1. Introduction
Emerging technologies, such as vehicle-to-vehicle communications (V2V) [
1], in-car cellular (online) connectivity [
2] and increased computational prowess of embedded processors, are heralding a revolutionary change in car design and driver assistance systems. These technologies will play a key role in the development of self-driving cars in the near future [
3,
4]. A key component of advanced driver assistance systems is traffic sign recognition (TSR) that enables the car to recognize the road signs in real-world environments. Successful detection and recognition of traffic signs can be used to alert the driver and/or to facilitate autonomous driving operations. The main challenge for robust detection performance comes from the complexity of the environment, such as lighting conditions, weather conditions, similar color background and occlusions. A reliable and robust TSR system that can overcome those cases/circumstances should be considered as a priority. Besides reliability, real-time operation is another challenge for the TSR system. A system that can provide sign information even at high traveling speeds is necessary for driver assistance systems.
In this work, a new TSR algorithm flow is proposed, which performs exceptionally robustly against environmental challenges, such as partially-obscured, rotated and skewed signs. Another critical component is the embedded system implementation of the algorithm on a programmable logic device that can enable real-time operation. The proposed work is based on earlier research [
5,
6], which introduced a programmable hardware platform for TSR. This study shares the sign detection steps, but introduces a new sign recognition algorithm based on feature extraction and classification steps and its corresponding hardware implementation.
In general, TSR systems are comprised of two parts: sign detection and sign recognition/classification. Many approaches for sign detection are based on color space information. In [
7], a summary is given for color space threshold methods, including the RGB normalized threshold [
8], the hue saturation threshold [
9], the hue saturation enhancement threshold [
10] and the space threshold [
11]. For sign recognition [
12], several feature extraction methods have been proposed, including Canny edge detection [
13], scale invariance feature (SIFT) [
14] and, more recently, speeded-up robust feature (SURF) [
15]. HOG (histogram of oriented gradients) can also be used as features, as shown in [
16,
17]. Typically, features are extracted for the subsequent machine learning stage, which is used for the sign classification. Support vector machine (SVM) [
18] and neutral networks [
19] are popular classifiers based on such techniques.
In recent years, a great variety of hardware solutions for real-time TSR has been proposed. These include conventional (general purpose) computers [
20], custom ASIC (application-specific integrated circuit) chips [
21], field programmable gate arrays (FPGAs) [
22,
23,
24,
25], digital signal processors (DSPs) [
26] and also graphic processing units [
27]. Although it is difficult to make a direct comparison due to differences in the TSR algorithms employed, the following section discusses the motivation and outcomes of these hardware architectures with respect to the proposed hardware/software solution.
In [
20], a software-based solution running on a Linux system with a 2.4-GHz dual core CPU is presented. The algorithm implements color processing and feature matching and is shown to have 95% accuracy. However, their traffic sign set is limited to only 20 signs, and the PC platform is not an embedded system that can be integrated into a car. In [
21], a low power 0.13-μm ASIC chip has been presented for traffic sign detection, incorporating an image enhancement preprocessor and a sign recognition preprocessor. The image enhancement preprocessor uses the MSR (multi-scale retinex) algorithm, providing a robust image, adaptable to light and dark conditions. It uses neural-fuzzy logic to control the parameters of the MSR algorithm, and the recognition processor uses a support vector search engine for classification. Although the chip performs well, it is considered to be a very costly solution due to the inflexibility of the ASIC platform for any post-silicon changes. FPGAs, on the other hand, provide unlimited reconfigurability as a hardware platform, and they are increasingly popular choices for TSR implementations. In [
22], a SURF detector has been implemented on Kintex-7 FPGA, which is claimed to achieve a frame rate at 60 fps at 800 × 600 resolution. However, no information regarding the traffic sign recognition algorithm or relevant detection performance are given in the paper. The architecture given in [
23] uses HOG features and the SVM classifier. The classification accuracy is 93.77%. However, the absence of any preprocessing step (sign detection) in the algorithm makes it difficult to recognize a potential sign in a raw image, and the effective accuracy is lower. Another FPGA architecture given in [
24] uses a multi-core SoC implementation, targeting a latency of less than 600 ms (maximum latency for a car traveling at a speed of 180 km/h). Specifically, a Gaisler/Pender Electronics FPGA board, GR-CPCI-XC4V [
28], is used for hosting a dual core LEON-3 processor and realizing a dedicated hardware accelerator for the support vector machine kernel used in the TSR algorithms. This is a very expensive prototype board and not feasible for production purposes. In [
25], a TSR system is implemented on a Spartan-6-FPGA and includes color-based sign detection and feature-based classification steps, similar to our work, but their system is only capable of detecting speed limit signs. Many industry TSR solutions, such as cars manufactured by BMW and Mercedes, are also limited to speed limit signs [
29]. In [
26], an automated sign detection algorithm has been implemented using a TI OMAP L138 DSP chip. The DSP solution is shown to achieve an execution time of 300 ms for both detection and recognition parts. However, the recognition part is based on template matching, which would generally fail for tilted, rotated and partially-obscured traffic signs, unlike the feature matching algorithm in our proposed system. Finally, a GPU (graphical processor unit)-based solution is proposed in [
27]. At the software level, the authors have used parallel processing to improve the efficiency of computing. An average frame rate of 21 fps is achieved by the GPU (~50-ms latency), which presents a good alternative to FPGAs due to the programmability of GPUs, but generally, the cost and power consumption of GPUs are very high.
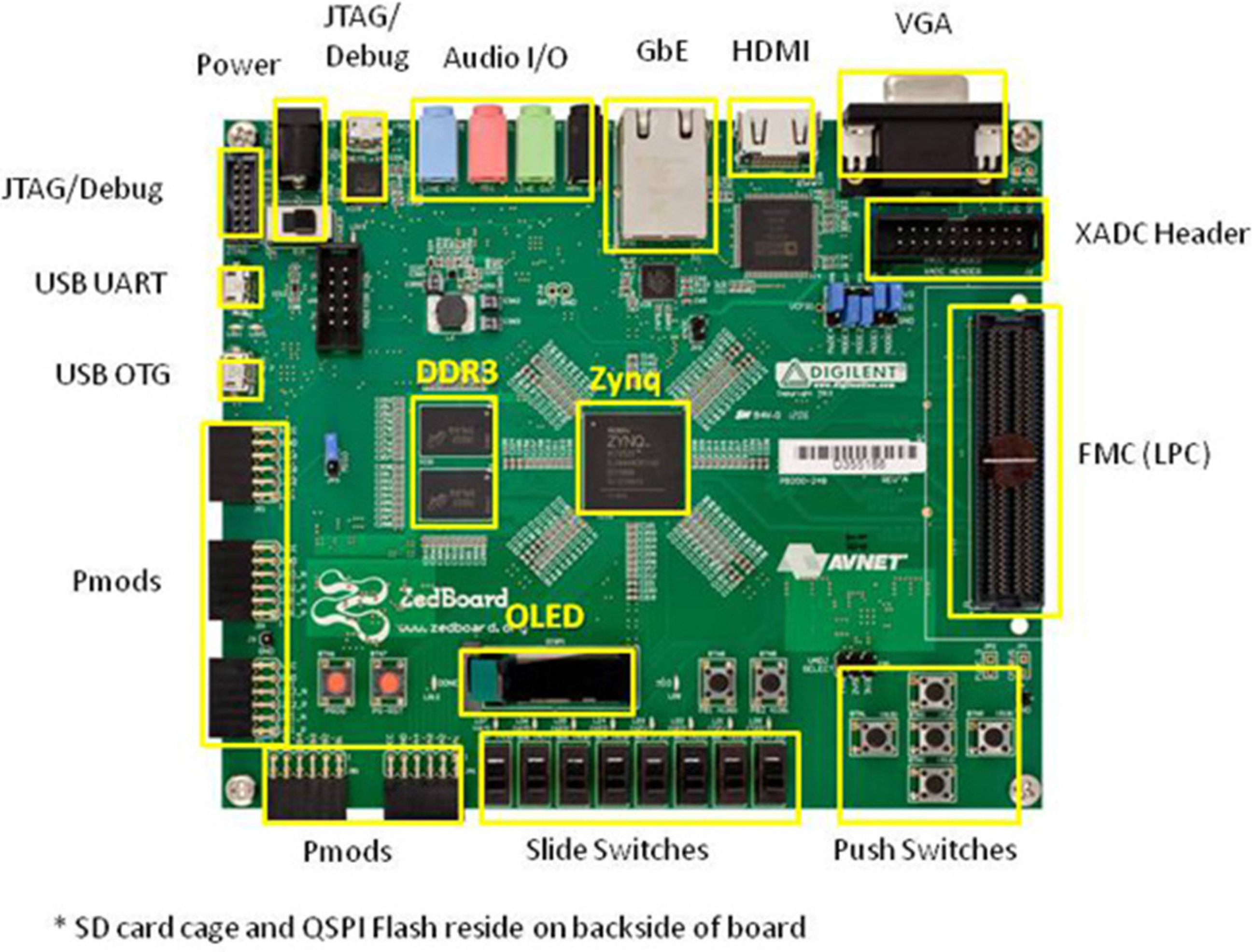
The TSR system presented in this work is unique due to a balanced approach in the software and hardware components. TSR algorithm has robust recognition performance (i.e., tolerates rotated, tilted, shifted and even obscured signs); it supports all traffic signs (not just speed limit signs); it can be easily expanded to different regional traffic sign sets (belonging to different countries or states) by training; and it is computationally efficient. The target hardware platform, the Zynq FPGA, is a low cost, low power and flexible system that provides fast development due to embedded ARM processor cores and the reconfigurable logic blocks. It can also be integrated into automotive embedded systems.
The rest of the paper is organized as follows: In
Section 2, color-based sign detection is described, and the SURF detection algorithm is introduced. New feature extraction methods are explained.
Section 3 discusses the FPGA platform and the system components. Finally, experimental results for evaluating the detection accuracy are shown in
Section 4, and hardware performance results are given.
2. Algorithm Overview
The task of traffic sign recognition can be divided into two sub-tasks of detection and classification. Detection is the response of finding the region of interest that could contain a traffic sign. Classification takes the challenge of identifying if these candidates are truly traffic signs and classifying them.
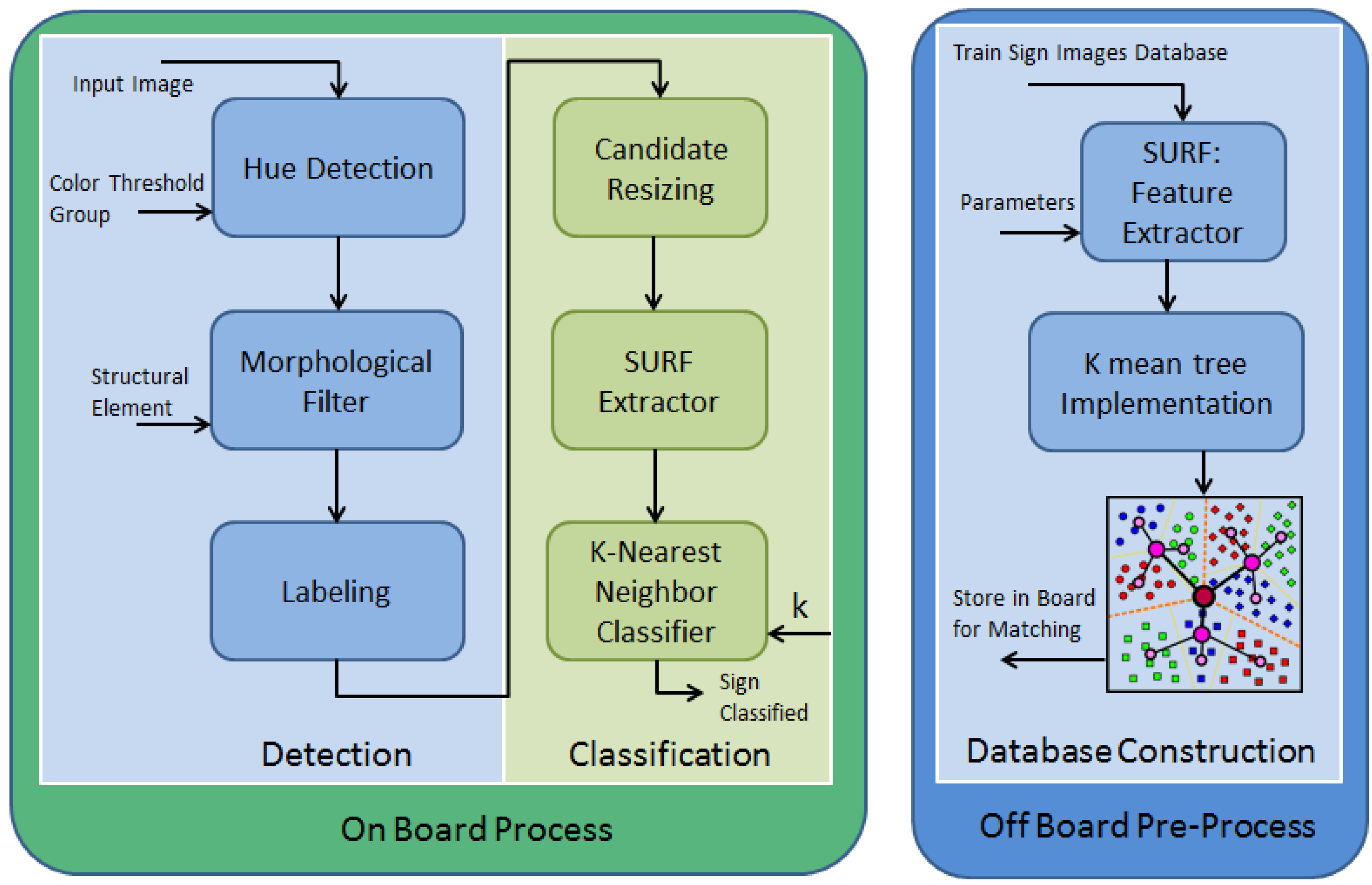
Figure 1 presents the proposed algorithm used for sign detection and classification. The main goal of this work is to design a fast, robust and reliable TSR system. To overcome the challenges mentioned above, the algorithms are chosen carefully. The presentation of the image is transferred from the RGB space to the hue/saturation/intensity space to achieve lighting invariance. To make the system invariant to rotation and skew, the SURF detector is adopted to extract the feature for matching. To achieve real-time sign recognition, an FPGA-based implementation is utilized in order to map the entire algorithm into hardware acceleration. As shown in
Figure 1, the algorithms implemented as hardware acceleration include hue detection, morphological filter, labeling and scaling, while feature extraction and nearest neighbor search are done on an embedded CPU core.
Figure 1.
System flowchart for the proposed traffic sign recognition (TSR) algorithm. The green section (left) highlights detection and classification operations executed on an embedded system (FPGA). The blue section (right) shows the training steps executed on a PC.
Figure 1.
System flowchart for the proposed traffic sign recognition (TSR) algorithm. The green section (left) highlights detection and classification operations executed on an embedded system (FPGA). The blue section (right) shows the training steps executed on a PC.
The original input image is transferred from the RGB domain to the HSI (hue, saturation and intensity) domain. By mapping the values with the hue color wheel in HSI, pixels can be categorized as a particular color, such as red or yellow. Then, morphological filters (opening and closing steps) are applied, which are used to eliminate the noise from the single or small group of red pixels. The rest of the positive pixel groupings are labeled as the potential signs. The labeling process identifies a square block for each and every pixel grouping in the image. The labeled pixel groupings are candidates for possible traffic signs. Among these candidates, most of them are too small, that they may not contain enough information for candidate matching. Hence, these non-feasible candidates need to be filtered out by calculating their height and width. Only those candidates that contain enough resolution are considered as good candidates. The subsequent steps deal with the second part of the TSR algorithm: the sign classification part. The possible traffic sign candidates are scaled into a certain resolution, and features are extracted by the SURF detector. These features are used to perform nearest neighbor search (or other machine learning algorithms) with the training database for classification. If the matching condition is satisfied, it will be classified as the equivalent traffic sign. The algorithms mentioned above are implemented on a Xilinx FPGA board. An example of the off board process required to prepare the database for sign classification is shown in
Figure 1. Training images are captured for feature extraction. To accelerate the searching speed, the features are constructed into a
k-means tree structure and stored in the board. The following sections provide more details about the algorithms.
2.1. Color-Based Segmentation
Sign detection is primarily finding the region of interesting (ROI) that may contain signs. One of the most popular methods is color-based segmentation. A traffic sign is usually designed with a single background color, e.g., red, yellow or blue, which can be easily distinguished from the environment. Images are usually displayed in the RGB color model, in which red, green and blue light are combined together to reproduce a broad array of colors. RGB is very useful when displaying colors and widely used in our input/output devices, like cameras, scanners and color TV. Using RGB directly is considered as the simplest way for color segmentation. However, the three color components used to present red, green and blue pixels are highly correlated and also easily affected by illumination conditions. The same color, under different saturation levels or light, may cause an almost random variance of RGB values.
2.1.1. Color Detection
In this paper, color-based segmentation in the HSI space is taken. HSI represents a pixel by its hue, saturation and intensity. The hue component describes the color itself in the form of an angle between [0, 360] degrees. Zero degrees means red; 120 means green; 240 means blue; 60 degrees is yellow; 300 degrees is magenta. The saturation component signals how much the color is polluted with white color. The range of the S component is [0, 1], if the RGB value has been normalized to [0, 1]. The Intensity range is between [0, 1], and zero means black and one white, if the RGB value has been normalized to [0, 1].
Given an image in RGB format, the H component of each pixel is obtained using the equation [
30]:
with:
A fast version is given by [
31]:
The saturation and intensity can be calculated by equation [
32]:
Once the conversion is made, the hue values for each pixel can be used for detection. Detection is the process of identifying a pixel whose hue value falls in a certain range of the hue wheel. Then, the image can be split into two components: pixels that have the color of interest and those that do not. A binary image can be created by flagging each pixel as to whether it belongs to the color of interest or not. According to [
7], the red, yellow, blue and white colors can be detected by the following Equation (6) with the thresholds listed in
Table 1:
Table 1.
Color detection thresholds [
7].
Table 1.
Color detection thresholds [7].
| Color | Threshold Values |
|---|
| Red | |
| Blue | |
| Yellow | |
| White | |
2.1.2. Morphological Filters
In the binary image created above, not all pixels are part of the traffic signs. Much spark noise sometimes spreads on the image. Leaving them without any processing will only cause them to propagate to the next level and harm the detection performance. Hence, the image has to be filtered. For this spark noise, such as single dots or small pixel blobs, a morphological filter is an easy and efficient way to remove those pixels and only leave larger candidates for the next step.
The basic idea of the binary morphological filter is to sweep an image with a window called the structuring element (SE), which is a pre-defined small geometric window, such as a square or cross. There are two basic operators: erosion and dilation. Other operators, such as opening and closing, are sequential combinations of these two operators. Erosion is good enough to eliminate those small pixel blobs, but it also trims other objects. Opening meets the requirement of eliminating the noise and retaining the information of other objects. The remaining object(s) could be treated as a region of interest that may contain a traffic sign. In this work, different structural elements have been tried, as shown in
Figure 2. Large structure elements may cause the loss of a potential sign; and multiple combinations of erosion and dilation operations improve the results slightly. Therefore, the conclusion was that a single opening operation (erosion and dilation) with a 3 × 3 square structure element provides the best results.
Figure 2.
Experimental results of morphological filters with various combinations of operations and structural elements. Clockwise from top left corner: original image; after erosion and dilation steps using 3 × 3 pixel structural elements; after erosion and dilation steps using 5 × 5 pixel structural elements; after erosion, dilation, dilation and erosion steps using 3 × 3 pixel structural elements.
Figure 2.
Experimental results of morphological filters with various combinations of operations and structural elements. Clockwise from top left corner: original image; after erosion and dilation steps using 3 × 3 pixel structural elements; after erosion and dilation steps using 5 × 5 pixel structural elements; after erosion, dilation, dilation and erosion steps using 3 × 3 pixel structural elements.
2.1.3. Labeling
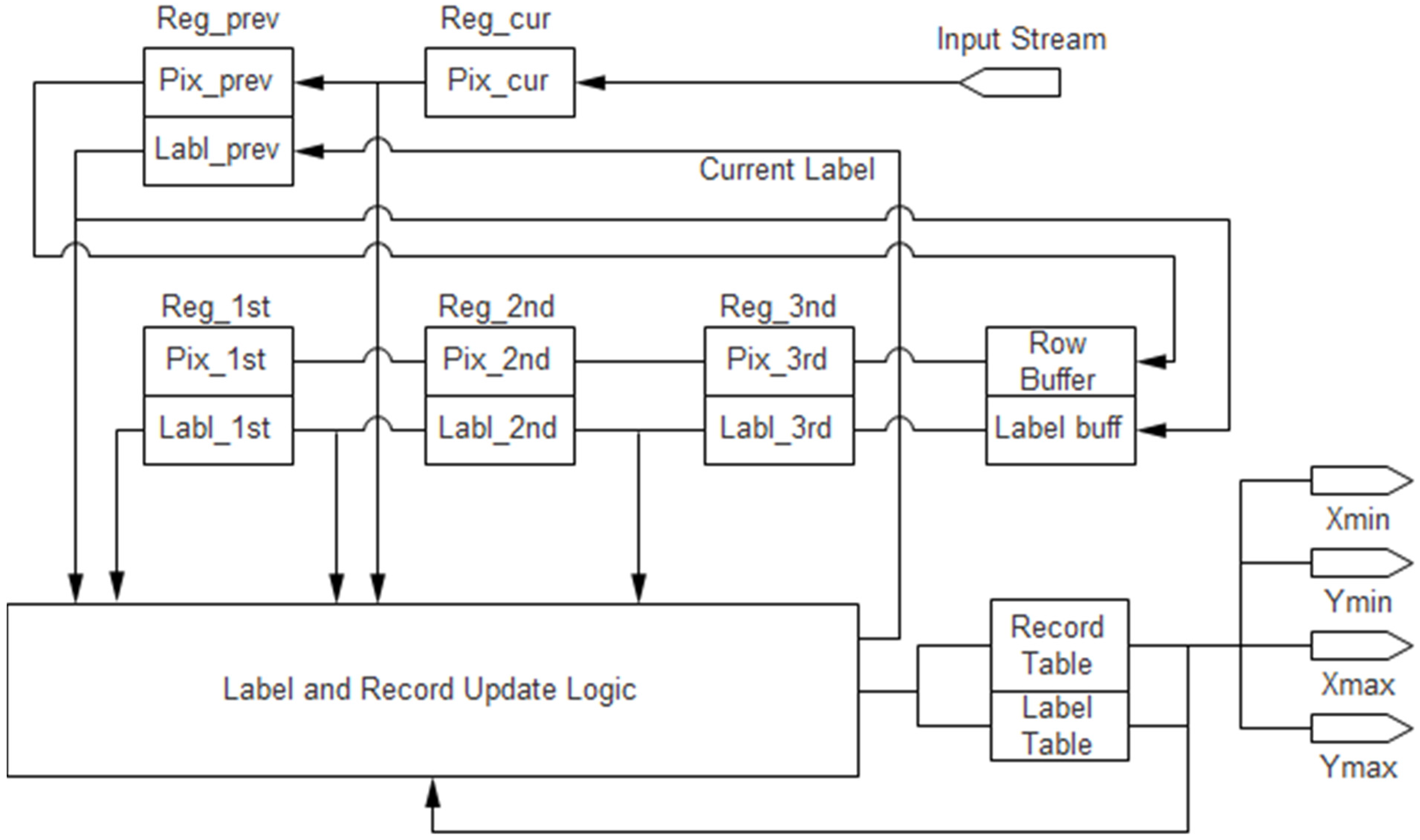
Labeling is the process of scanning the image to detect pixel groupings. Pixels that share an edge or a vertex are considered to be members of the same pixel grouping or “blob”. The remainder of this section details the algorithm used to detect these blobs. The goal with labeling is to identify a bounding box for each and every pixel grouping in the image. This will result in four parameters for every blob: Xmin, Ymin, Xmax, Ymax. These are the two diagonal corners that define the bounding box. Simply put, the labeling algorithm scans the image from bottom to top and left to right (raster order) keeping track of Xmin, Ymin, Xmax and Ymax for all of the pixel groupings it encounters. During this scanning, only one row plus two pixels are stored and labeled at a time in memory. Labels are assigned, and a table is built containing the Xmin, Ymin, Xmax and Ymax values for each label. While scanning, a window of five pixels is examined at a time: the current pixel and its four previously-visited neighbors. The window size is chosen to be five due to the reduced memory usage (only one row plus two pixels). Each pixel initially starts with a label of 0 (not labeled), and if the pixel is a foreground pixel, then a non-zero label is assigned. The value of that label depends on the labels of its four neighbors.
Figure 3 shows all of the possible combinations for consideration when determining the label of the current pixel. Each of these diagrams represents the current pixel, X, its immediate previously-scanned neighbor, P, and its previously-scanned neighbors, 1, 2 and 3. Shaded pixels are active and labeled. There are two special cases distinguished by the red and blue borders. The first special case, marked in red, is the case in which none of the current pixel’s neighbors have a label. In this case, the current pixel receives a new label. The second special case, marked in blue, is the case when the current pixel has multiple neighbors that have labels, and these labels may not be the same. When different labels meet at the current pixel, relabeling must happen, so that a single bounding box is generated to encompass what had been two separate labels. The remaining case is the simplest: the current pixel has one or more previously-labeled neighbors having the same label. In this case, the current pixel is simply labeled in kind.
Figure 3.
Possible pixel configurations for the labeling process. X is the current pixel; P is the immediate previous neighbor; 1, 2 and 3 are previously-scanned neighbors [
5].
Figure 3.
Possible pixel configurations for the labeling process. X is the current pixel; P is the immediate previous neighbor; 1, 2 and 3 are previously-scanned neighbors [
5].
While pixel labels are being assigned, the bounding box for each label is being grown to encompass all of the pixels that contain that label. This is done by maintaining a record table that holds Xmin, Ymin, Xmax and Ymax for each label. The second special case described above is where the interesting portions of this algorithm reside. When two labels meet, the algorithm is discovering for the first time that what was previously thought to be two distinct blobs is indeed one. The records that have been maintained thus far will need to be updated to include this information. One possible approach would be to rescan all or portions of the image. However, given that doubling back to reliable portions of the image can be a time-consuming step, it was chosen to solve this problem by using a level of indirection. Each pixel is given a label. This label does not point to a record of Xmin, Ymin, Xmax and Ymax, but rather, to a record number. This record number points to these actual bounding box parameters. In this way, when two labels meet, both labels can be made to point to the same record that will now encompass what was once two labeled groupings.
Consider the example in
Figure 4. This is a simple 16 × 16 pixel image that contains two blobs that should be labeled by the labeling algorithm. As the algorithm begins, as shown in
Figure 4a, the first three pixels encountered are labeled with new labels, as they have no labeled neighbors that have been encountered yet. The pixels that are marked with red indicate this special case; a new label is used. The record table to the right shows the values it would take at this point in the scan of the image. The next two figures (
Figure 4b,c) show what happens when Labels 1 and 2 meet and when Labels 2 and 3 meet. The yellow box shows the window the algorithm is considering at that point in time. When two labels meet, the label table is updated to point to the lower record entry. This entry is also updated, so that the points it describes encompass all of the pixels of both labels. In this way, information is carried along.
Figure 4d shows the fully-labeled image with its completed record table. It can be seen that temporary label numbers, 1, 2, 3, all point to the same record number and boundary box as expected, since they belong to the same “blob”.
Figure 4.
Labeling example. (a). Three new labels are created; (b) Labels 1 and 2 meet; (c) Labels 2 and 3 meet; (d) completed labeling. Labels 1, 2 and 3 all point to the same record number and boundary box.
Figure 4.
Labeling example. (a). Three new labels are created; (b) Labels 1 and 2 meet; (c) Labels 2 and 3 meet; (d) completed labeling. Labels 1, 2 and 3 all point to the same record number and boundary box.
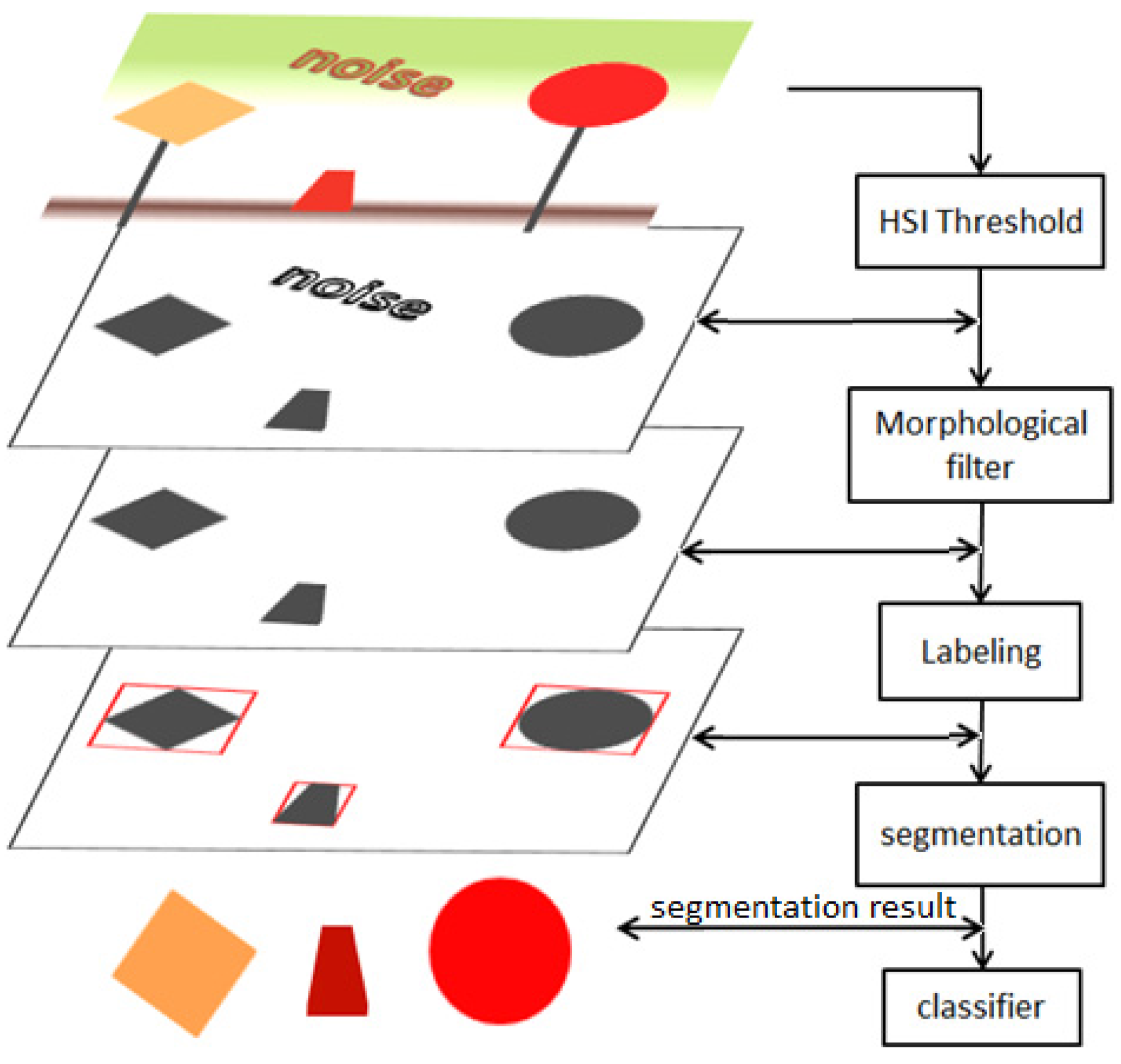
Figure 5.
Detection of potential traffic signs. Steps include RGB to HSI conversion, denoising using morphological functions, labeling (grouping) of potential signs and extraction of potential signs to be forwarded to the sign classifier process.
Figure 5.
Detection of potential traffic signs. Steps include RGB to HSI conversion, denoising using morphological functions, labeling (grouping) of potential signs and extraction of potential signs to be forwarded to the sign classifier process.
2.1.4. Segmentation and Detection of Traffic Sign Candidates
After the labeling step, multiple regions of interest (each label corresponds to an ROI) have been identified and extracted, and they are sent to the sign classification part. This is accomplished by mapping the associated binary image with the original image. The associated binary image is the result of the original image processed by all steps mentioned above. Coordinates provide the location of the ROI, and active binary pixels provide the exact pixels that need to be extracted from the original image.
Figure 5 shows the complete procedure for the detection of traffic sign candidates.
2.2. Sign Classification
After the sign detection step, several regions of interest are obtained that may potentially contain a traffic sign. Next, these potential signs are searched in the traffic sign database in order to find a match. In this work, a sign classification approach based on speeded-up robust features (SURF) [
33] and the nearest neighbor classifier is used. The SURF detector is used to detect and extract features from hundreds of sign templates for training. The nearest neighbor classifier is used in the final step for categorization.
2.2.1. Feature Extraction and SURF Detector
SURF is a robust local feature detector popular in computer vision applications. It is based on the SIFT algorithm and is shown to be faster and more robust against SIFT. It uses the determinant of the Hessian matrix to find interest points. For a continuous function of
x and
y, the value of the function at
is given by
. The Hessian matrix
H of function
at
is:
where
,
and
are second partial derivatives of function
.
The determinant of this matrix is given as:
This determinant is used to estimate whether the function f has extremum at . If the determinant is positive, which means f changes with x and y in the same direction, then point could be a local extremum. If the determinant is negative, which means f changes with and in different directions, then point is not a local extremum.
For image processing, we can just replace the function by a gray image . The second order derivative can be replaced by the Laplacian. Since Laplacian is sensitive to noise, the SURF detector combines the Gaussian filter for smoothing. Then, the second order derivative is replaced by the Laplacian of Gaussians (LoG).
SURF features are scale invariant. To achieve this, scale-space is used to find the extrema across all possible scales. Typically, this is achieved by creating an image pyramid with smaller down-sampled images. For computational efficiency, instead of using an image pyramid, SURF increases the size of the filter to achieve a similar effect. Based on the response of these filters, a scale-space is created. A non-maximal suppression is performed in a 3 × 3 × 3 neighborhood to localize interesting points. The interest point localized by the determinant of the Hessian matrix is compared against its 26 neighbors. If it is greater than its surrounding pixels, it is selected as a maximum. After locating the interest points, descriptors are created using the Harr wavelet response of the surrounding pixels. Each interest point is assigned an orientation. If descriptor components of an interest point are extracted relative to this orientation, it will be invariant to image rotation. In order to determine the orientation, Haar wavelet responses in the x and y direction are calculated for a set of sampled points within a radius of 6σ at the detected interest point, where σ refers to the scale at which the interest point was detected.
2.2.2. Dataset, Feature Selection and Training
The SURF detector is used to find a reliable extractor that could provide robust features to the traffic sign database for machine learning. One problem for feature extraction is the difficulty of finding a suitable database that contains enough examples of U.S. traffic signs sampled from a natural environment. Collecting examples from different sources is not desirable, since various brands of camera plus various image formats will make the database unreliable for testing and training. Therefore, we created a sign database by taking hundreds of signs with different rotation and scale values. The numbers of signs with different color categories are listed in
Table 2. Some example images are shown in
Figure 6.
Figure 6.
Example images from the traffic sign dataset.
Figure 6.
Example images from the traffic sign dataset.
Table 2.
Distribution of primary colors in the sign dataset.
Table 2.
Distribution of primary colors in the sign dataset.
| Sign Color | Number of Signs |
|---|
| red | 8 |
| yellow | 13 |
| white | 12 |
Figure 7 shows an example traffic sign, “BUMP”, with detected interest points. It can be seen that some of the interest points are detected at the edge. In fact, there are as many interest points at the edge as the interest points detected around the center. Center interest points usually contain more valuable (distinguishing) information. Most signs in our database contain edges that contribute a large number of redundant interest points to our database. Furthermore, using this database for training leads to undesirable outcomes. To avoid the disturbance of those interest points around edges and to reduce the number of interest points, we propose two feature selection methods for database creation. One method is to setup a threshold of the determinant of the Hessian matrix at the interest point detection step. Recall the determinant function, where
and
are second derivatives of function
f in the
x and
y direction, respectively. Both
and
will have larger values, if point(
x,
y) is of the corner. If the point (
x,
y) is of the edge, then either
or
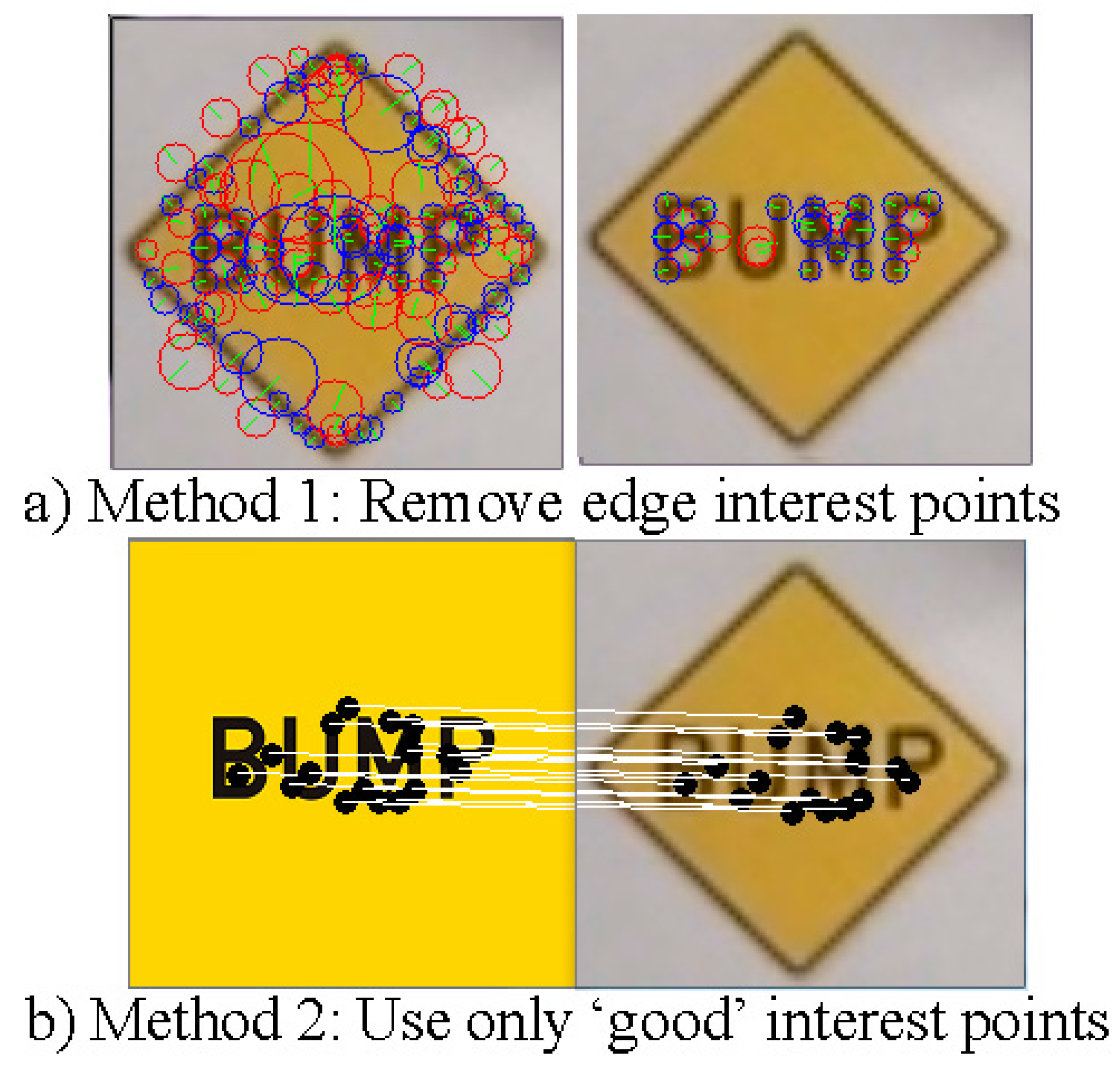
would like to have a larger value. Hence, the determinant of the points around the corner is larger than the determinant of the points around the edge. Based on the experimental results, a threshold value is selected. The interest points detected after thresholding (interest points at the edges are ignored) are shown in
Figure 8a.
Another method is to cut off the edges from training images and then extract only “good” matches from the remainder image (see
Figure 8b). For each interest point of the query image, we calculate its distance with every interest point in the template image and find the minimum distance and second minimum distance. Generally, a good match has both a smaller absolute distance and smaller relative distance. Hence, a determinant of a good match is given by:
where
is the minimum distance,
is the second minimum distance,
is the relative threshold and
is the absolute threshold. This equation was validated by experimental results. To balance the number of interest points of each sign,
and
can be adjusted during the extraction processing.
Figure 7.
Detected interesting points (features) on a traffic sign image for “BUMP”.
Figure 7.
Detected interesting points (features) on a traffic sign image for “BUMP”.
Figure 8.
Proposed interest point reduction methods for database creation. (a) Method 1: removal of interest points around the edge; (b) Method 2: select only “good” interest point matches.
Figure 8.
Proposed interest point reduction methods for database creation. (a) Method 1: removal of interest points around the edge; (b) Method 2: select only “good” interest point matches.
The similarity measure between two interest point p and q is based on Euclidean distance, which is given by:
Figure 9 shows the flowchart of the feature database creation. For Method 1, interest point matching is not required. The determinant threshold, which can eliminate edge points, needs to be set before executing the program. The program is designed to build only one type of traffic sign at a time. Once the program starts, a single training image will be loaded, then features will be extracted and stored. The program will extract features iteratively until all images (belonging to one traffic sign) are done. The final step will be combining these features extracted from different images together and storing in a single file “database”.
As described earlier, Method 2 uses only features from training images that have “good” matches on the template image. Hence, an extra matching step is inserted to create the database for Method 2, as shown in
Figure 9b. Since features of a single image have been extracted in the previous process, the program starts from read features form “sign_name_i ipts” files. The standard template will be treated as the target sign, and features from other training images will try to find their match on this template sign. The iteration will keep executing until all images are done. The final step is to store all matched features in a single file. For both programs, the final database contains features extracted from 33 different types of traffic signs (set from Illinois, USA).
Figure 9.
Flowchart for database creation. Repeat the steps for each traffic sign. Training can be done with any number of test images. (a) Method 1 uses the determinant threshold to eliminate edge interest points; (b) Method 2 determines the “good” matches to a template image and only uses those interest points as features.
Figure 9.
Flowchart for database creation. Repeat the steps for each traffic sign. Training can be done with any number of test images. (a) Method 1 uses the determinant threshold to eliminate edge interest points; (b) Method 2 determines the “good” matches to a template image and only uses those interest points as features.
2.2.3. k-NN Classification
In pattern recognition applications, the
k-nearest neighbor is a non-parametric method used for classification and regression. In
k-NN classification, the output is a class membership. An object is classified by a majority vote of its neighbors, with the object being assigned to the class most common among its
k-nearest neighbors, If
k = 1, then the object is simply assigned to the class of that single nearest neighbor. It has been proven that the risk of 1-NN is never more than twice the value of the Bayes risk [
34].
The training examples are vectors in a multidimensional feature space, each with a class label. The training phase of the algorithm consists of only storing the feature vectors and assigning labels of the training samples. In the classification phase, k is a user-defined constant, and a query is classified by assigning the label that is most frequent among the k training samples nearest to that query point.
The easiest way of searching the nearest samples is exhaustive search or brute force search. In this algorithm, each query point is compared to all training points in the database. Searching the closest matches to high-dimensional vectors in a large database will lead to a computationally-expensive problem. Instead of using exhaustive search, our database is transferred into a
k-means tree structure. Once the tree is constructed, the searching problem becomes tracing a branch to find a leaf and comparing with every points inside the leaf to find the nearest points. Again, the Euclidean distances are calculated for the similarity measure. If the distance is smaller than the threshold, it will be considered as a good match. The sign that contains the highest number of good matches will be treated as a potential positive detection. If this number is greater than the threshold and it occupies 30% of the total number of good matches, it will be considered as a positive detection, and the traffic sign is identified. The 30% threshold is to avoid those noises that may have broad matches among different signs.
Figure 10 shows the sign classification flow with the database creation described above.
Figure 10.
Sign classification based on SURF and nearest neighbor search.
Figure 10.
Sign classification based on SURF and nearest neighbor search.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















