

Frequency-Selective Surface Based 360-Degree Beam-Steerable Cavity Antenna for UAV Swarm Coordination


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Antenna Design
2.1. Cavity Design
2.2. FSS Design
3. Discussion
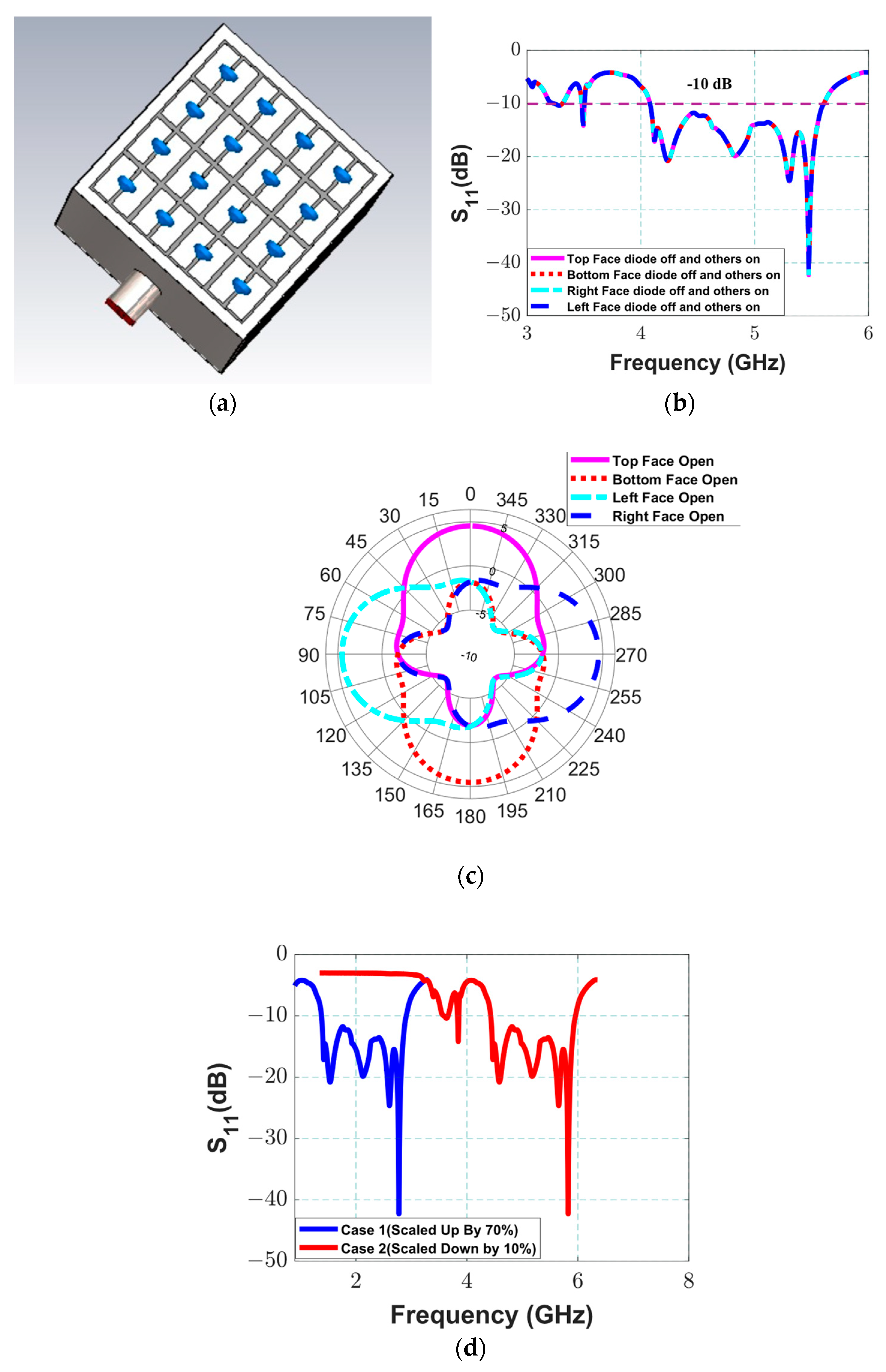
3.1. Complete FSS-Based Cavity Antenna Design
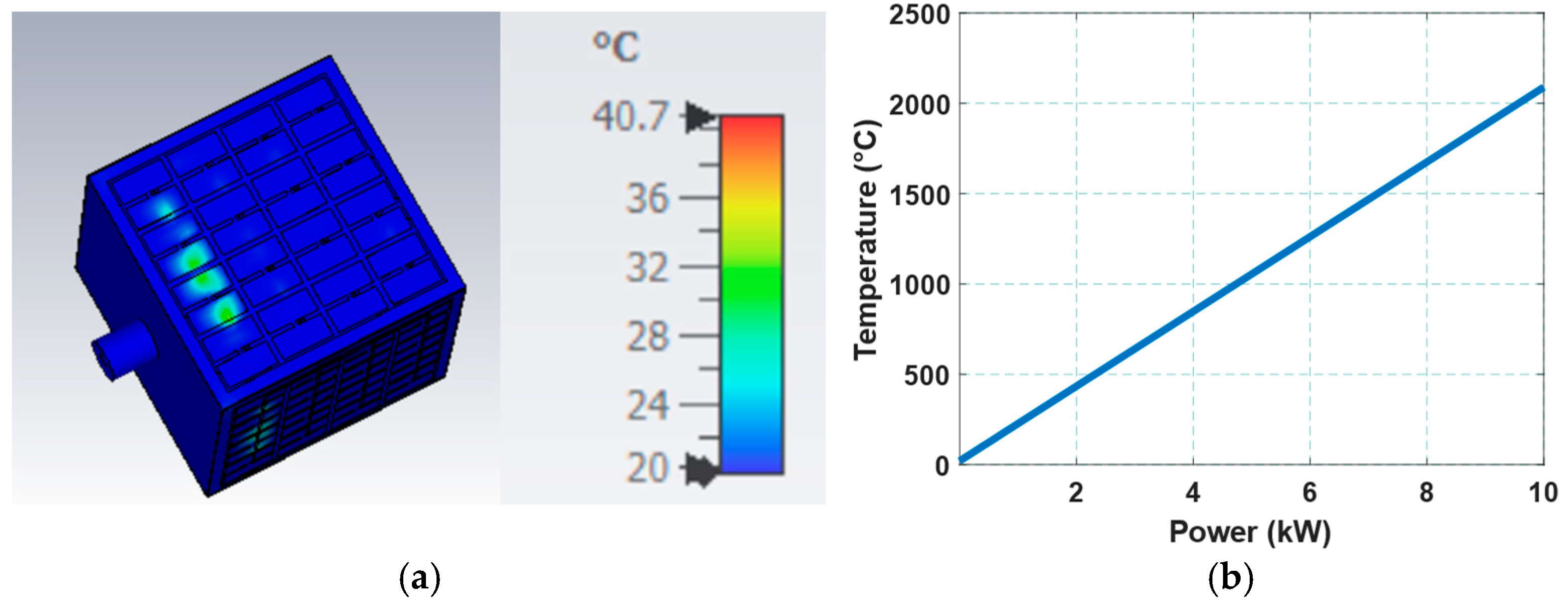
3.2. Antenna Power Handling Capability
3.2.1. Thermal Effect
3.2.2. Component Effect
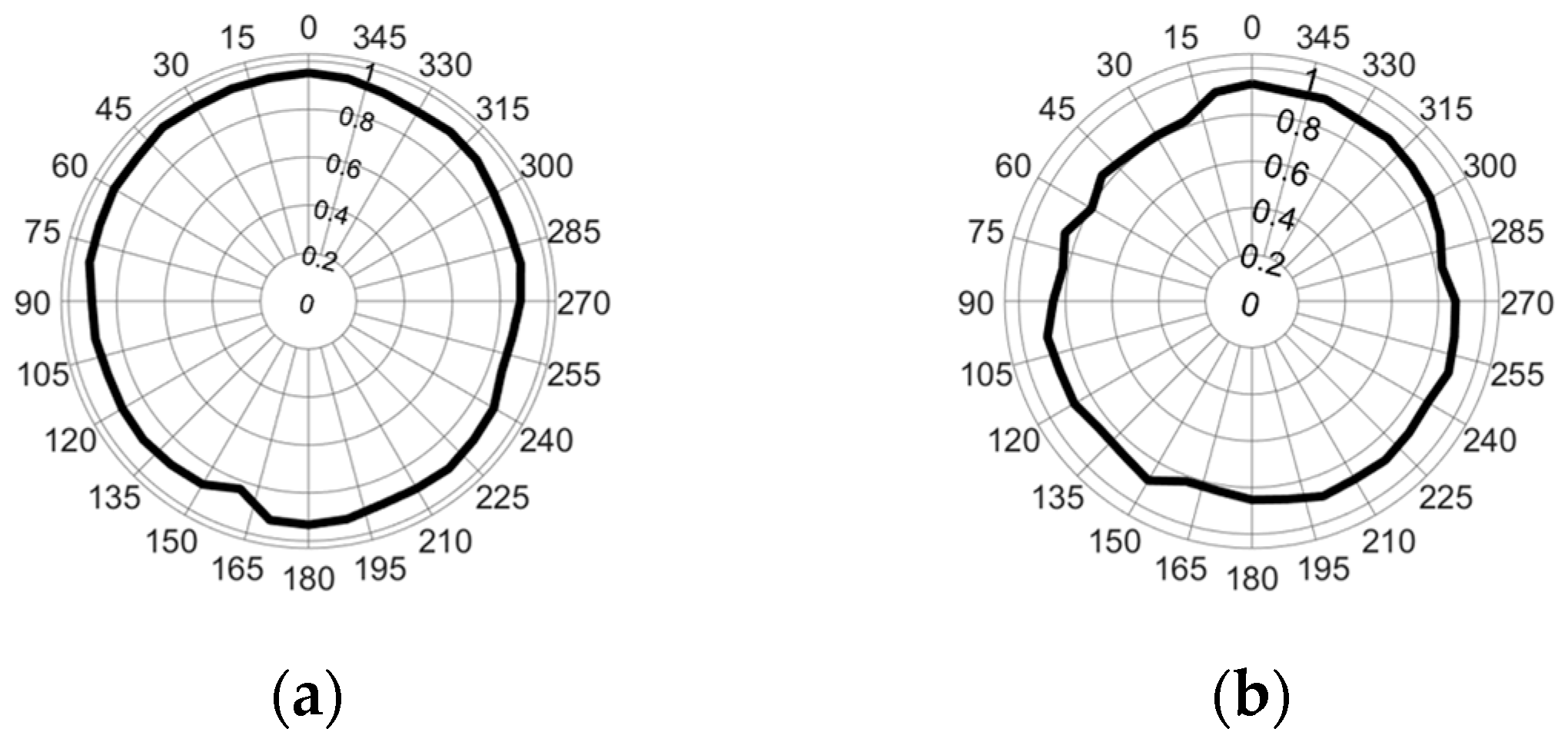
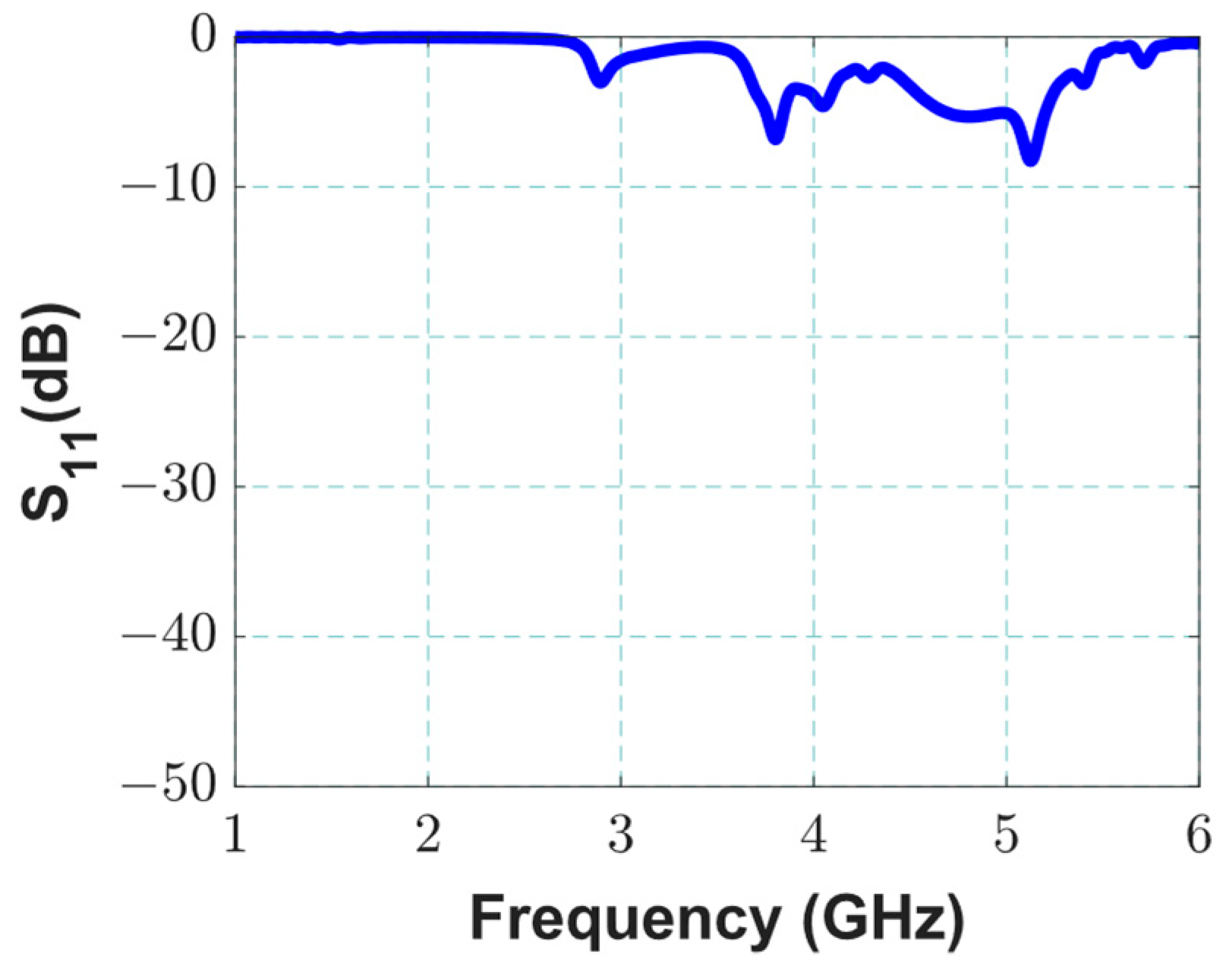
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FSS | Frequency-selective surface; |
| UAVs | Unmanned aerial vehicles; |
| SWaP | Size, weight, and power. |
References
- Kausar, S.; Kausar, A.; Mehrpouyan, H.; Hadi, M.U.; Tariq, S. Comparative analysis of smart beam-steering antennas for mm-wave communication systems & 5G. Prog. Electromagn. Res. B 2023, 98, 147–164. [Google Scholar] [CrossRef]
- Stroh, A.; Sigda, M.; Carbone, K.; Baun, D.; Tajin, A.S.; Bshara, O.; Pano, V.; Dandekar, K.R. A Pattern Reconfigurable Conformal mmWave Antenna for 5G Applications. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (APS/URSI), Singapore, 4–10 December 2021; pp. 1059–1060. [Google Scholar] [CrossRef]
- Goudarzi, A.; Honari, M.M.; Mirzavand, R. A Millimeter-Wave Fabry–Perot Cavity Antenna With Unidirectional Beam Scanning Capability for 5G Applications. IEEE Trans. Antennas Propag. 2022, 70, 1787–1796. [Google Scholar] [CrossRef]
- Zawad, M.; Hamdalla, M.Z.M.; Hassan, A.M. Different Geometrical Representations of Partially Reflected Surfaces for Fabry-Perot Antenna Optimization. In Proceedings of the 2024 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Boulder, CO, USA, 9–12 January 2024; pp. 314–315. [Google Scholar] [CrossRef]
- Kedze, K.E.; Wang, H.; Park, I. A Metasurface-Based Wide-Bandwidth and High-Gain Circularly Polarized Patch Antenna. IEEE Trans. Antennas Propag. 2021, 70, 732–737. [Google Scholar] [CrossRef]
- Qi, J.; Wang, Q.; Deng, F.; Zeng, Z.; Qiu, J. Low-Profile Uni-Cavity High-Gain FPC Antenna Covering Entire Global 2.4 GHz and 5 GHz WiFi-Bands Using Uncorrelated Dual-Band PRS and Phase Compensation AMC. IEEE Trans. Antennas Propag. 2022, 70, 10187–10198. [Google Scholar] [CrossRef]
- Li, W.T.; Cai, W.X.; He, J.G.; Hei, Y.Q.; Shi, X.W. Low-Profile Wideband Dual-Polarized Antenna for Millimeter-Wave Beam Steering Applications. IEEE Trans. Antennas Propag. 2023, 71, 7741–7751. [Google Scholar] [CrossRef]
- Hamdalla, M.Z.M.; Zawad, M.; Kunkle, M.; Baidya, S.; Allen, R.C.; Bland, P.J.; Fields, T.D.; Hassan, A.M. Design of a 3D Printed Wide Band Metasurface Antenna for High Power Applications. Prog. Electromagn. Res. M 2024, 128, 115–125. [Google Scholar] [CrossRef]
- Zawad, M.; Hamdalla, M.Z.M.; Durbhakula, K.; Hassan, A.M. Performance Comparison of Different Phase-Gradient Metasurface Unit Cells for Wide Angle Beam Steering Applications. In Proceedings of the 2024 International Applied Computational Electromagnetics Society Symposium (ACES), Orlando, FL, USA, 19–22 May 2024; pp. 1–2. Available online: https://ieeexplore.ieee.org/abstract/document/10580077 (accessed on 24 July 2024).
- Fernandez, M.G.; Lopez, Y.A.; Andres, F.L.-H. On the Use of Unmanned Aerial Vehicles for Antenna and Coverage Diagnostics in Mobile Networks. IEEE Commun. Mag. 2018, 56, 72–78. [Google Scholar] [CrossRef]
- Javed, S.; Hassan, A.; Ahmad, R.; Ahmed, W.; Ahmed, R.; Saadat, A.; Guizani, M. State-of-the-Art and Future Research Challenges in UAV Swarms. IEEE Internet Things J. 2024, 11, 19023–19045. [Google Scholar] [CrossRef]
- Harmer, S.W.; De Novi, G. Distributed Antenna in Drone Swarms: A Feasibility Study. Drones 2023, 7, 126. [Google Scholar] [CrossRef]
- Chen, W.; Zhu, J.; Liu, J.; Guo, H. A fast coordination approach for large-scale drone swarm. J. Netw. Comput. Appl. 2023, 221, 103769. [Google Scholar] [CrossRef]
- Shlezinger, N.; Alexandropoulos, G.C.; Imani, M.F.; Eldar, Y.C.; Smith, D.R. Dynamic Metasurface Antennas for 6G Extreme Massive MIMO Communications. IEEE Wirel. Commun. 2021, 28, 106–113. [Google Scholar] [CrossRef]
- Reis, J.R.; Vala, M.; Caldeirinha, R.F.S. Review Paper on Transmitarray Antennas. IEEE Access 2019, 7, 94171–94188. [Google Scholar] [CrossRef]
- Ahmed, F.; Singh, K.; Esselle, K.P. State-of-the-Art Passive Beam-Steering Antenna Technologies: Challenges and Capabilities. IEEE Access 2023, 11, 69101–69116. [Google Scholar] [CrossRef]
- Sanchez-Olivares, P.; Sanchez-Dancausa, P.; Masa-Campos, J.L.; Iglesias-Menendez-De-La-Vega, M.; Garcia-Marin, E. Circular Conformal Array Antenna With Omnidirectional and Beamsteering Capabilities for 5G Communications in the 3.5-GHz Range [Wireless Corner]. IEEE Antennas Propag. Mag. 2019, 61, 97–108. [Google Scholar] [CrossRef]
- Wang, M.; Hu, Y.; Shi, T.; Chen, Z.; Chen, S.-L.; Tian, Z. A Wideband Conformal Array Antenna With Dual-Polarized Transmission and Reflection Element for Full-Space Beam-Scanning Capability. IEEE Antennas Wirel. Propag. Lett. 2024, 23, 1829–1833. [Google Scholar] [CrossRef]
- Peng, J.-J.; Qu, S.-W.; Xia, M.; Yang, S. Conformal Phased Array Antenna for Unmanned Aerial Vehicle With ±70° Scanning Range. IEEE Trans. Antennas Propag. 2021, 69, 4580–4587. [Google Scholar] [CrossRef]
- Li, M.; Chen, S.-L.; Liu, Y.; Guo, Y.J. Wide-Angle Beam Scanning Phased Array Antennas: A Review. IEEE Open J. Antennas Propag. 2023, 4, 695–712. [Google Scholar] [CrossRef]
- Ren, H.; Sun, Z.; Yang, J.; Xiao, Y.; An, H.; Li, Z.; Wu, J. Swarm UAV SAR for 3-D Imaging: System Analysis and Sensing Matrix Design. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 3221775. [Google Scholar] [CrossRef]
- Lee, H.; Kim, Y.-B.; Lee, H.L. Reconfigurable Antenna for UAV-Assisted Wide Coverage Air-to-Ground Communications. IEEE Access 2022, 10, 88034–88042. [Google Scholar] [CrossRef]
- Feng, X.; Boutayeb, H.; Hyjazie, F.; Zhai, W.; Wessel, D.; Tong, W. 360-degree beam steering antenna based on subsrate integrated frequency selective structure. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (APS/URSI), Singapore, 4–10 December 2021; pp. 543–544. [Google Scholar] [CrossRef]
- Zhang, L.-M.; Ding, X.; Shao, W. A Phase Compensation Beam Switching Antenna Based on Frequency Selective Surface. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1741–1744. [Google Scholar] [CrossRef]
- Kolluru, C.; Zawad, M.; Durbhakula, K.; Fields, T.; Hassan, A.M.; Hamdalla, M.Z.M. Design of A Cavity-Backed 360° Beam Steerable Antenna for 5G Wireless Communication. In Proceedings of the 2024 International Applied Computational Electromagnetics Society Symposium (ACES), Orlando, FL, USA, 19–22 May 2024; pp. 1–2. Available online: https://ieeexplore.ieee.org/abstract/document/10580167 (accessed on 24 July 2024).
- Zhang, R.; Wu, W.; Chen, X.; Gao, Z.; Cai, Y. Terahertz Integrated Sensing and Communication-Empowered UAVs in 6G: A Transceiver Design Perspective. IEEE Veh. Technol. Mag. 2025, 2–11. [Google Scholar] [CrossRef]
- Muzalevskiy, K. LPDA Calibration Using an UAV for Synthesizing UWB Impulses. IEEE Antennas Wirel. Propag. Lett. 2023, 22, 2140–2144. [Google Scholar] [CrossRef]
- CST Studio Suite. Dassault Systèmes. Available online: https://www.3ds.com/products/simulia/cst-studio-suite (accessed on 26 March 2025).
- Li, J.; Zeng, Q.; Liu, R.; Denidni, T.A. A Compact Dual-Band Beam-Sweeping Antenna Based on Active Frequency Selective Surfaces. IEEE Trans. Antennas Propag. 2017, 65, 1542–1549. [Google Scholar] [CrossRef]
- Quintero, G.; Zurcher, J.-F.; Skrivervik, A.K. System Fidelity Factor: A New Method for Comparing UWB Antennas. IEEE Trans. Antennas Propag. 2011, 59, 2502–2512. [Google Scholar] [CrossRef]
- de León, G.Q.D. Analysis and Design of Ultra-Wideband Antennas in the Spectral and Temporal Domains. Doctoral Dissertation, EPFL, Lausanne, Switzerland, 2010. [Google Scholar] [CrossRef]
- Jie, H.; Zhao, Z.; Li, H.; Gan, T.H.; See, K.Y. A Systematic Three-Stage Safety Enhancement Approach for Motor Drive and Gimbal Systems in Unmanned Aerial Vehicles. IEEE Trans. Power Electron. 2025, 40, 9329–9342. [Google Scholar] [CrossRef]
- Jie, H.; Zhao, Z.; Zeng, Y.; Chang, Y.; Fan, F.; Wang, C.; See, K.Y. A review of intentional electromagnetic interference in power electronics: Conducted and radiated susceptibility. IET Power Electron. 2024, 17, 1487–1506. [Google Scholar] [CrossRef]
- Hamdalla, M.Z.M.; Bissen, B.; Hunter, J.D.; Liu, Y.; Khilkevich, V.; Beetner, D.G.; Caruso, A.N.; Hassan, A.M. Characteristic Mode Analysis Prediction and Guidance of Electromagnetic Coupling Measurements to a UAV Model. IEEE Access 2021, 10, 914–925. [Google Scholar] [CrossRef]
- Li, J.; Alvestegui, D.G.-G.; Rodriguez-Morales, F.; Leuschen, C. Testing and Assessment of Small Unmanned Aerial Vehicle Susceptibility to Environmental Radio Frequency Interference. IEEE Trans. Electromagn. Compat. 2024, 66, 728–748. [Google Scholar] [CrossRef]
- SMP1340-079LF Skyworks Solutions, Inc.|Mouser. Available online: https://www.mouser.com/ProductDetail/Skyworks-Solutions-Inc/SMP1340-079LF?qs=WMHGlxXAKT%252Bsrre7lC%252BE7g%3D%3D&srsltid=AfmBOoo_BX4EnhoEsXnsv86oLxTa2OpDHq07YtWElsv24qcaD9QFKo3H (accessed on 28 March 2025).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zawad, M.; Kolluru, C.; Rana, S.; Durbhakula, K.C.; Hamdalla, M.Z.M. Frequency-Selective Surface Based 360-Degree Beam-Steerable Cavity Antenna for UAV Swarm Coordination. Electronics 2025, 14, 1725. https://doi.org/10.3390/electronics14091725
Zawad M, Kolluru C, Rana S, Durbhakula KC, Hamdalla MZM. Frequency-Selective Surface Based 360-Degree Beam-Steerable Cavity Antenna for UAV Swarm Coordination. Electronics. 2025; 14(9):1725. https://doi.org/10.3390/electronics14091725
Chicago/Turabian StyleZawad, Mashrur, Chandana Kolluru, Sohel Rana, Kalyan C. Durbhakula, and Mohamed Z. M. Hamdalla. 2025. "Frequency-Selective Surface Based 360-Degree Beam-Steerable Cavity Antenna for UAV Swarm Coordination" Electronics 14, no. 9: 1725. https://doi.org/10.3390/electronics14091725
APA StyleZawad, M., Kolluru, C., Rana, S., Durbhakula, K. C., & Hamdalla, M. Z. M. (2025). Frequency-Selective Surface Based 360-Degree Beam-Steerable Cavity Antenna for UAV Swarm Coordination. Electronics, 14(9), 1725. https://doi.org/10.3390/electronics14091725