-Time RBFNN-Based Prescribed Performance Control for Robot Manipulators: Achieving Global Convergence and Control Performance Improvement. Mathematics 2023, 11, 2307. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y.; Song, Y.; Ao, W. Global consensus tracking control for high-order nonlinear multiagent systems with prescribed performance. IEEE Trans. Cybern. 2022, 53, 6529–6537. [Google Scholar] [CrossRef] [PubMed]
- Hu, H.; Chen, S.; Zhao, J.; Luo, J.; Jia, S.; Zhou, J.; Zhang, J.; Xiong, C.; Zhang, C.; Yang, G. Robust adaptive control of a bimanual 3T1R parallel robot with gray-box-model and prescribed performance function. IEEE/ASME Trans. Mechatron. 2022, 29, 466–475. [Google Scholar] [CrossRef]
- Khoshnam, S.; Ali, K.; Abbas, C. An observer-based neural adaptive PID2 controller for robot manipulators including motor dynamics with a prescribed performance. IEEE/ASME Trans. Mechatron. 2020, 26, 1689–1699. [Google Scholar]
- Khoshnam, S. Coordinated saturated output-feedback control of an autonomous tractor-trailer and a combine harvester in crop-harvesting operation. IEEE Trans. Veh. Technol. 2021, 71, 1224–1236. [Google Scholar]
- Huang, J.; Ri, S.; Fukuda, T.; Wang, Y. A disturbance observer based sliding mode control for a class of underactuated robotic system with mismatched uncertainties. IEEE Trans. Autom. Control. 2018, 64, 2480–2487. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.; Yao, X. Inverse-Dynamics-and disturbance-Observer-Based tube model predictive tracking control of uncertain robotic manipulator. J. Frankl. Inst. 2023, 360, 6906–6927. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, F.; Liu, Y.; Liu, H.; Huang, T.; Qiu, J. Reduced-order observer-based preassigned finite-time control of nonlinear systems and its applications. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4205–4215. [Google Scholar] [CrossRef]
- Guo, Z.; Ma, Q.; Guo, J.; Zhao, B.; Zhou, J. Performance-Involved Coupling Effect-Triggered Scheme for Robust Attitude Control of HRV. IEEE/ASME Trans. Mechatron. 2020, 25, 1288–1298. [Google Scholar] [CrossRef]
- Hu, Y.; Yan, H.; Zhang, Y.; Zhang, H.; Chang, Y. Event-Triggered Prescribed Performance Fuzzy Fault-Tolerant Control for Unknown Euler-Lagrange Systems With Any Bounded Initial Values. IEEE Trans. Fuzzy Syst. 2023, 31, 2065–2075. [Google Scholar] [CrossRef]
- Bu, X.; Lv, M.; Lei, H.; Cao, J. Fuzzy Neural Pseudo Control With Prescribed Performance for Waverider Vehicles: A Fragility-avoidance Approach. IEEE Trans. Cybern. 2023, 53, 4986–4999. [Google Scholar] [CrossRef] [PubMed]
- Bu, X.; Lei, H. A fuzzy wavelet neural network-based approach to hypersonic flight vehicle direct nonaffine hybrid control. Nonlinear Dyn. 2018, 94, 1657–1668. [Google Scholar] [CrossRef]
- Bu, X.; Qi, Q.; Jiang, B. A simplified finite-time fuzzy neural controller with prescribed performance applied to waverider aircraft. IEEE Trans. Fuzzy Syst. 2021, 30, 2529–2537. [Google Scholar] [CrossRef]
- Song, Y.; Tuo, Y.; Li, J. A neural adaptive prescribed performance controller for the chaotic PMSM stochastic system. Nonlinear Dyn. 2023, 111, 15055–15073. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y. Adaptive fuzzy finite-time stability of uncertain nonlinear systems based on prescribed performance. Fuzzy Sets Syst. 2019, 374, 23–39. [Google Scholar] [CrossRef]
- Bu, X.; Jiang, B.; Lei, H. Nonfragile quantitative prescribed performance control of waverider vehicles with actuator saturation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3538–3548. [Google Scholar] [CrossRef]
- Bu, X.; Jiang, B.; Lei, H. Low-complexity fuzzy neural control of constrained waverider vehicles via fragility-free prescribed performance approach. IEEE Trans. Fuzzy Syst. 2023, 31, 2127–2139. [Google Scholar] [CrossRef]
- Zhou, H.; Sui, S.; Tong, S. Finite-Time Adaptive Fuzzy Prescribed Performance Formation Control for High-Order Nonlinear Multiagent Systems Based on Event-Triggered Mechanism. IEEE Trans. Fuzzy Syst. 2022, 31, 1229–1239. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, Y.; Guo, G. Finite-time fault-tolerant prescribed performance control of connected vehicles with actuator saturation. IEEE Trans. Veh. Technol. 2022, 72, 1438–1448. [Google Scholar] [CrossRef]
- Deng, W.; Zhou, H.; Zhou, J.; Yao, J. Neural network-based adaptive asymptotic prescribed performance tracking control of hydraulic manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2022, 53, 285–295. [Google Scholar] [CrossRef]
- He, W.; Huang, H.; Ge, S.S. Adaptive neural network control of a robotic manipulator with time-varying output constraints. IEEE Trans. Cybern. 2017, 47, 3136–3147. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.X.; Yang, G.H. Fault-tolerant output-constrained control of unknown Euler–Lagrange systems with prescribed tracking accuracy. Automatica 2020, 111, 108606. [Google Scholar] [CrossRef]
- Zhang, L.; Su, Y.; Wang, Z. A simple non-singular terminal sliding mode control for uncertain robot manipulators. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 233, 666–676. [Google Scholar] [CrossRef]
- Liang, J.; Chen, Y.; Lai, N.; He, B.; Miao, Z.; Wang, Y. Low-complexity prescribed performance control for unmanned aerial manipulator robot system under model uncertainty and unknown disturbances. IEEE Trans. Ind. Inform. 2022, 18, 4632–4641. [Google Scholar] [CrossRef]
- Lu, M.; Liu, L.; Feng, G. Adaptive tracking control of uncertain Euler–Lagrange systems subject to external disturbances. Automatica 2019, 104, 207–219. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C.; Mercorelli, P. Robust approximate fixed-time tracking control for uncertain robot manipulators. Mech. Syst. Signal Process. 2020, 135, 106379. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Han, P.; Wu, Z.; Su, B.; Yang, J.; Shi, J. Non-Fragile Prescribed Performance Control of Robotic System without Function Approximation. Electronics 2024, 13, 1417. https://doi.org/10.3390/electronics13081417
Zhang J, Han P, Wu Z, Su B, Yang J, Shi J. Non-Fragile Prescribed Performance Control of Robotic System without Function Approximation. Electronics. 2024; 13(8):1417. https://doi.org/10.3390/electronics13081417
Chicago/Turabian StyleZhang, Jianjun, Pengyang Han, Zhonghua Wu, Bo Su, Jinxian Yang, and Juan Shi. 2024. "Non-Fragile Prescribed Performance Control of Robotic System without Function Approximation" Electronics 13, no. 8: 1417. https://doi.org/10.3390/electronics13081417