RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. 3D-LANDMARC
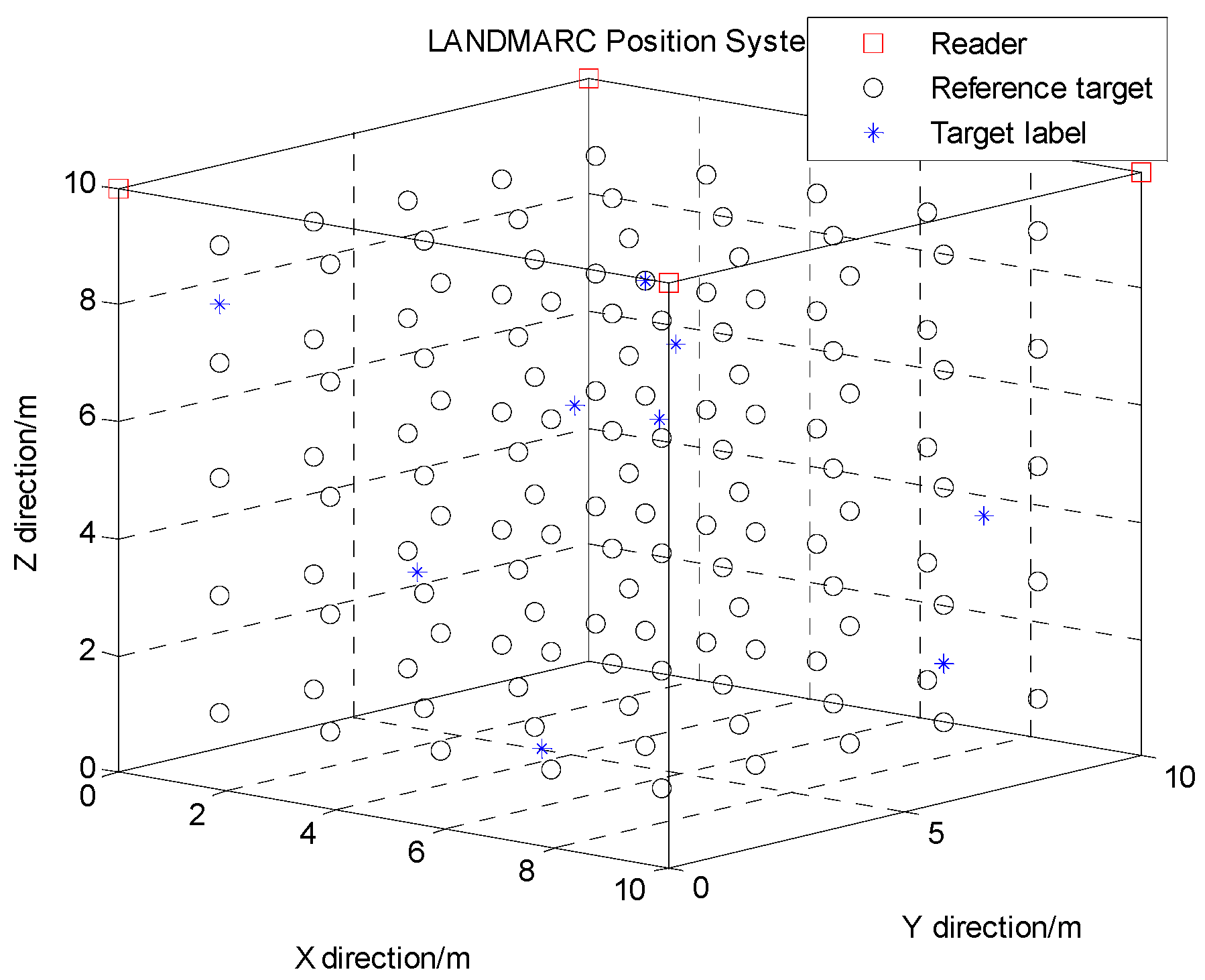
2.1. 3D-LANDMARC Localization Algorithm
- (1)
- Set the number of readers is k, the number of testing labels is P, the number of reference labels is M, and record the location of each reference label coordinates
- (2)
- Each reader collects the signal strength vectors of all of the reference tags respectively
- (3)
- Select a testing label to be measured, record the signal strength vector of the testing label from k readers.
- (4)
- The relative distances between the reference labels and the testing labels are expressed in Euclidean distancewhere DLij is the distance between the reference label i and the reader j, and DLj is the distance from the testing label to the reader j, which can be obtained from the relationship between the signal strength and the distance in the signal transmission model.
- (5)
- The m reference labels with the smallest Euclidean distance are selected as nearest neighbor reference labels.
- (6)
- The weight of each nearest-neighbor reference label is calculated
- (7)
- The coordinate of the testing label is estimated from the weights and the coordinates of the nearest reference labels.
- (8)
- Repeat (3)–(7) and then estimate all the coordinates of the testing labels.
2.2. Improved 3D-LANDMARC Localization Algorithm
2.2.1. Select the Neighboring Reference Labels
2.2.2. Testing Label Coordinate Problem Optimization
3. 3D-LANDMARC Optimization Goal Solution Based on QPSO
3.1. QPSO Algorithm
3.2. 3D-LANDMARC Optimization Goal Solution Based on QPSO
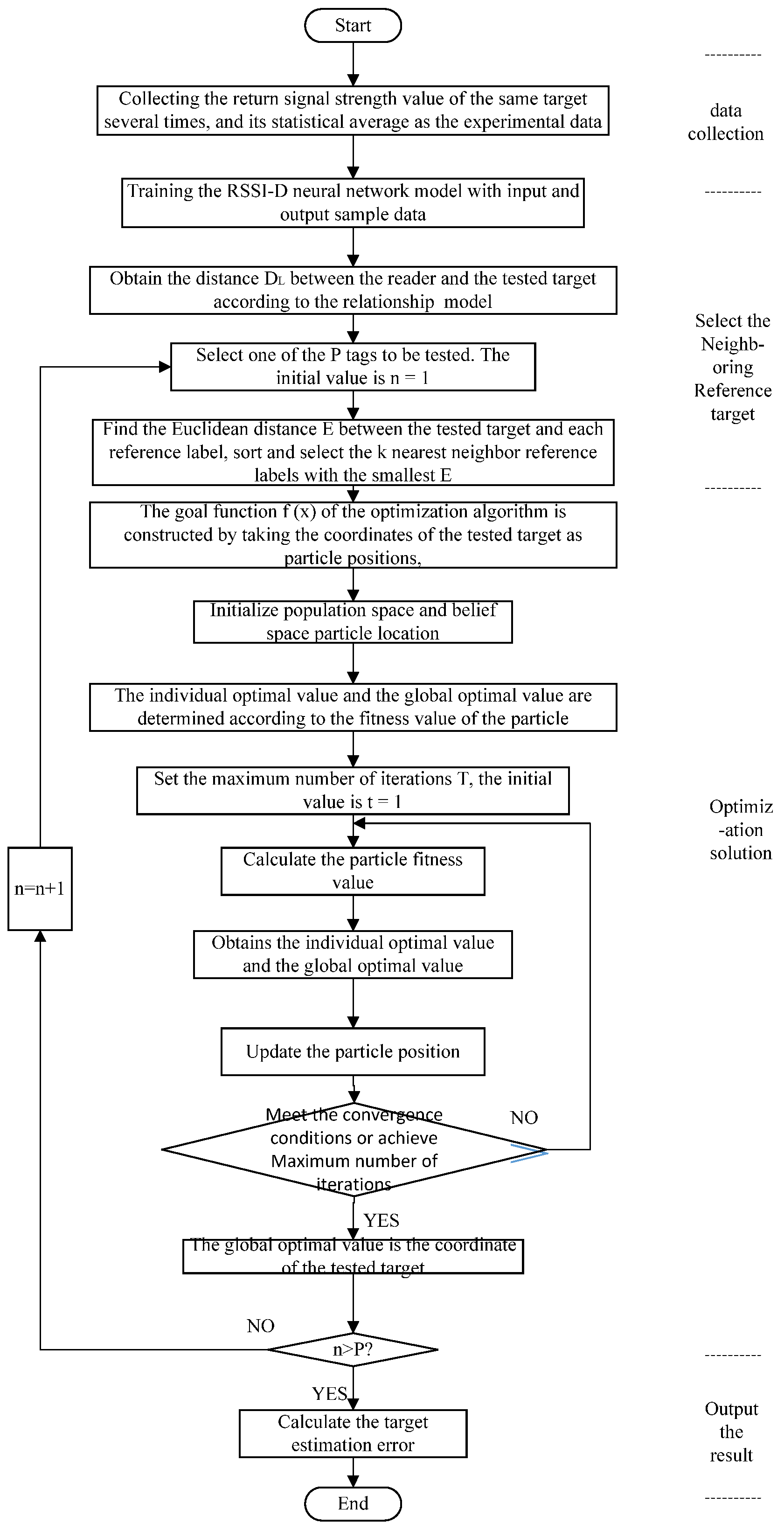
- (1)
- Data collection. The reader sends a signal of certain intensity, collects and records the return signal strength value from the label, collects several times consecutively, finds its statistical average as the final test data.
- (2)
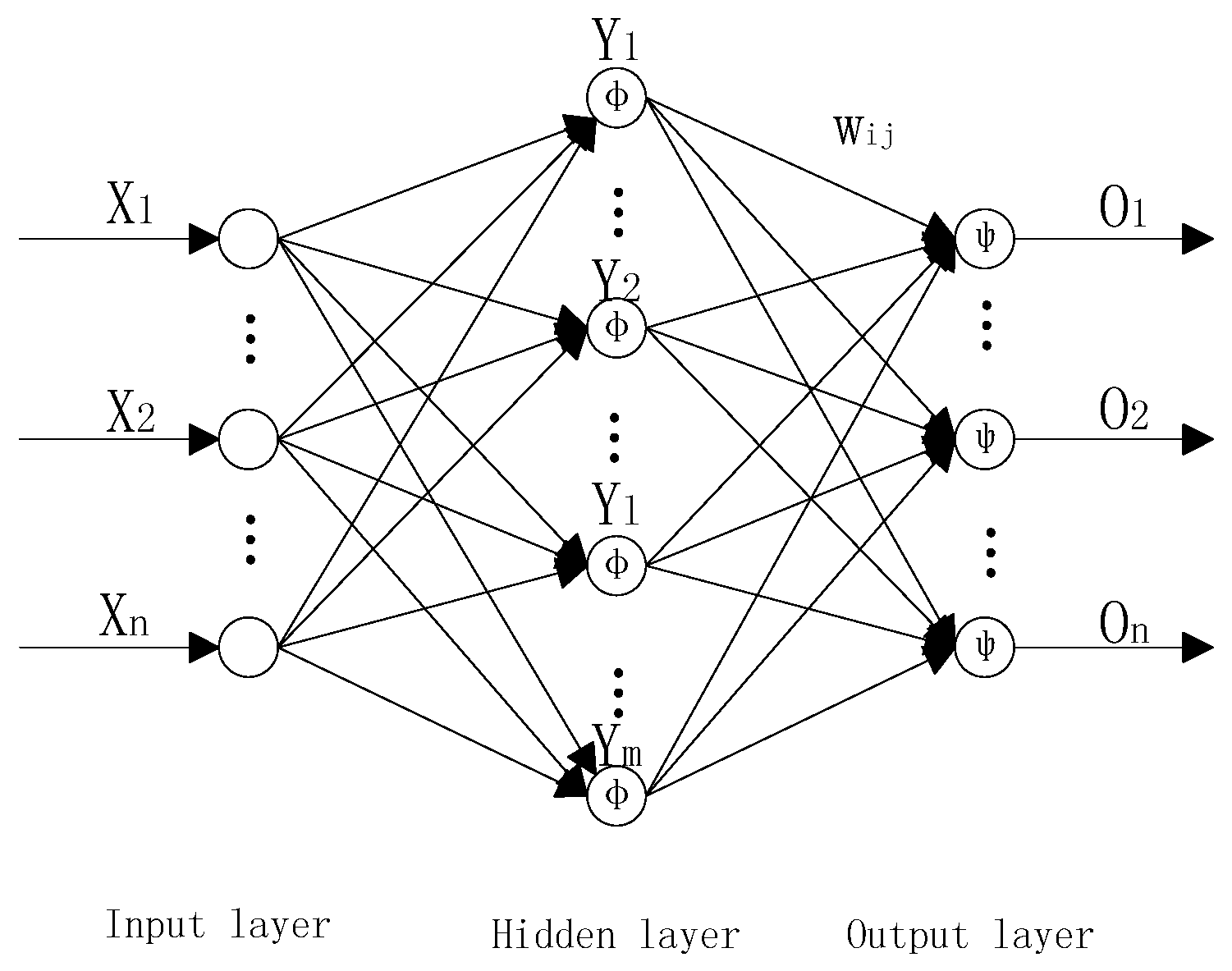
- Construction of signal transmission model. The distance between the reference tag and the reader is taken as the output sample data, and the nonlinear fitting relation model of the RSSI-D is obtained through the RBF neural network training, and the test data is taken as the input sample data. The distance between the tag and the reader is obtained by using the obtained relational model.
- (3)
- According to Equation (3), obtain the relative distance between the reference label and the testing label, and select four label whose distance are smaller as the adjacent reference label.
- (4)
- Substituting the coordinates of the adjacent reference label and the distance between the testing label and the adjacent reference label into Equation (7) to construct the objective function equation.
- (5)
- We use the quantum particle swarm algorithm to get the optimal solution of the objective function, it is thought of as the final estimated position of the label to be located.
4. Experimental Simulation Analysis
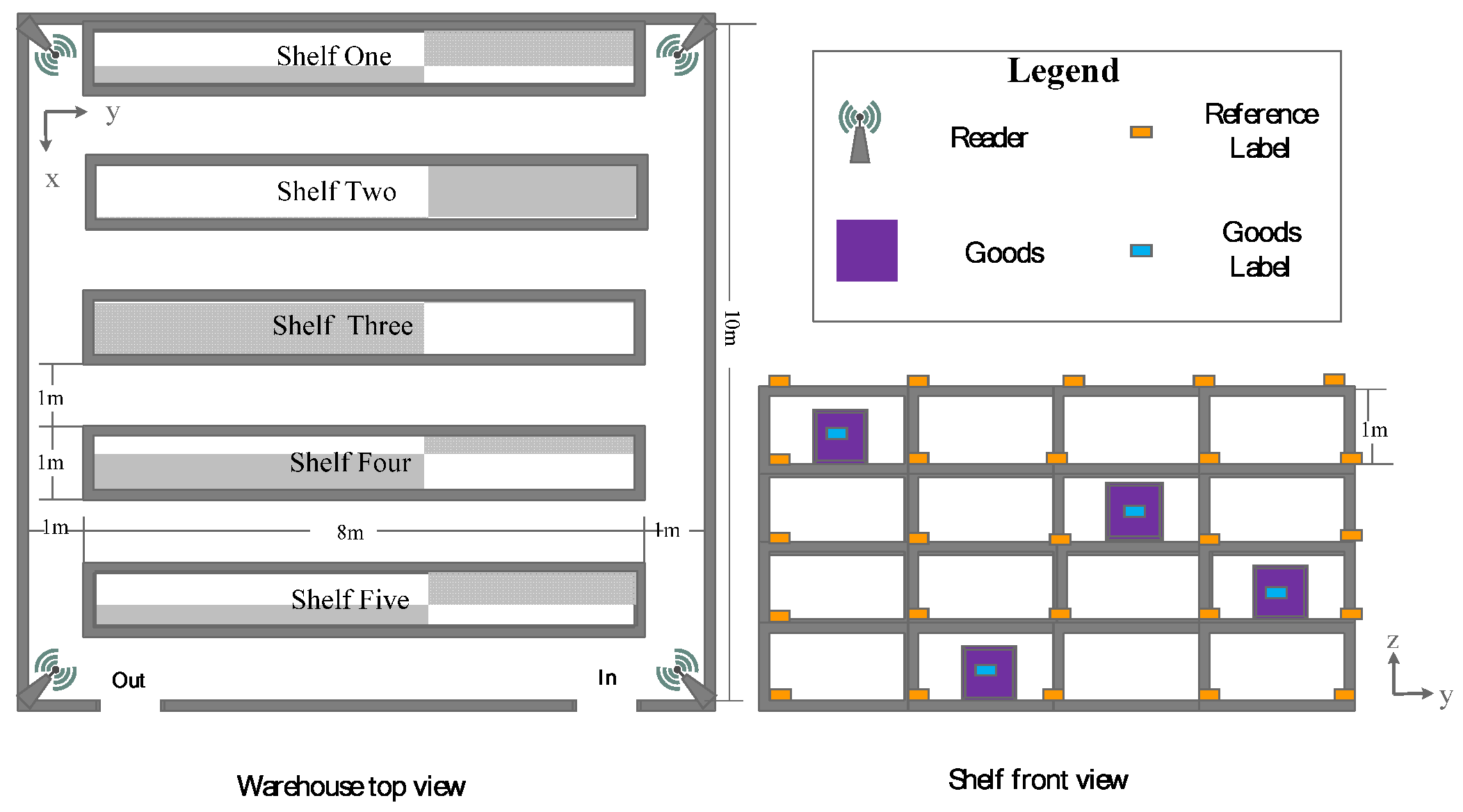
4.1. RFID Three-Dimensional Localization Examples
4.2. Localization Process and Results Analysis
4.2.1. Localization Algorithm Experiment Setup
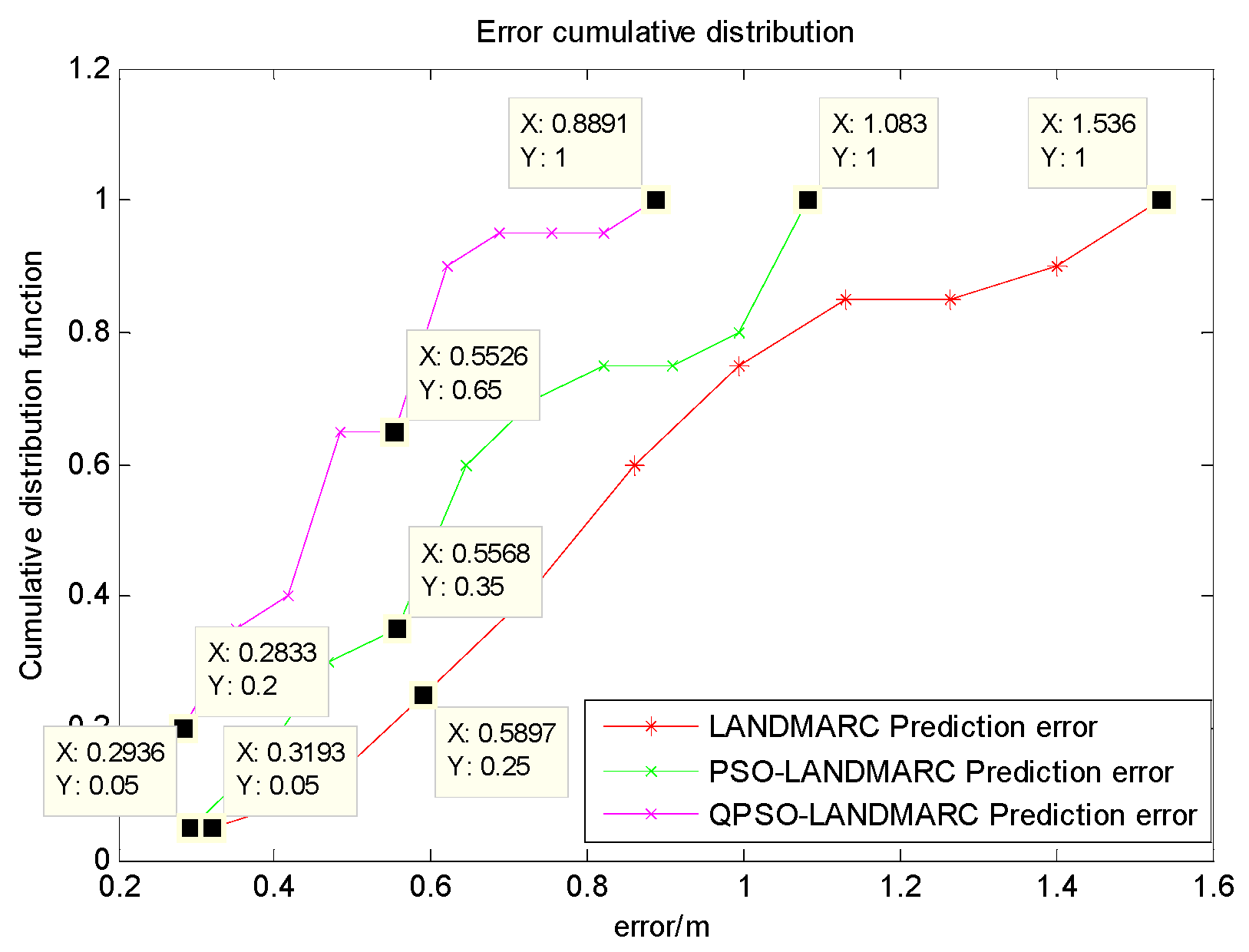
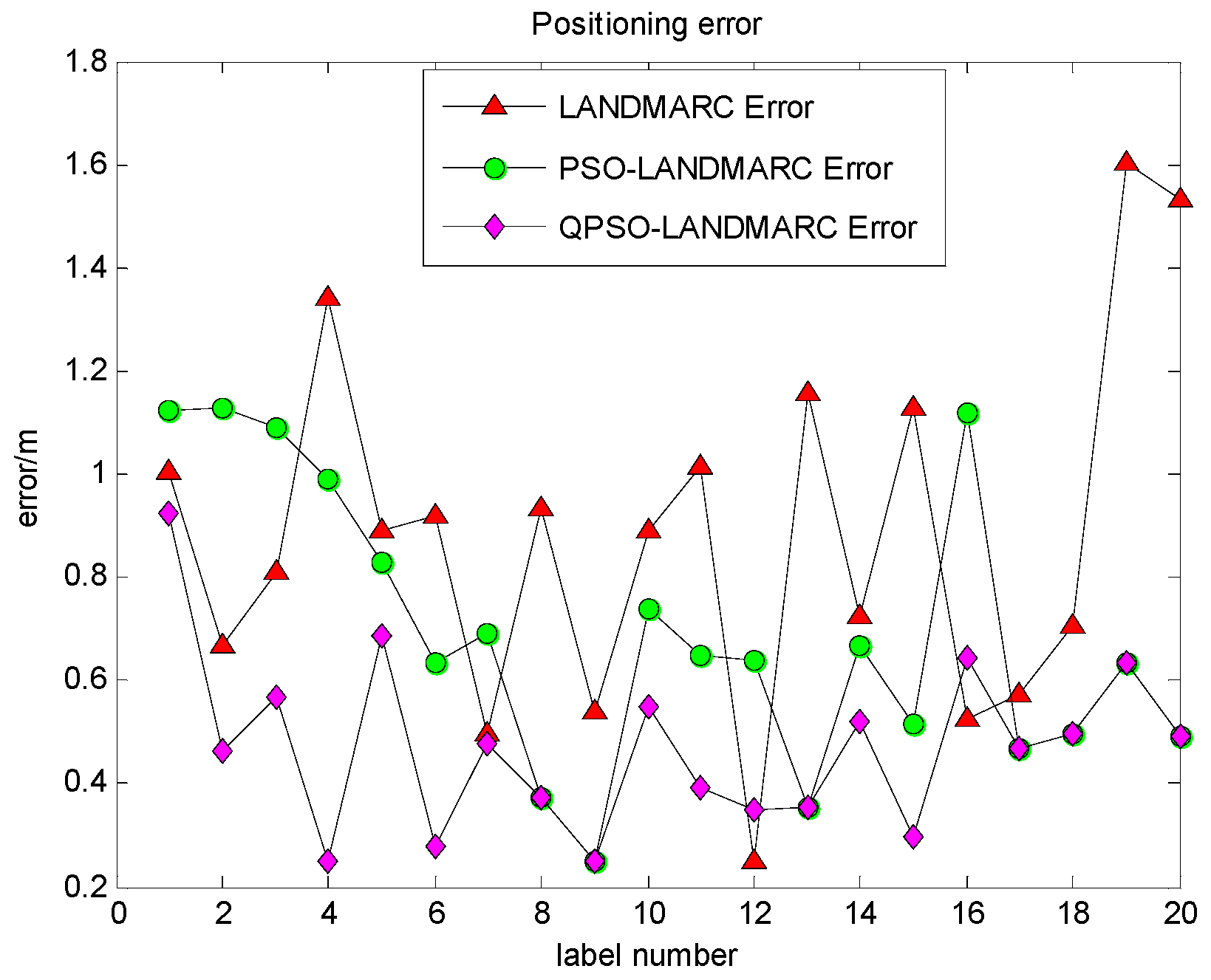
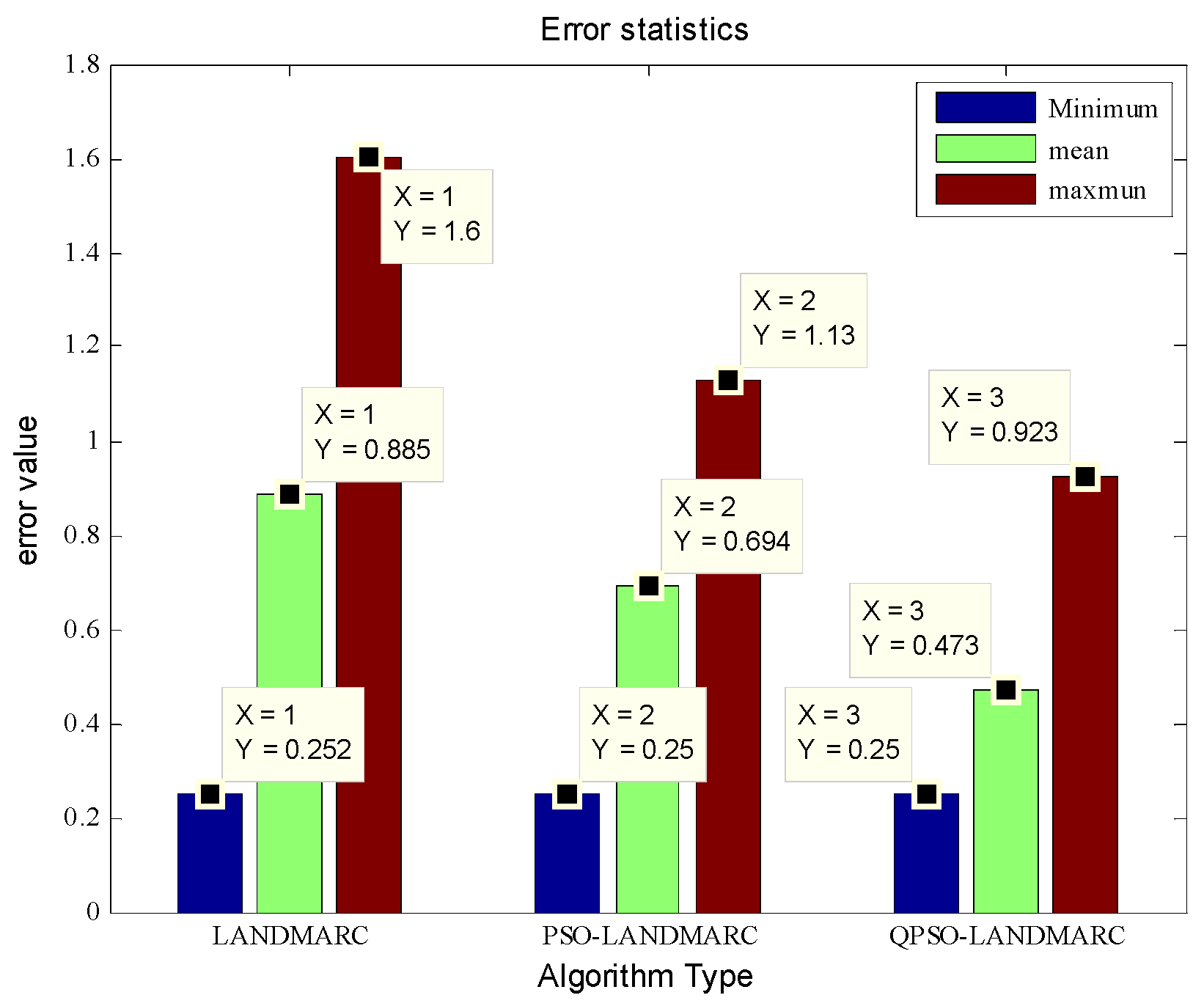
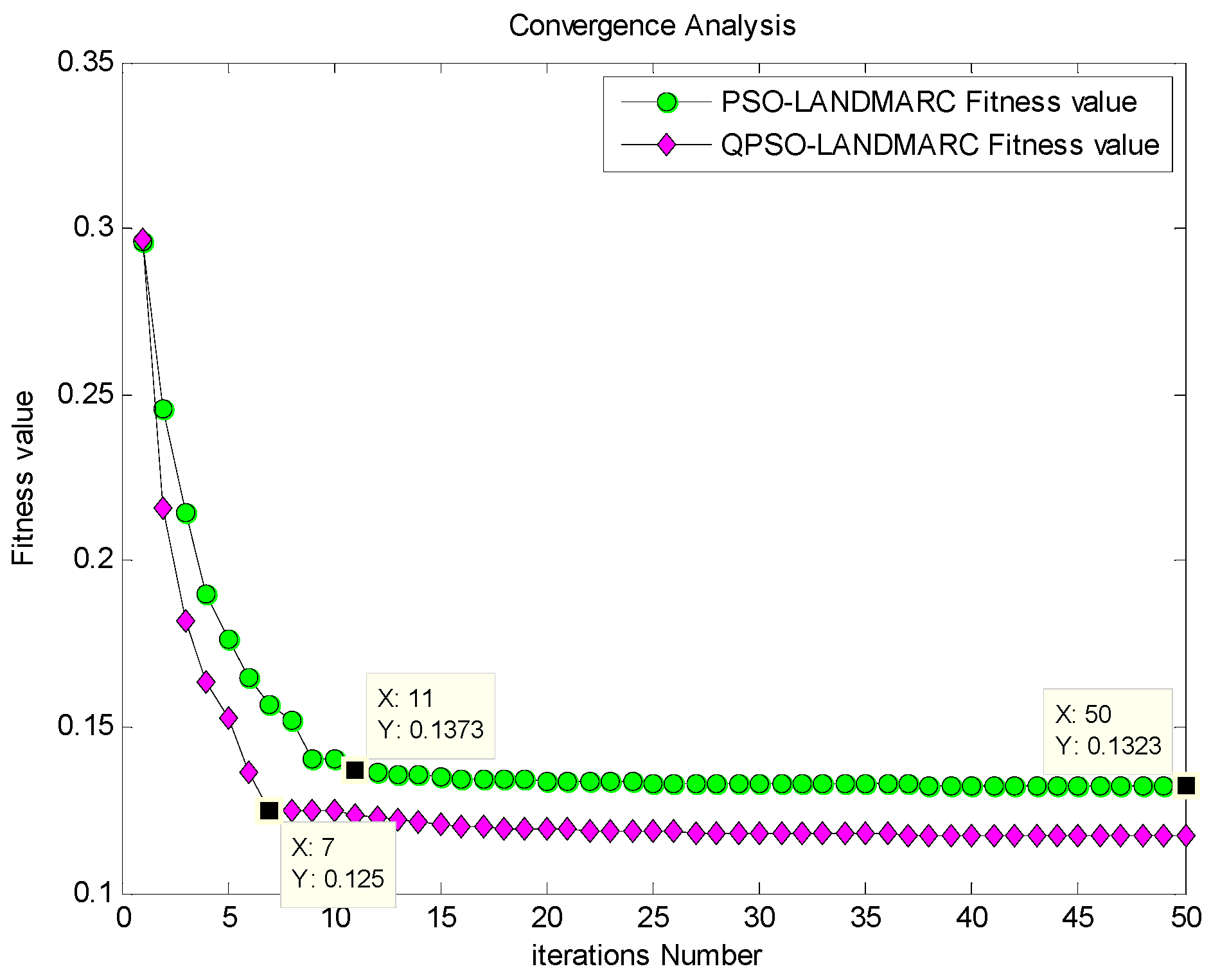
4.2.2. Experiment Content
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhao, Y.; Liu, K.; Ma, Y.; Gao, Z.; Zang, Y.; Teng, J. Similarity Analysis based Indoor Localization Algorithm with Backscatter Information of Passive UHF RFID Tags. IEEE Sens. J. 2016, 1, 99–106. [Google Scholar] [CrossRef]
- Hasani, M.; Talvitie, J.; Sydänheimo, L.; Lohan, E.; Ukkonen, L. Hybrid WLAN-RFID Indoor Localization Solution Utilizing Textile Tag. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1358–1361. [Google Scholar] [CrossRef]
- Chowdhury, T.J.S.; Elkin, C.; Devabhaktuni, V.; Rawat, D.B.; Oluoch, J. Advances on localization techniques for wireless sensor networks: A survey. Comput. Netw. 2016, 110, 284–305. [Google Scholar] [CrossRef]
- Zhou, B.; Chen, Q.; Xiao, P. The Error Propagation Analysis of the Received Signal Strength-based Simultaneous Localization and Tracking in Wireless Sensor Networks. IEEE Trans. Inf. Theory 2017, 63, 3983–4007. [Google Scholar] [CrossRef]
- Berkvens, R.; Peremans, H.; Weyn, M. Conditional Entropy and Location Error in Indoor Localization Using Probabilistic Wi-Fi Fingerprinting. Sensors 2016, 16, 1636. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Chen, Y.; Han, Y.; Lai, H.; Zhang, F.; Liu, K.J.R. Achieving Centimeter-Accuracy Indoor Localization on WiFi Platforms: A Multi-Antenna Approach. IEEE Internet Things J. 2017, 4, 122–134. [Google Scholar] [CrossRef]
- Athalye, A.; Savic, V.; Bolic, M.; Djuric, P.M. Novel Semi-Passive RFID System for Indoor Localization. IEEE Sens. J. 2013, 13, 528–537. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Z.; Saakian, V.; Qin, X.; Chen, Q.; Zheng, L. Item-Level Indoor Localization With Passive UHF RFID Based on Tag Interaction Analysis. IEEE Trans. Ind. Electron. 2013, 61, 2122–2135. [Google Scholar] [CrossRef]
- Yang, P.; Wu, W.; Moniri, M.; Chibelushi, C.C. Efficient Object Localization Using Sparsely Distributed Passive RFID Tags. IEEE Trans. Ind. Electron. 2013, 60, 5914–5924. [Google Scholar] [CrossRef]
- Pomarico-Franquiz, J.J.; Shmaliy, Y.S. Accurate Self-Localization in RFID Tag Information Grids Using FIR Filtering. IEEE Trans. Ind. Inform. 2014, 2014, 1317–1326. [Google Scholar] [CrossRef]
- He, J.; Geng, Y.; Liu, F.; Xu, C. CC-KF: Enhanced TOA Performance in Multipath and NLOS Indoor Extreme Environment. IEEE Sens. J. 2014, 14, 3766–3774. [Google Scholar]
- Zhou, Y.; Law, C.L.; Guan, Y.L.; Chin, F. Indoor Elliptical Localization Based on Asynchronous UWB Range Measurement. IEEE Trans. Instrum. Meas. 2011, 60, 248–257. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Collings, I.B.; Humphrey, D. TDOA-Based Localization for Semi-Static Targets in NLOS Environments. IEEE Wirel. Commun. Lett. 2015, 4, 513–516. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Rui, D. 3-D Target Localization in Wireless Sensor Networks Using RSS and AoA Measurements. IEEE Trans. Veh. Technol. 2017, 66, 3197–3210. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, L.; Liu, K.; Wang, J. Iterative Phase Reconstruction and Weighted Localization Algorithm for Indoor RFID-Based Localization in NLOS Environment. IEEE Sens. J. 2014, 14, 597–611. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Y.; Zhao, Y.; Liu, K. A Multipath Mitigation Localization Algorithm Based on MDS for Passive UHF RFID. IEEE Commun. Lett. 2015, 19, 1652–1655. [Google Scholar] [CrossRef]
- Wang, Q.; Balasingham, I.; Zhang, M.; Huang, X. Improving RSS-Based Ranging in LOS-NLOS Scenario Using GMMs. IEEE Commun. Lett. 2011, 15, 1065–1067. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, S.; Wang, G.; Li, Y. Robust Second-Order Cone Relaxation for TW-TOA-Based Localization With Clock Imperfection. IEEE Signal Process. Lett. 2016, 23, 1047–1051. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C.L. Performance of time-difference-of-arrival ultra wideband indoor localisation. IET Sci. Meas. Technol. 2011, 5, 46–53. [Google Scholar] [CrossRef]
- Digiampaolo, E.; Martinelli, F. Mobile Robot Localization Using the Phase of Passive UHF RFID Signals. IEEE Trans. Ind. Electron. 2014, 61, 365–376. [Google Scholar] [CrossRef]
- Liu, X.Y.; Aeron, S.; Aggarwal, V.; Wang, X.; Wu, M. Adaptive Sampling of RF fingerprints for Fine-grained Indoor Localization. IEEE Trans. Mob. Comput. 2015, 15, 2411–2423. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Xu, Y.; Zhuang, Y.; Gu, J.J. An Improved 3D Localization Algorithm for the Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2014, 98, 2567. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.A.; Antiwal, V.K. Location Estimation Technique using extended 3-D LANDMARC Algorithm for Passive RFID Tag. In Proceedings of the 2009 IEEE International Advance Computing Conference, Patiala, India, 6–7 March 2009. [Google Scholar]
- He, X.; Ye, D.; Peng, L.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar]
- Li, J.; Zhang, S.; Yang, L.; Fu, X.; Ming, Z.; Feng, G. Accurate RFID localization algorithm with particle swarm optimization based on reference tags. J. Intell. Fuzzy Syst. 2016, 31, 2697–2706. [Google Scholar] [CrossRef]
- Stella, M.; Russo, M.; Šarić, M. RBF network design for indoor positioning based on WLAN and GSM. Int. J. Circuits Syst. Signal Process. 2014, 8, 116–122. [Google Scholar]
- Wen, P.Z.; Su, T.T.; Li, L.F. RFID Indoor Localization Algorithm Based on PSO. Appl. Mech. Mater. 2013, 241, 972–975. [Google Scholar] [CrossRef]
- Monica, S.; Ferrari, G. A swarm-based approach to real-time 3D indoor localization: Experimental performance analysis. Appl. Soft Comput. 2016, 43, 489–497. [Google Scholar] [CrossRef]
- Yao, J.J.; Yang, J.; Li, J.; Wang, L.M.; Han, Y. Target Position Measurement Technology Based on Quantum-Behaved Particle Swarm Optimization. Appl. Mech. Mater. 2013, 5, 403–406. [Google Scholar] [CrossRef]








© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Deng, F.; Chen, Z. RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization. Electronics 2018, 7, 19. https://doi.org/10.3390/electronics7020019
Wu X, Deng F, Chen Z. RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization. Electronics. 2018; 7(2):19. https://doi.org/10.3390/electronics7020019
Chicago/Turabian StyleWu, Xiang, Fangming Deng, and Zhongbin Chen. 2018. "RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization" Electronics 7, no. 2: 19. https://doi.org/10.3390/electronics7020019
APA StyleWu, X., Deng, F., & Chen, Z. (2018). RFID 3D-LANDMARC Localization Algorithm Based on Quantum Particle Swarm Optimization. Electronics, 7(2), 19. https://doi.org/10.3390/electronics7020019