
Inspection of Metal and Concrete Specimens Using Imaging System with Laser Displacement Sensor †




Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
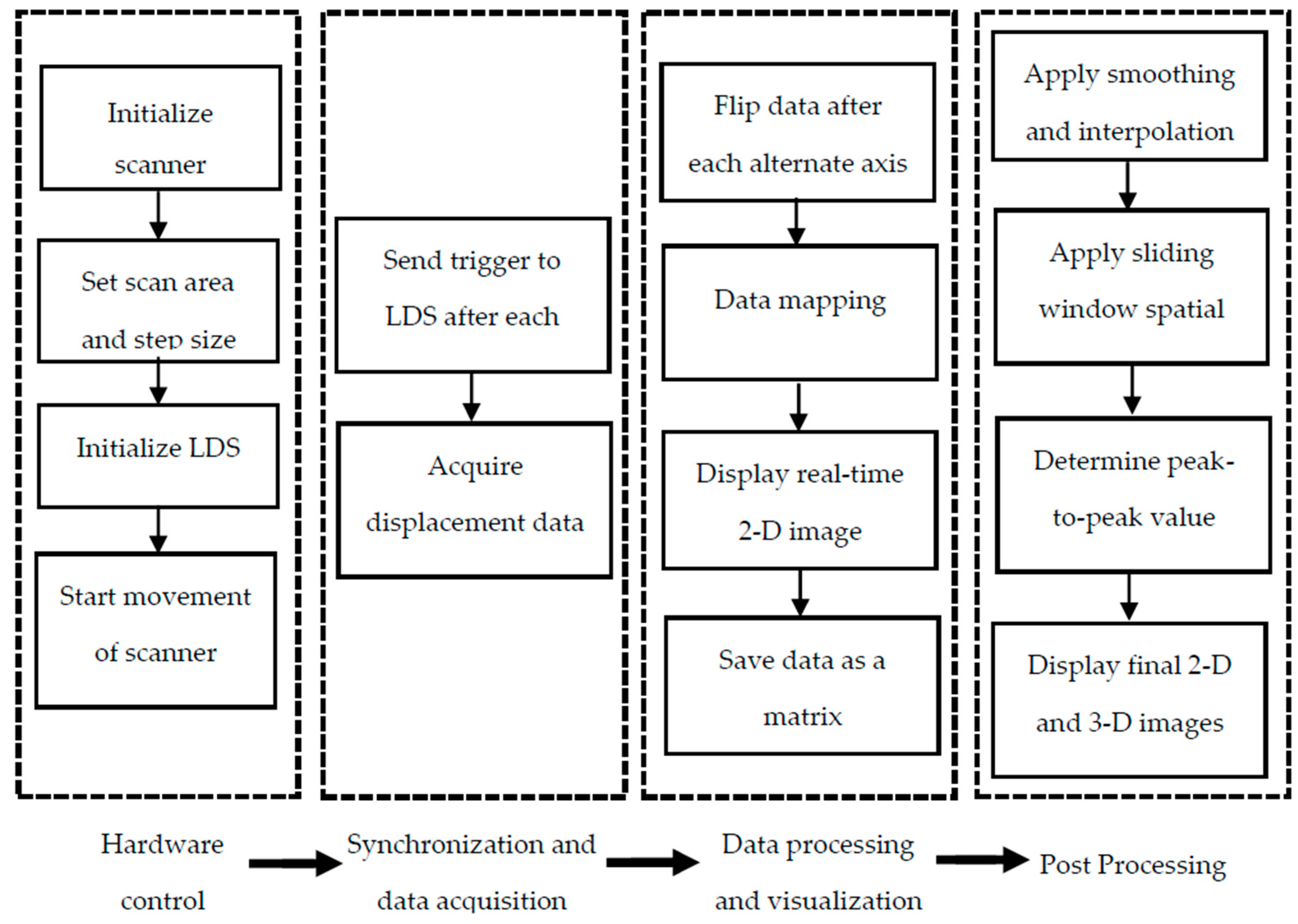
2. Measurement Approach and Materials
2.1. Equipment and Materials
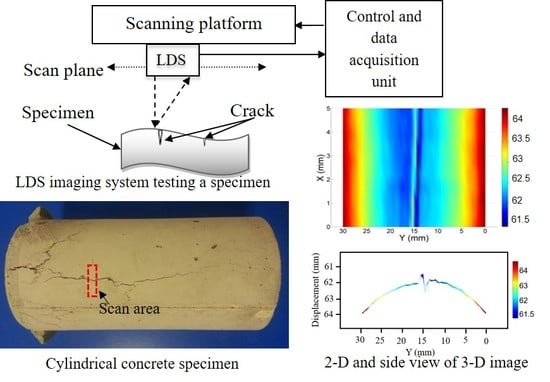
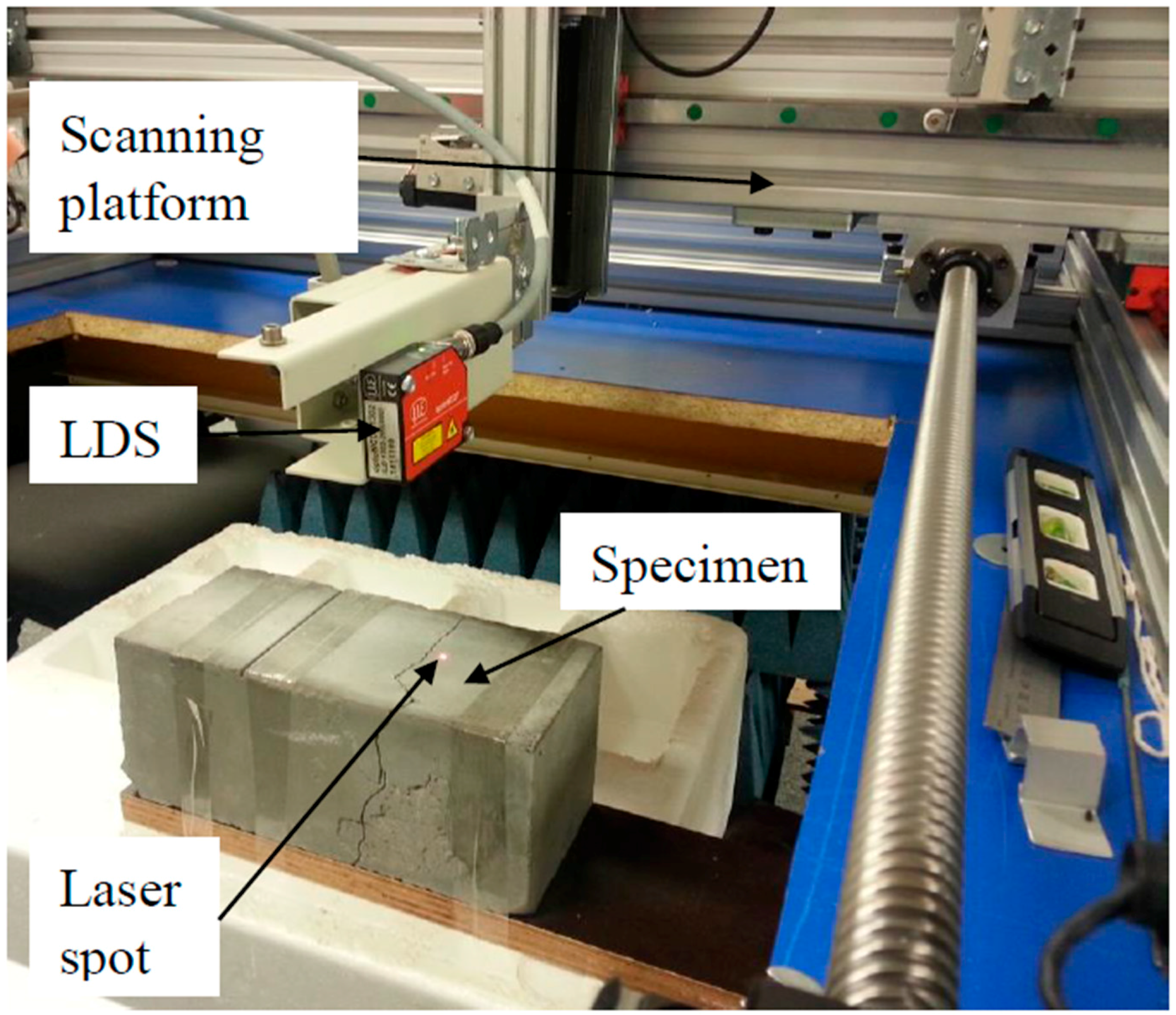
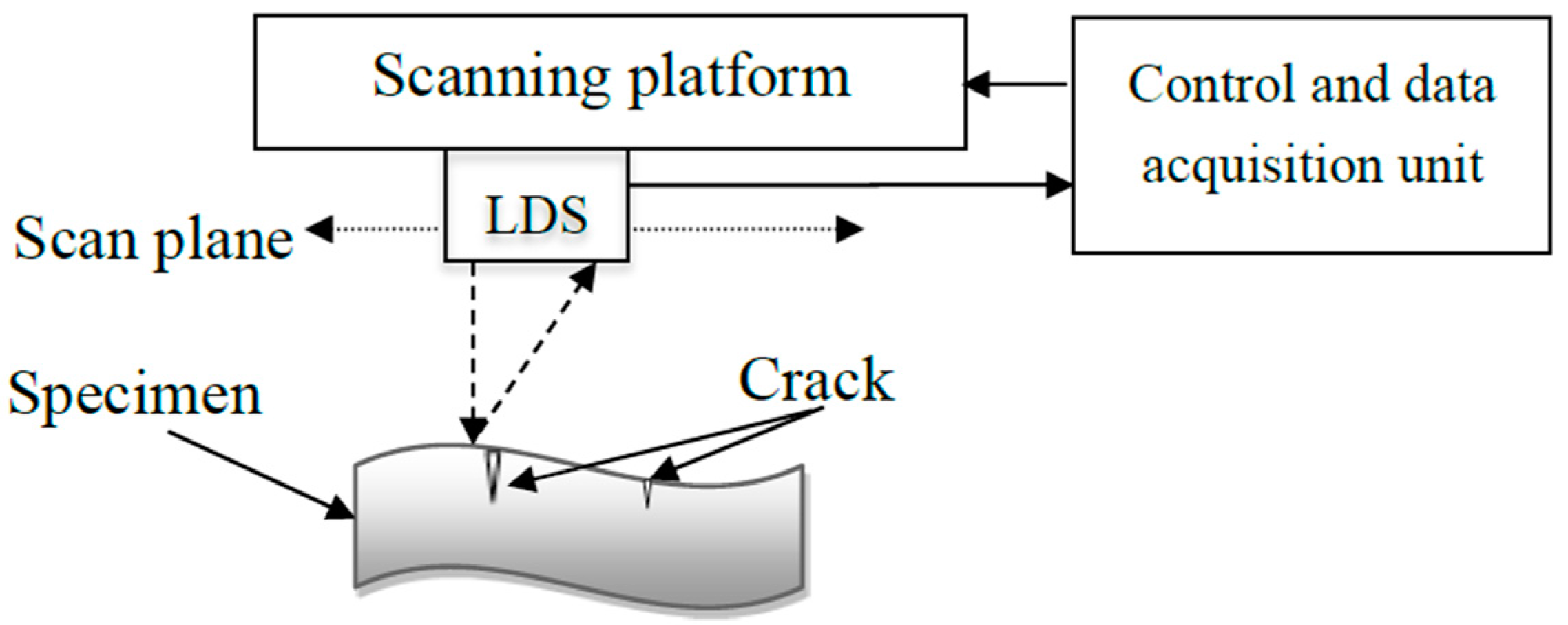
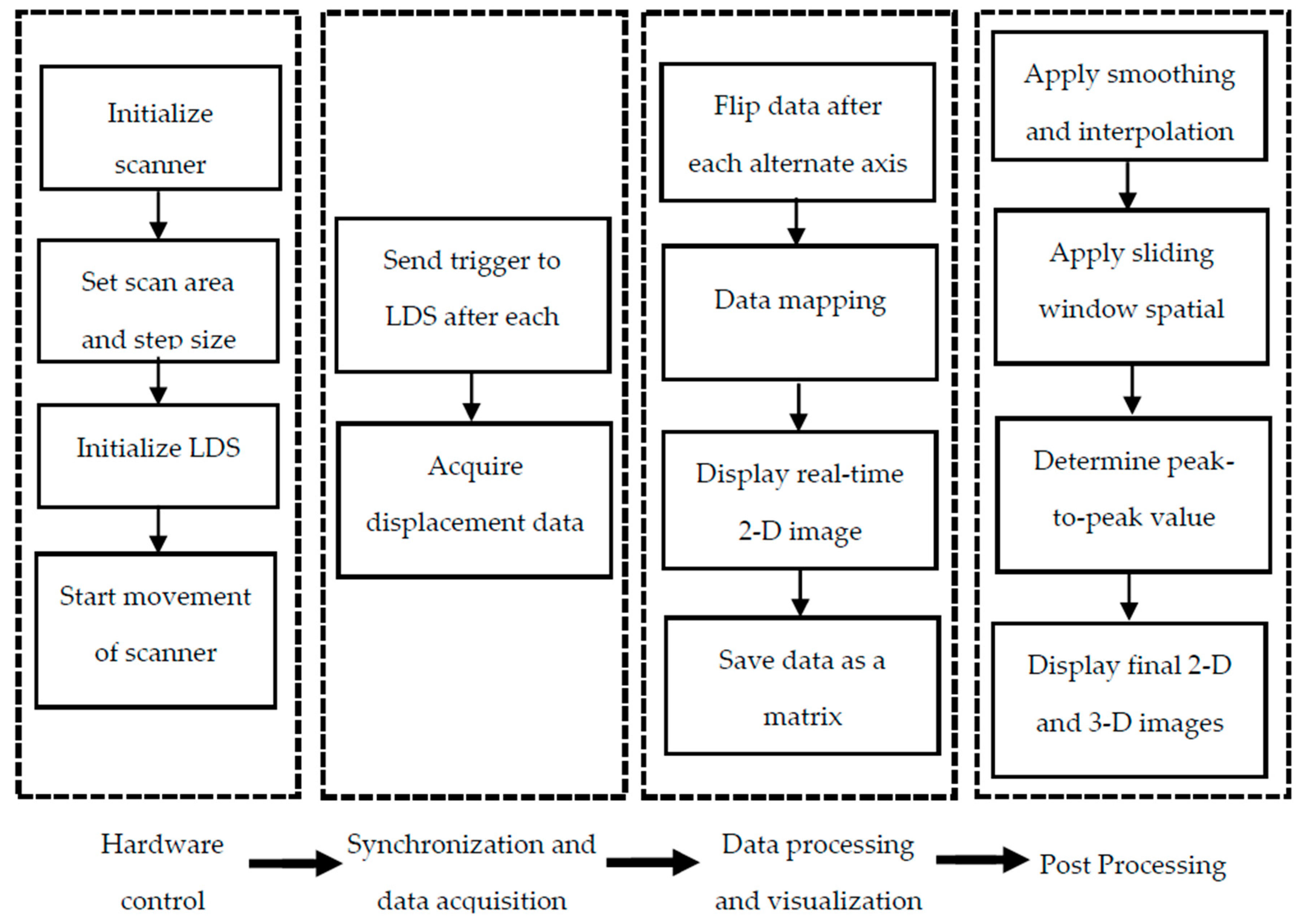
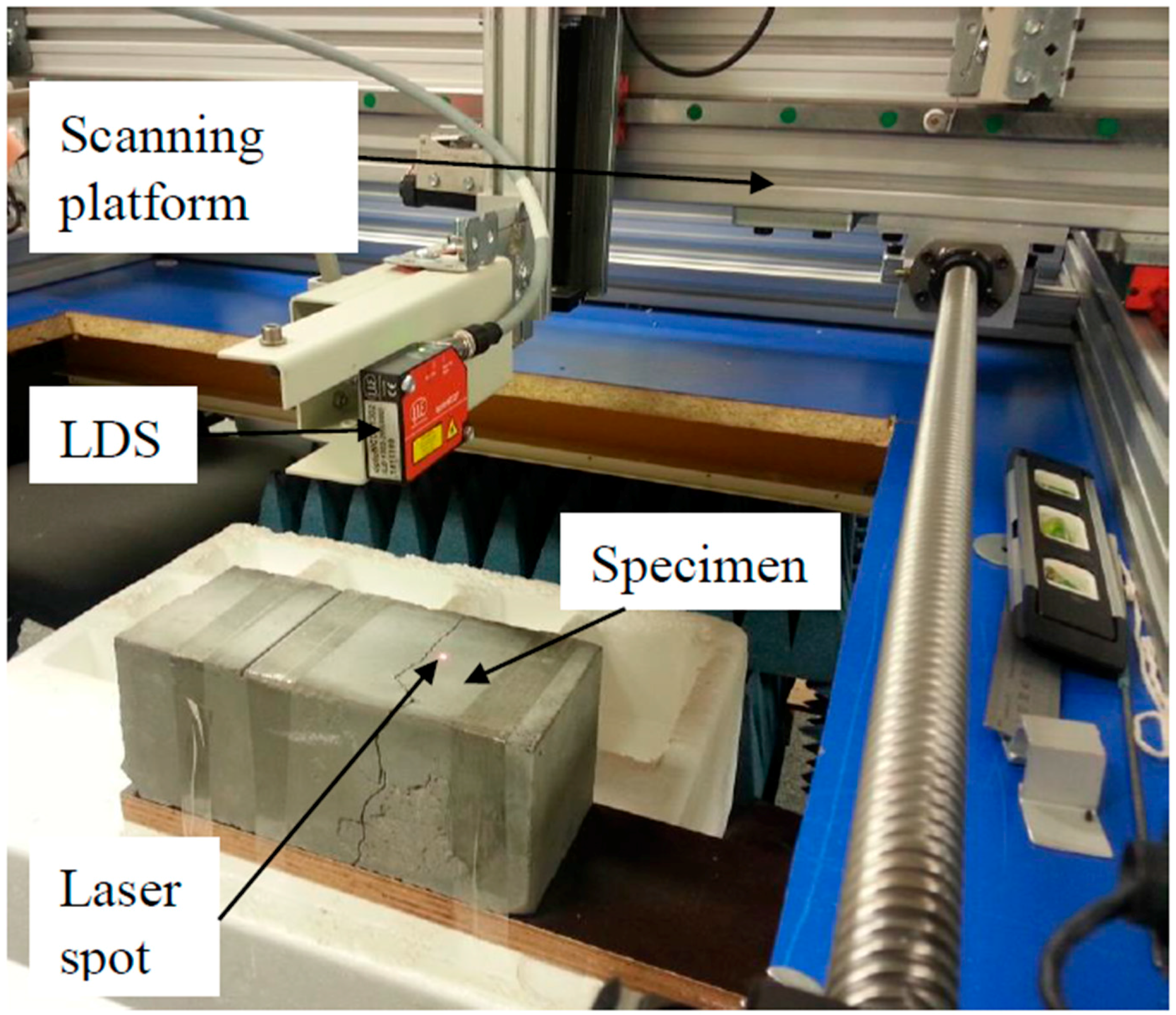
2.2. Experimental Setup
3. Results and Discussion
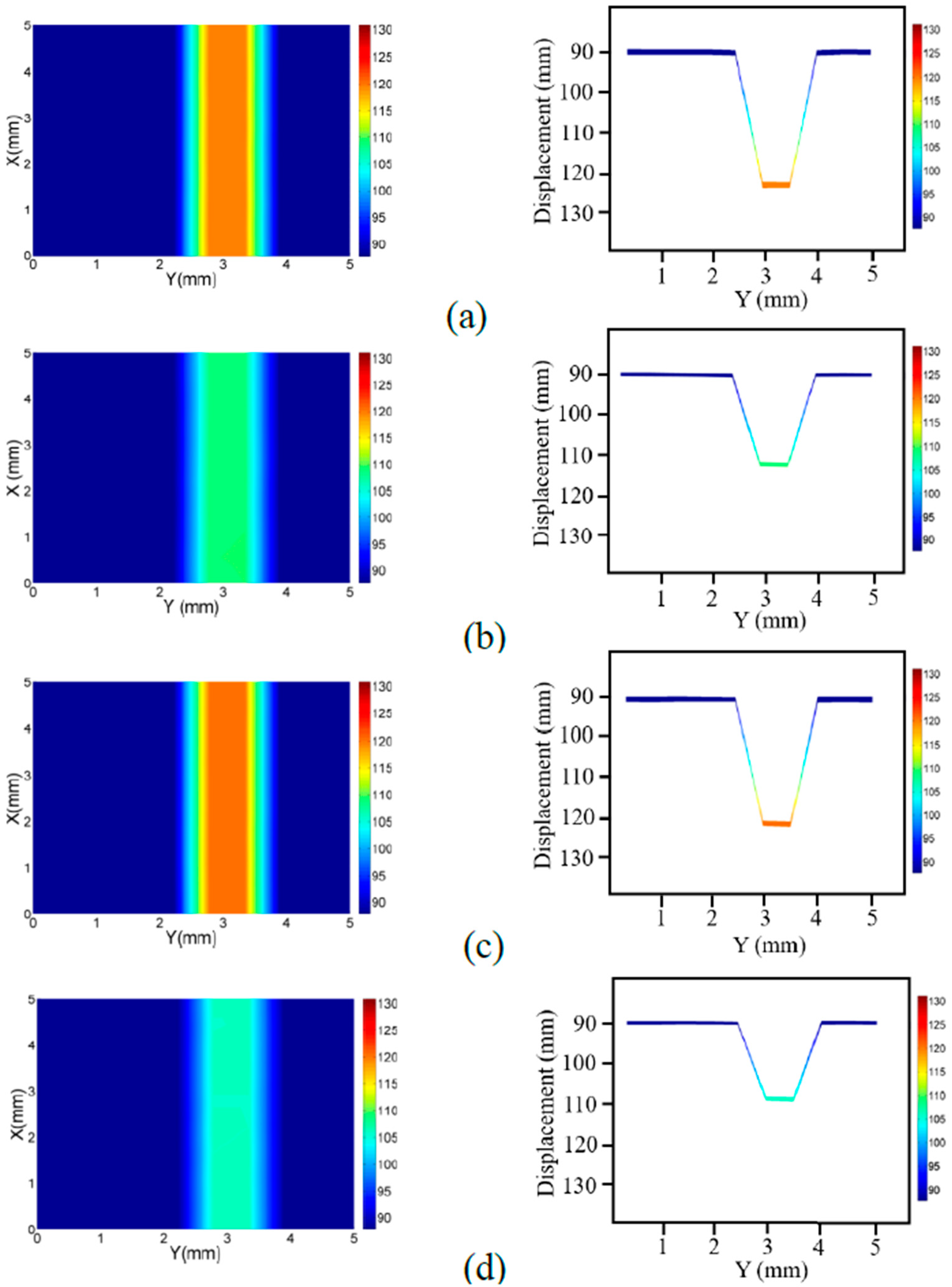
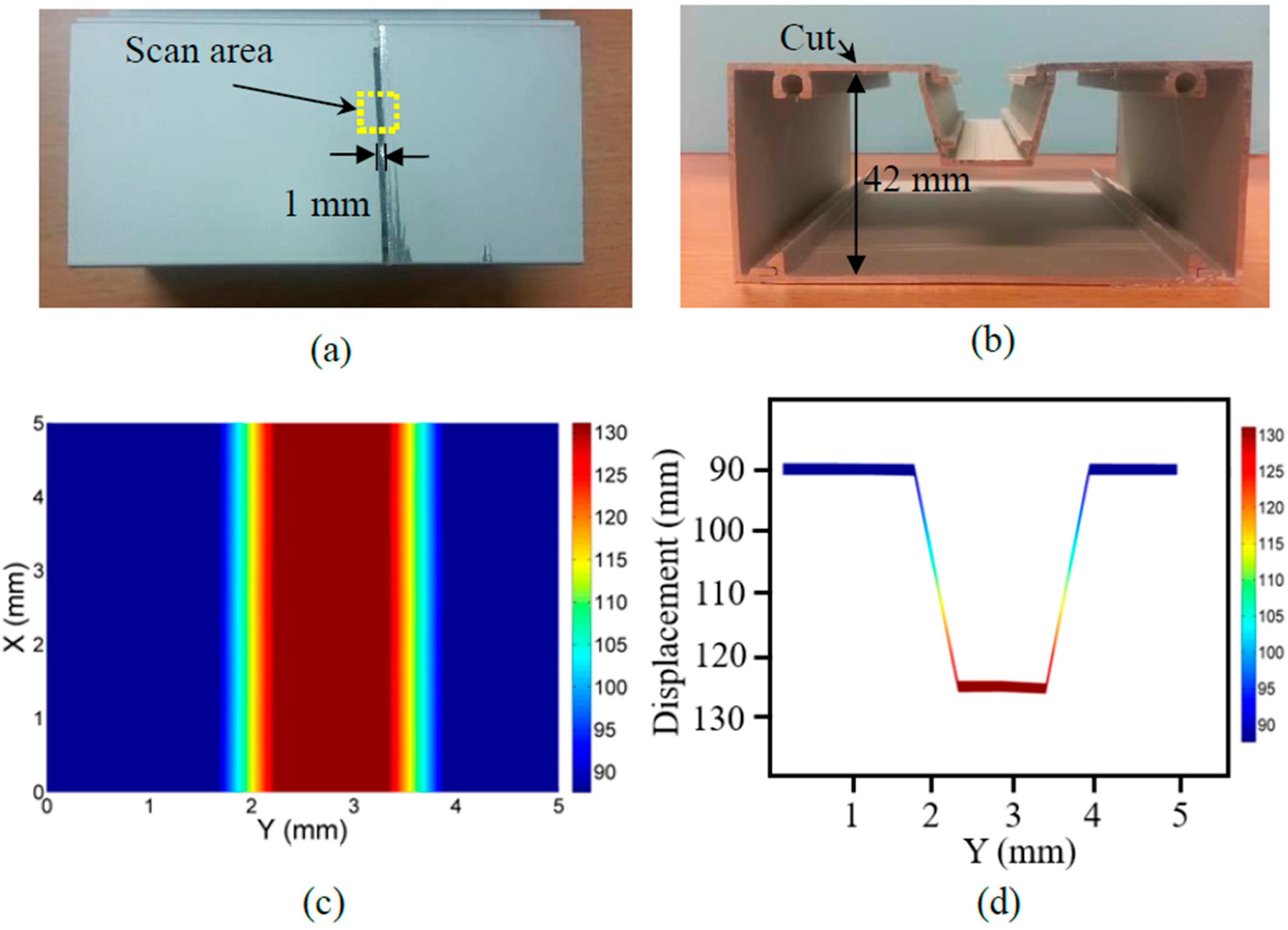
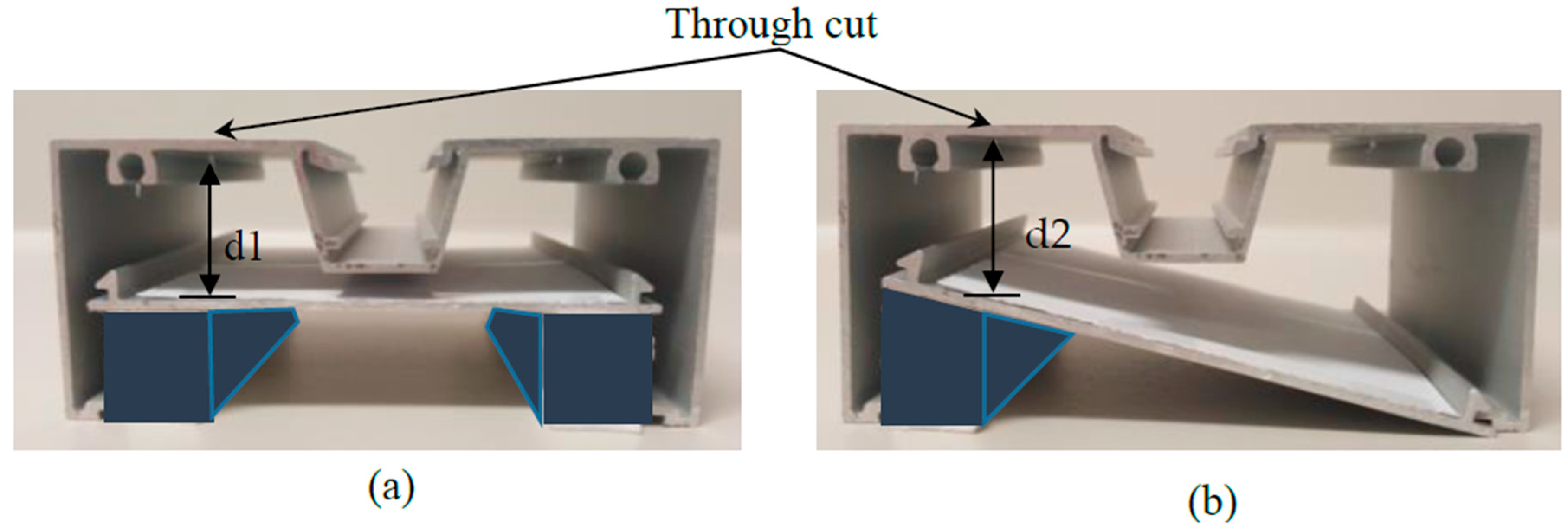
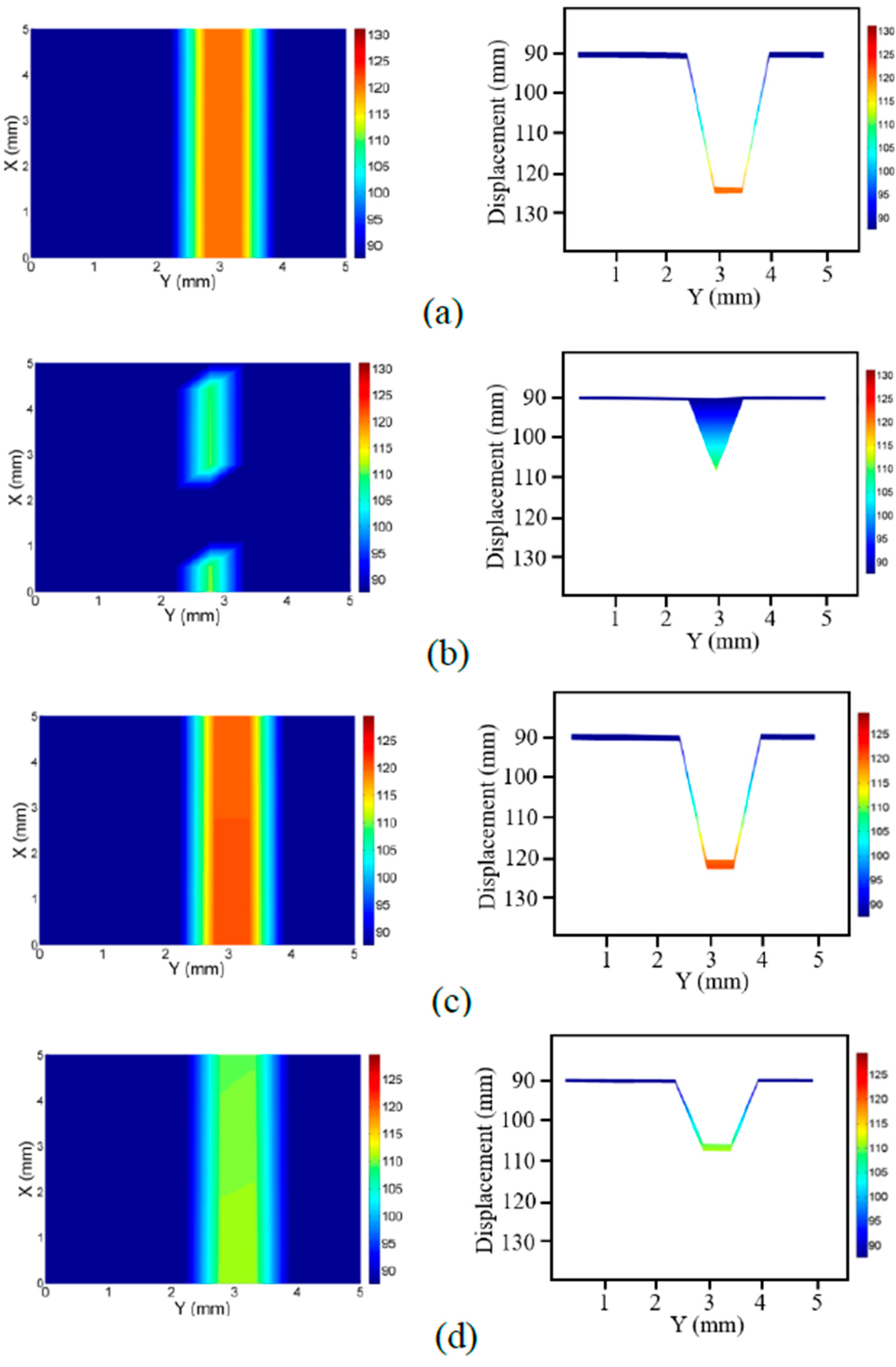
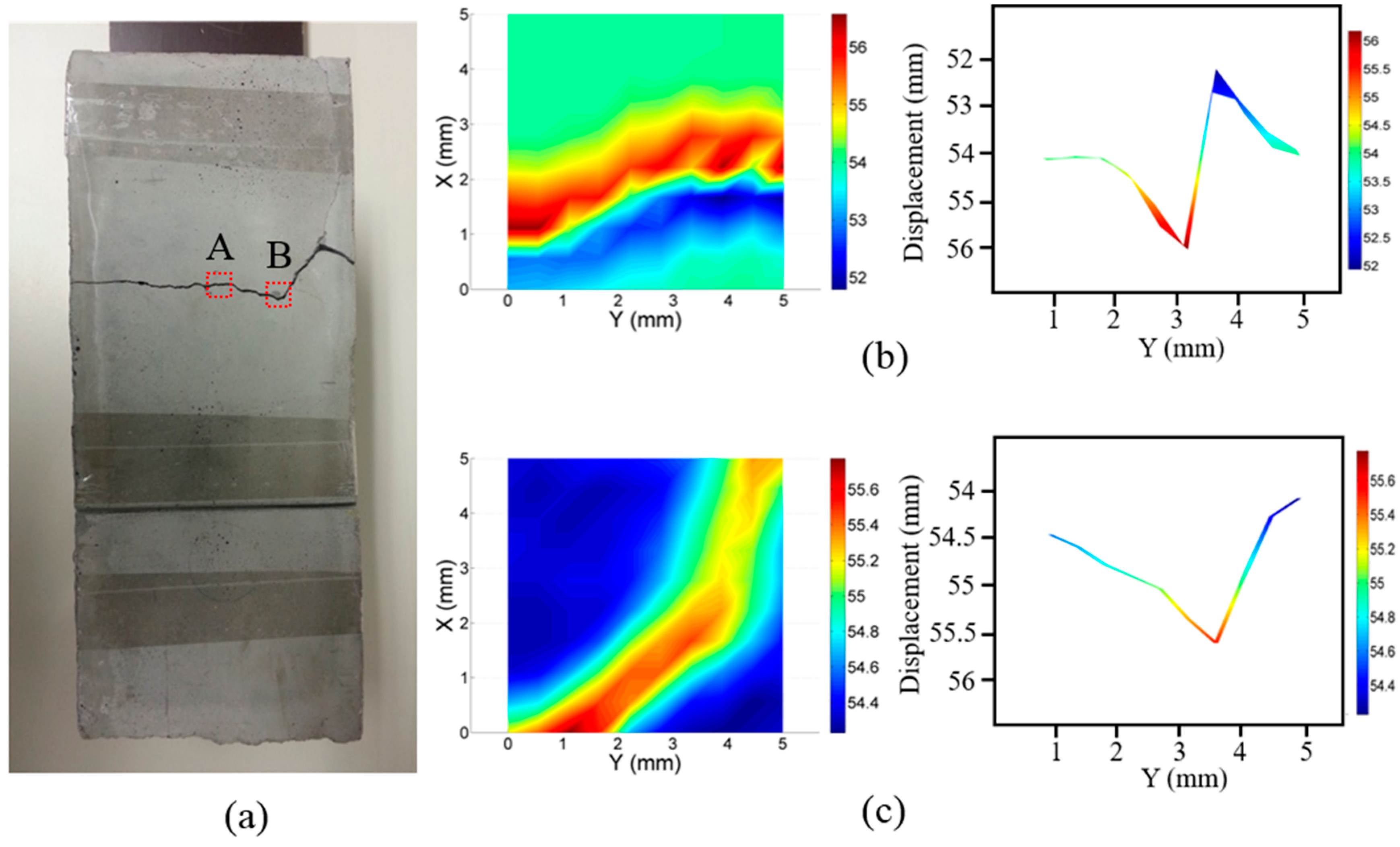
3.1. Imaging of Metal Profile with Through Cut
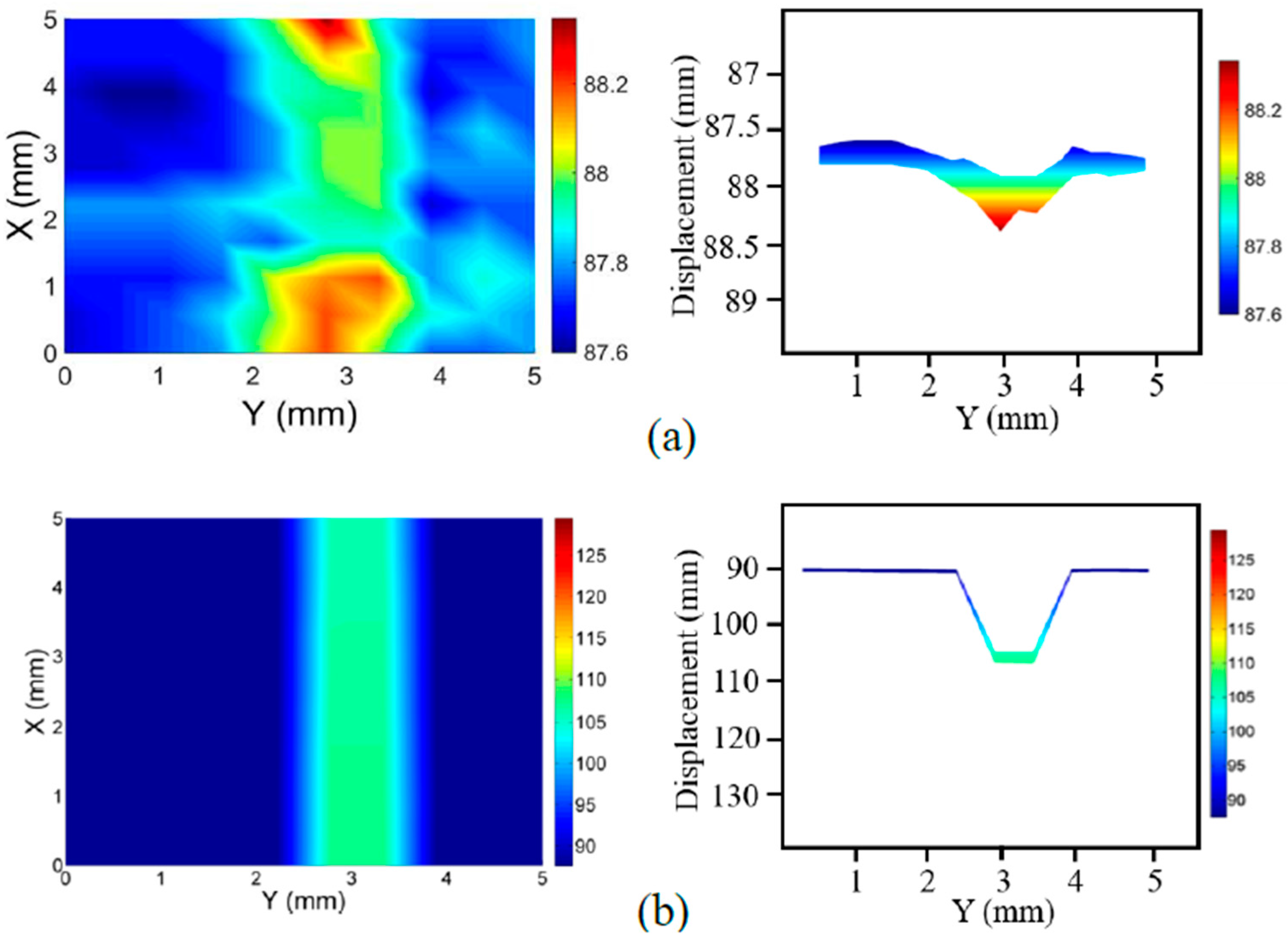
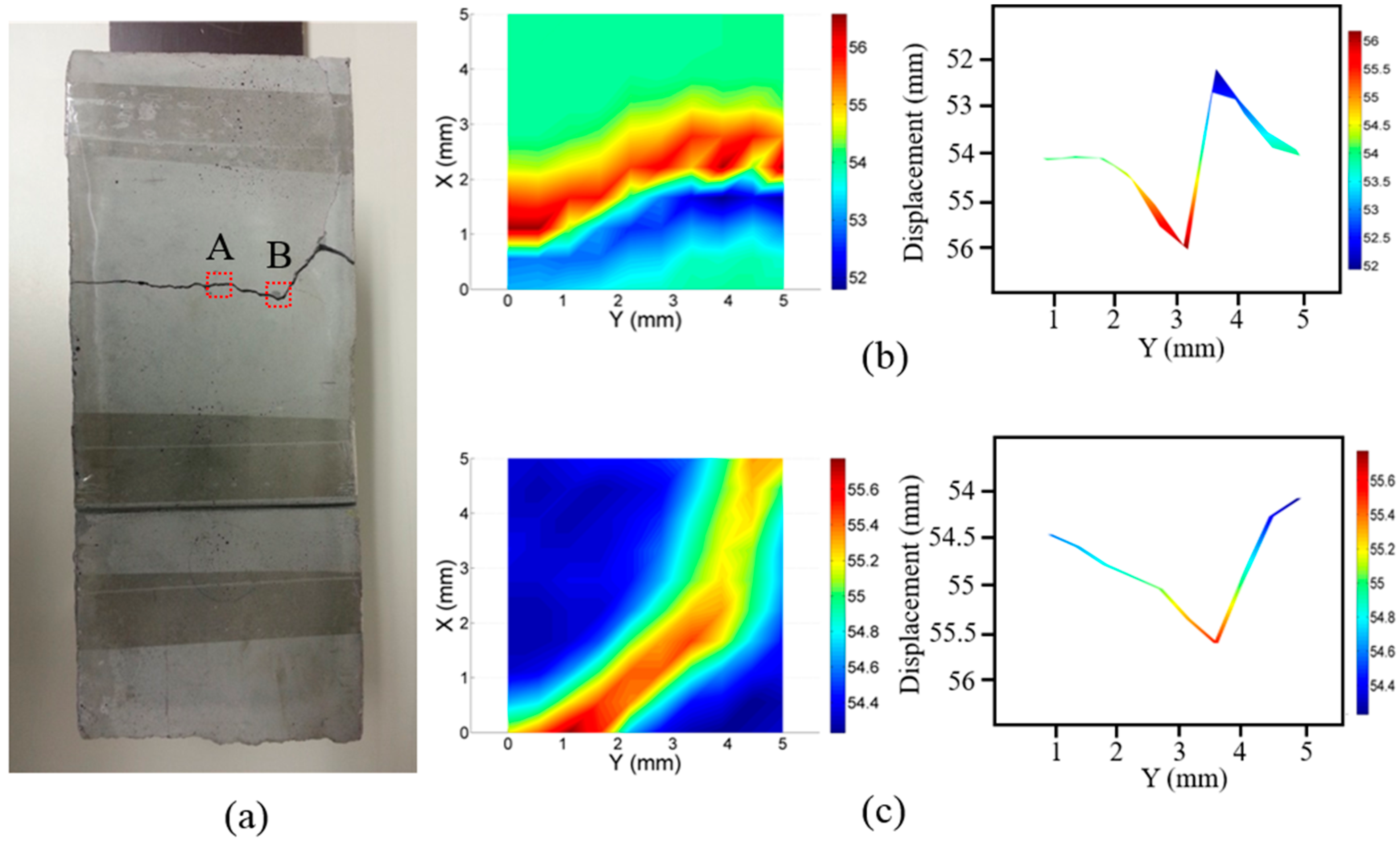
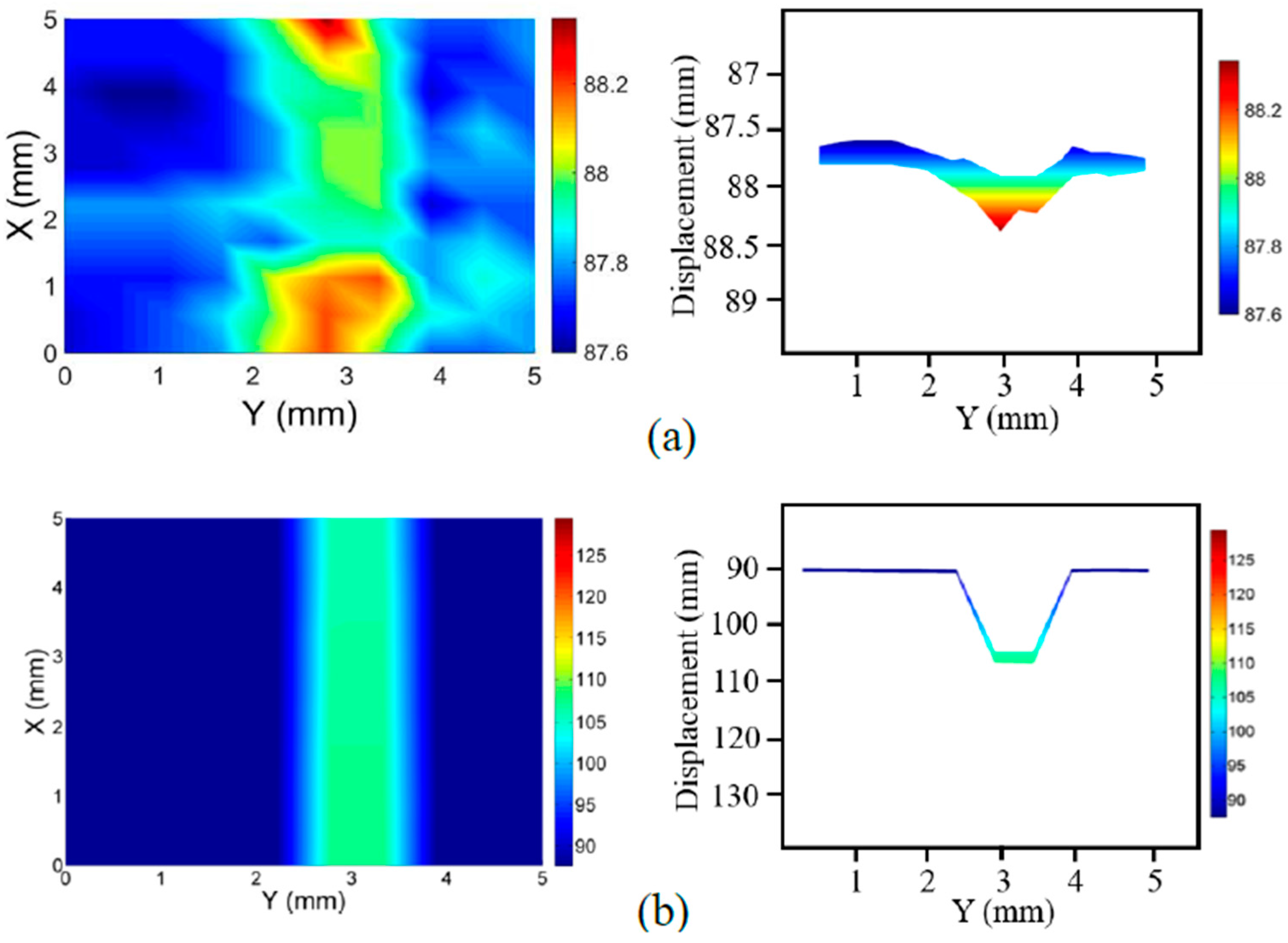
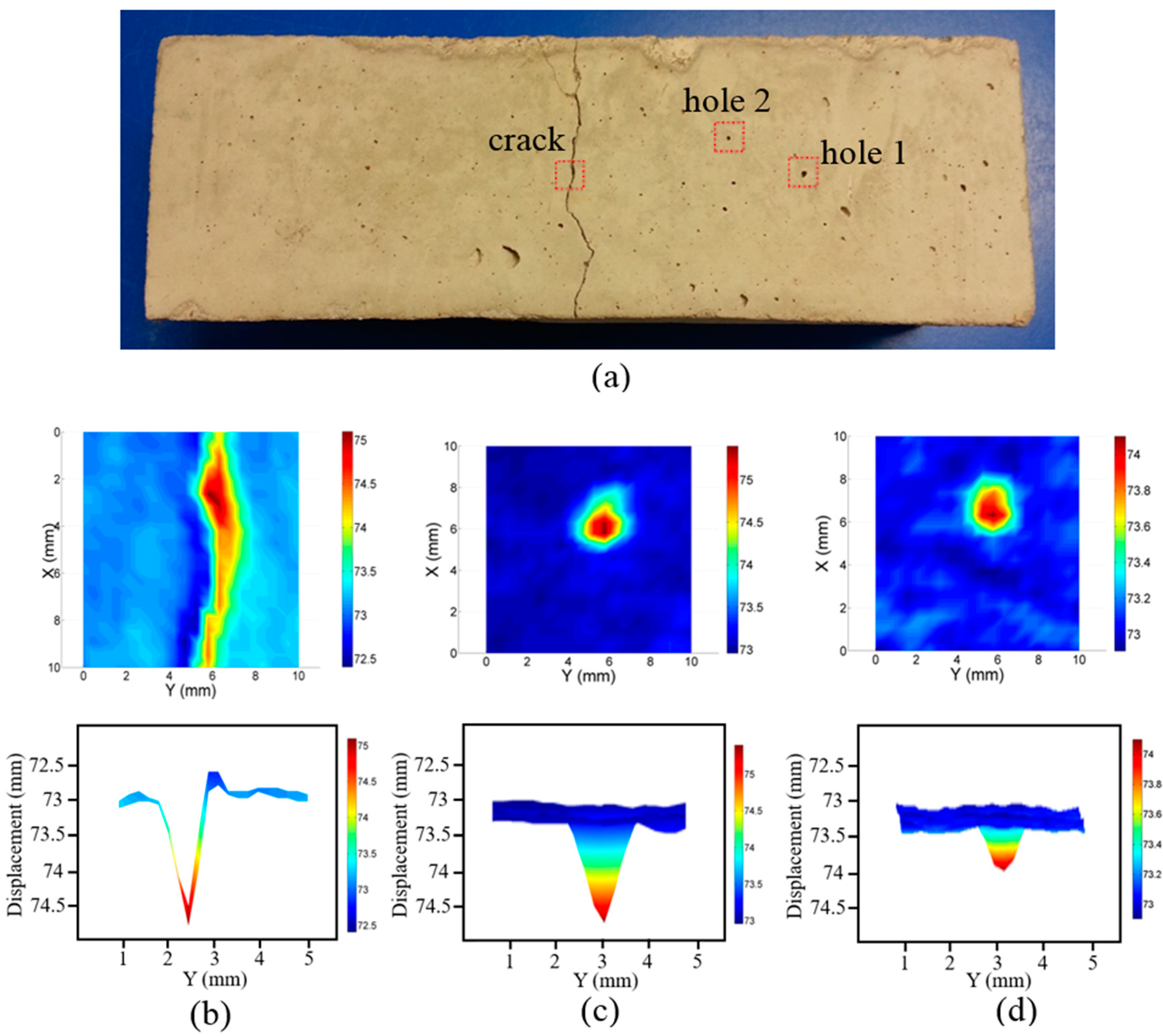
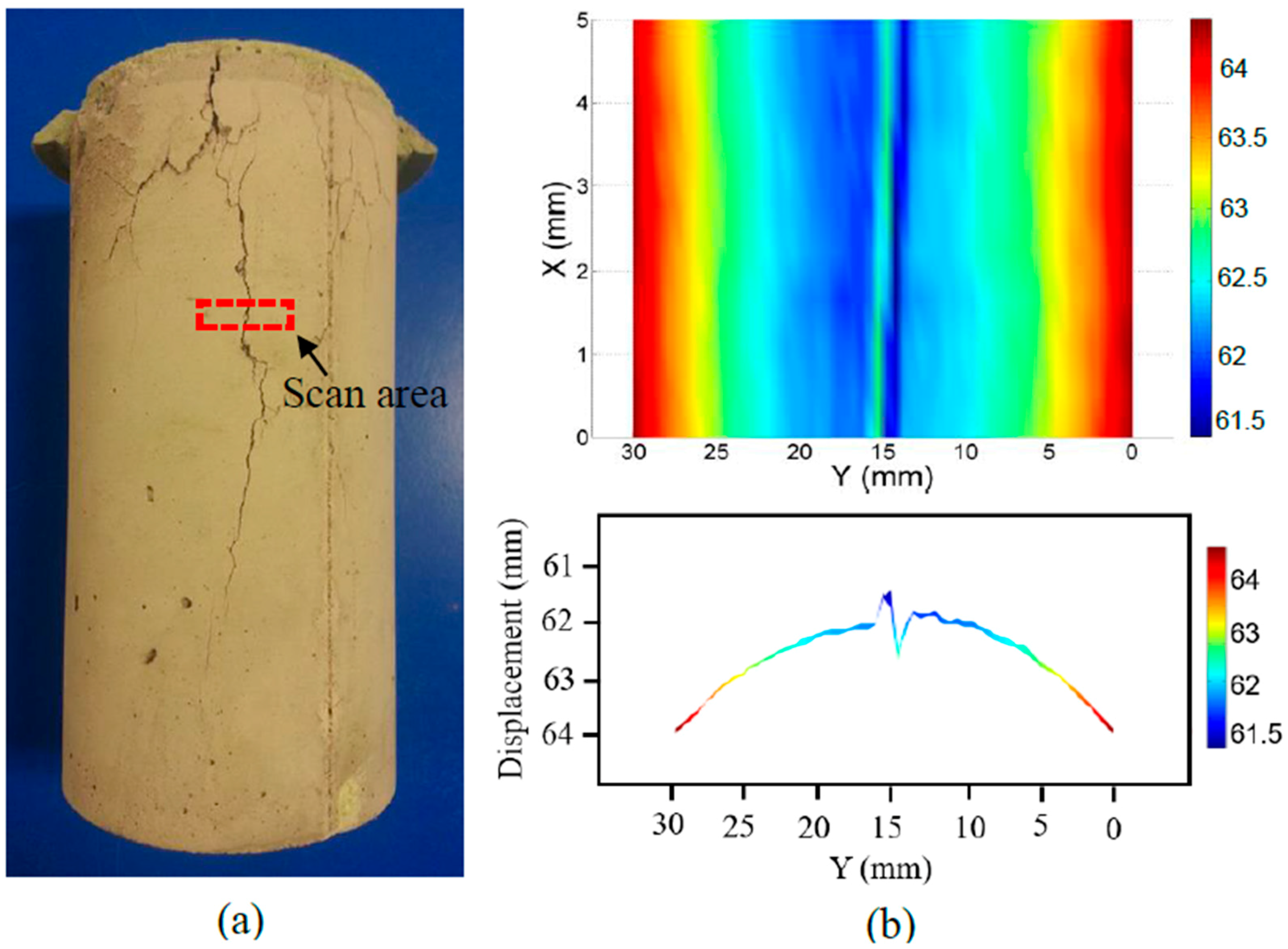
3.2. Surface Flaw Detection in Cement-Based Specimens
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Brownjohn, J.M. Structural health monitoring of civil infrastructure. Philos. Trans. R. Soc. London Ser. A 2007, 365, 589–622. [Google Scholar] [CrossRef] [PubMed]
- Chang, P.C.; Flatau, A.; Liu, S.C. Review paper: Health monitoring of civil infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar] [CrossRef]
- Karbhari, V.M.; Zhao, L. Use of composites for 21st century civil infrastructure. Comput. Methods Appl. Mech. Eng. 2000, 185, 433–454. [Google Scholar] [CrossRef]
- Gambhir, M.L. Concrete Technology: Theory and Practice, 5th ed.; Tata McGraw-Hill Education: New Delhi, India, 2013. [Google Scholar]
- Thompson, M. Blowholes in concrete surfaces. Concrete (London) 1969, 3, 64–66. [Google Scholar]
- Yamaguchi, T.; Hashimoto, S. Fast crack detection method for large-size concrete surface images using percolation-based image processing. Mach. Vision Appl. 2010, 21, 797–809. [Google Scholar] [CrossRef]
- Park, S.; Ahmad, S.; Yun, C.-B.; Roh, Y. Multiple crack detection of concrete structures using impedance-based structural health monitoring techniques. Exp. Mech. 2006, 46, 609–618. [Google Scholar] [CrossRef]
- Fujita, Y.; Hamamoto, Y. A robust method for automatically detecting cracks on noisy concrete surfaces. In Next-Generation Applied Intelligence; Springer: Berlin, Germany, 2009; pp. 76–85. [Google Scholar]
- Kharkovsky, S.; Ghasr, M.T.; Zoughi, R. Near-field millimeter-wave imaging of exposed and covered fatigue cracks. IEEE Trans. Instrum. Meas. 2009, 58, 2367–2370. [Google Scholar] [CrossRef]
- Zoughi, R.; Kharkovsky, S. Microwave and millimetre wave sensors for crack detection. Fatigue Fract. Eng. Mater. Struct. 2008, 31, 695–713. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Zoughi, R. Microwave and millimeter wave nondestructive testing and evaluation-Overview and recent advances. IEEE Instrum. Meas. Mag. 2007, 10, 26–38. [Google Scholar] [CrossRef]
- Nadakuduti, J.; Chen, G.; Zoughi, R. Semiempirical electromagnetic modeling of crack detection and sizing in cement-based materials using near-field microwave methods. IEEE Trans. Instrum. Meas. 2006, 55, 588–597. [Google Scholar] [CrossRef]
- Dhital, D.; Lee, J. A fully non-contact ultrasonic propagation imaging system for closed surface crack evaluation. Exp. Mech. 2012, 52, 1111–1122. [Google Scholar] [CrossRef]
- Lee, F.W.; Chai, H.K.; Lim, K.S. Assessment of reinforced concrete surface breaking crack using rayleigh wave measurement. Sensors 2016, 16, 337. [Google Scholar] [CrossRef] [PubMed]
- Mori, K.; Spagnoli, A.; Murakami, Y.; Kondo, G.; Torigoe, I. A new non-contacting non-destructive testing method for defect detection in concrete. NDT E Int. 2002, 35, 399–406. [Google Scholar] [CrossRef]
- Nassif, H.H.; Gindy, M.; Davis, J. Comparison of laser Doppler vibrometer with contact sensors for monitoring bridge deflection and vibration. NDT E Int. 2005, 38, 213–218. [Google Scholar] [CrossRef]
- Olsen, M.J.; Kuester, F.; Chang, B.J.; Hutchinson, T.C. Terrestrial laser scanning-based structural damage assessment. J. Comput. Civ. Eng. 2009, 24, 264–272. [Google Scholar] [CrossRef]
- Cheng, Y.-J.; Qiu, W.; Lei, J. Automatic extraction of tunnel lining cross-sections from terrestrial laser scanning point clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef] [PubMed]
- Laefer, D.F.; Truong-Hong, L.; Carr, H.; Singh, M. Crack detection limits in unit based masonry with terrestrial laser scanning. NDT E Int. 2014, 62, 66–76. [Google Scholar] [CrossRef]
- Riveiro, B.; Morer, P.; Arias, P.; De Arteaga, I. Terrestrial laser scanning and limit analysis of masonry arch bridges. Constr. Build. Mater. 2011, 25, 1726–1735. [Google Scholar] [CrossRef]
- Giri, P.; Lee, J.-R. Development of wireless laser blade deflection monitoring system for mobile wind turbine management host. J. Intell. Mater. Syst. Struct. 2013, 25, 1384–1397. [Google Scholar] [CrossRef]
- Giri, P.; Kharkovsky, S. Detection of surface crack in concrete using measurement technique with laser displacement sensor. IEEE Trans. Instrum. Meas. 2016, 65, 1951–1953. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Giri, P.; Samali, B. Non-contact inspection of construction materials using 3-axis multifunctional imaging system with microwave and laser sensing techniques. IEEE Instrum. Meas. Mag. 2016, 19, 6–12. [Google Scholar] [CrossRef]
- Giri, P.; Kharkovsky, S. Detection of flaws on surface of civil infrastructures and their profiling using imaging system with laser displacement sensor. In Proceedings of the SPIE 9803, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2016, Las Vegas, NV, USA, 20 March 2016; p. 98034R. [Google Scholar]
- MICRO-EPSILON Instruction Manual OptoNCDT 1302. Available online: http://www.micro-epsilon.com/download/manuals/man--optoNCDT-1302--en.pdf (accessed on 21 December 2016).
- LabVIEW™ 2015 [Computer Software], National Instruments Australia, Macquarie Park, NSW, Australia. Available online: http://www.ni.com/labview/ (accessed on 14 November 2016).
- MATLAB® R2014a [Computer Software], the MathWorks Australia Pty. Ltd, Chatswood, NSW, Australia. Available online: https://au.mathworks.com/products/matlab.html (accessed on 12 December 2016).
- Lukac, R.; Smolka, B.; Martin, K.; Plataniotis, K.N.; Venetsanopoulos, A.N. Vector filtering for color imaging. IEEE Signal Process. Mag. 2005, 22, 74–86. [Google Scholar] [CrossRef]
- Su, Z.; Wang, X.; Chen, Z.; Ye, L.; Wang, D. A built-in active sensor network for health monitoring of composite structures. Smart Mater. Struct. 2006, 15, 1939. [Google Scholar] [CrossRef]

© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giri, P.; Kharkovsky, S.; Samali, B. Inspection of Metal and Concrete Specimens Using Imaging System with Laser Displacement Sensor. Electronics 2017, 6, 36. https://doi.org/10.3390/electronics6020036
Giri P, Kharkovsky S, Samali B. Inspection of Metal and Concrete Specimens Using Imaging System with Laser Displacement Sensor. Electronics. 2017; 6(2):36. https://doi.org/10.3390/electronics6020036
Chicago/Turabian StyleGiri, Paritosh, Sergey Kharkovsky, and Bijan Samali. 2017. "Inspection of Metal and Concrete Specimens Using Imaging System with Laser Displacement Sensor" Electronics 6, no. 2: 36. https://doi.org/10.3390/electronics6020036
APA StyleGiri, P., Kharkovsky, S., & Samali, B. (2017). Inspection of Metal and Concrete Specimens Using Imaging System with Laser Displacement Sensor. Electronics, 6(2), 36. https://doi.org/10.3390/electronics6020036