Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter

Abstract
:1. Introduction
2. The OCC Boost PFC Converter
2.1. The OCC Boost PFC Converter and Its Control Circuit
2.2. The OCC Boost PFC Converter Model
3. Stability of the OCC Boost PFC Converter
3.1. The First Harmonic Component
3.2. The DC Component and the Second Harmonic Component
3.3. Stability of the OCC Boost PFC Converter
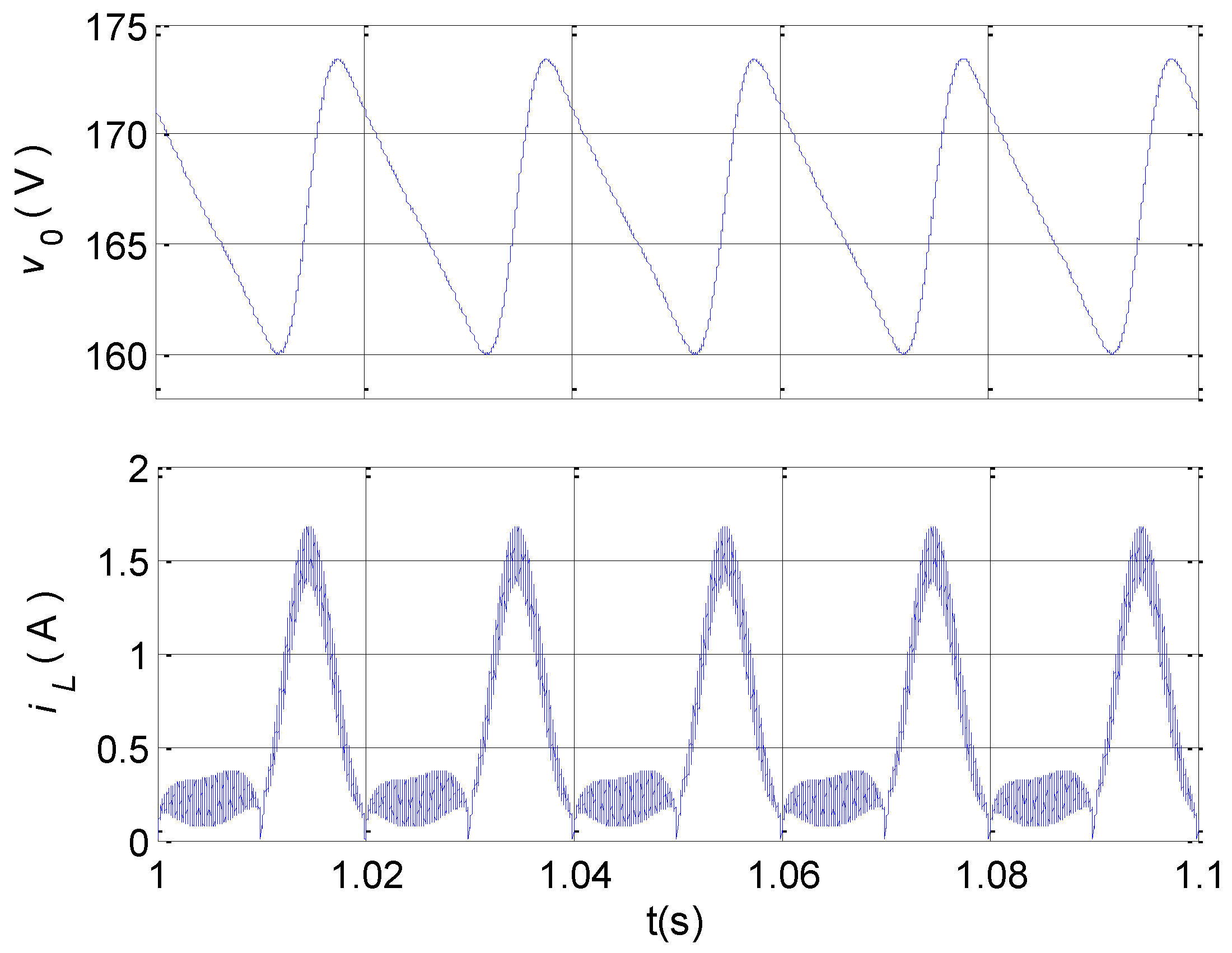
4. Non-Linear Phenomena of the OCC Boost PFC Converter
- The effect of the input voltage on the stability of the converter. Figure 3 shows that when the capacitance is fixed and the input voltage increases, the converter may lose stability.
- The effect of the output capacitance on the stability of the converter. Figure 3 shows that when the input voltage is increased, a larger output capacitance is needed in order to assure stable operation of the converter. This result is important because a larger output capacitance affects the dynamic performance of the converter.
- The difference between the two boundaries lies in the fact that some approximations are taken in the analysis, and only the first and the second harmonic components are taken into consideration.
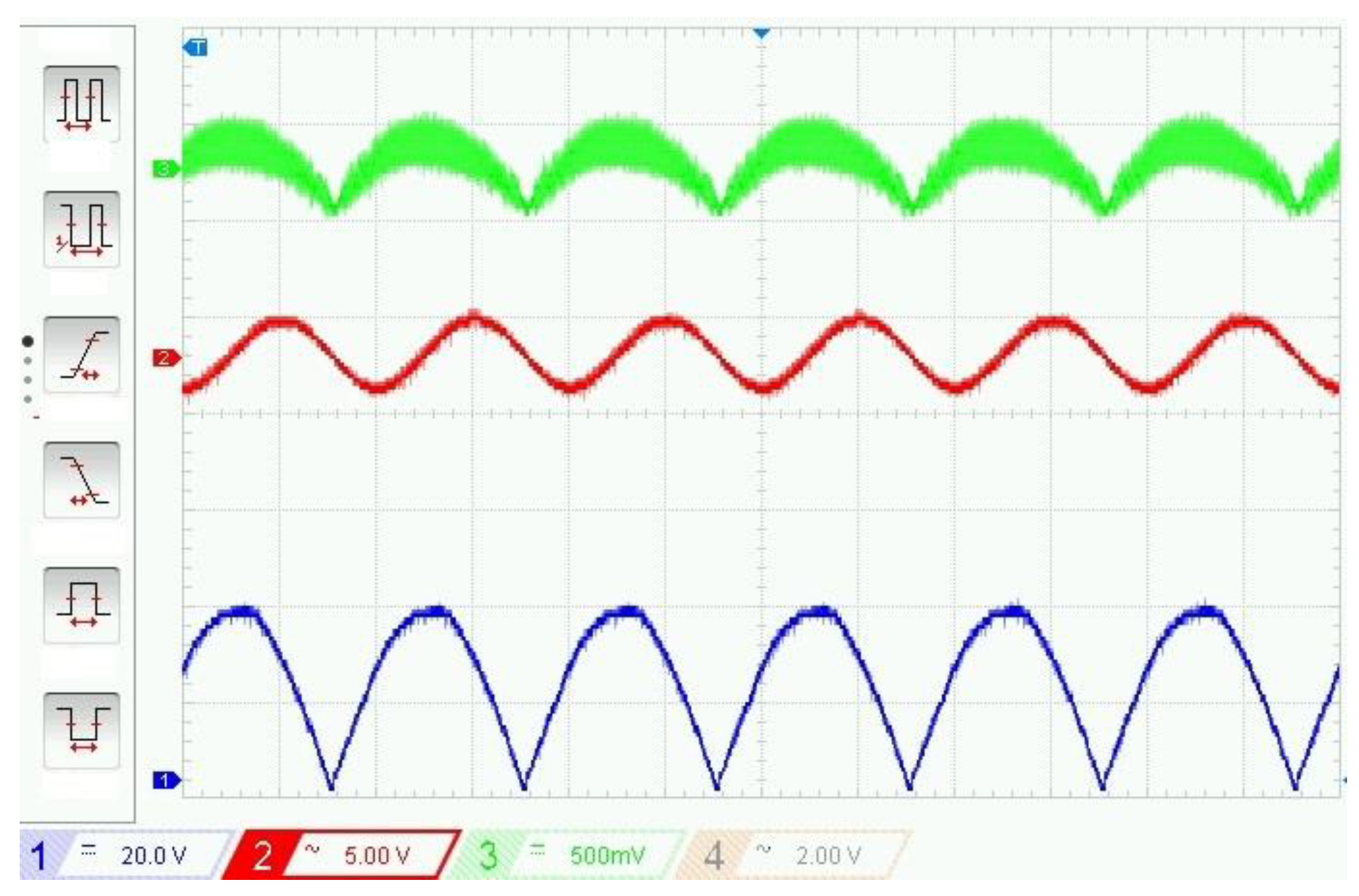
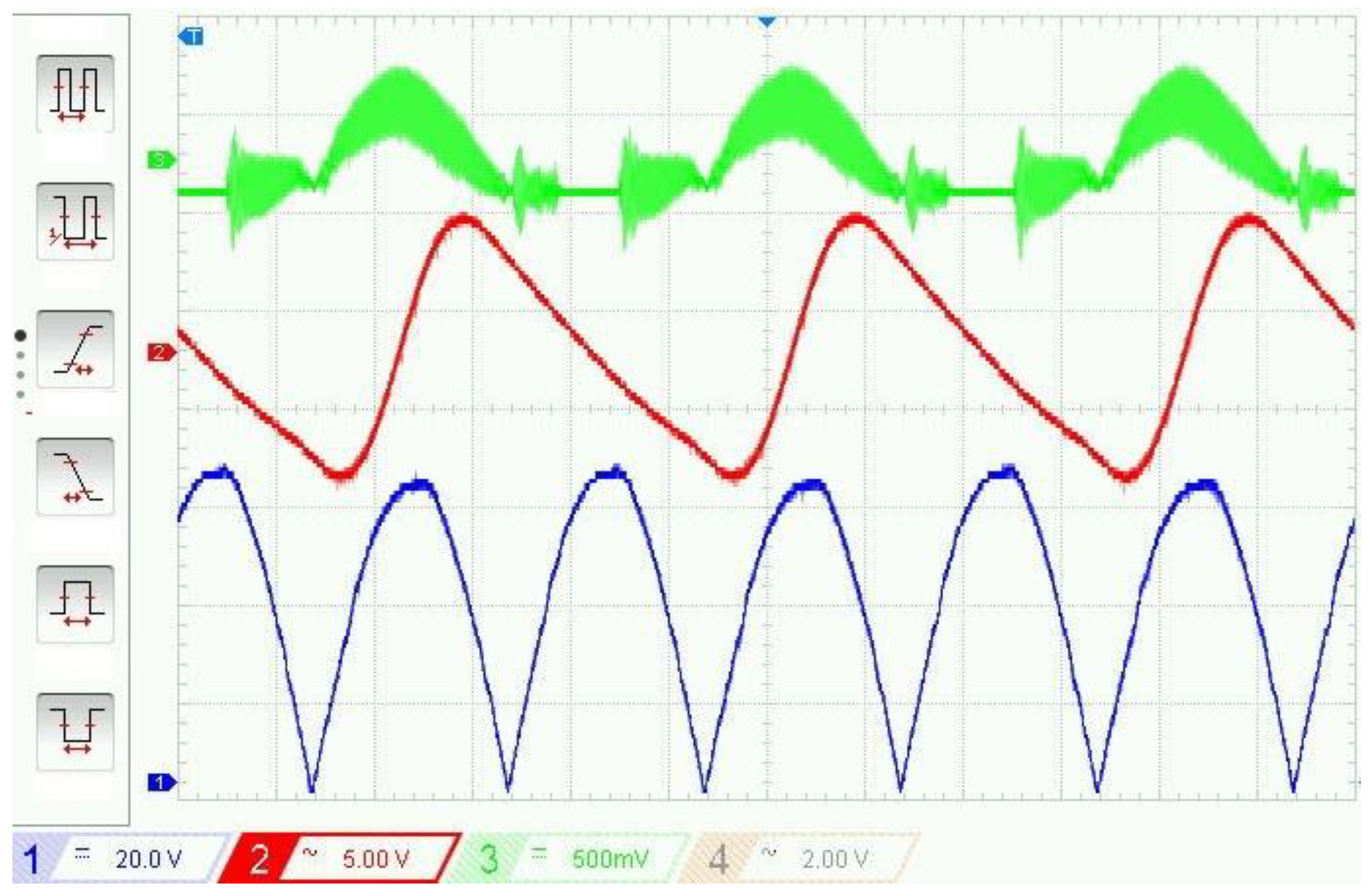
5. Experimental Verifications
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
References
- García, O.; Cobos, J.A.; Prieto, R.; Alou, P.; Uceda, J. Single phase power factor correction: A survey. IEEE Trans. Power Electron. 2003, 18, 749–755. [Google Scholar] [CrossRef]
- Giaouris, D.S.; Banerjee, B.; Zahawi, V. Pickert, Control of fast scale bifurcations in power-factor correction converters. IEEE Trans. Circuits Syst. II 2007, 54, 805–809. [Google Scholar] [CrossRef]
- Lai, Z.; Smedley, K.M. A family of continuous-conduction-mode power-factor-correction controllers based on the general pulse-width modulator. IEEE Trans. Power Electr. 1998, 13, 501–510. [Google Scholar]
- Orabi, M.; Nimoniya, T. Non-linear dynamic of power factor correction converter. IEEE Trans. Ind. Electron. 2003, 50, 1116. [Google Scholar] [CrossRef]
- Iu, H.H.C.; Zhou, Y.F.; Tse, C.K. Fast-scale instability in a PFC boost converter under average current-mode control. Int. J. Circ. Theor. App. 2003, 31, 611–624. [Google Scholar] [CrossRef]
- Orabi, M.; Ninomiya, T. Stability investigation of the cascade twostage PFC converter. IEICE Trans. Commun. 2004, E87-B, 3506–3514. [Google Scholar]
- Chu, G.; Tse, C.K.; Wong, S.C. Line-frequency instability of PFC power supplies. IEEE Trans. Power Electron. 2009, 24, 469–482. [Google Scholar] [CrossRef]
- El Aroudi, A.; Orabi, M.; Haroun, R.; Martínez-Salamero, L. Asymptotic slow-scale stability boundary of PFC AC-DC power converters: Theoretical prediction and experimental validation. IEEE Trans. Ind. Electron. 2011, 58, 3448–3460. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, H.; Ma, X. Analysis of slow-scale instability in boost PFC converter using the method of harmonic balance and floquet theory. IEEE Trans. Circuits Syst. Regul. Pap. 2010, 57, 405–414. [Google Scholar] [CrossRef]
- El Aroudi, A.; Orabi, M. Stabilizing technique for AC-DC boost PFC converter based on time delay feedback. IEEE Trans. Circuits Syst. Express Briefs 2010, 57, 56–60. [Google Scholar] [CrossRef]
- Ma, W.; Wang, M.; Liu, S.; Li, S.; Yu, P. Stabilizing the average current-mode-controlled boost PFC converter via washout-filter-aided method. IEEE Trans. Circuits Syst. Express Briefs 2011, 58, 595–599. [Google Scholar] [CrossRef]
- Zou, J.; Ma, X.; Tse, C.K.; Dai, D. Fast-scale bifurcation in power-factor-correction buck-boost converters and effects of incompatible periodicities. Int. J. Circuit Theory Appl. 2006, 34, 251–264. [Google Scholar] [CrossRef]
- Wu, X.; Tse, C.K.; Dranga, O.; Lu, J. Fast-scale instability of single-stage power-factor-correction power supplies. IEEE Trans. Circuits Syst. Regul. Pap. 2006, 53, 204–213. [Google Scholar] [Green Version]
- Wong, S.-C.; Tse, C.K.; Orabi, M.; Ninomiya, T. The Method of Double Averaging: An Approach for Modeling Power-Factor-Correction Switching Converters. IEEE Trans. Circuits Syst. Regul. Pap. 2006, 53, 454–464. [Google Scholar] [CrossRef]
- Orabi, M.; Haron, R.; Youssef, M.Z. Stability analysis of PFC converters with one-cycle control. In Proceedings of the 31st International Telecommunications Energy Conference, Incheon, Korea, 18–22 October 2009. [Google Scholar]
- Smedley, K.M.; Cuk, S. One-Cycle Control of Switching Converters. IEEE Trans. Power Electr. 1995, 10, 625–633. [Google Scholar] [CrossRef]
- Smedley, K.M.; Cuk, S. Dynamics of One-Cycle controlled cuk converters. IEEE Trans. Power Electr. 1995, 10, 634–639. [Google Scholar] [CrossRef]
- Fang, C.C.; Abed, E.H. Robust feedback stabilization of limit cycles in PWM DC-DC converters. Nonlinear Dyn. 2002, 27, 295–309. [Google Scholar] [CrossRef]
- Fang, C.-C. Sampled-Data modeling and analysis of One-Cycle control and charge control. IEEE Trans. Power Electr. 2001, 16, 345–350. [Google Scholar] [CrossRef]
- Lee, F.; Iwens, R.; Yu, Y.; Triner, J. Generalized computer-aided discrete time domain modeling and analysis of dc-dc converters. In Proceedings of the 1977 IEEE Power Electronics Specialists Conference, Palo Alto, CA, USA, 14–16 June 1977. [Google Scholar]
- Sanders, S.R.; Verghese, G.C. Synthesis of averaged circuit models for switched power converters. IEEE Trans. Circuits Syst. 1991, 8, 905–915. [Google Scholar] [CrossRef]
- Maksimovic, D.; Zane, R.; Erickson, R. Impact of digital control in power electronics. In Proceedings of the 16th International Symposium on Power Semiconductor Devices & ICs, Kitakyushu, Japan, 24–27 May 2004. [Google Scholar]
- Caliskan, V.A.; Verghese, O.C.; Stankovic, A.M. Multifrequency averaging of DC/DC converters. IEEE Trans. Power Electron. 1999, 1, 124–133. [Google Scholar] [CrossRef]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems, 11th ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2008. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Unit |
|---|---|---|
| Ts | 15 | |
| ωm | 100π | rad/s |
| L | 2 | mH |
| C | 100 | |
| Rf1 | 849 | kΩ |
| Rf2 | 37.3 | kΩ |
| Rgm | 10.25 | kΩ |
| Cz | 32 | nF |
| Cp | 32 | pF |
| Vref | 7 | V |
| Rs | 0.645 | Ω |
| R(load) | 1600 | Ω |
| gm | 40 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Ma, W.; Wang, L.; Hu, M.; Cao, L.; Zhou, H.; Zhang, Y. Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter. Electronics 2018, 7, 203. https://doi.org/10.3390/electronics7090203
Zhang R, Ma W, Wang L, Hu M, Cao L, Zhou H, Zhang Y. Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter. Electronics. 2018; 7(9):203. https://doi.org/10.3390/electronics7090203
Chicago/Turabian StyleZhang, Rui, Wei Ma, Lei Wang, Min Hu, Longhan Cao, Hongjun Zhou, and Yihui Zhang. 2018. "Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter" Electronics 7, no. 9: 203. https://doi.org/10.3390/electronics7090203
APA StyleZhang, R., Ma, W., Wang, L., Hu, M., Cao, L., Zhou, H., & Zhang, Y. (2018). Line Frequency Instability of One-Cycle-Controlled Boost Power Factor Correction Converter. Electronics, 7(9), 203. https://doi.org/10.3390/electronics7090203