Survey of Quadruped Robots Coping Strategies in Complex Situations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Traveling Through Challenging Terrain
2.1. Free Gait Planning
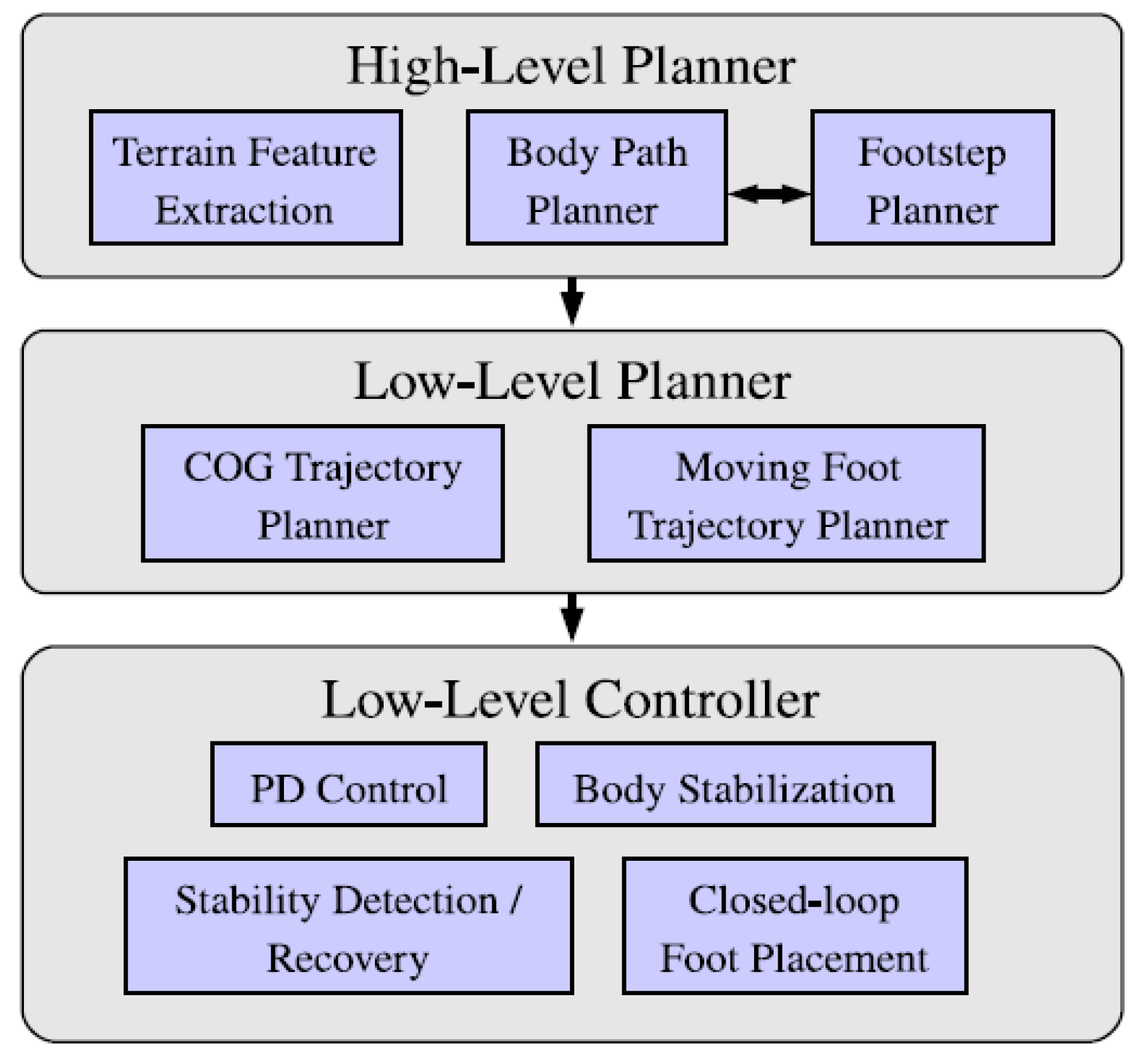
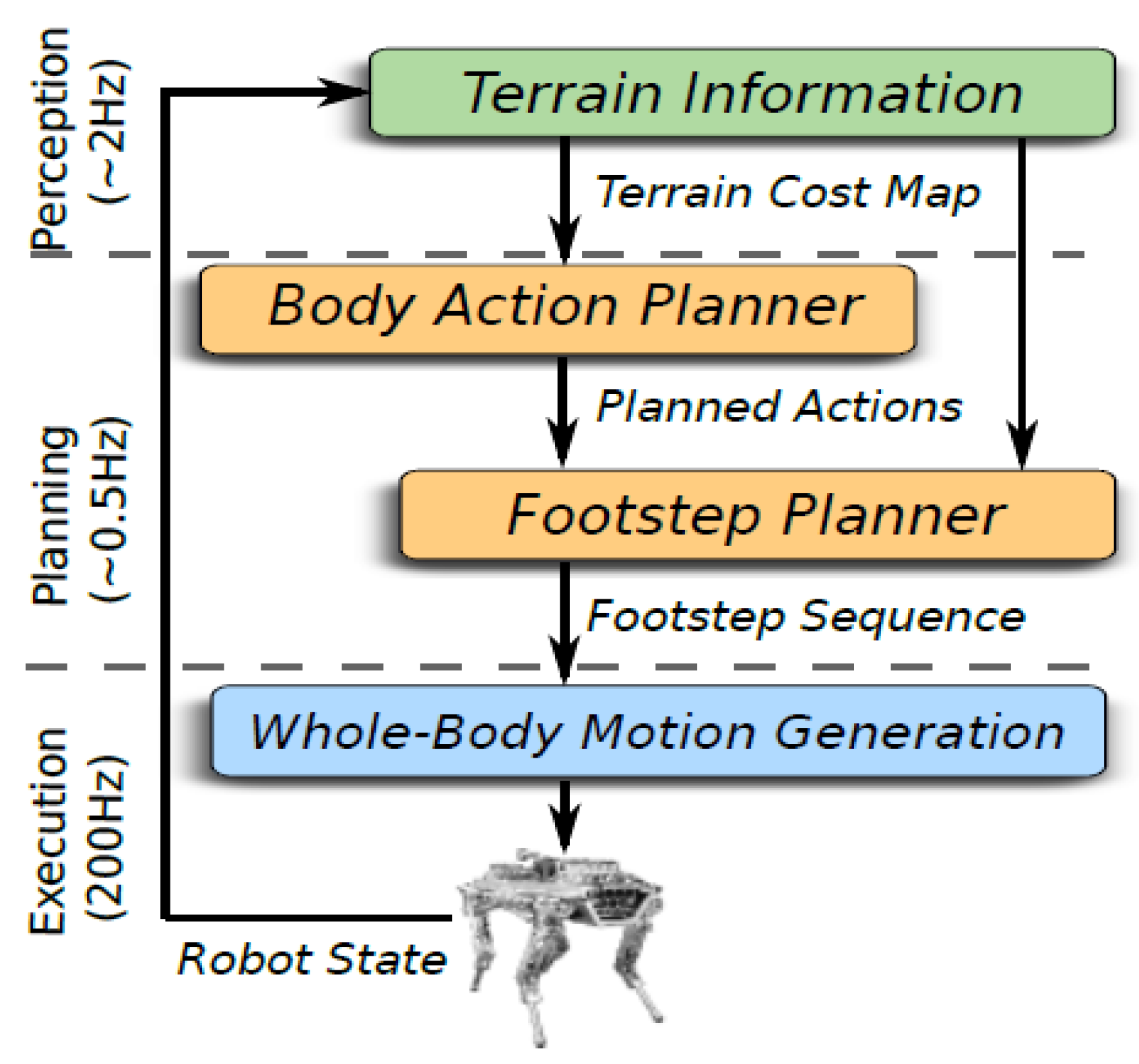
2.2. Hierarchical Control Planning
3. Walking on Slope
3.1. Walking Control Method on Low Slope
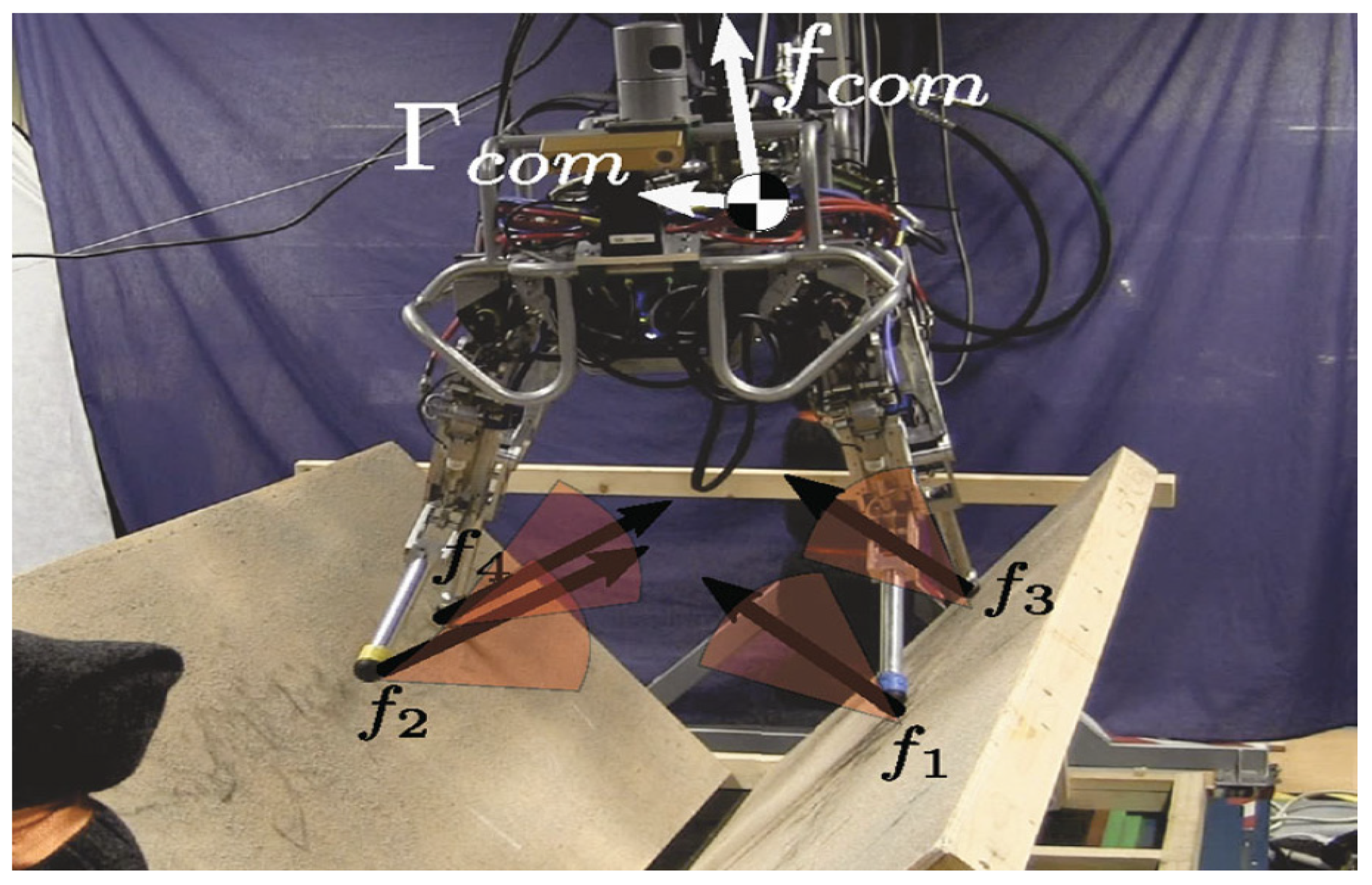
3.2. Walking Mothed on High Slope
4. Coping With the Self-disturbance and External Impact
5. Conclusions and Prospect
Author Contributions
Funding
Conflicts of Interest
References
- Raibert, M.H. Hopping in legged systems—Modeling and simulation for the two-dimensional one-legged case. J. Trans. Syst. Man Cybern. 1984, 14, 451–463. [Google Scholar] [CrossRef]
- Raibert, M.H. Running with symmetry. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1986; pp. 45–61. [Google Scholar]
- Raibert, M.H.; Chepponis, M.; Brown, H. Running on four legs as though they were one. J. Robot. Autom. 1986, 2, 70–82. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. Bigdog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Murphy, M.P.; Saunders, A.; Moreira, C.; Raibert, M. The littledog robot. Int. J. Robot. Res. 2011, 30, 145–149. [Google Scholar] [CrossRef]
- Niquille, S.C. Regarding the Pain of SpotMini: Or What a Robot’s Struggle to Learn Reveals about the Built Environment. J. Archit. Des. 2019, 89, 84–91. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. Anymal-a highly mobile and dynamic quadrupedal robot. In Proceedings of the International Conference on Intelligent Robots and Systems, Daejeon, Korea, 8–9 October 2016; pp. 38–44. [Google Scholar]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ—A hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Sakakibara, Y.; Kan, K.; Hosoda, Y.; Hattori, M.; Fujie, M. Foot trajectory for a quadruped walking machine. In Proceedings of the International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; pp. 315–322. [Google Scholar]
- Wang, L.; Wang, J.; Wang, S.; He, Y. Strategy of Foot Trajectory Generation for Hydraulic Quadruped Robots Gait Planning. J. Mech. Eng. 2013, 49, 39–44. [Google Scholar] [CrossRef]
- Zhang, G. Research on Active Compliance and Trotting Gait Control of a Quadruped Robot. Ph.D. Thesis, Shandong University, Shandong, China, May 2016. [Google Scholar]
- Li, Y.; Li, B.; Rong, X.; Meng, J. Mechanical design and gait planning of a hydraulically actuated quadruped bionic robot. J. Shandong Univ. Eng. Sci. 2011, 41, 32–36. [Google Scholar]
- Meng, J.; Li, Y.; Li, B. Bound gait controlling method of quadruped robot. J. Shandong Univ. Eng. Sci. 2015, 45, 28–34. [Google Scholar]
- Matsuoka, K. Mechanisms of frequency and pattern control in the neural rhythm generators. J. Biol. Cybern. 1987, 56, 345–353. [Google Scholar] [CrossRef]
- Liu, C.; Wang, D.; Goodman, E.D.; Chen, Q. Adaptive walking control of biped robots using online trajectory generation method based on neural oscillators. J. Bion. Eng. 2016, 13, 572–584. [Google Scholar] [CrossRef]
- Zhong, G.; Chen, L.; Jiao, Z.; Li, J.; Deng, H. Locomotion control and gait planning of a novel hexapod robot using biomimetic neurons. J. Trans. Control Syst. Technol. 2017, 26, 624–636. [Google Scholar] [CrossRef]
- Manzoor, S.; Choi, Y. A unified neural oscillator model for various rhythmic locomotions of snake-like robot. J. Neurocomput. 2016, 173, 1112–1123. [Google Scholar] [CrossRef]
- Li, H. Biomimetic Locomotion Control Theories and Methods of Quadruped Robot. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, June 2014. [Google Scholar]
- Saputra, A.A.; Kubota, N. Synthesis of Neural Oscillator based Dynamic Rhythmic Generation in Quadruped Robot Locomotion. In Proceedings of the International Electronics Symposium on Knowledge Creation and Intelligent Computing, Nusa Tenggara Barat, Indonesia, 29–30 October 2018; pp. 184–191. [Google Scholar]
- Wang, B.; Wan, Z.; Zhou, C.; Wu, J.; Qiu, Y.; Gao, Z. A Multi-module Controller for Walking Quadruped Robots. J. Bionic Eng. 2019, 16, 253–263. [Google Scholar] [CrossRef]
- Shao, J.; Ren, D.; Gao, B. Recent advances on gait control strategies for hydraulic quadruped robot. J. Recent Pat. Mech. Eng. 2018, 11, 15–23. [Google Scholar] [CrossRef]
- Chen, X.; Watanabe, K.; Kiguchi, K.; Izumi, K. Path tracking based on closed-loop control for a quadruped robot in a cluttered environment. J. Dyn. Syst. Meas. Control 2002, 124, 272–280. [Google Scholar] [CrossRef]
- Chen, X.; Watanabe, K.; Kiguchi, K.; Izumi, K. An ART-based fuzzy controller for the adaptive navigation of a quadruped robot. J. Trans. Mechatron. 2002, 7, 318–328. [Google Scholar] [CrossRef]
- McGhee, R.B.; Frank, A.A. On the stability properties of quadruped creeping gaits. J. Math. Biosci. 1968, 3, 331–351. [Google Scholar] [CrossRef]
- Winkler, A.W.; Mastalli, C.; Havoutis, I.; Focchi, M.; Caldwell, D.G.; Semini, C. Planning and execution of dynamic whole-body locomotion for a hydraulic quadruped on challenging terrain. In Proceedings of the International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 5148–5154. [Google Scholar]
- Kalakrishnan, M.; Buchli, J.; Pastor, P.; Schaal, S. Learning, planning, and control for quadruped locomotion over challenging terrain. Int. J. Robot. Res. 2011, 30, 236–258. [Google Scholar] [CrossRef]
- Mastalli, C.; Focchi, M.; Havoutis, I.; Radulescu, A.; Calinon, S.; Buchli, J.; Caldwell, D.G.; Semini, C. Trajectory and foothold optimization using low-dimensional models for rough terrain locomotion. In Proceedings of the International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 1096–1103. [Google Scholar]
- Zhang, S.; Li, Y.B.; Song, R.; Rong, X.; Li, B. A free gait planning method based on the foothold search stratrgy for quadruped robot. In Proceedings of the 18th International Conference on CLAWAR, HangZhou, China, 6–9 September 2015; pp. 461–468. [Google Scholar]
- Zhang, S.; Fan, M.; Li, Y.B.; Rong, X.; Liu, M. Generation of a continuous free gait for quadruped robot over rough terrains. Adv. Robot. 2019, 33, 74–89. [Google Scholar] [CrossRef]
- Kolter, J.Z.; Rodgers, M.P.; Ng, A.Y. A control architecture for quadruped locomotion over rough terrain. In Proceedings of the International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 811–818. [Google Scholar]
- Liu, G. Research on Free Gait Planning and Control for Quadruped Robot Walking over Terrain that Contains Obstacles. Master’s Thesis, University of Electronic Science and Technology, ChengDu, China, May 2015. [Google Scholar]
- Wermelinger, M.; Fankhauser, P.; Diethelm, R.; Krusi, P.; Siegwart, R.; Hutter, M. Navigation planning for legged robots in challenging terrain. In Proceedings of the International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 Octobor 2016; pp. 1184–1189. [Google Scholar]
- Fankhauser, P.; Bjelonic, M.; Bellicoso, C.D.; Miki, T.; Hutter, M. Robust rough-terrain locomotion with a quadrupedal robot. In Proceedings of the International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Li, X.; Gao, H.; Li, J.; Wang, Y.; Guo, Y. Hierarchically Planning Static Gait for Quadruped Robot Walking on Rough Terrain. J. Robot. 2019, 2019, 12. [Google Scholar] [CrossRef]
- Barasuol, V.; Buchli, J.; Semini, C.; Frigerio, M.; De Pieri, E.R.; Caldwell, D.G. A reactive controller framework for quadrupedal locomotion on challenging terrain. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2554–2561. [Google Scholar]
- Ajallooeian, M.; Pouya, S.; Sproewitz, A.; Ijspeert, A.J. Central pattern generators augmented with virtual model control for quadruped rough terrain locomotion. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3321–3328. [Google Scholar]
- Shkolnik, A.; Levashov, M.; Manchester, I.R. Bounding on rough terrain with the LittleDog robot. Int. J. Robot. Res. 2011, 30, 192–215. [Google Scholar] [CrossRef]
- LaValle, S.M.; Kuffner, J.J., Jr. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, H.; Yang, Y.; Wang, J. The quadruped robot adaptive control in trotting gait walking on slopes. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2017; p. 020004. [Google Scholar]
- Wagner, L.; Fankhauser, P.; Bloesch, M.; Mutter, M. Foot contact estimation for legged robots in rough terrain. In Advances in Cooperative Robotics; WSPC: London, UK, 2017; pp. 395–403. [Google Scholar]
- Liu, C.; Xia, L.; Zhang, C.; Chen, Q. Multi-layered CPG for adaptive walking of quadruped robots. J. Bion. Eng. 2018, 15, 341–355. [Google Scholar] [CrossRef]
- Yu, C.; Zhou, L.; Qian, H.; Xu, Y. Posture Correction of Quadruped Robot for Adaptive Slope Walking. In Proceedings of the International Conference on Robotics and Biomimetics, Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1220–1225. [Google Scholar]
- Boaventura, T.; Semini, C.; Buchli, J.; Frigerio, M.; Focchi, M.; Caldwell, D.G. Dynamic torque control of a hydraulic quadruped robot. In Proceedings of the international conference on robotics and automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1889–1894. [Google Scholar]
- Macchietto, A.; Zordan, V.; Shelton, C.R. Momentum control for balance. In ACM Transactions on Graphics; ACM: New York, NY, USA, 2009; p. 80. [Google Scholar]
- Lee, S.H.; Goswami, A. A momentum-based balance controller for humanoid robots on non-level and non-stationary ground. Auton. Robots 2012, 33, 399–414. [Google Scholar] [CrossRef]
- Righetti, L.; Buchli, J.; Mistry, M.; Schaal, S. Control of legged robots with optimal distribution of contact forces. In Proceedings of the International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 318–324. [Google Scholar]
- Righetti, L.; Buchli, J.; Mistry, M.; Kalakrishnan, M.; Schaal, S. Optimal distribution of contact forces with inverse-dynamics control. Int. J. Robot. Res. 2013, 32, 280–298. [Google Scholar] [CrossRef]
- Awan, Z.S.; Ali, K.; Iqbal, J.; Mehmood, A. Adaptive Backstepping Based Sensor and Actuator Fault Tolerant Control of a Manipulator. J. Electr. Eng. Technol. 2019, 14, 2497–2504. [Google Scholar] [CrossRef]
- Gehring, C.; Coros, S.; Hutter, M.; Bloesch, M.; Hoepflinger, M.A.; Siegwart, R. Control of dynamic gaits for a quadrupedal robot. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3287–3292. [Google Scholar]
- Hutter, M.; Hoepflinger, M.A.; Gehring, C.; Bloesch, M. Hybrid operational space control for compliant legged systems. In Proceedings of the Robotics: Science and Systems, Sydney, Australia, 9–13 July 2012. [Google Scholar]
- Focchi, M.; Del Prete, A.; Havoutis, I.; Featherstone, R.; Caldwell, D.; Semini, C. High-slope terrain locomotion for torque-controlled quadruped robots. Auton. Robot. 2017, 41, 259–272. [Google Scholar] [CrossRef]
- Li, K.; Nuchkrua, T.; Zhao, H.; Yuan, Y.; Boonto, S. Learning-based Adaptive Robust Control of Manipulated Pneumatic Artificial Muscle Driven by H 2-based Metal Hydride. In Proceedings of the 14th IEEE International Conference on Automation Science and Engineering, Munich, Germany, 20–24 August 2018; pp. 1284–1289. [Google Scholar]
- Li, J.; Wang, J.; Yang, S.; Zhou, K.; Tang, H. Gait planning and stability control of a quadruped robot. Comput. Intell. Neurosci. 2016, 2016, 13. [Google Scholar] [CrossRef]
- Gonzalez-Luchena, I.; Gonzalez-Rodriguez, A.G.; Gonzalez-Rodriguez, A.; Adame-Sanchez, C.; Castillo-Garcia, F. A new algorithm to maintain lateral stabilization during the running gait of a quadruped robot. Robot. Auton. Syst. 2016, 83, 57–72. [Google Scholar] [CrossRef]
- Boussema, C.; Powell, M.J.; Bledt, G.; Ijspeert, A.J.; Wensing, P.M.; Kim, S. Online gait transitions and disturbance recovery for legged robots via the feasible impulse set. J. Robot. Autom. Lett. 2019, 4, 1611–1618. [Google Scholar] [CrossRef]
- Tian, X.; Gao, F.; Qi, C.; Chen, X.; Zhang, D. External disturbance identification of a quadruped robot with parallel–serial leg structure. Int. J. Mech. Mater. Des. 2016, 12, 109–120. [Google Scholar] [CrossRef]
- Chen, Y.; Hou, W.Q.; Wang, J.; Ma, H. A strategy for push recovery in quadruped Robot based on reinforcement learning. In Proceedings of the 34th Chinese Control Conference, HangZhou, China, 28–30 July 2015; pp. 3145–3151. [Google Scholar]
- Fankhauser, P.; Hutter, M.; Gehring, C.; Bloesch, M.; Hoepflinger, M.A.; Siegwart, R.; Hutter, M. Reinforcement learning of single legged locomotion. In Proceedings of the International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 188–193. [Google Scholar]
- Edrisi, F.; Majd, V.J.; Attar, M.; Dini, N. Modifying the attitude of quadruped robot body against disturbances via data fusion. In Proceedings of the International Conference on Robotics & Mechatronics, Tehrān, Iran, 26–28 October 2017; pp. 55–60. [Google Scholar]
- De Oliveira Floriano, B.R.; de Freitas Porphirio, C.; Santana, P.H.M.; Borges, G.A.; Romariz, A.R.S. Walking Pattern Design and Balance Control of a Quadruped Platform. In Proceedings of the Workshop on Robotics in Education, Joao Pessoa, Brazil, 6–8 November 2018; pp. 242–247. [Google Scholar]
- Khorram, M.; Moosavian, S.A.A. Balance recovery of a quadruped robot. In Proceedings of the International Conference on Robotics & Mechatronics, Tehrān, Iran, 7–9 October 2015; pp. 259–264. [Google Scholar]
- Khorram, M.; Moosavian, S.A.A. Push recovery of a quadruped robot on challenging terrain. Robotica 2017, 35, 1670–1689. [Google Scholar] [CrossRef]
- Ren, D.; Shao, J.; Sun, G.; He, J. Torso disturbance inhibition and experiment research of hydraulic quadruped robot. Chin. J. Sci. Instrum. 2019, 40, 163–171. [Google Scholar]
- Takemura, H.; Deguchi, M.; Ueda, J.; Matsumoto, Y.; Ogasawara, T. Slip-adaptive walk of quadruped robot. Robot. Auton. Syst. 2005, 53, 124–141. [Google Scholar] [CrossRef]
- Focchi, M.; Barasuol, V.; Frigerio, M.; Caldwell, D.; Semini, C. Slip Detection and Recovery for Quadruped Robots. In Robotics Research; Springer: Cham, Switzerland, 2018; pp. 18–199. [Google Scholar]
- Yun, S.; Goswami, A. Tripod fall: Concept and experiments of a novel approach to humanoid robot fall damage reduction. In Proceedings of the International Conference on Robotics and Automation, Hong Kong, China, 31 May–5 Jun 2014; pp. 2799–2805. [Google Scholar]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, J.; Shao, J.; Sun, G.; Shao, X. Survey of Quadruped Robots Coping Strategies in Complex Situations. Electronics 2019, 8, 1414. https://doi.org/10.3390/electronics8121414
He J, Shao J, Sun G, Shao X. Survey of Quadruped Robots Coping Strategies in Complex Situations. Electronics. 2019; 8(12):1414. https://doi.org/10.3390/electronics8121414
Chicago/Turabian StyleHe, JingYe, JunPeng Shao, GuiTao Sun, and Xuan Shao. 2019. "Survey of Quadruped Robots Coping Strategies in Complex Situations" Electronics 8, no. 12: 1414. https://doi.org/10.3390/electronics8121414