Cluster Head Relocation Based on Selfish Herd Hypothesis for Prolonging the Life Span of Wireless Sensor Networks



Abstract
:1. Introduction
- It is possible that the sensing of the phenomenon (in the whole area and throughout the time of interest) will not be done correctly.
- It is possible that the sensor nodes will not have enough energy to move during the next round (a concept that will be discussed later).
- The CH-active algorithm minimizes the energy consumed in the communication module of each sensor node, while it overburdens the CH during cluster formation. CH-active does not use a fuzzy logic (FL) model to predicate the expected residual energy of each sensor node (i.e., the predicated remaining energy for being selected as a CH). Instead of this, CH-active relocates solar-powered CHs. Actually, it relocates a small number of nodes (usually 5‒7 CHs in each round) in a WSN, as we shall see in Section 5. As the CH moves to the center of the mass, it minimizes the distance to cluster members and saves energy while receiving data. Also, the CH helps other cluster members because they save energy (the distance decreases) while transmitting to the CH.
- For the relocation purpose, an additional solar-powered battery is used only to move CH, and not for processing and communication tasks. In CH-active, only one solar-powered CH (in each cluster) is allowed to move inside this cluster during every round. Solar-powered batteries are used only for relocating the CH in each round for the following two reasons:
- In some cases, the terrain configuration is harder (e.g., uphill), and nodes demand more energy power, and as a result, we may have an unequal power cost to the WSN nodes.
- If the solar-powered battery was used additionally for communication tasks, this would neutralize the advantages provided by the CH-active algorithm. If we allow the relocation process itself to drain the original sensor batteries in an unbalanced way, which is caused by different solar power available and different consumption due to terrain configuration, we cannot clearly compare the benefits of our algorithm. Therefore, we assume a (separation) scenario, in which solar-powered battery is used only for relocating the CH in each round, while the battery of the sensor node is used only for communication and processing tasks.
- The CH-active algorithm is beneficial, even if we have no solar-powered time periods. In the CH-partially-active algorithm (a modification of CH-active), we examine the situation where CH sensors do not have enough energy (i.e., solar energy is not available) to position themselves in the center of the mass, but they can reach a certain percentage of the distance from their initial position to the center (one part of the path). As we shall see in Section 5, by moving the CH partially to only 25% of the distance towards the center of the masses in a cluster, the lifetime of the WSN is prolonged significantly. To the best of our knowledge, a similar solution has not been proposed.
2. Related Work
3. System Model
3.1. Network Model
- Data are transmitted rarely, once or a few times daily.
- The BS is not subject to energy restrictions and has strong communication and computation capabilities.
- The sensor nodes have enough power to reach the BS.
- The sensor nodes are energy-constrained and have the same capabilities.
- Each sensor node can change its transmission power level dynamically in order to adapt to a certain communication distance.
- A sensor node can switch between run and sleep states under the command of a TDMA order.
- An additional solar-powered battery is used only to relocate/move CH, and not for processing and communication.
- The CH has enough time and enough energy in order to move to the optimal location.
- CH relocation is done occasionally in order for the CH to achieve an optimal distance from all of the other sensors inside the cluster.
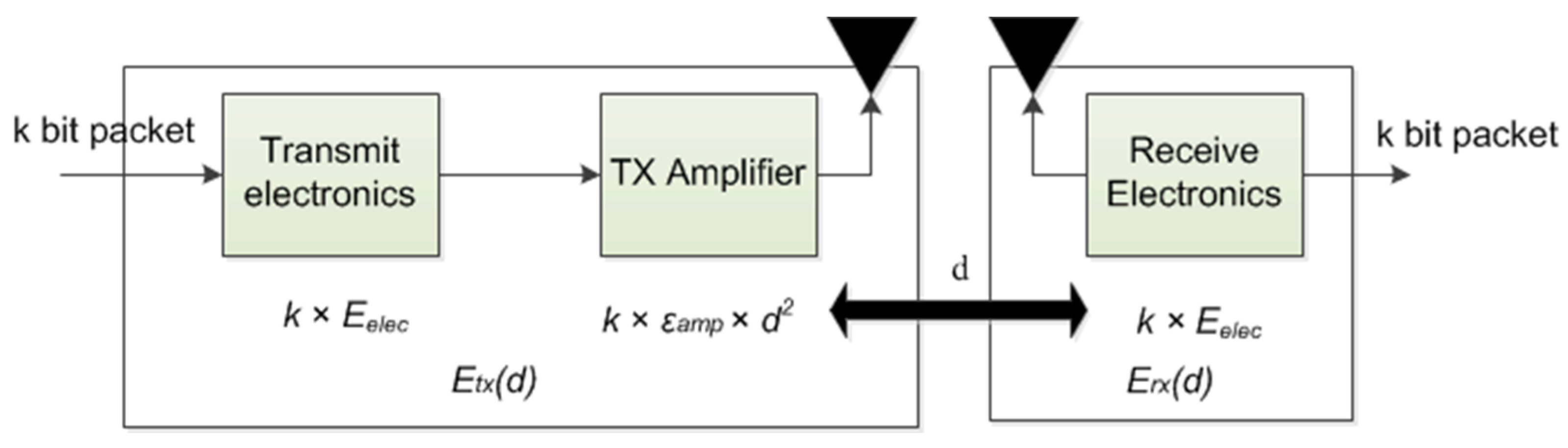
3.2. Energy Model
4. The CH-Active Algorithm
- K is the number of sensors in the cluster;
- ri is the position of each sensor i;
- mi is the mass of each sensor i, we assume that all sensor masses are equal;
- mtot is the total mass of all sensors in the cluster.
| Algorithm 1 The CH-active and the CH-partially-active algorithms |
| Parameters n: number of nodes on terrain n_active: number of active nodes x,y: dimensions of the field x_sink, y_sink: sink position (x,y) node_energy: energy dedicated to the nodes initial_node_energy: initial energy per node message_length: length of the messages round_number: number of round in progress epoch_number: number of epoch in progress 1: Distribute nodes randomly on the terrain 2: Prepare the (4D) matrix for storage of all node parameters and statuses in all rounds and all epochs 3: While number of active nodes > 0 4: Start new round 5: If round_number > 20 start a new epoch 6: Filter-out the nodes with no power 7: Choose the CHs from live nodes 8: Mark used CH statuses for chosen CHs in the matrix 9: Choose the CH for each individual sensor node—create clusters 10: Calculate the center of masses of all nodes in each created cluster 11: Case 1: 12: If Method = CH-partially-active 13: Move the CHs partially toward the center of masses of still active nodes of the cluster 14: Endif 15: Case 2: 16: If Method = CH-active 17: Move the CHs to the very center of masses of still active nodes of the cluster 18: Endif 19: For i = 1 to n 20: If i is not in cluster: Send the sensed data to the sink 21: If i is in cluster: Send the sensed data to the CH 22: Move the CH back to the initial position 23: Aggregate data on the CH 24: Send their data from the CH to the sink 25: Endif 26: End while |
5. Simulation Results and Discussion
5.1. Simulation Model
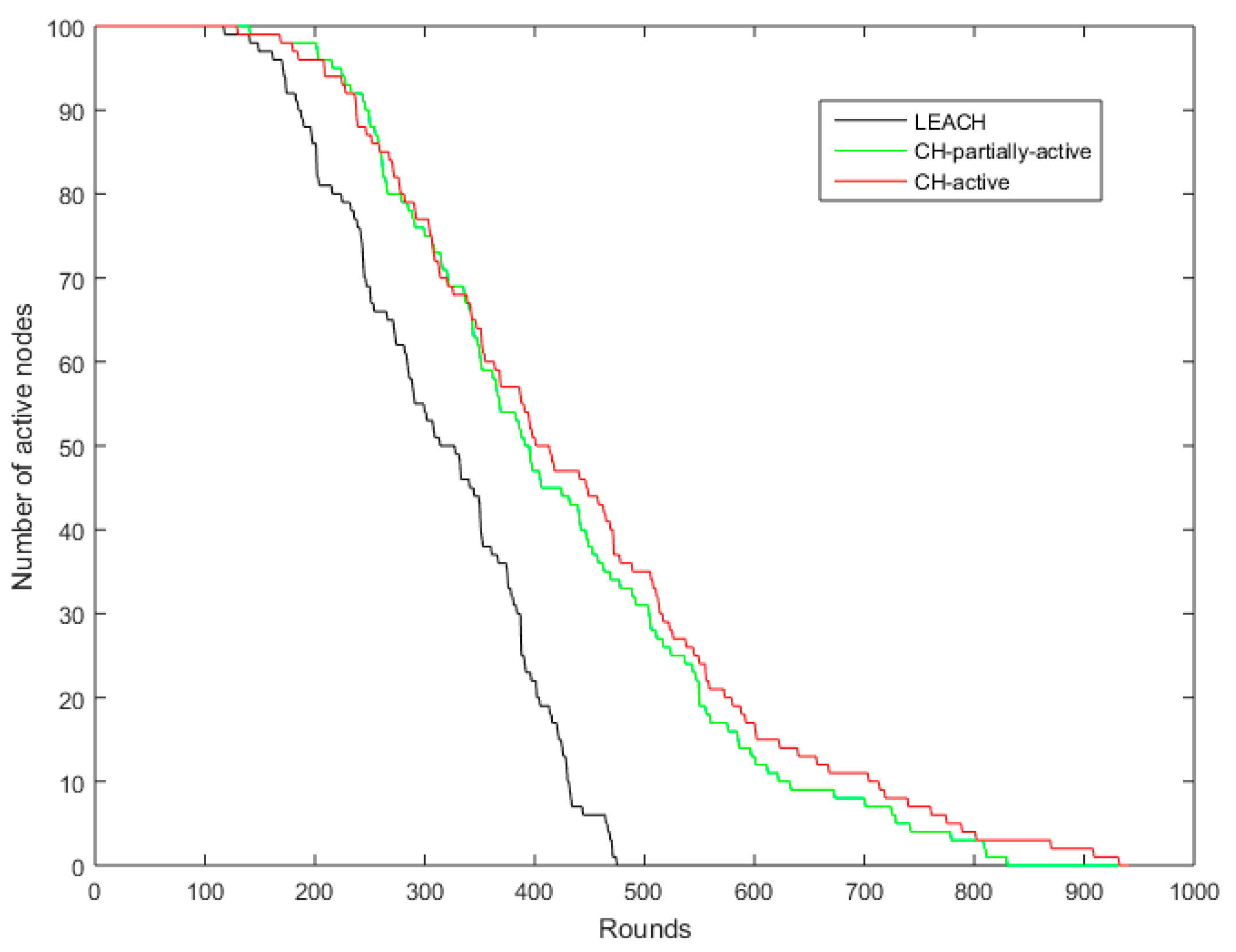
5.2. Number of Active Nodes
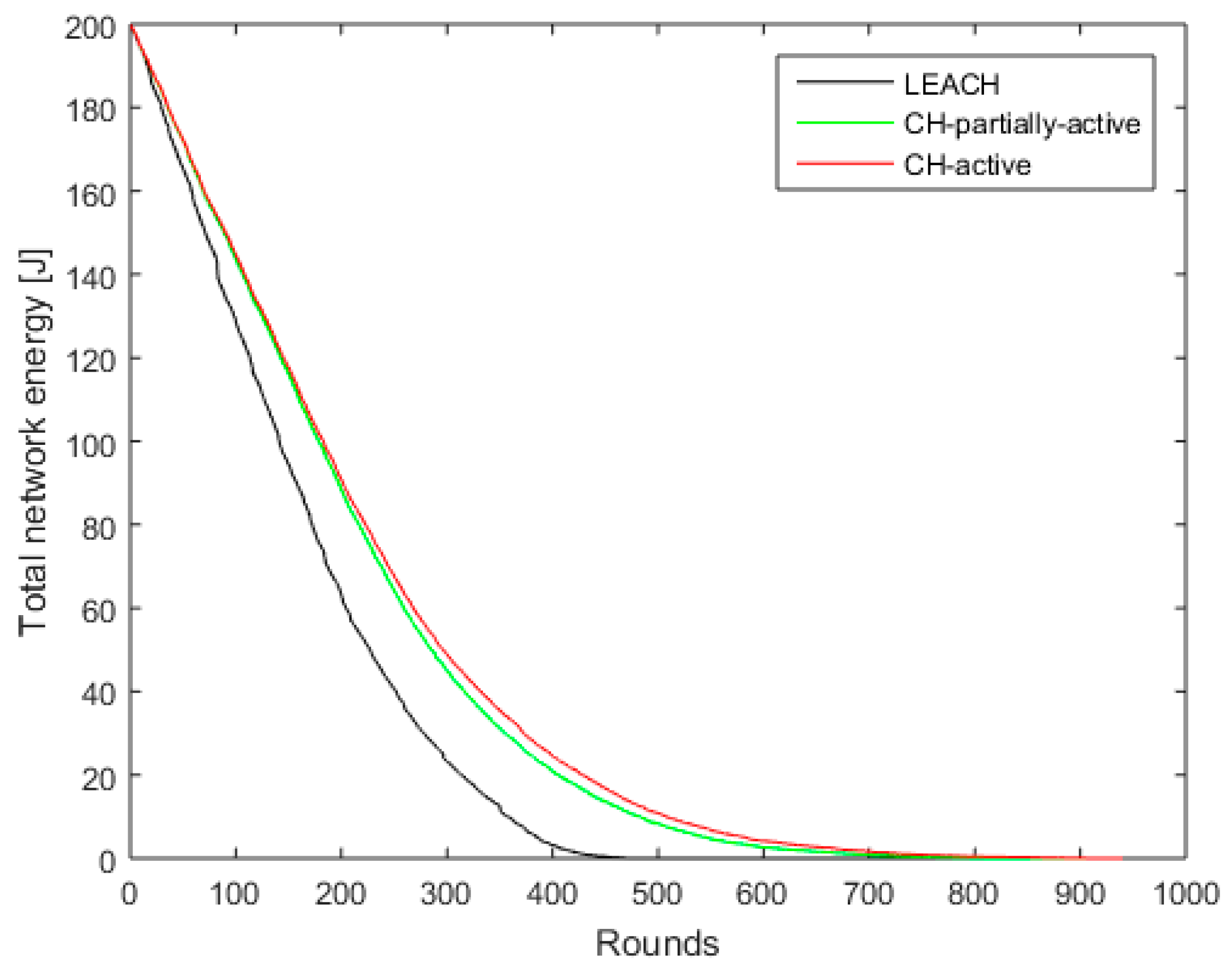
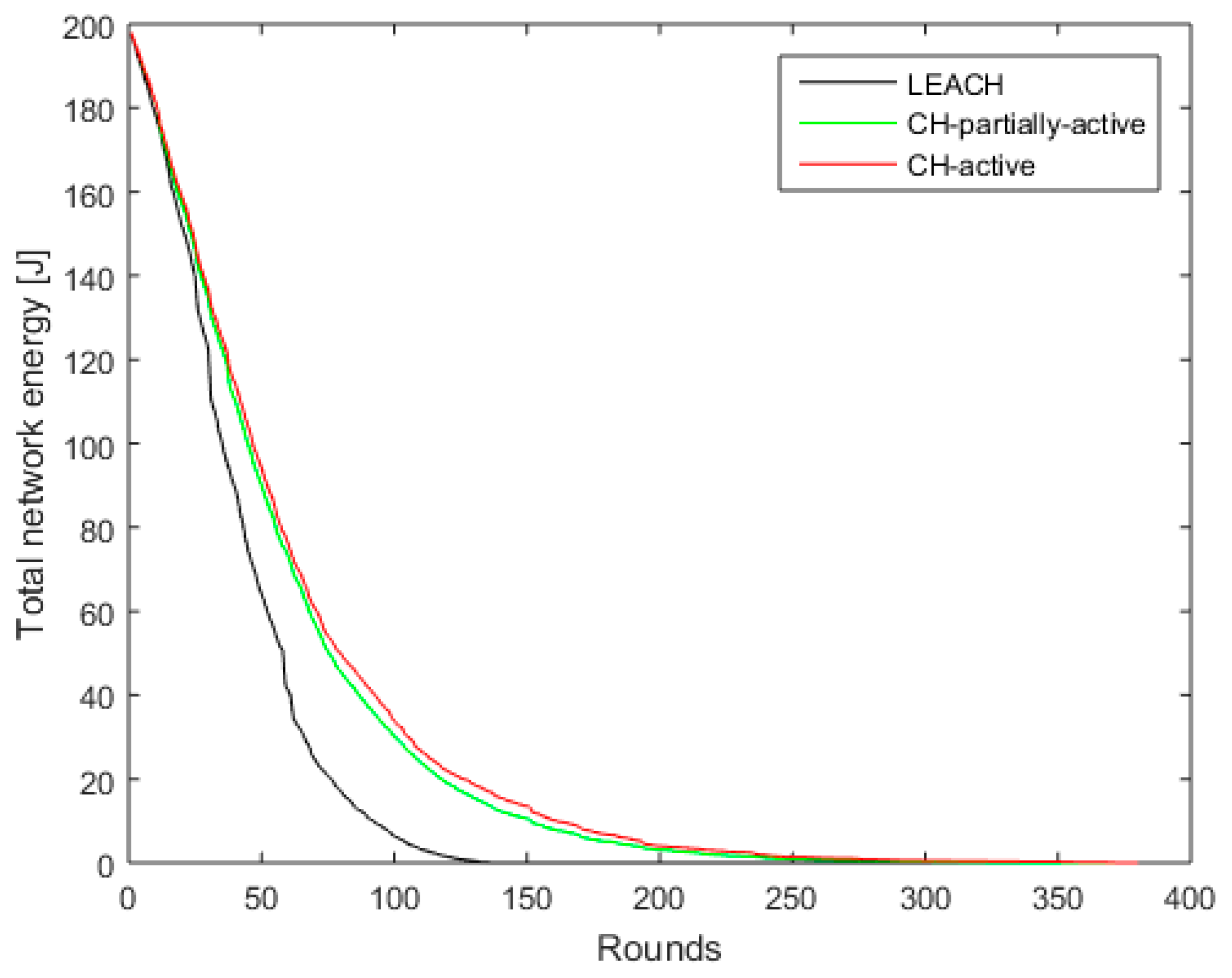
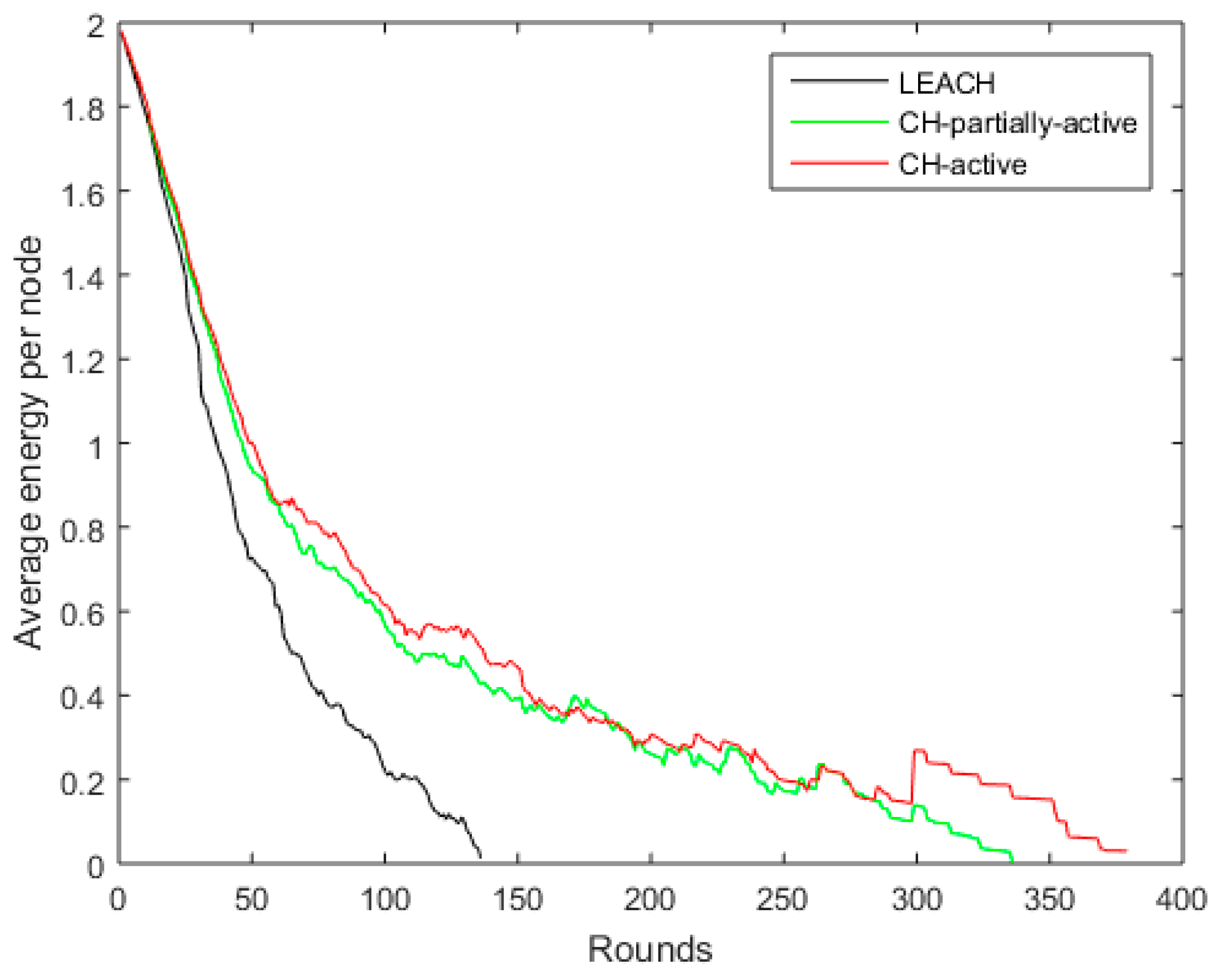
5.3. Energy of the Network
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BS | Base station |
| CH | Cluster head |
| LEACH | Low-energy adaptive clustering hierarchy |
| PCLA | Partial coverage with learning automata |
| PSO | Particle swarm optimization |
| TDMA | Time-division multiple access |
| WSN | Wireless sensor network |
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Pantazis, N.A.; Nikolidakis, S.A.; Vergados, D.D. Energy Efficient Routing Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 551–591. [Google Scholar] [CrossRef]
- Anisi, M.H.; Abdul-Salaam, G.; Idris, M.Y.I.; Wahab, A.W.A.; Ahmedy, I. Energy Harvesting and Battery Power based Routing in Wireless Sensor Networks. Wirel. Netw. 2017, 23, 249–266. [Google Scholar] [CrossRef]
- Carrano, R.C.; Passos, D.; Magalhaes, L.C.; Albuquerque, C.V.N. Survey and Taxonomy of Duty Cycling Mechanisms in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 181–194. [Google Scholar] [CrossRef]
- Doudou, M.; Djenouri, D.; Badache, N.; Bouabdallah, A. Synchronous Contention-based MAC Protocols for Delay-Sensitive Wireless Sensor Networks: A Review and Taxonomy. J. Netw. Comput. Appl. 2014, 38, 172–184. [Google Scholar] [CrossRef]
- Huang, P.; Xiao, L.; Soltani, S.; Mutka, M.W.; Xi, N. The Evolution of MAC Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 101–120. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Vasilakos, A.V. A Survey on Topology Control in Wireless Sensor Networks: Taxonomy, Comparative Study, and Open Issues. Proc. IEEE 2013, 101, 2538–2557. [Google Scholar] [CrossRef]
- Bagci, H.; Korpeoglu, I.; Yazici, A. A Distributed Fault Tolerant Topology Control Algorithm for Heterogeneous Wireless Sensor Networks. IEEE Trans. Parallel Distrib. 2015, 26, 914–923. [Google Scholar] [CrossRef] [Green Version]
- Deniz, F.; Bagci, H.; Korpeoglu, I.; Yazıcı, A. An Adaptive, Energy-aware and Distributed Fault-tolerant Topology Control Algorithm for Heterogeneous Wireless Sensor Networks. Ad Hoc Netw. 2016, 44, 104–117. [Google Scholar] [CrossRef]
- Deshpande, A.; Montiel, C.; McLauchlan, L. Wireless Sensor Networks: A Comparative Study for Energy Minimization using Topology Control. In Proceedings of the 2014 Sixth Annual IEEE Green Technologies Conference (GreenTech), Corpus Christi, TX, USA, 3–4 April 2014; pp. 44–48. [Google Scholar]
- Dong, M.; Ota, K.; Liu, A. RMER: Reliable and Energy Efficient Data Collection for Large-scale Wireless Sensor Networks. IEEE Internet Things 2016, 3, 511–519. [Google Scholar] [CrossRef]
- Liu, C.X.; Liu, Y.; Zhang, Z.J.; Cheng, Z.-Y. High Energy-efficient and Privacy-preserving Secure Data Aggregation for Wireless Sensor Networks. Int. J. Commun. Syst. 2013, 26, 380–394. [Google Scholar] [CrossRef]
- Sran, S.S.; Kaur, L.; Kaur, G.; Sidhu, K.S. Energy aware chain based Data Aggregation Scheme for Wireless Sensor Network. In Proceedings of the 2015 International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 113–117. [Google Scholar]
- Fu, B.; Xiao, Y.; Deng, H.; Zeng, H. A Survey of Cross-layer Designs in Wireless Networks. IEEE Commun. Surv. Tutor. 2014, 16, 110–126. [Google Scholar] [CrossRef]
- Liu, J.; Xia, C.H.; Shroff, N.B.; Sherali, H.D. Distributed Cross-layer Optimization in Wireless Networks: A Second-order Approach. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2103–2111. [Google Scholar]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An Application-specific Protocol Architecture for Wireless Microsensor Networks. IEEE Trans. Parallel Distrib. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Popovic, G.; Djukanovic, G. Cluster Formation Techniques in Hierarchical Routing Protocols for Wireless Sensor Networks. J. Inf. Technol. Appl. 2016, 1, 5–11. [Google Scholar] [CrossRef]
- Hamilton, W.D. Geometry for the Selfish Herd. J. Theor. Biol. 1971, 31, 295–311. [Google Scholar] [CrossRef]
- Fan, X.N.; Song, Y.L. Improvement on LEACH Protocol of Wireless Sensor Network. In Proceedings of the International Conference on Sensor Technologies and Applications, Valencia, Spain, 14–20 October 2007; pp. 260–264. [Google Scholar]
- Dembla, D.; Shivam, H. Analysis and Implementation of Improved-LEACH Protocol for Wireless Sensor Network (I-LEACH). IJCSC 2013, 4, 8–12. [Google Scholar]
- Kim, D.S.; Chung, Y.J. Self-organization Routing Protocol Supporting Mobile Nodes for Wireless Sensor Network. In Proceedings of the First International Multi-Symposiums on Computer and Computational Sciences (IMSCCS′06), Hangzhou, China, 17 November 2008; pp. 622–626. [Google Scholar]
- Sibley, G.T.; Rahimi, M.H.; Sukhatme, G.S. Robomote: A Tiny Mobile Robot Platform for Large-scale Ad-hoc Sensor Networks. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 11–15 May 2002; pp. 1143–1148. [Google Scholar]
- Ma, M.; Yang, Y. Clustering and Load balancing in Hybrid Sensor Networks with Mobile Cluster Heads. In Proceedings of the 3rd International Conference on Quality of Service in Heterogeneous Wired/Wireless Networks, Waterloo, ON, Canada, 7–9 August 2006. [Google Scholar]
- Banerjee, T.; Xie, T.B.; Jun, J.H.; Agrawal, D.P. Increasing Lifetime of Wireless Sensor Networks using Controllable Mobile Cluster Heads. Wirel. Commun. Mob. Comput. 2010, 3, 313–336. [Google Scholar]
- Voigt, T.; Ritter, H.; Schiller, J.; Dunkels, A.; Alonso, J. Solar-aware Clustering in Wireless Sensor Networks. In Proceedings of the Ninth IEEE Symposium on Computers and Communications, Alexandria, Egypt, 28 June–1 July 2004; pp. 238–243. [Google Scholar]
- Gongben, C.; Shaorong, W. A Novel Node Deployment and Clustering Scheme in Wireless Sensor Networks. In Proceedings of the Second International Symposium on Electronic Commerce and Security (ISECS′09), Nanchang, China, 22–24 May 2009; pp. 499–503. [Google Scholar]
- Islam, J.; Islam, M.; Islam, N. A-sLEACH: An Advanced Solar aware LEACH Protocol for Energy Efficient Routing in Wireless Sensor Networks. In Proceedings of the Sixth International Conference on Networking (ICN′07), Martinique, France, 22–28 April 2007. [Google Scholar]
- Sendra, S.; Parra, L.; Lloret, J.; Khan, S. Systems and Algorithms for Wireless Sensor Networks based on Animal and Natural Behavior. Int. J. Distrib. Sens. Net. 2015, 2, 1–19. [Google Scholar] [CrossRef]
- Kumar, S.; Kusuma, S.M. Clustering Protocol for Wireless Sensor Networks based on Rhesus Macaque (Macaca mulatta) Animal’s Social Behavior. Int. J. Comput. Appl. 2014, 87, 20–27. [Google Scholar]
- Barve, A.; Nene, M.J. Survey of Flocking Algorithms in Multi-agent Systems. Int. J. Comput. Sci. Issues 2013, 6, 110–117. [Google Scholar]
- Singh, S.S.; Kumar, M.; Saxena, R. Priya, Application of Particle Swarm Optimization for Energy Efficient Wireless Sensor network: A Survey. Int. J. Eng. Sci. Adv. Technol. 2012, 5, 1246–1250. [Google Scholar]
- Antoniou, P.; Pitsillides, A.; Blackwell, T.; Engelbrecht, A.; Michael, L. From Bird Flocks to Wireless Sensor Networks: A Congestion Control Approach; Tech. Rep. TR-11-5; University of Cyprus: Nicosia, Cyprus, 2011. [Google Scholar]
- Ruihua, Z.; Zhiping, J.; Xin, L.; Dongxue, H. Double Clusterheads Clustering Algorithm for Wireless Sensor Networks using PSO. In Proceedings of the 6th IEEE Conference on Industrial Electronics and Applications (ICIEA′11), Beijing, China, 21–23 June 2011; pp. 763–766. [Google Scholar]
- Showkat, M.J.; Paul, B.; Matin, M.A.; Alam, M.S. Optimal Sink Location in Wireless Sensor Networks using Particle Swarm Optimization. In Proceedings of the IEEE International Conference on Antennas, Propagation and Systems (INAS 2009), Johor Bahru, Malaysia, 3–5 December 2009. [Google Scholar]
- Lee, J.S.; Cheng, W.L. Fuzzy-logic-based clustering approach for wireless sensor networks using energy predication. IEEE Sens. J. 2012, 12, 2891–2897. [Google Scholar] [CrossRef]
- Kim, J.M.; Park, S.H.; Han, Y.J.; Chung, T.M. CHEF: Cluster head election mechanism using fuzzy logic in wireless sensor networks. In Proceedings of the 10th International Conference Advanced Communication Technology 2008 (ICACT 2008); Gangwon-Do, Korea, 17–20 February 2008; Volume 1, pp. 654–659. [Google Scholar]
- Nayak, P.; Devulapalli, A. A fuzzy logic-based clustering algorithm for WSN to extend the network lifetime. IEEE Sens. J. 2016, 16, 137–144. [Google Scholar] [CrossRef]
- Nayak, P.; Vathasavai, B. Energy efficient clustering algorithm for multi-hop wireless sensor network using type-2 fuzzy logic. IEEE Sens. J. 2017, 17, 4492–4499. [Google Scholar] [CrossRef]
- Collotta, M.; Pau, G.; Maniscalco, V. A fuzzy logic approach by using particle swarm optimization for effective energy management in IWSNs. IEEE Trans. Ind. Electron. 2017, 64, 9496–9506. [Google Scholar] [CrossRef]
- Mostafaei, H.; Montieri, A.; Persico, V.; Pescapé, A. A sleep scheduling approach based on learning automata for WSN partial coverage. J. Netw. Comput. Appl. 2017, 80, 67–78. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A. Energy efficient Communication Protocol for Wireless Microsensor Networks. In Proceedings of the 33rd Hawaii International Conference on System Sciences (HICSS′00), Maui, HI, USA, 7 January 2000. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Case 1 | Case 2 |
|---|---|---|
| Sensing field (terrain dimensions) | 500 m × 500 m | 1000 m × 1000 m |
| BS position (x_sink, y_sink) | (0, −100) | (0, −100) |
| Number of sensor nodes in the field (n) | 100 | 100 |
| Data packet length (message length) | 2000 bytes | 2000 bytes |
| Signal packet | 100 bytes | 100 bytes |
| Eelec | 50 nanoJoules/bit | 50 nanoJoules/bit |
| E0 (initial_node_energy) | 2 J | 2 J |
| The percentage of the path to the center of the masses that is covered | 25% | 25% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popovic, G.; Djukanovic, G.; Kanellopoulos, D. Cluster Head Relocation Based on Selfish Herd Hypothesis for Prolonging the Life Span of Wireless Sensor Networks. Electronics 2018, 7, 403. https://doi.org/10.3390/electronics7120403
Popovic G, Djukanovic G, Kanellopoulos D. Cluster Head Relocation Based on Selfish Herd Hypothesis for Prolonging the Life Span of Wireless Sensor Networks. Electronics. 2018; 7(12):403. https://doi.org/10.3390/electronics7120403
Chicago/Turabian StylePopovic, Goran, Goran Djukanovic, and Dimitris Kanellopoulos. 2018. "Cluster Head Relocation Based on Selfish Herd Hypothesis for Prolonging the Life Span of Wireless Sensor Networks" Electronics 7, no. 12: 403. https://doi.org/10.3390/electronics7120403