Abstract
The monitoring and control of renewable energy sources (RESs) based on DC (Direct Current) microgrids (DC MG) are gaining much consideration at this time. In comparison with the isolated individual control of converters in a microgrid, DC microgrids provide better voltage regulation and harmonized energy generation/consumption. To address the inherent vulnerability of communication links, robust methods have been proposed that improve the resilience of communication-based control. However, the failure of the communication links in microgrid control layers remains a considerable issue that may lead to one or more nodes being disconnected and operating as a communication island. Such types of communication islanding may cause the unpredictable behavior of the system and further destabilization may lead to a cascaded failure. This paper proposes a fast algorithm to detect and evaluate network connectivity based on the information stored at every node in the form of a look-up table. The control structure has been modified under communication islanding, and a communication connectivity observer is used at every node to detect and address power flow issues under communication islanding. The proposed method has been verified through mathematical analysis, simulation, and experimental results.
1. Introduction
The DC distribution system provides simple and viable solutions to many problems encountered in the AC (Alternative Current) distribution network such as inrush transformer currents, frequency synchronization, and complicated reactive power flow control. Furthermore, the development of semiconductor devices in the last decade has made the flexible conversion of DC power possible [1,2,3]. During the past decade, the power grid has evolved appreciably due to the incorporation of more distributed generation systems installed at the consumer end with the aim to make the system more efficient and sustainable. This has led to more complex power system dynamics that pose greater challenges to organize, control, and manage these systems. Autonomous renewable energy source (RES)-based distributed networks are referred to as microgrids that can be developed as independently operating smaller regions in a larger power network. Therefore, the challenge is to conceive a viable system that can share the load and that works in parallel with the conventional power grid. Conventional grids contain renewable energy resources as well as conventional generation units and loads which make the system more complicated [4,5,6].
The inclusion of RES-based DC microgrids at the distribution level appeals more to system designers due to a greater penetration of electric vehicles and energy storage units. Furthermore, the microgrids provide simpler control methods for operation, where most consumer loads are fundamentally drawing DC current at the consumer level [7,8]. Connecting large-scale RES-based DC microgrids needs a control scheme for achieving the required operation. The control of RES-based DC microgrids requires centralized, decentralized, and distributed control schemes for hierarchical control. Hierarchical control is composed of primary, secondary, and tertiary level controls [8,9,10]. For primary control, every node uses a localized droop mechanism that strives to achieve the required load sharing by varying the droop virtual resistance to keep the dynamics of the system stable individually [11,12,13]. Therefore, for integration on a large scale, every node must follow common reference set points that have been set by higher-level controls. Alternatively, the node can work only on a droop mechanism locally. Secondary controls form the outer loop on top of the primary control. At the secondary level, all the nodes share the values with their neighbors to observe and converge the system to one common set point for the system to remain stable and balanced [14,15,16]. Secondary and tertiary controls are implemented in a centralized or decentralized fashion where they communicate with their neighbors through communication links. Any failure or uncertainty in the link can lead the individual systems to cause instability and failure of the node which will stress all the other healthy nodes of the system, leading possibly to a cascaded failure [17,18,19]. Since this adds complexity to the system with respect to centralized control and scalability, distributed control schemes are therefore an attractive option for providing more reliability with a simpler communication network topology, thereby reducing the cost [20,21,22]. Secondary control updates the set point at every distributed energy resource with neighbors in a low bandwidth communication network. Algorithms for system stability and robustness against uncertainty were used by using graph theory and matrix theory techniques [17,23]. RES-based DC microgrid communication systems have problems with communication delay due to the time it takes to exchange information with neighbors. These delays affect the system stability and response to load imbalances. The system should respond in time to adjust the set points for every node [18,24,25]. In a bi-directional communication network, when the communication channel transmits a large volume of data, errors in communication may occur and this may affect the system performance [26,27]. Due to the renewable energy-based distributed generation units (DGU) with intermittent nature, microgrids require faster controls [28,29]. In an intermittent system, communication link failure can make nodes over-stressed because of a mismatch in operating reference. Over-stressed nodes may lead the network to instability and cascaded failure. Previously, authors have implemented a simple approach to stabilize a system by disconnecting the secondary control in the case of communication link failure and shifting the system to constant reference. The main drawback in constant reference is that every node has a constant reference which may be different. This constant reference approach is also limited to ring-connected control [30,31]. However, for higher communication reliability, more complex communication networks are normally used in practical systems. This paper proposes a new algorithm to effectively detect communication islanding and maintain system stability while maximizing the performance for more complex networks. The noteworthy contributions of this proposed algorithm are the following:
- Every node stores the information about network links, and on that basis detects communication islanding with minimum data exchange.
- After detecting communication link failure, the proposed algorithm modifies the control to maintain operation and stability. In this manner, every node can act quickly to maintain the network variables for a reliable operation and control.
- A small signal model is used to check the system stability during communication islanding.
The rest of the paper is organized as follows: Section 2 introduces the communication link failure and its impacts. Section 3 explains the detection of communication islanding using graph theory. In Section 4, the control scheme is explained, whereas the case study and the simulation results are found in Section 5. Experimental results are shown in Section 6. Finally, Section 7 concludes the paper.
2. Communication Link Failure and Impacts
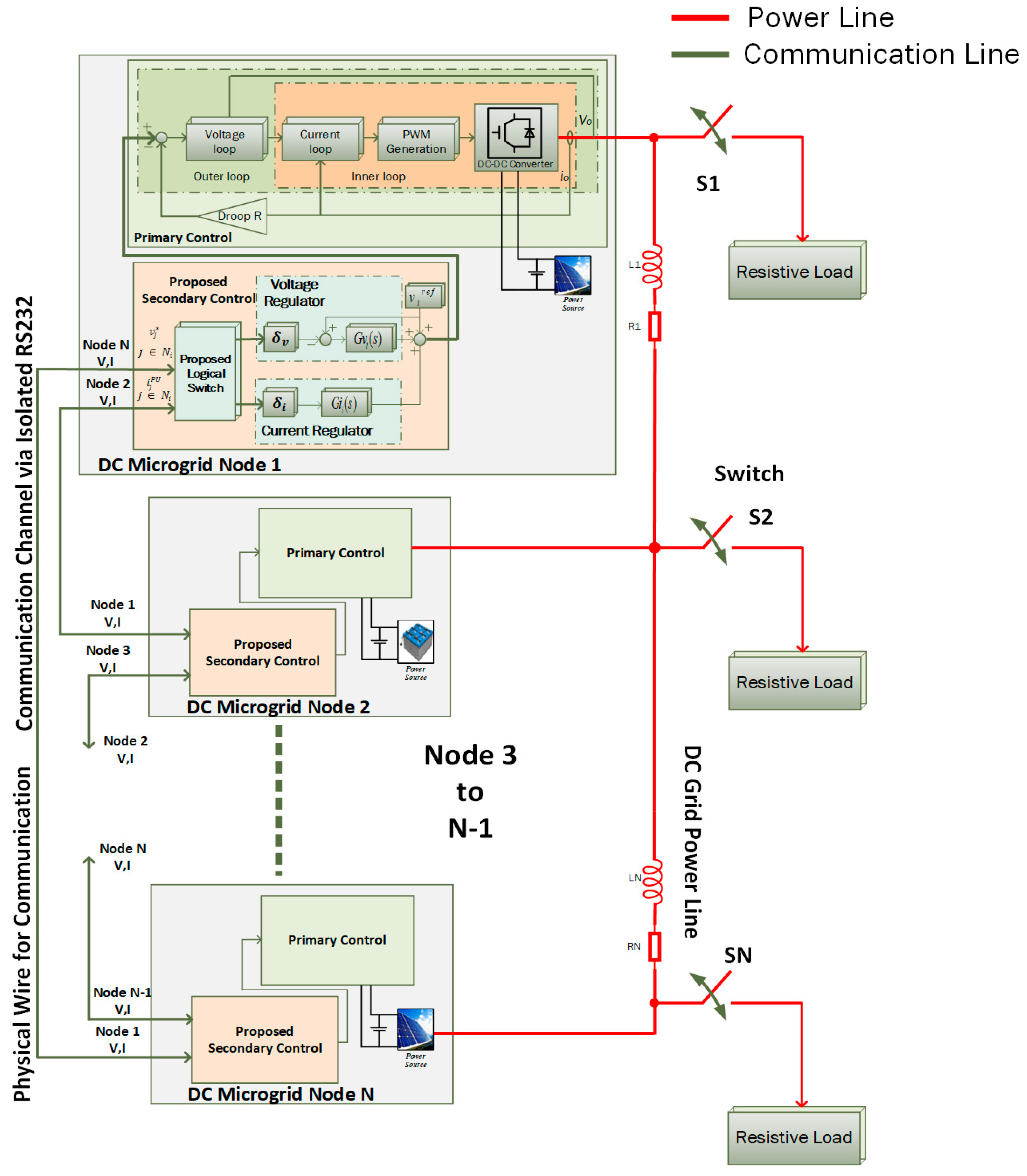
Multi-agent systems use graphical representation extensively for mapping microgrid information layer connectivity in consensus-based networks where a secondary controller is implemented [20]. Using a sparse network, every node can exchange information with its respective neighbors, as is shown in Figure 1. If a communication link failure or uncertainty occurs in the information network, it may affect the system operation and stability, due to a mismatch in reference operating points. Single or multiple nodes can be disconnected from the communication system. These disconnected nodes may behave as a load, which affect the system performance. This may lead the disconnected communication nodes to become unstable and produce the failure of the conventional secondary control, which stresses other nodes of the communication system, eventually leading to a cascaded failure. Thus, nodes are very sensitive to sudden change in network connectivity, so the detection of a communication island should be fast enough to respond in time and preserve system stability. To achieve this, information about the network connectivity map is exchanged between nodes, as is shown in Figure 1. One method for the control of such disconnected communication islanded nodes is to shift them to primary control. On the other hand, other connected nodes are working as a consensus-based control. In this scenario, operating reference points for the disconnected communication nodes and other nodes will be different. This will stress the connected nodes [5,30,31]. To overcome this problem, a non-uniform convergence algorithm has been proposed for the secondary control level, which maintains the look-up table of the DC microgrid communication network at every node. With this look-up table information, disconnection in a graph can be detected. Every node has a degree of intelligence, which is sufficient to process information and check network health. This can be achieved using the network information stored in the form of a look-up table at every node by using the proposed islanding detection algorithm. The proposed algorithm node structure and flow chart are shown in Figure 2a,b, respectively.
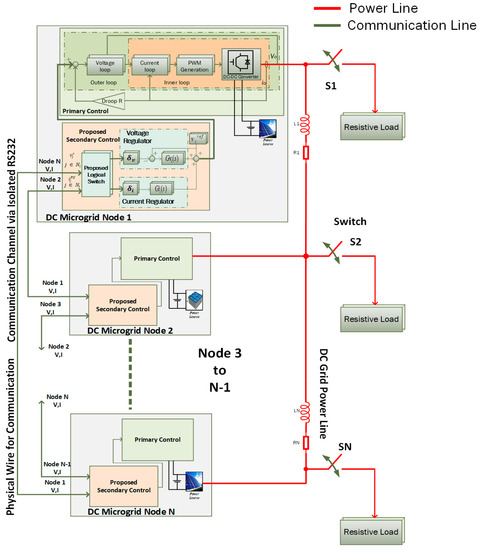
Figure 1.
Proposed control network layout for a renewal energy source (RES)-based DC microgrid (DC MG).
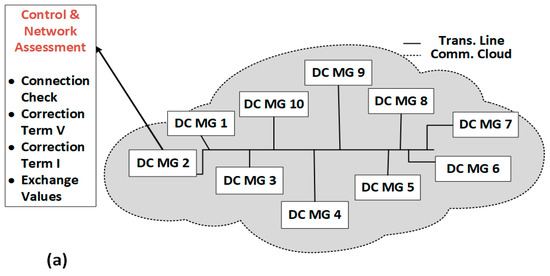
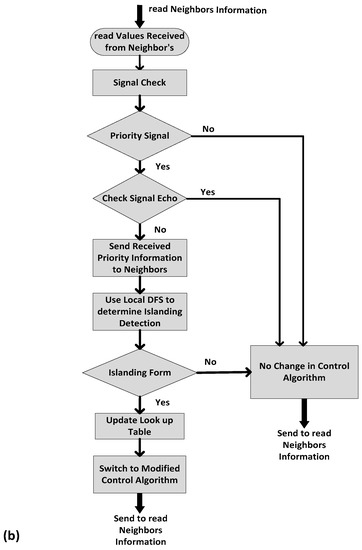
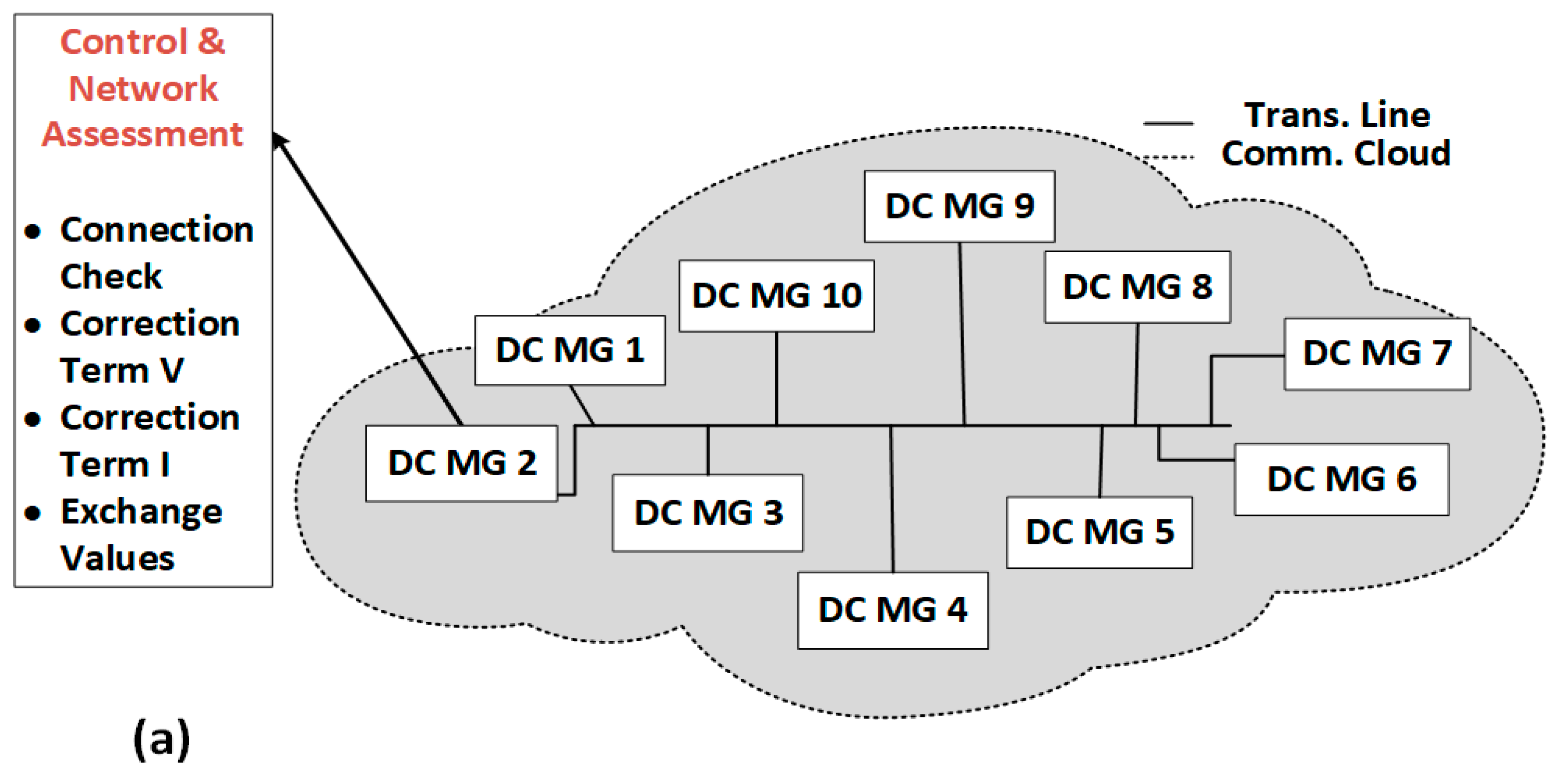
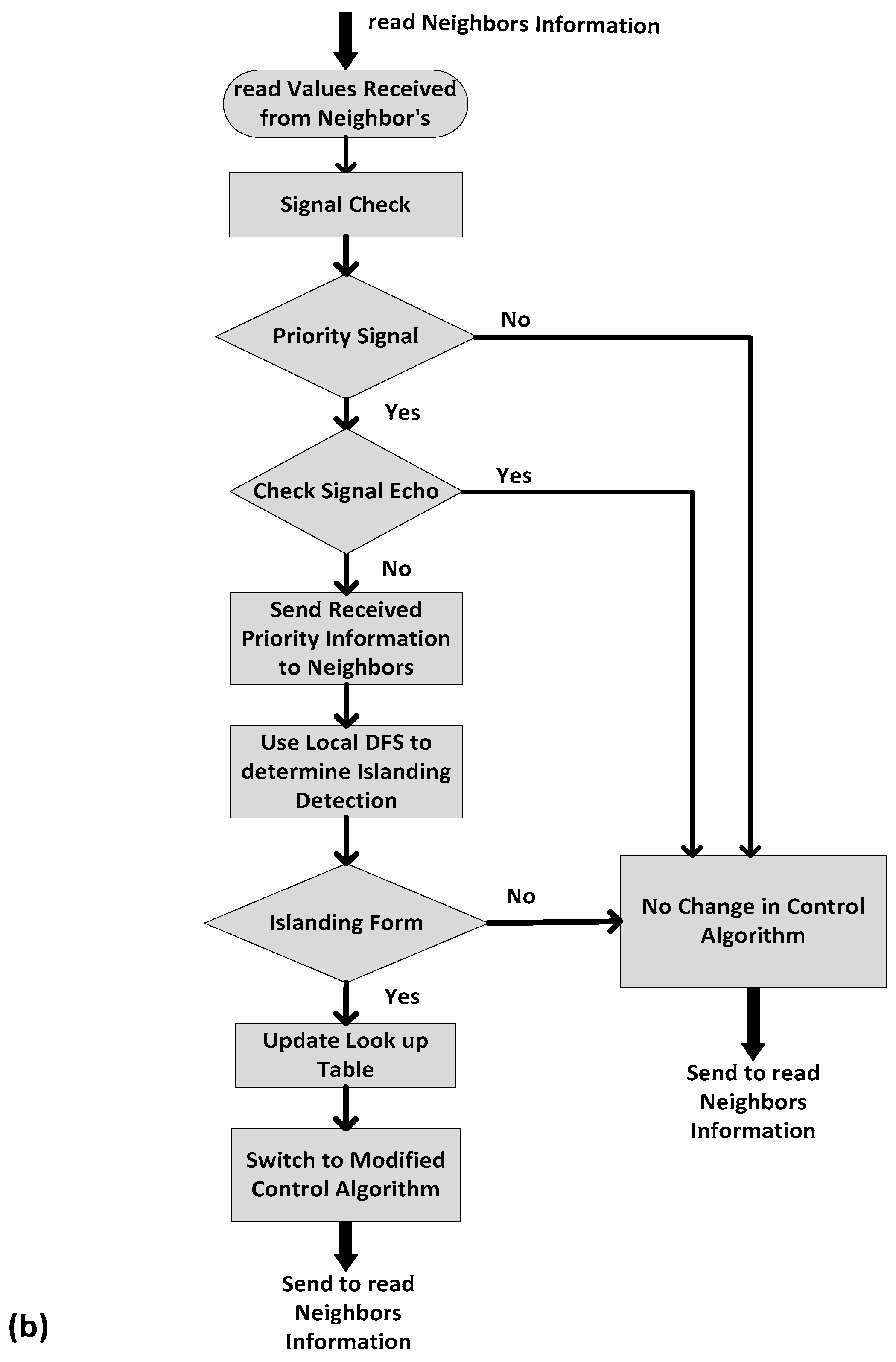
Figure 2.
RE-based DC microgrid system: (a) proposed algorithm structure on one node; (b) flow chart for algorithm.
3. Islanding Detection Algorithm
A multi-agent consensus-based algorithm works with multiple participating nodes, as is shown in Figure 1. Every node consists of a renewable energy-based source, which uses primary control and secondary consensus-based control, in addition to the network status layer. In the proposed structure, the islanding detection algorithm was added with a consensus to detect and observe the connectivity of the di-graph, using the information exchange between neighbors. Every node generates a look-up table of a connected graph, based on the information exchange between neighbors. There are two kinds of information—regular information and priority signals. Regular information is exchanged among nodes, and priority signals are generated only in the case of communication link failure. These signals are used to update the look-up table for the connected network and to look for consequences. If any link failure occurs, these disconnected nodes will then generate a priority signal and send it to immediate neighbors and share onwards. Every node checks for a priority signal to re-evaluate the look-up table of connectivity and generates a new connected graph table using that information. It detects a link failure in time to take corrective measures, by searching through the look-up table [30,31,32,33].
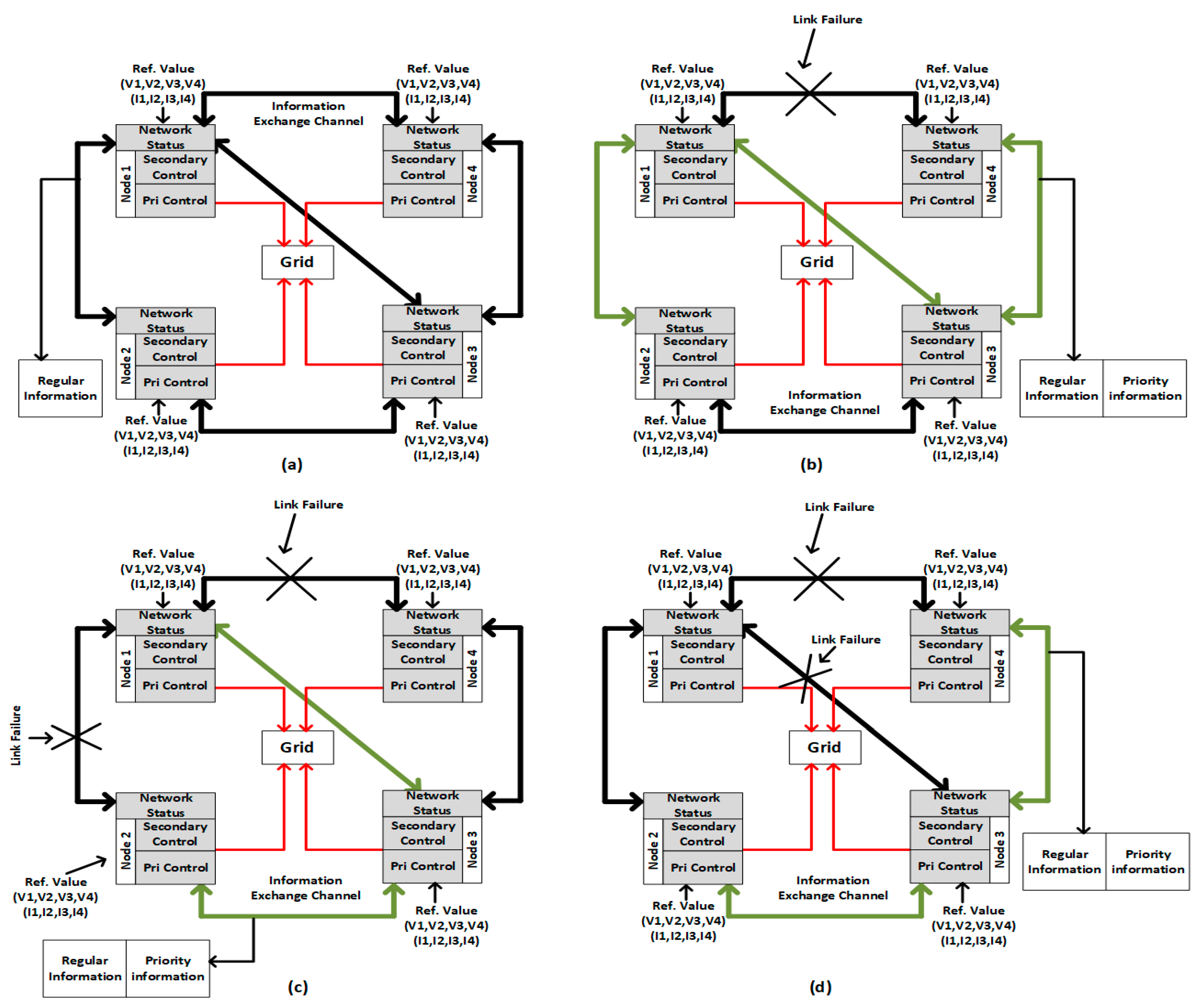
As an example, a multi-agent consensus-based system with four nodes is shown in Figure 3. All the nodes share a set of information which every node uses to generate a look-up table of connected nodes as in Figure 3a. When a fault occurs and the single link is disconnected, as in Figure 3b, the disconnected nodes (1 and 4) generate priority signals and send them to their neighbor nodes. Supposedly, if another link fails, the next disconnected nodes 1 and 2 will then, in the same way, check the look-up table to the connected graph to generate a priority signal and send it to the neighbor node 3, as in Figure 3c. In the worst case scenario, if the third link of node 1, as in Figure 3d, is disconnected, node 1 will become completely islanded from the communication network. In that case, node 3 will send priority signals to its neighboring nodes and the proposed algorithm will re-evaluate the look-up table and detect communication islanding. After detection of communication islanding, the proposed algorithm will change the control structure accordingly to average droop, in order to maintain the operation and stability, which is discussed in Section 4 below. After detecting islanding, all the nodes work on a modified current sharing control to match the reference point with the disconnected node reference to increase system stability. In order to detect the connected nodes and update the look-up table, a graph theory searching algorithm is used, such as depth-first search (DFS) [31,34,35].
Figure 3.
Proposed methodology in a diagrammatic representation. (a) Fully Connected (b) One Link Failure (c) Another Link Failure (d) Islanded Node 1
Graphical Representation and Cutset Formation
This section presents the method developed to process the priority signal information to extract information about island formation. The multi-agent system and the flow of information between neighbors’ nodes can be represented mathematically using graph theory. In graphical terms, a graph is represented by a set of points in space, called vertices, which are connected by a set of lines, called edges. An edge connecting vertices and is designated as , . Vertices showing nodes of the microgrid are represented by and edges are represented by . Edges between nodes, , are represented as an adjacency matrix and the system creates an adjacency matrix as . Data shared between neighboring nodes by edges create a degree matrix: the in-degree matrix , diagonal matrix, , and out-degree matrix , [36]. Using these, the final Laplacian matrix can then be generated as [19,30,32,37]. The Laplacian matrix shows the full connectivity of the network, but the larger Laplacian matrix is not very convenient to compute. Another method using the graphical representation matrix to search rapidly for node connectivity, that is, the depth-first search (DFS) algorithm which is extensively used for solving theoretical and artificial intelligence problems, can be used to detect connectivity [32,33,34].
Lemma 1: Let graph , for each node(vertices) (node), create a look-up table for containing all vertices , such that . The look-up table is called an adjacency list for the vertex. A set of look-up tables at each node in graph is called an adjacent structure for the graph . A graph can have many adjacency structures because every edge around the vertex creates a direct adjacency structure and every structure leads to a unique arrangement of edges at each vertex. The depth-first search method (DFS) described in Algorithm 1 [31,32] works more efficiently using the adjacency structure. The output from this algorithm consists of edges . The DFS algorithm label is , depth-first index for every vertex . Initially, the value is equal to zero, but at the final step, the is the order of last visited vertex [35]. The DFS algorithm details are provided in the appendix.
| Algorithm 1 Depth-first search for graph , where is the adjacency list for |
| Require: A graph represents the physical topology for a DC microgrid. Ensure: the connectivity using DFS and generate look-up table. START Integer k; Routine ; Comment vertex is the parent vertex for vertex in the spanning tree constructed START NUMBER : = k; FOR is the adjacency list if DO START IF is not yet numbered THEN START Construct arc in ; END ELSE IF NUMBER < NUMBER and THEN construct arc in END; END; ; END; |
Lemma 1 gives the cutset, which is equivalent to a communication island. Each node has a DFS algorithm to detect communication islanding. After detecting a link failure, the algorithm updates the control to maintain the system.
4. Control Scheme
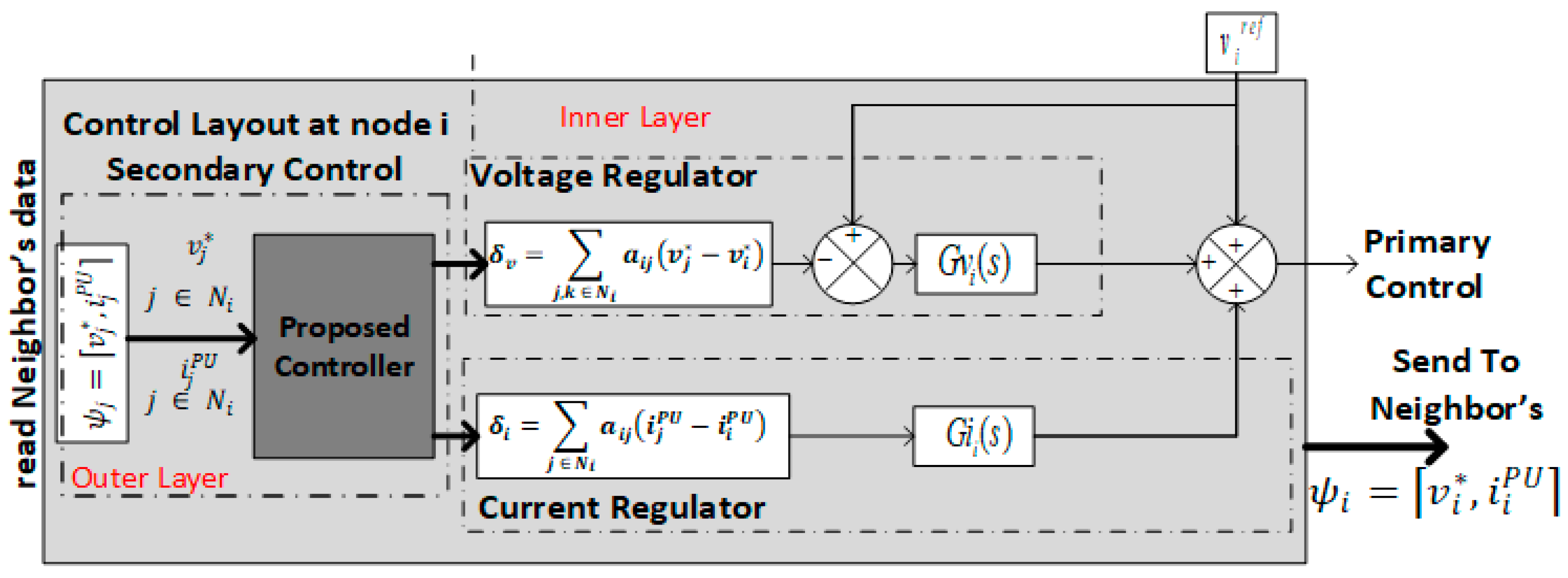
Conventionally, a multi-agent-based control of grid-tied inverters consists of a secondary control that lacks additional auxiliary control [8,38,39]. If the secondary control fails, then the conventional control will become unstable and affect system operation. However, the proposed technique overcomes the communication islanding issue, which involves two different layers of control level, that is, an inner layer and an outer layer, as is shown in Figure 4. The inner layer deals with the consensus-based voltage and current regulator, whereas the outer layer consists of an auxiliary proposed control [5,40]. This outer layer is implemented as an auxiliary control to observe and store connectivity information exchanged with neighbors and search for connected nodes using a searching algorithm. After this outer layer passes information to the inner layer of voltage and current regulator, the inner layer processes the data received from neighbor nodes, as in Figure 4a. In a multi-agent-based microgrid having two working modes, the first case is fully connected and the second case is communication islanding.
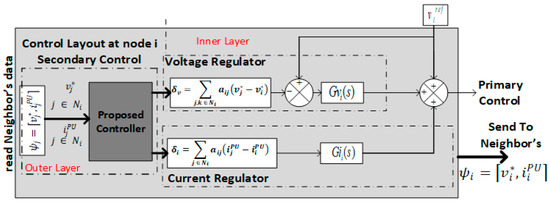
Figure 4.
Proposed secondary control system diagram of a DC microgrid.
4.1. Regular Connected Communication Mode
Consensus-based cooperative control is used in conventional techniques for a fully connected system [14,41,42]. During normal operation, the system works on the consensus secondary control to share and generate correction terms, and the outer layer checks the information shared between nodes, as in Figure 4b [8,25]. Two objectives are achieved using this technique: one is voltage regulation and the other is current sharing. From Figure 4, the individual voltage of the node can be written as follows [43]:
where are the global voltage parameters for reference voltage, voltage correction, and current correction term of the th node. A mismatch between any of the and controller, voltage regulator , and current regulator values is used to adjust the set points. The voltage observer at node receives the neighbors’ voltages as expressed as follows [14]:
Global dynamics of the observer:
An equivalent equation for frequency can be expressed as follows:
where the vector for voltages of every node is and the correction estimation vector is which carries all the global voltage set points of of all nodes. Thus, a cooperative control from the current regulator generates the term for correction by comparing it with the neighbors’ information as in Equation (5) [43]:
where is the weight of the communication link, represents per unit current values measured from neighbors, and is the per unit current value measured at node [14,30].
4.2. Communication Islanding Mode
The detection of a communication island can be achieved through the analysis of data stored in the outer layer by using the proposed algorithm described in the last section. This outer layer forwards the information to the inner layer. Following the communication failure information, one or more communication links fail, which forms smaller islands in the system, as in Figure 5b. These islands compete with each other to maintain their node voltage, which causes instability if it not properly managed. Hence, under such conditions, the voltage regulation can no longer preserve the stability of the system using the secondary layer, as it contradicts the stability of the consensus-based control. A slight change in reference set points generates stress on the communication islanded nodes. Because of that situation, the voltage regulation cannot be achieved. However, current sharing among all the nodes of an island can still be preserved by applying some modifications to the control structure. Redefining can be done for the islands composed of sets of nodes represented by a set , such that and , where k is the number of islands. For such a condition, the current correction term for each island n can be written as follows:
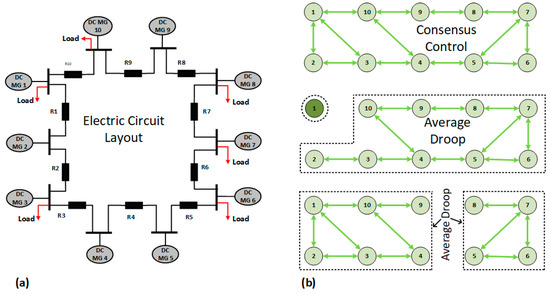
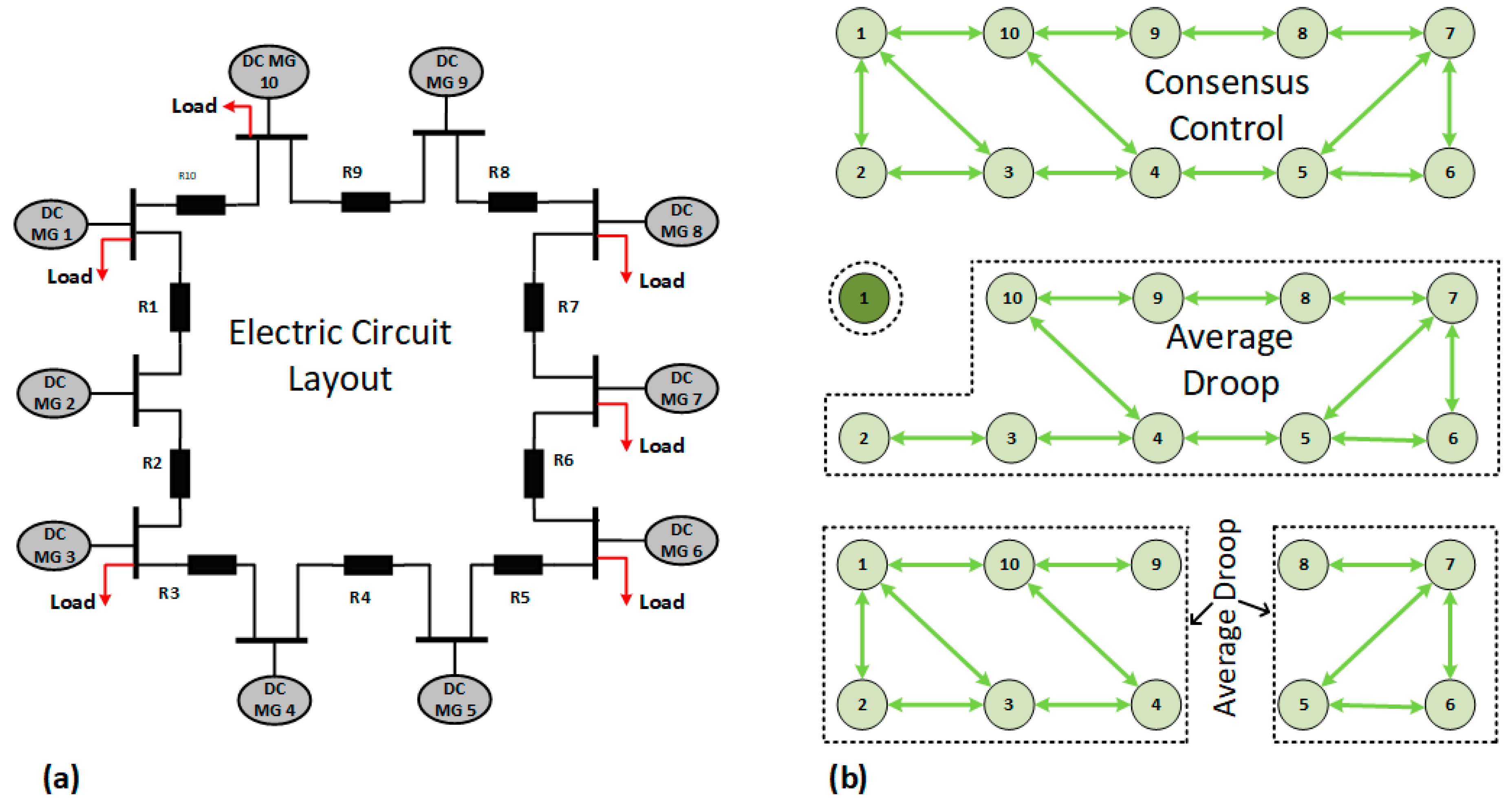
Figure 5.
System diagram: (a) connection of ten-node DC MG; (b) communication scenarios.
Using Equation (6), every node generates an average droop reference, which will be calculated using the average of for a better sharing of current between disconnected nodes.
4.3. System Modeling
This section demonstrates the DC microgrid hierarchical control implemented to model and regulate the DC microgrid network. First, it presents the one-node model and then, the overall system model.
4.3.1. One-Node Model
Multiple DC-DC converters are used to construct DC MG systems, which are mostly used in high switching frequency. Therefore, the non-linearity effects are averaged out in switching frequencies and, based on this fact, the state average model is used for converters. Additionally, the consensus control is approximated as continuous within the time domain. The buck converter’s small signal model is shown in Equation (7) [30,44,45]:
The output values transfer function is as follows:
4.3.2. Overall DC MG System Model
DC MG system model development is important to review; however, the proposed controller affects the steady-state operation and transient response of the DC microgrid. This model will fine-tune the design values and achieve any desired dynamics.
A nonlinear system is probably the outcome of the switching nature of power electronic converters [46]. Hence, small-signal modeling is used, where every variable is expressed as , wherever and are the small-signal perturbation parts and quiescent point. This can be expressed linearly for the th converter as follows:
≈ 0, after neglecting the second order term, can be reduced to:
Let and be the voltages and currents for small-signal values. Additionally, , , , and are vectors, which include small-signal parts of the droop, voltage output, virtual resistance, voltage correction terms, and voltages locally. is the diagonal matrix covering rated currents of every source. and are the Laplace transforms of and . From Figure 3:
where is the matrix for the voltage controller. By using , we obtain:
where is the matrix for the current controller. After substituting it in the observer transfer values from Equation (4) into Equation (12), we obtain:
In addition to (11), we can write the global form:
Here, is a transformation which can be expressed in the diagonal matrix:
The reference voltage vector for the small signal can be obtained by (1) and (13)–(15):
In parallel to all, the dynamic behavior of the voltage closed loop of any converter can be expressed as follows:
where the Laplace transforms for and are and is the th converter closed loop transfer function. The close loop transfer function expression is derived in [46] for the larger number of nodes. Global small signal behavior can be derived using (18):
where is the matrix for the transfer function of the converters. By replacing (19) in (17), we obtain:
By rearranging (5), we obtain:
All the delays are equal and periodic :
For a DC microgrid, it is a standard to take the load impedances and transmission lines are resistive [47]. Consequently, one will use the DC MG conductance matrix to express with current supplied to the voltage bus:
Substituting (23) into (22) derives the global dynamics of the presented controller in the DC microgrid, which will be expressed as:
Equation (24) indicates that the microgrid is a multi-input-multi-output (MIMO) plant, where outputs are and and inputs are and . The global dynamics in (26) derives the transfer functions using every input to the output . Suitable values for various gains are often found. Specified poles of the system lie in the left half of the plan and, therefore, the system is stable for a few bounded intervals of delay .
5. Case Study
A circular ring connected to a DC microgrid setup was simulated in MATLAB/Simulink. A total of 10 nodes were considered in a DC microgrid and every node consisted of a buck converter in parallel with resistive loads, as is shown in Figure 1 and Figure 5. The performance of the proposed algorithm for the detection of islanding was investigated for stability performance and load sharing of the system. Microgrid transmission impedance effect was considered in the simulation. A depiction of the system electrical network can be seen in Figure 5a. The two-way communication graphical connectivity is shown in Figure 5b, with bi-directional communication links and an assumed balanced Laplacian matrix. For the case study, system communication graph weights , which were stored in the adjacency matrix, were tightly linked to the observer’s outcome in Equation (25). Therefore, the Laplacian adjacency matrix becomes:
Similarly, the system stability was checked with the node disconnected, as in Figure 5b, and the Laplacian matrix becomes:
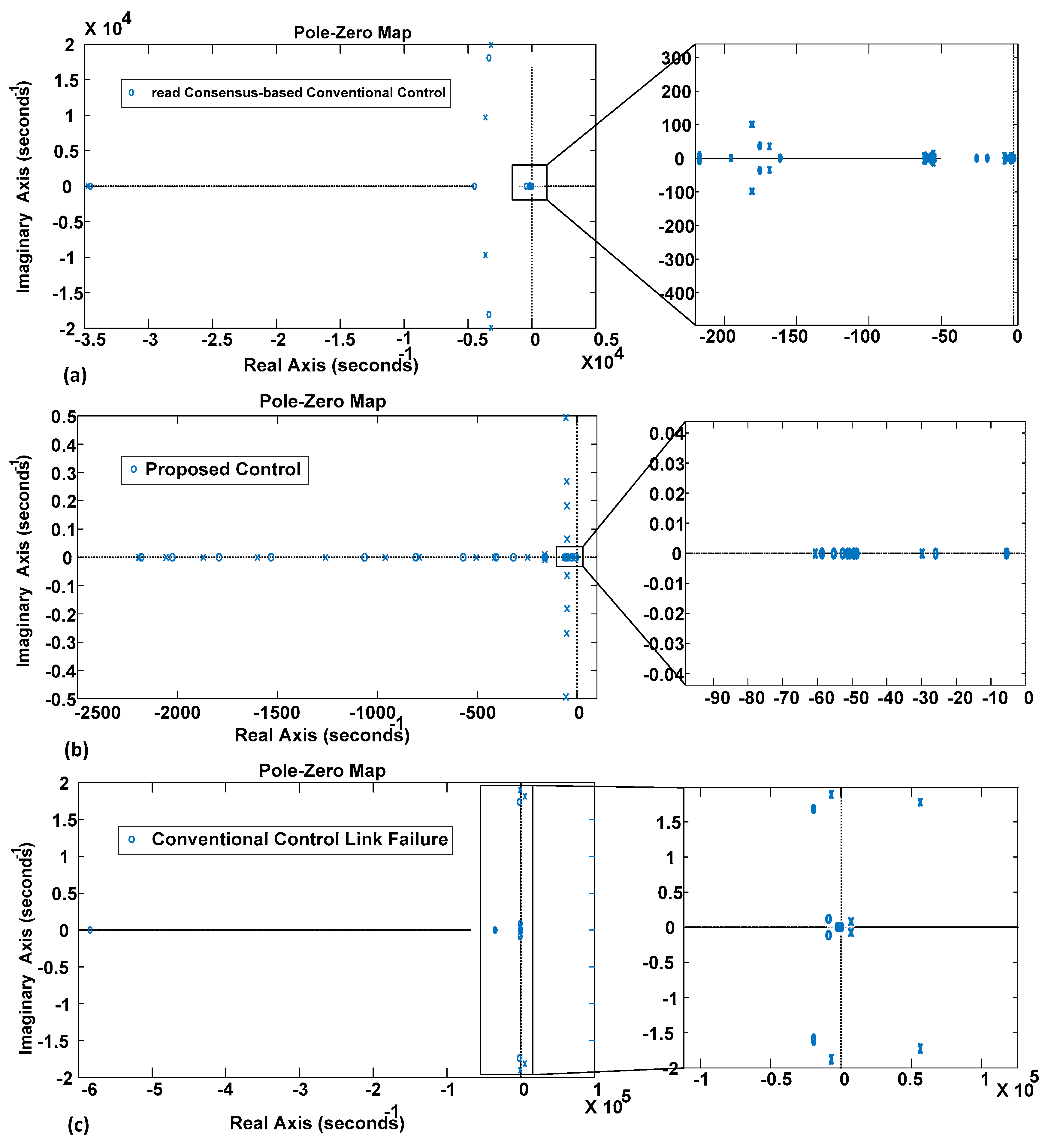
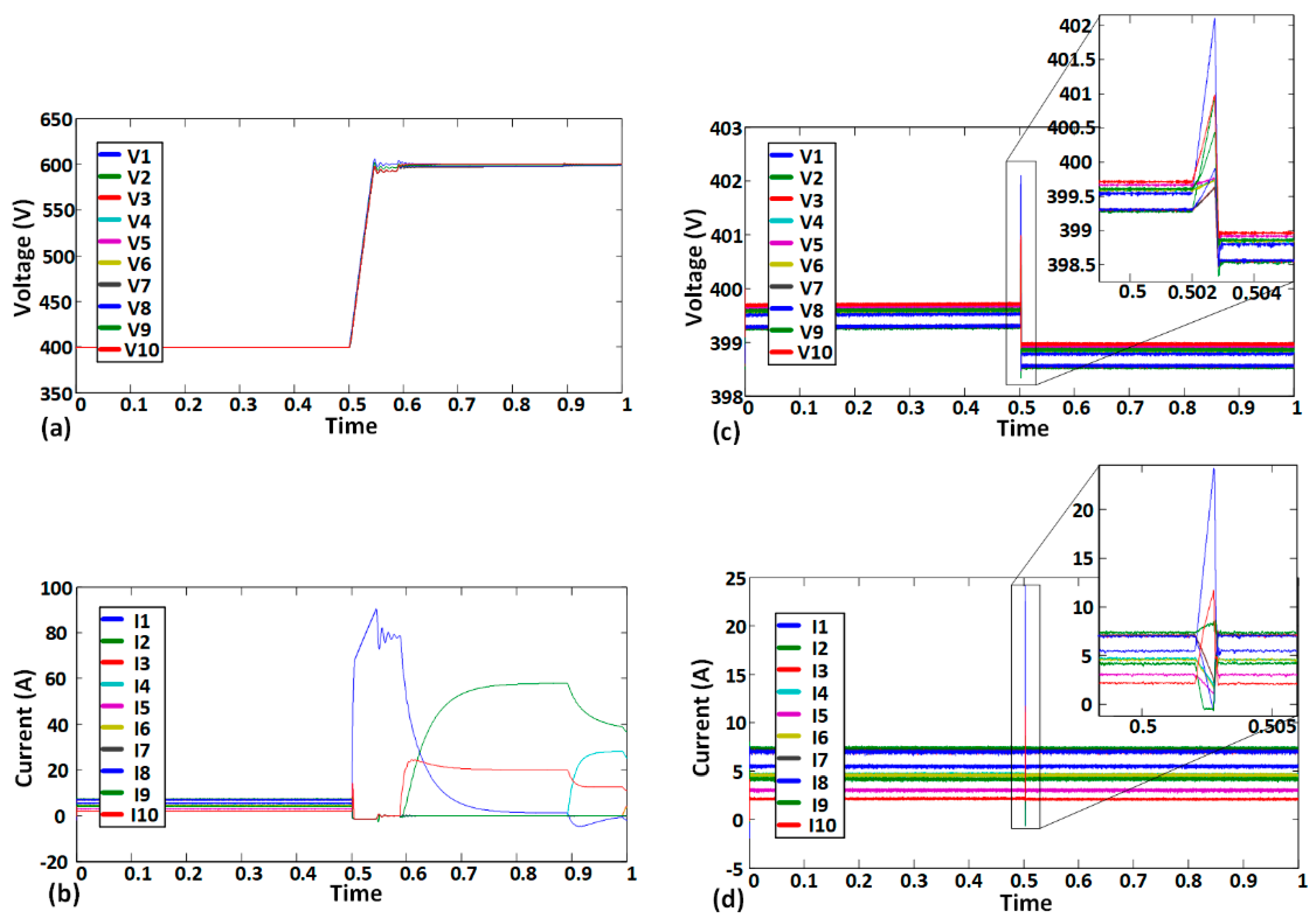
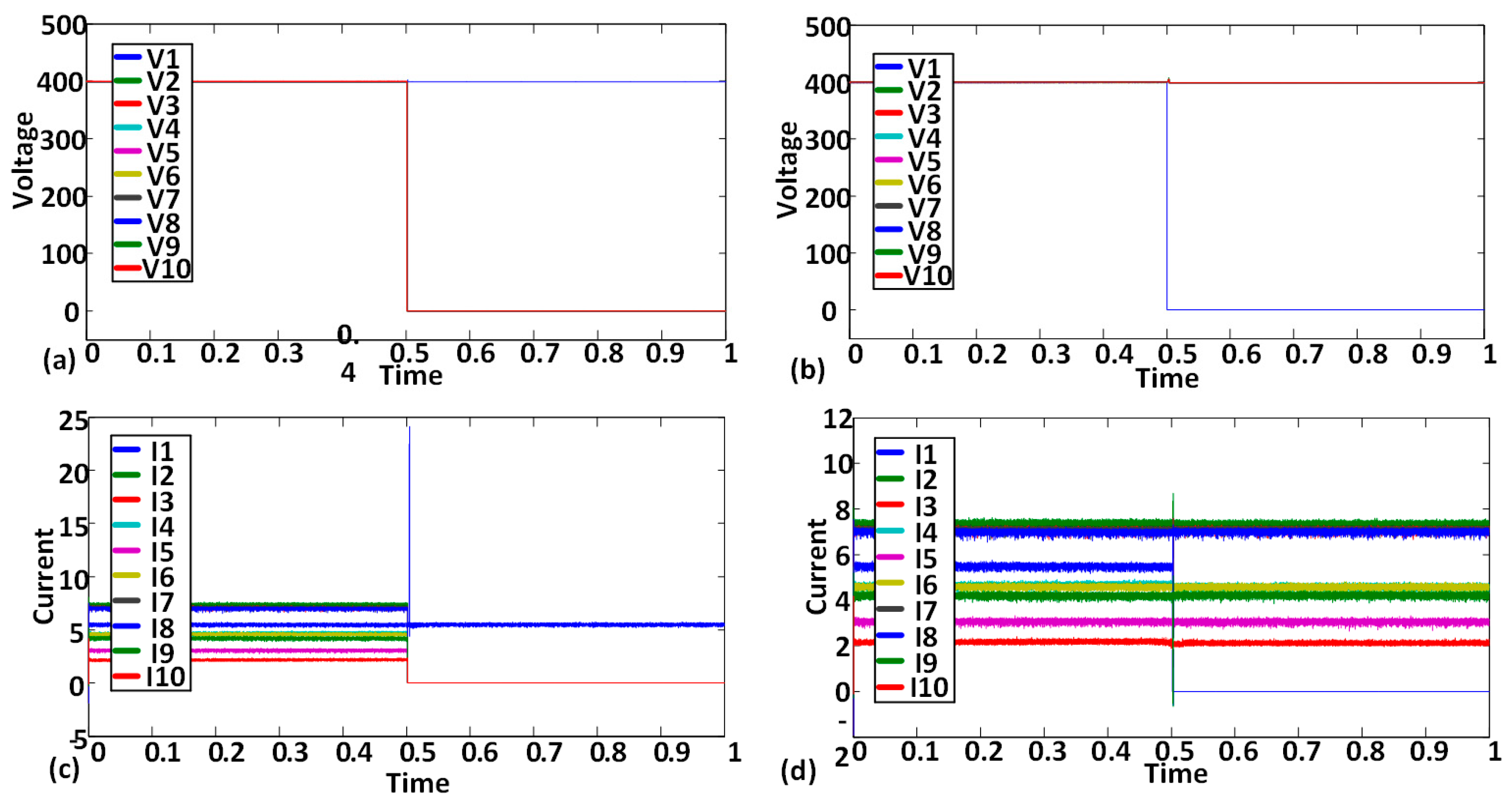
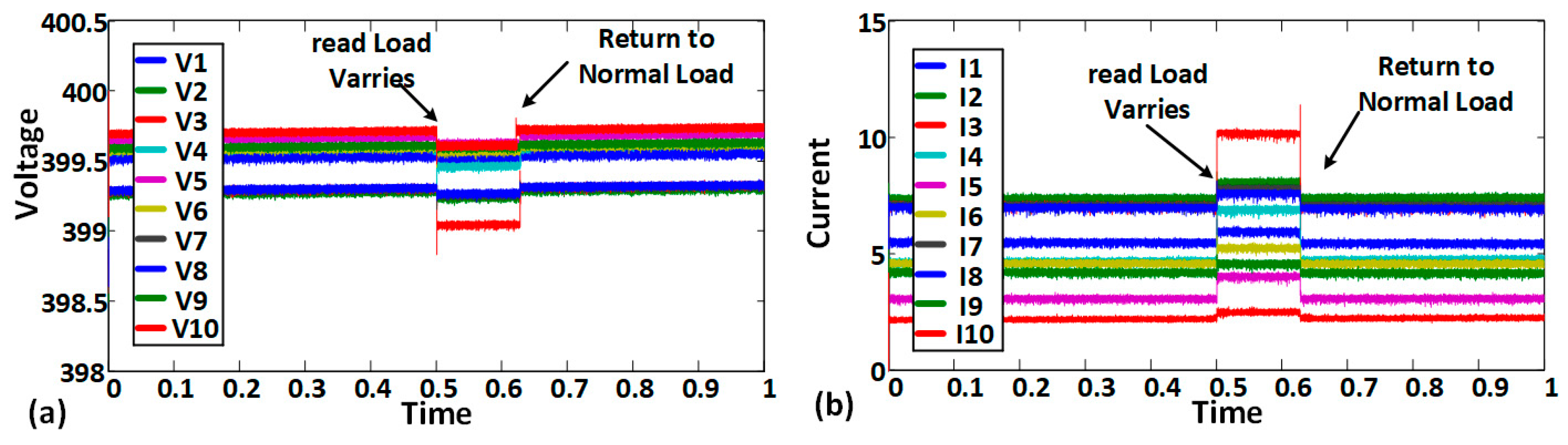
During regular operation, neighbors exchanged information, based on which look-up tables were maintained at each node that stored the values of all nodes. During regular connectivity operation, the stability of the system is also shown in Figure 6a. These look-up tables were used to detect link failures according to the received information from neighboring nodes, as is shown in Table 1. If a link failure occurred at any node, a priority signal was generated from this node and sent to its connected neighbor nodes. After receiving this priority signal, all nodes re-evaluated their look-up table for the connected graph, as in Figure 2b. In addition, the stability analysis during communication islanding was tested, as shown in Figure 6b,c, for the proposed and conventional systems. Two different scenarios were discussed: one was a fully connected graph, whereas the other was disconnected, as in Figure 5b. A fully connected communication graph exchanged values and worked as a conventional secondary control, whereas the disconnected node with a consensus-based network could lead to a cascaded failure; therefore, the proposed algorithm shifted the system to average droop, as proposed in the last section. Simulation results are presented to compare the system performance in the islanding case, using the proposed algorithm and conventional consensus, as is shown in Figure 6, Figure 7 and Figure 8, respectively. Node 1 was disconnected from the system, as in Figure 5b, which caused the consensus-based system to become unstable, whereas the proposed algorithm managed to stabilize the system, as in Figure 7c,d. The proposed system quickly responded and had a smaller peak after the link failure occurred. The proposed algorithm maintained a look-up table, which can be seen in Figure 8, for voltage and current values. Figure 8 values are also presented as a table in Table 1. The proposed algorithm system stability was also tested for the conventional and proposed systems, as is shown in Figure 6. The stability test showed that the conventional system became unstable during the formation of the communication island; after system reconfiguration using the proposed detection algorithm, the system worked suitably and within the stability range. The proposed algorithm in operation is shown using the flow chart in Figure 2b. The load variation was also tested in the system and performed well, as is shown in Figure 9. Detailed parameters of case studies are shown in Table 2. Comparison studies were also done and are shown in tabular form in Table 3.
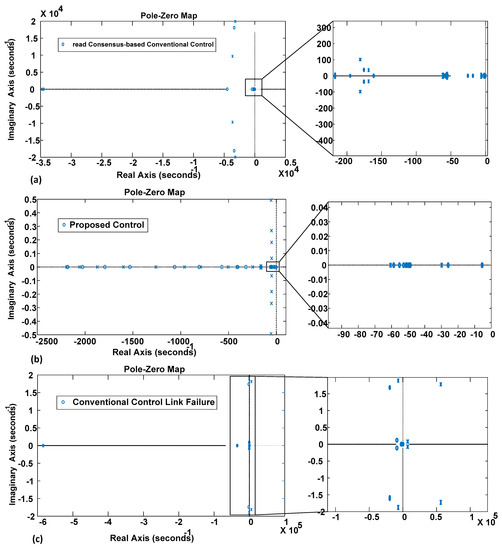
Figure 6.
Pole-zero stability plot: (a) consensus-based conventional control; (b) proposed control; (c) conventional control link failure.

Table 1.
Look-up table values for simulation results.
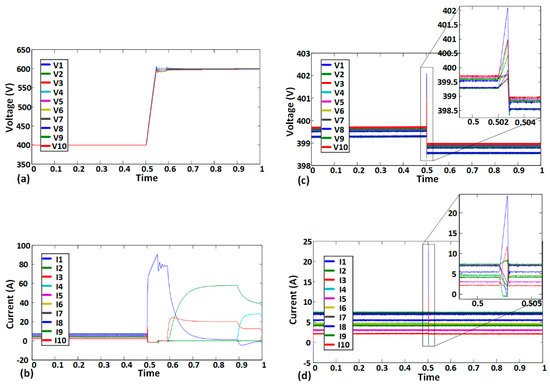
Figure 7.
Performance of the DC microgrid: (a) without algorithm node voltage (b) without algorithm node current; (c) proposed algorithm node voltage (d) proposed algorithm node current.
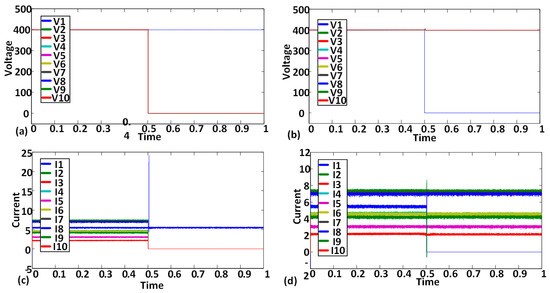
Figure 8.
Look-up table on nodes in the DC microgrid: (a) node 1 voltage; (b) connected nodes’ voltages; (c) node 1 current; (d) connected nodes’ current.
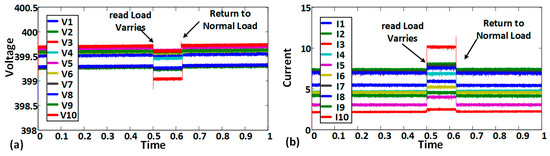
Figure 9.
Load variation on the DC microgrid: (a) node voltage; (b) node current.
Table 2.
Parameters for a single converter node in the DC microgrid.
Table 3.
Comparison of the proposed control with a conventional control.
6. Experimental Results
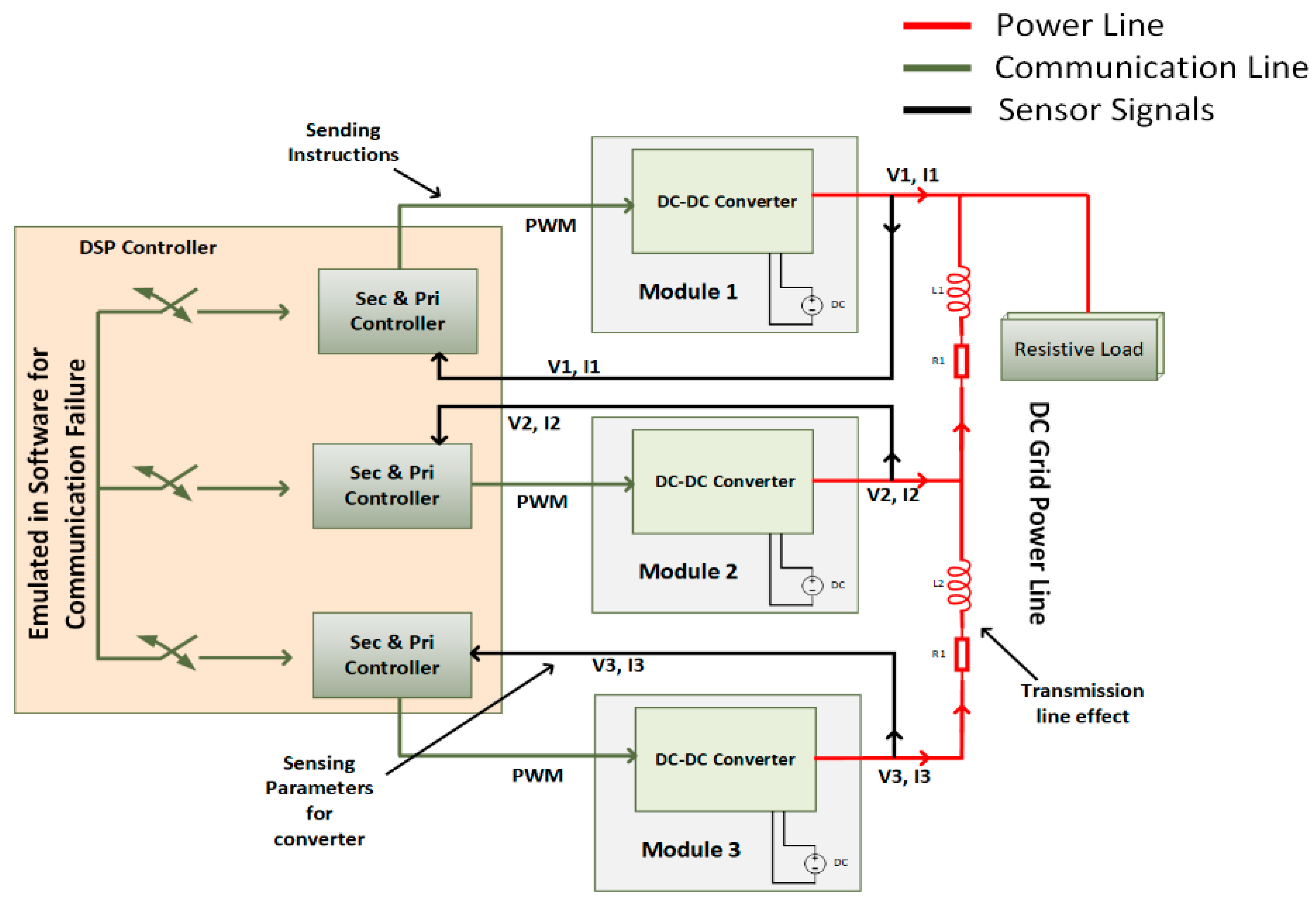
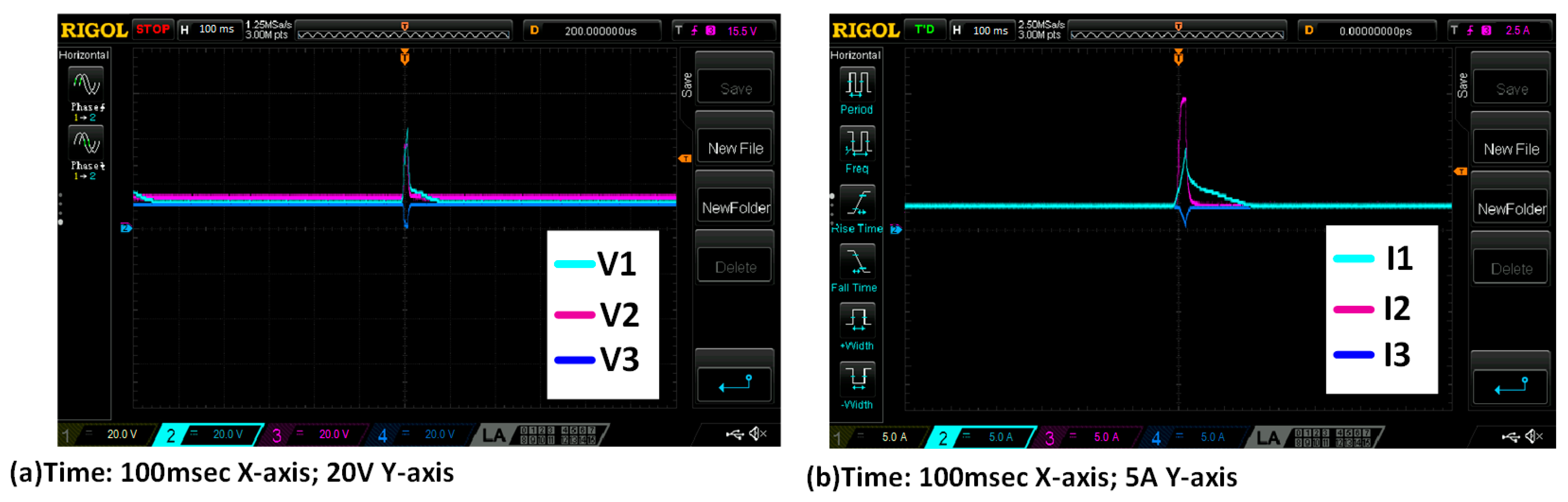
A low voltage laboratory setup consisting of a three-node system was implemented to verify and compare the experimental results with a simulation for the effectiveness of the proposed algorithm. It was used to detect for connectivity of the link failure and stabilization of the system during communication islanding. All the parameters of one single node are shown in Table 4 and its experimental schematic is shown in Figure 10. All system node parameters are taken as identical. As is shown in Figure 10, control was implemented using a DSP (Digital Signal Processor) controller and all the signals on converter output were sensed and fed to the DSP controller. These signals were then used to control the system using consensus-based control. Simultaneously, consensus-based control worked during the start of the DC MG operation, then the failure of two links was generated on module 3, using software emulation to form multiple communication islands. The formation of two communication islands was emulated resulting in a divergence of operating points. In that case, the proposed algorithm detected the different communication islands and it modified the control structure accordingly. A look-up table was used to detect the communication islanding and, after detection, the control structure was modified and the system shifted to average droop control. As in Figure 11a,b, the proposed algorithm responded quickly and had a smaller peak. The proposed system voltage peak took approximately 20 msec and the current peak took 40 msec to stabilize. The experimental results obtained were close to the simulation results in achieving stability and maintaining operation. Therefore, the proposed algorithm has been proven effective during the formation of multiple communication islands.
Table 4.
Parameters for a single converter in the DC microgrid.
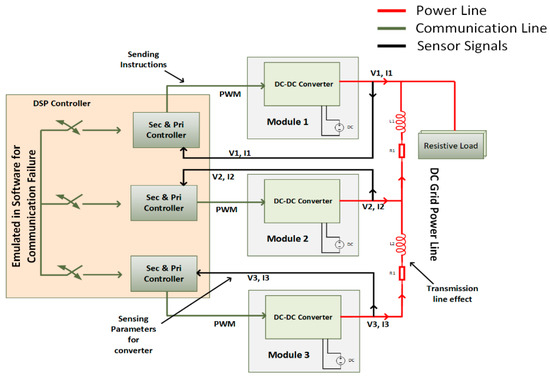
Figure 10.
Schematic for experimental setup.
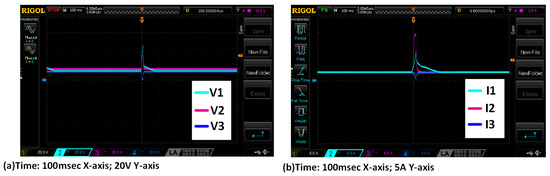
Figure 11.
Performance of the DC microgrid: (a) node voltage for proposed algorithm; (b) node current for proposed algorithm.
7. Conclusions
A communication islanding detection algorithm was proposed for a distributed secondary control that detected communication islanding using the information exchanged and stored it as a look-up table for the connected portion of the network graph. If any communication link failure occurred, a priority signal was generated from the disconnected node to its neighbors. Based on this information, all nodes re-evaluated the connected graph and updated the look-up tables accordingly. This study revealed that the proposed algorithm scheme was effective in detecting and controlling subsequently formed communication islands. The effectiveness of the proposed algorithm for detecting link failure and maintaining system stability was verified using a MATLAB simulation and experimental results. This algorithm can be extended to different control scenarios and applications including AC and hybrid microgrids.
Author Contributions
M.U.S. proposed the idea for writing the manuscript. M.M.K. and H.T. suggested the literature and supervised the writing of the manuscript. K.H. helped M.U.S. with writing and formatting. S.H. and M.A.M. helped with modifying the figures and shared the summary of various credible articles to be included in this manuscript. X.J. helped with system parameters to make the simulation test possible.
Funding
This research received no external funding
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lotfi, H.; Member, S.; Khodaei, A. AC Versus DC Microgrid Planning. IEEE Trans. Power Syst. 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Kan, N.H.; Kanjiya, P.; Zeineldin, H.H.; Xiao, W.; Kirtley, J.L.; Khadkikar, V. A Modified Control Topology to Improve Stability Margins in Micro-grids with Droop Controlled IBDG. In Proceedings of the 3rd Renewable Power Generation Conference (RPG 2014), Naples, Italy, 24–25 September 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Standards, I.; Committee, C.; Generation, D.; Storage, E. IEEE Guide for Design, Operation, and Integration of Distributed Resource Island Systems with Electric Power Systems; IEEE: Piscataway, NJ, USA, 2011; ISBN 9780738166889. [Google Scholar]
- Bunker, K.J.; Weaver, W.W. Multidimensional droop control for wind resources in dc microgrids. IET Gener. Transm. Distrib. 2017, 11, 657–664. [Google Scholar] [CrossRef]
- Behjati, H.; Davoudi, A.; Lewis, F. Modular DC-DC Converters on Graphs: Cooperative Control. IEEE Trans. Power Electron. 2014, 29, 6725–6741. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A comprehensive study of implemented international standards, technical challenges, impacts and prospects for electric vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Moayedi, S.; Davoudi, A. Distributed Tertiary Control of DC Microgrid Clusters. IEEE Trans. Power Electron. 2016, 31, 1717–1733. [Google Scholar] [CrossRef]
- Hossain, M.S.; Madlool, N.A.; Rahim, N.A.; Selvaraj, J.; Pandey, A.K.; Khan, A.F. Role of smart grid in renewable energy: An overview. Renew. Sustain. Energy Rev. 2016, 60, 1168–1184. [Google Scholar] [CrossRef]
- Wang, P.; Xiao, J.; Setyawan, L. Hierarchical Control of Hybrid Energy Storage System in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4915–4924. [Google Scholar] [CrossRef]
- Frances, A.; Asensi, R.; Garcia, O.; Prieto, R.; Uceda, J. Modeling Electronic Power Converters in Smart DC Microgrids—An Overview. IEEE Trans. Smart Grid 2018, 9, 6274–6287. [Google Scholar] [CrossRef]
- Takahashi, T.; Miyamoto, M.; Dousoky, G.M.; Shoyama, M. Droop control for bi-directional DC-DC converters used in multi-level virtual conductors. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 12–22 October 2015. [Google Scholar] [CrossRef]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An improved droop control method for dc microgrids based on low bandwidth communication with dc bus voltage restoration and enhanced current sharing accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar] [CrossRef]
- Nasirian, V.; Member, S.; Moayedi, S.; Member, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Lee, Z.; Zhu, S.; Zheng, J.; Choi, D.H.; Wei, L. Research on Dynamic Process of DC Micro-grid under Hierarchical Control. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; Volume 47, ISBN 9783902823625. [Google Scholar]
- Hu, T.; Khan, M.M.; Xu, K.; Zhou, L.; Rana, A. Design of an input-parallel output-parallel multi-module DC-DC converter using a ring communication structure. J. Power Electron. 2015, 15, 886–898. [Google Scholar] [CrossRef]
- Kang, W.; Li, Q.; Gao, M.; Li, X.; Wang, J.; Xu, R.; Chen, M. Distributed Secondary Control Method for Islanded Microgrids with Communication Constraints. IEEE Access 2018, 6, 5812–5821. [Google Scholar] [CrossRef]
- Tanyingyong, V.; Olsson, R.; Cho, J.; Hidell, M.; Sj, P. IoT-grid: IoT Communication for Smart DC Grids. In Proceedings of the Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Lewis, F.L.; Zhang, H.; Hengster-Movric, K.; Das, A. Cooperative Control of Multi-Agent Systems; Springer: London, UK, 2014; Volume 53, ISBN 978-1-4471-5573-7. [Google Scholar]
- Lewis, F.L.; Qu, Z.; Davoudi, A.; Bidram, A. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef]
- Oliveira, T.R.; Silva, W.W.; Donoso-Garcia, P.F. Distributed Secondary Level Control for Energy Storage Management in DC Microgrids. IEEE Trans. Smart Grid 2017, 8, 2597–2607. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar] [CrossRef]
- Hug, G.; Kar, S.; Wu, C. Consensus + innovations approach for distributed multiagent coordination in a microgrid. IEEE Trans. Smart Grid 2015, 6, 1893–1903. [Google Scholar] [CrossRef]
- Kumar, S.; Das, N.; Islam, S. Performance monitoring of a PMU in a microgrid environment based on IEC 61850-90-5. In Proceedings of the 2016 Australasian Universities Power Engineering Conference (AUPEC), Brisbane, Australia, 25–28 September 2016; pp. 1–5. [Google Scholar]
- Dou, C.; Yue, D.; Guerrero, J.M.; Xie, X.; Hu, S. Multiagent system-based distributed coordinated control for radial dc microgrid considering transmission time delays. IEEE Trans. Smart Grid 2016, 8, 2370–2381. [Google Scholar] [CrossRef]
- Hare, J.; Shi, X.; Gupta, S.; Bazzi, A. Fault diagnostics in smart micro-grids: A survey. Renew. Sustain. Energy Rev. 2016, 60, 1114–1124. [Google Scholar] [CrossRef]
- Mah, D.; Hills, P.; Li, V.O.K.; Richard, B. Smart grid applications and developments. In Green Energy and Technology; Springer: London, UK, 2014; ISBN 978-1-4471-6280-3. [Google Scholar]
- Konara, K.M.; Kolhe, M.L. Charging management of grid integrated battery for overcoming the intermittency of RE sources. In Proceedings of the IEEE International Conference on Information and Automation for Sustainability (ICIAfS), Galle, Sri Lanka, 16–19 Decmber 2016. [Google Scholar] [CrossRef]
- Kumar, S.; Das, N.; Islam, S. High performance communication redundancy in a digital substation based on IEC 62439-3 with a station bus configuration. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015; pp. 2–6. [Google Scholar]
- Shahid, M.U.; Khan, M.M.; Hashmi, K.; Habib, S.; Jiang, H.; Tang, H. A Control methodology for load sharing system restoration in islanded dc micro grid with faulty communication links. Electronics 2018, 7, 90. [Google Scholar] [CrossRef]
- Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics 2018, 7, 105. [Google Scholar] [CrossRef]
- Gibbons, A. Algoritmic Grpah Theory; Cambridge Univeristy Press: Cambridge, UK, 1985. [Google Scholar]
- Mesbahi, M.M.; Egerstedt, M. Graph Theoretic Method in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010; ISBN 9780691140612. [Google Scholar]
- Char, J.P. Circuit, cutset and path enumeration, and other applications of edge-numbering convention. In Proceedings of the Institution of Electrical Engineers; IET: Michael Faraday House, Stevenage, 1970; Volume 117. [Google Scholar]
- Char, J.P. Generation and realisation of loop and cutsets. In Proceedings of the Institution of Electrical Engineers; IET: Michael Faraday House, Stevenage, 2001; Volume 116. [Google Scholar]
- Habibi, D.; Phung, Q.V. Graph Theory for Survivability Design in Communication Networks. In new Frontiers in Graph Theory; Zhang, Y., Ed.; IntechOpen: London, UK, 2012; pp. 421–434. ISBN 9789535101154. [Google Scholar]
- Golub, G.H.; Van Loan, C.F.; Varga, R.S.; Götze, F.; Tikhomirov, A.; Pastur, L.; Shcherbina, M.; Nguyen, H.V.; Nguyen, V.; Shin, O.; et al. An Eigen-based Approach for Enhancing Matrix Inversion Approximation in Massive MIMO Systems. IEEE Trans. Veh. Technol. 2016, 9545, 5480–5484. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Vasquez, J.; Sanseverino, E.R.; Energia, D. Hierarchical Control with Virtual Resistance Optimization for Efficiency Enhancement and State- of-Charge Balancing in DC Microgrids. In Proceedings of the IEEE First International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015; pp. 1–6. [Google Scholar]
- Meng, L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Tertiary and Secondary Control Levels for Efficiency Optimization and System Damping in Droop Controlled DC-DC Converters. IEEE Trans. Smart Grid 2015, 6, 2615–2626. [Google Scholar] [CrossRef]
- Wang, P.; Lu, X.; Yang, X.; Wang, W.; Xu, D. An Improved Distributed Secondary Control Method for DC Microgrids with Enhanced Dynamic Current Sharing Performance. IEEE Trans. Power Electron. 2016, 31, 6658–6673. [Google Scholar] [CrossRef]
- Dc, P.; Converters, D.C.; Moayedi, S.; Member, S.; Nasirian, V.; Member, S.; Lewis, F.L.; Davoudi, A. Team-Oriented Load Sharing in Parallel DC–DC Converters. In IEEE Transactions on Industry Applications; IEEE: Piscataway, NJ, USA, 2015; Volume 51, pp. 479–490. [Google Scholar]
- Huang, C.; Weng, S.; Yue, D.; Deng, S.; Xie, J.; Ge, H. Distributed cooperative control of energy storage units in microgrid based on multi-agent consensus method. Electr. Power Syst. Res. 2017, 147, 213–223. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; AL-Sunni, F.M. Control and Optimization of Distributed Generation Systems; Springer: London, UK, 2015; ISBN 978-3-319-16909-5. [Google Scholar]
- Maksimovic, D.; Zane, R. Small-signal discrete-time modeling of digitally controlled PWM converters. IEEE Trans. Power Electron. 2007, 22, 2552–2556. [Google Scholar] [CrossRef]
- Mahery, H.M.; Torabzad, S.; Sabahi, M.; Babaei, E. Modeling and stability analysis of buck-boost DC-DC converter based on Z-transform. In Proceedings of the IEEE 5th India International Conference on Power Electronics (IICPE), Delhi, India, 6–8 December 2012. [Google Scholar] [CrossRef]
- Mohan, N.; Underland, T.; Robbins, W. Power Electronics Converters, Applications and Design; John Wiley & Sons: New York, NJ, USA, 1995. [Google Scholar]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids; Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).