1. Introduction
Recently, measurement and control technology using image information has begun to be used to improve the reliability of image information processing in various industrial fields. It has been greatly improved as a result of the development of various image processing techniques and systems, such as area classification using the pixel-based method [
1], pixel detection method in micro areas [
2], and object detection with image texturing in the image [
3]. The cases mentioned show that different kinds of technologies are used as solutions in the industrial field.
In the semiconductor manufacturing field, wafer bonding is an important process. It has 7 unit-process steps, as follows: particle removal, surface chemistry modification, vacuum pumping, wafer alignment, room temperature joining, heating and/or forcing, and wafer thinning. Many kinds of wafer alignment systems use Charge Coupled Device (CCD) sensors to detect the flat surface and/or notch [
4] in the wafer and plate, respectively, in the bonding process. The system can measure the amount of change in the detected edge and align the wafer and plate. Conventionally, wafer alignment is performed based on the flat surface of the wafer and the notch of the ceramic plate. A method using an alignment mark on the wafer surface [
5] and automatic position correction method based on rigid body transformation was applied in a dicing machine [
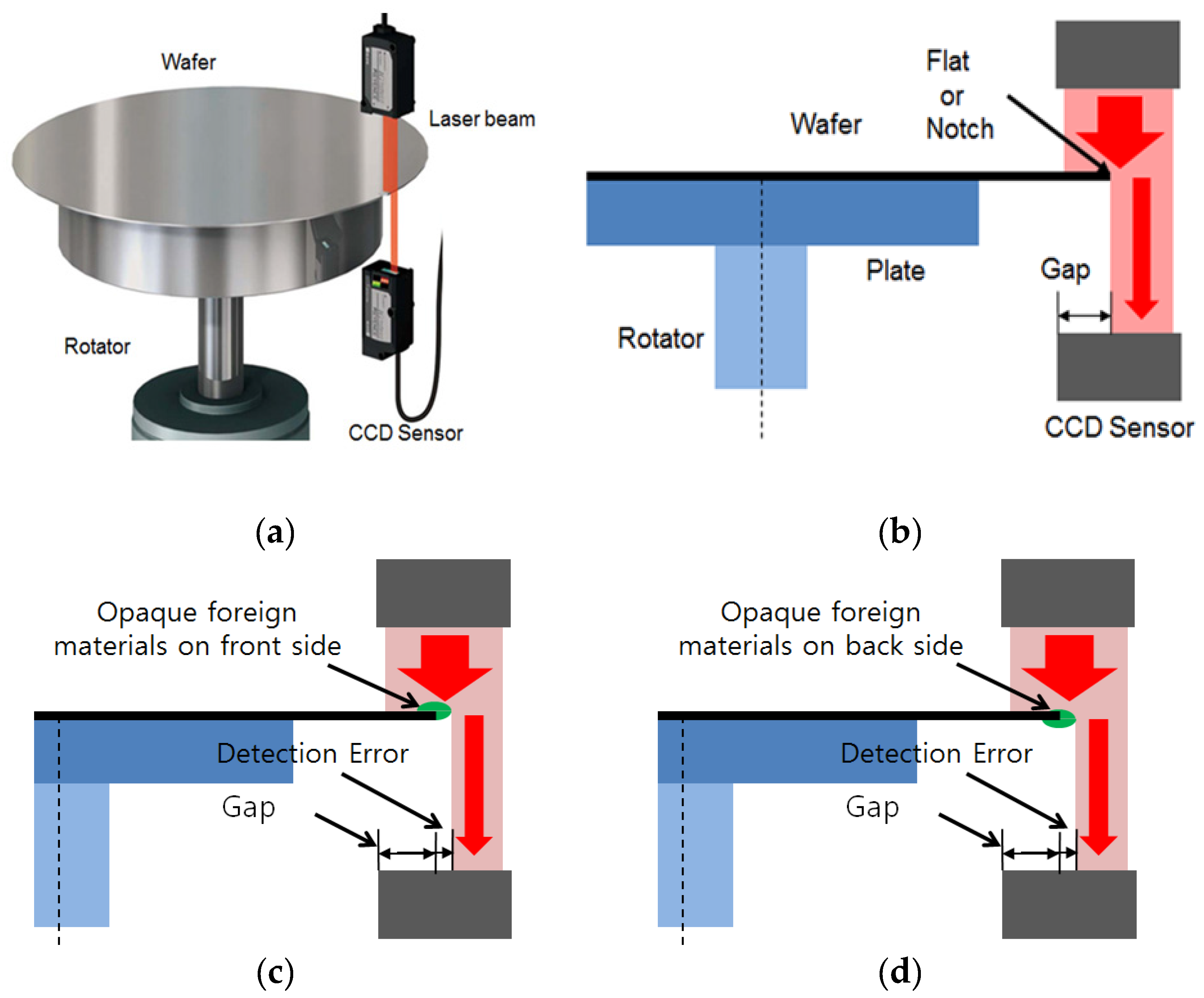
6], and has been widely applied in the correcting position detection of wafers. In this method, position correction is performed using a CCD sensor with a high-resolution, a low-density laser beam, as shown in
Figure 1a. In this case, the high-resolution, low-density laser is used to avoid physical damage to the target wafer surface caused by the laser contact type measuring method. As part of wafer polishing process in semiconductor manufacturing, the sapphire wafer requires an excellent surface flatness, so UV tape is attached to the wafer to protect the surface.
In order to make micro-circuit patterns on the wafer, the wafer should be aligned with the plate. For the alignment, the wafer or the ceramic plate should be rotated 360° to detect the edge and calculate the position value of the flat or notch according to the gap size obtained from the CCD sensor. The CCD sensor is fixed to the outer position of the wafer, as shown in
Figure 1b. At this point, if any opaque foreign materials are attached on the measuring position in flat or notch (front and/or back side), such as a particle, the CCD sensor may not detect the position value clearly. So, the particle removal process step is located as the first step in the wafer bonding process. Due to the interference of UV tape, the conventional method cannot be applied to the sapphire wafer process. The operator can make the mistake of putting the wafer upside down. For this reason, the vision aligner in which the newly proposed vision method is applied has the function of preventing equipment malfunction due to operator error in the mass production field.
2. Vision System and Method
2.1. Wafer Alignment Method
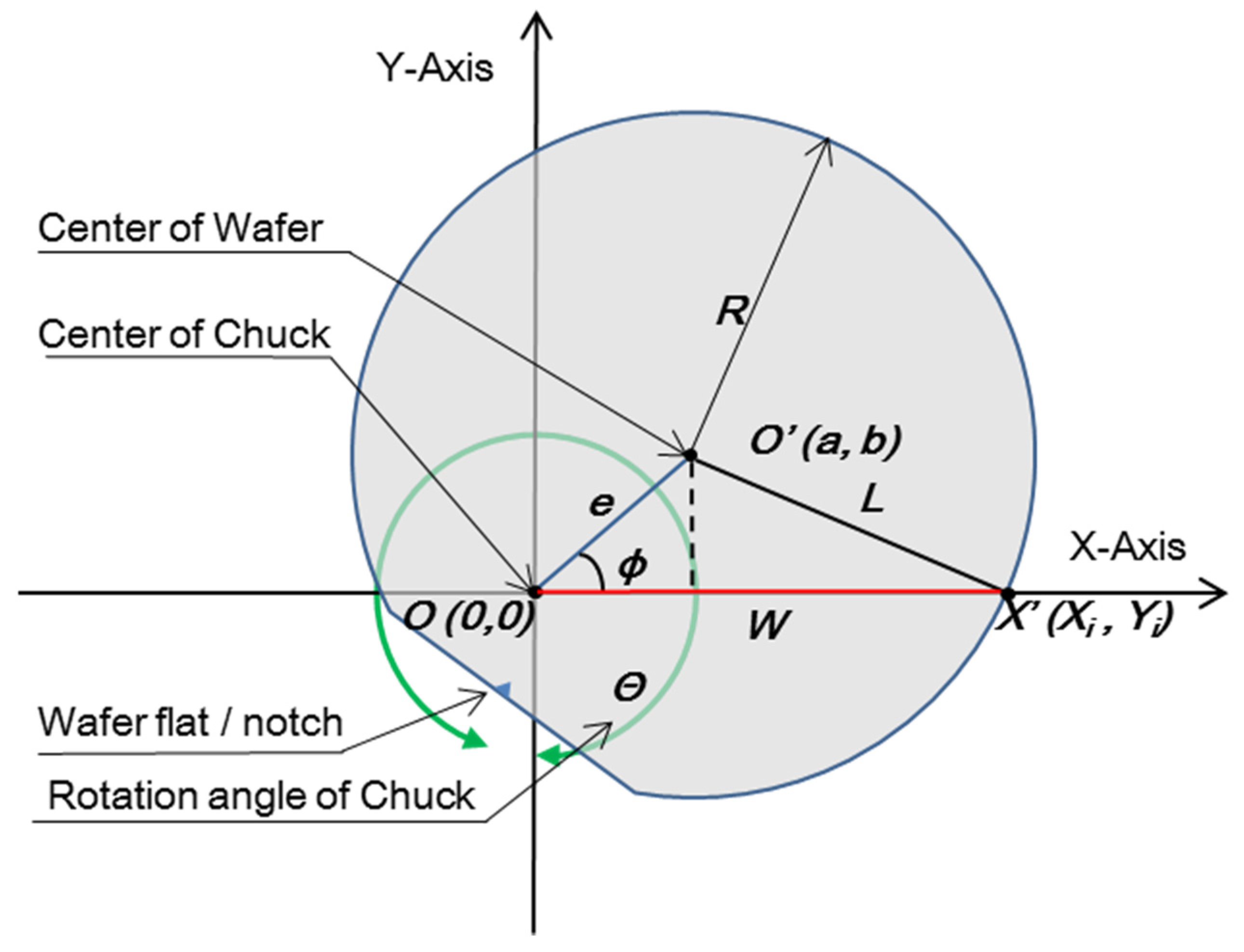
The alignment of the mechanical movement process consists of two steps. The first step is position matching with a plate and wafer, and the second step is detection of flat and notch of wafer and plate. In the alignment steps, the mechanical drivers are controlled by the offset-distance compensation methodology as shown in
Figure 2 [
7].
- −
e: The distance between center of wafer (O’) and the center of chuck in aligner (O)
- −
L: The distance between center of wafer and X’
- −
ϕ: The angle between center of wafer and the center of chuck in aligner
- −
θ: The rotation angle of alignment
- −
R: The radius of the wafer
- −
W: The distance between O and X’
For the pre-alignment, the center position of the aligner (
O) should be overlapped with the real center position of the wafer (
O’), but between the two positions have an error distance (
e). In order to find the distance (
e) and angle (
ϕ) with
R, the controller of the aligner needs the correction position value, which should be calculated by the relation formula from the form of trigonometric function [
8],
In that case, the value of
X’ (
Xi, Yi) in polar coordinates should be converted to the value of rectangular coordinates by the Equations (2) and (3).
Moreover, in order to overlap the position
O with
O’, the
W should be calculated by the equation using three parameters
a,
b and
R. Using Equation (3), the position value of
O’ (
a, b) can be calculated by a calculator, such as a processor with the known parameter
R, and then the mechanical movement controller will align with the wafer origin, approaching in phases as shown in
Figure 3. After the pre-alignment, the wafer should be rotated by the rotation chuck with the mechanical limitations of flat and notch using a detection method with the CCD sensor [
9]. After the wafer alignment, the mechanical aligner has to rotate for completion of alignment by re-check.
2.2. Implementation of the Vision Aligner Using the Method
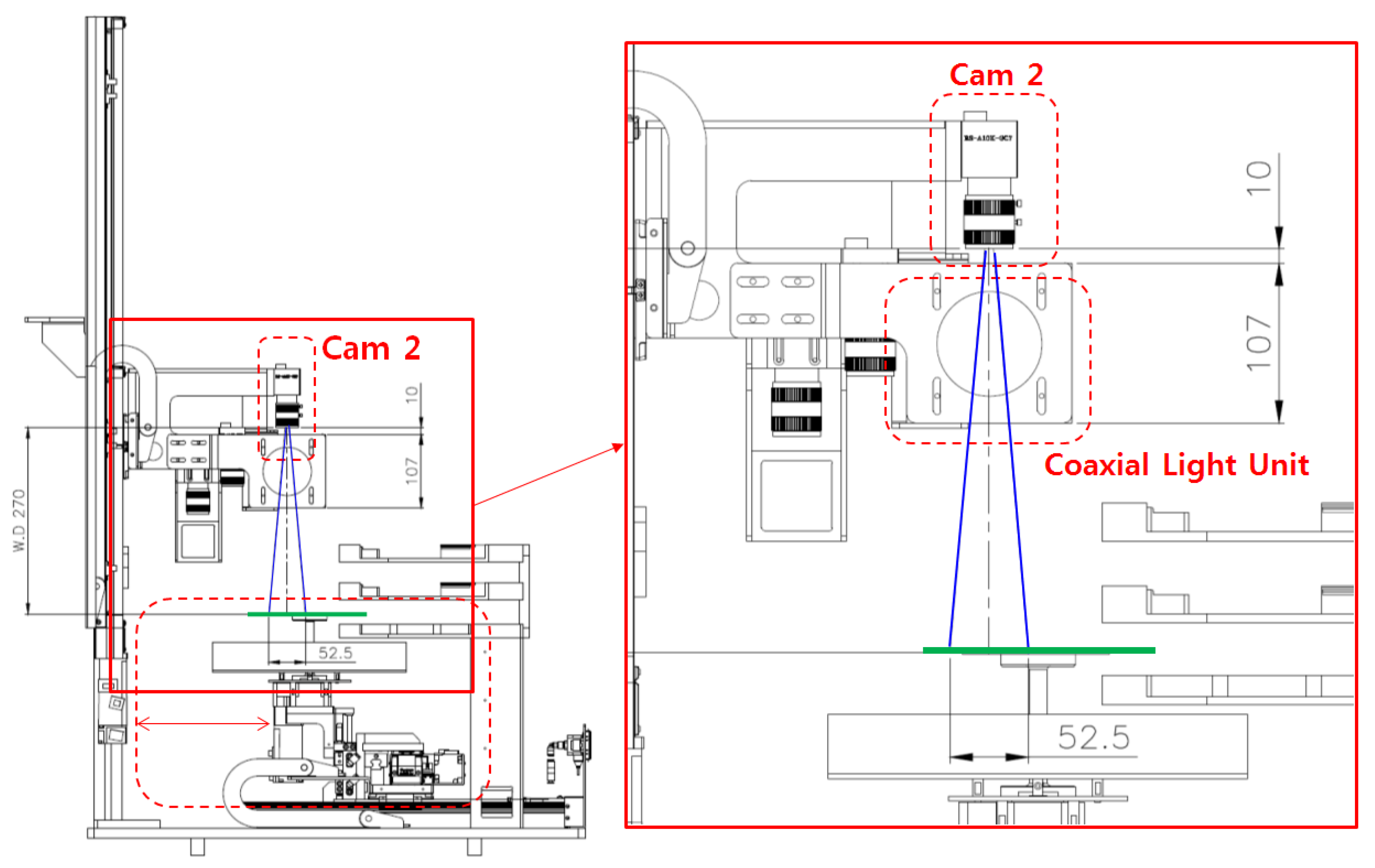
In this research, the vision aligner consists of a vision system and aligner, as shown in
Figure 4. The vision system has three vision-cameras, and the vision area covers the target wafer size, and the pixel position values are a known parameter. The vision camera consists of a pixel array (one pixel has a unit size of real length), so the counting number of pixels can be converted to a real length with unit value based directly on the real position from the captured image. The vision system is aimed at position correction in the sapphire wafer and ceramic plate bonding process with attached UV tape. In addition, wafer flip detection has been added to prevent misapplication of wafers by workers in the manufacturing process.
The vision aligner is designed to replace the wafer aligner using the conventional method in the manufacturing of micro light emitting diodes (LEDs). Sapphire wafers are suitable materials for LED fabrication, and are used at sizes of 2, 4 and 6 inches, and there are many substrate arrays for producing LEDs on wafers. In order to make one LED chip, one substrate is necessary. The maximum size of the substrate is 0.8 mm, and the allowable array angle error range is 0.1°, including mechanical movement error and error in the vision system. Thus, there is a limitation in that the operation accuracy range is less than ±0.8 mm and ±0.1° for the centering and rotational errors, respectively.
The vision system has three cameras, which are mounted on a movement rail. Camera No. 1 (Cam 1) (10M Mono, RS-A5001-10GM, Vicosys, Kwangmyung city, Republic of Korea) performs rotation and translation correction of the wafer, camera No. 2 (Cam 2) (5M Color, RS-A5001-5CM, Vicosys, Kwangmyung city, Republic of Korea) detects whether the wafer turns upside down or not, and camera No. 3 (Cam 3) (5M Mono, RS-A5001-5GM, Vicosys, Kwangmyung city, Republic of Korea) detects if the UV tape is normally attached to the wafer surface or not. The resolution of each camera was 94 μm/pixel. Cam 1 and 2 are used for white-ring-type back-light, which has a lighting dimmer, and the white coaxial light is for the Cam 3, with a 90° reflection mirror. Applying the vision method to the sapphire wafer bonding process, the working distance is 690 mm between Cam 1 and the wafer, as shown in
Figure 4. It is possible to use a maximum wafer size of 10 inches, and this can be decided based on the required image quality, wafer size, and the depth of focus (DOF) of the applied camera.
In order to detect the wafer inversion, Cam 2 checks the mask pattern on the wafer surface, which is carved on both sides of wafer. The mask pattern is a special characteristic. When white light is applied to the mask pattern as shown in
Figure 5, a white color mask pattern appears on the back side of the wafer, and a yellow color mask patterns appears on the front side. The color value comparison is the most effective way to recognize whether the wafer is turned over in vision processing or not. In order to detect UV tape on the wafer surface, a 90° reflection mirror is installed in front of the camera to acquire an image of the wafer’s flank, as shown in
Figure 6.
2.3. Operation of the Vision Aligner
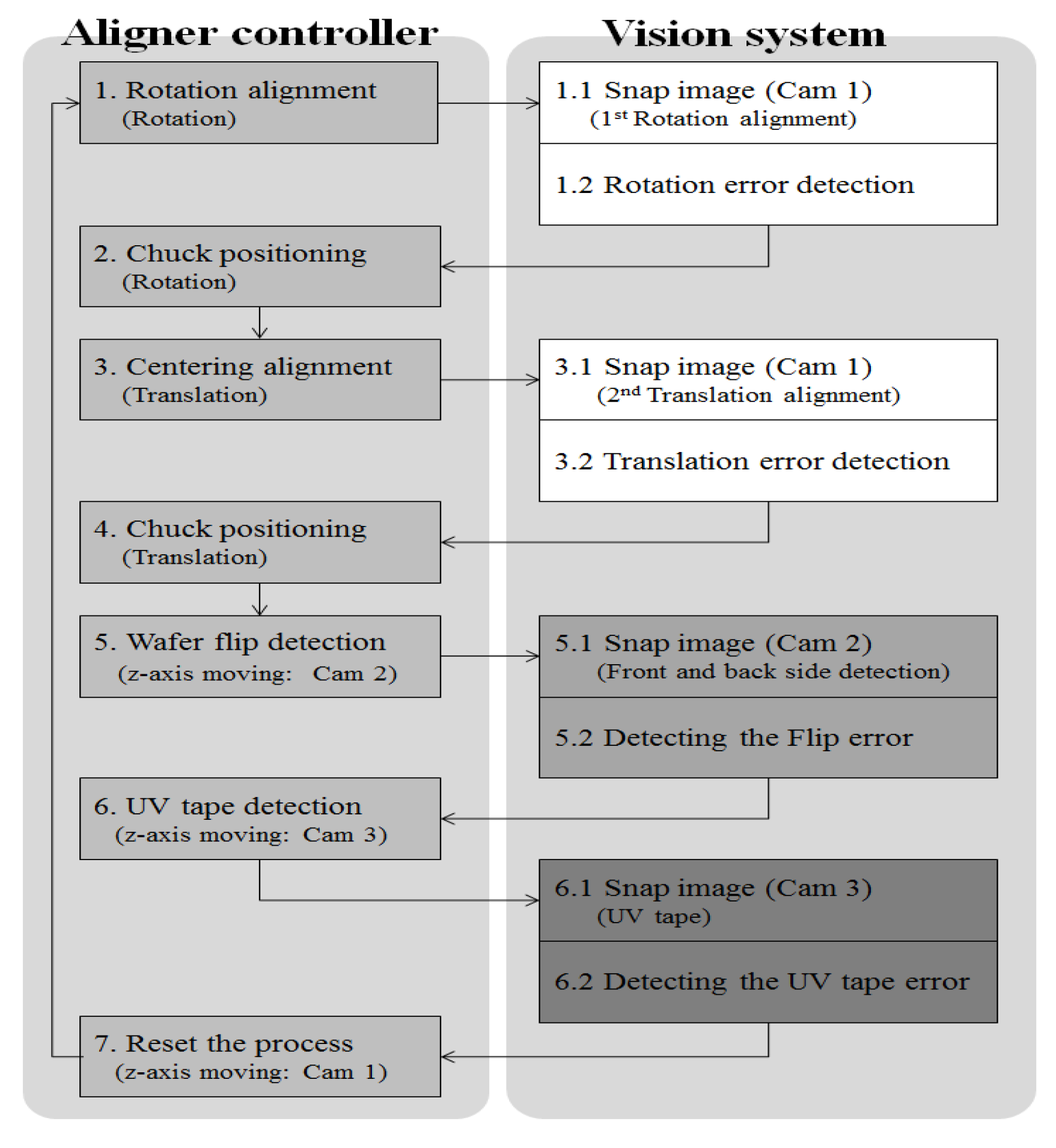
The vision aligner has three basic functions: the correction of the wafer position and angle, detection of wafer inversion, and detection of the attached UV tape. In the manufacturing process with a wafer, UV tape is attached on the front side of surface, and then it is inserted into the cassettes of the wafer bonding process equipment. During the process, many mistakes result from worker error, such as from inserting the wafer into cassette without the UV tape. In this case, the whole mass production process will be stopped until the problem is solved. In order to avoid such an uncertain problem, the vision performs position correction and three steps of inspection as shown in
Figure 7.
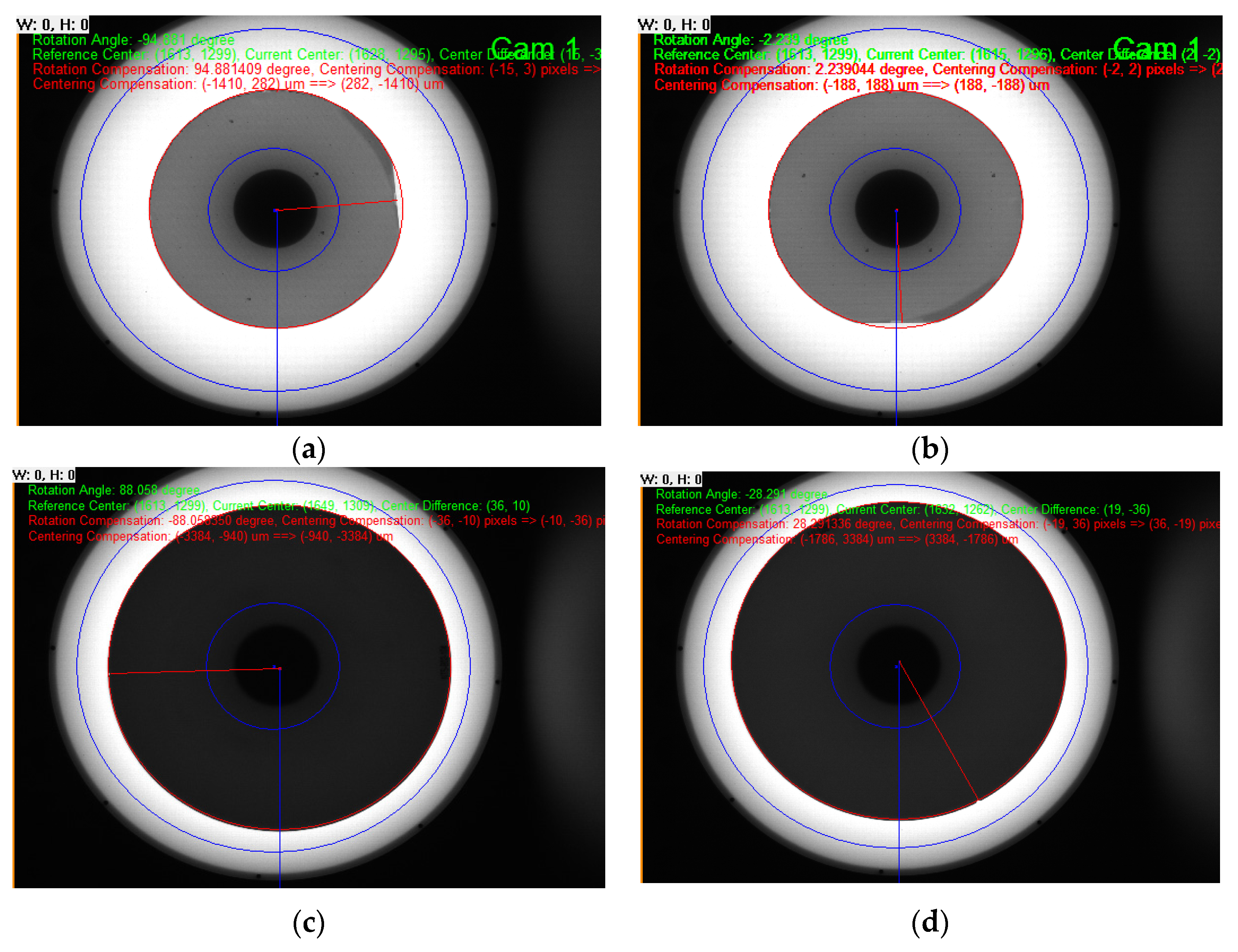
At first, when the wafer transfer robot moves the wafer from the cassette to the work chuck in the aligner, Cam 1 takes the image of the entire area of the present wafer. The error of wafer position and angle are measured by the captured image from Cam 1 of the vision system, as shown in
Figure 8. Then, the measured error is transmitted to the mechanical controller. The controller performs the position and angle correction according to the error values.
Figure 8c,d shows the position correction processes of the plate (notch type), in which the operation method is the same as the wafer position correcting operation. If the deviation of the wafer position is satisfied with the reference value, the system performs the next steps with Cam 2 and 3.
After completing the position and angle correction, the Cam 2 captures the mask pattern of the wafer surface. To determine the correct wafer side, the number of yellow color pixels can be extracted from the pattern (
Figure 9a,b).
Finally, Cam 3 captures the image of the wafer flank to detect the attached UV tape. UV tape can be detected by changing of image values to black and white (image-binarization) and with thickness and threshold comparison with the captured image, as shown in
Figure 10a,b.
The threshold line is set up according to the error range based on the target wafer size and thickness. The UV tape can be detected if the image area of the UV tape crosses the line and thickness.
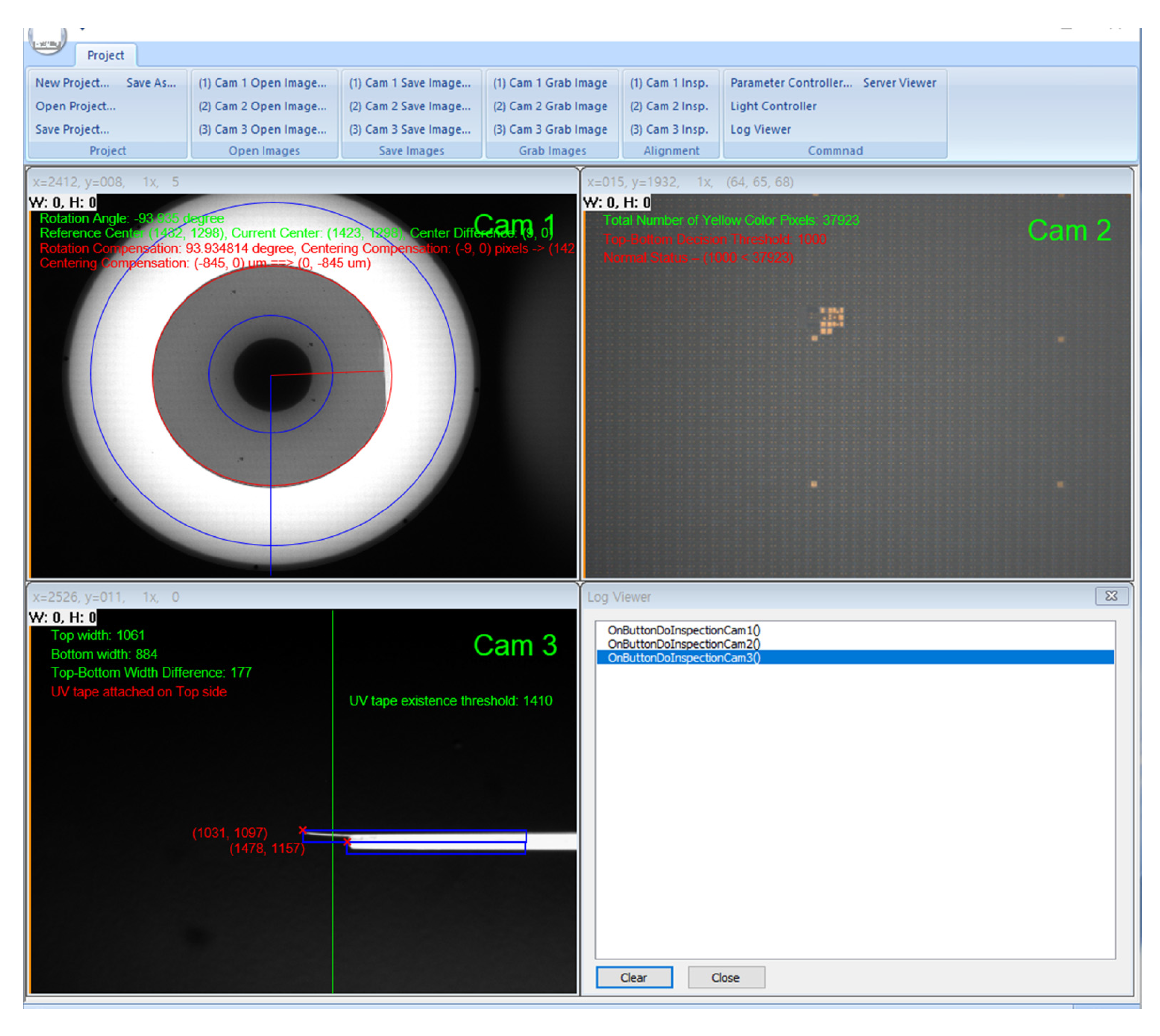
The vision aligner is installed in the fully automated wafer-bonding equipment for LED manufacturing in Korea. To make more suitable equipment for mass production, the vision aligner should be integrated with the controller, and the mass production process should be inspected by a worker. The operation states of the vision aligner are displayed using the Graphical User Interface (GUI) software as shown in
Figure 11. The GUI software has multiple vision methods for the three cameras, and control algorithms for aligner and system monitoring in real time.
3. Performance Test and Consideration of This Research
The proposed vision aligner with vision methods was verified through tests with over 2000 wafers in the mass production field. In the test results, there were no bonding defects caused by the position correction errors, and no occurrence of defects in which wafers were flipped in cassettes with UV tape. The UV tape attached on the wafer tip can be measured with the length over the reference line on the image in most cases. However, when the tips of the UV tape and wafer have the same length, which is the rarely cases, it could not be detected on the basis of a third inspection with Cam 3. In this case, the error occurs on the flat inspection step, and the aligner can sort out the defective wafers.
Figure 12 shows the bonding system equipped with the vision aligner.
The proposed vision method is a new method to replace the conventional one. It is difficult to compare the technical difference between both methods, but some comparison items can be compared, as shown in
Table 1.
With regard to item No. 1, the conventional method cannot be applied to the alignment process steps with a sapphire wafer that has a UV tape, but the vision method can be used for a general wafer or a sapphire wafer. In the conventional method, since the position value is calculated while the wafer is placed, the time required for actual placement is shorter than the new method. However, at mass-production sites, the wafer for final alignment must be rotated more than three times, and the value of the position must be calculated for every rotation. However, since the new method extracts the coordinate values on the image, a separate mechanical operation time is not required. As a result, the alignment process is terminated at less than one rotation of the wafer, and quick response characteristics can be obtained.
In the case of item No. 3, it is necessary to minimize the physical laser component in the conventional method. In addition, minimized components can result in unexpected results at industrial sites due to reduced laser density and signal power. Since the newly proposed method has a size of 94 μm/pixel for one pixel, the accuracy must be at least 94 [μm/pixel].
However, due to interference of light transmitted from outside, unless an accuracy of at least 3 pixels or more is guaranteed, it can be used safely at the industrial site.
4. Conclusions
The semiconductor manufacturing industry is one of the mass production industries. In particular, in the semiconductor manufacturing industry, accuracy is an important factor, as many types of manufacturing equipment have an organic relationship. Considering the characteristics of such industries, the machine vision technology combining vision technology and machine control technology has the advantage that it can actively respond to various working environments.
The vision aligner proposed in this research is a good example of verifying the effectiveness of convergence technology through an operation test at an industrial site. In addition, by applying the vision aligner to the sapphire wafer process, which cannot be done with the conventional method, it is possible to expect development of convergence technology in the future.
In the near future, in order to develop more diverse and advanced technologies, it is necessary to analyze the problems in the industrial field and consider applying multifaceted technologies to solve the problem. Moreover, along with the development of the machine vision technology applied in this research, it is necessary to promote research on various related convergence technologies with artificial intelligence technology.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}