1. Introduction
Owing to its advantages on efficiency, power density, and compact structure, PMSMs have been widely employed in various electrical drive appliances in vehicle, aerospace, and other industrial fields. There are a variety of control strategies designed to improve PMSMs’ output performance. Field-oriented control (FOC), also called vector control, and direct torque control (DTC) are the two most common control frames together with many other modified methods. It is well known that FOC and DTC have limitations on necessity of independent
d-q current controllers with a pulse modulator and considerable torque ripple, respectively [
1]. Recently, thanks to the continuous advancement of digital signal processing technology over the last decades [
2], the model predictive control (MPC), with intuitive operation principle and good transient performance, has gained attention on regulating the output current or torque of PMSMs, yielding the predictive current control (PCC). Overall, the PCC can be divided into three categories: the conventional finite-control-set PCC, the Double VVs, and deadbeat PCC. They have been successfully implemented on controllers of PMSMs [
3,
4].
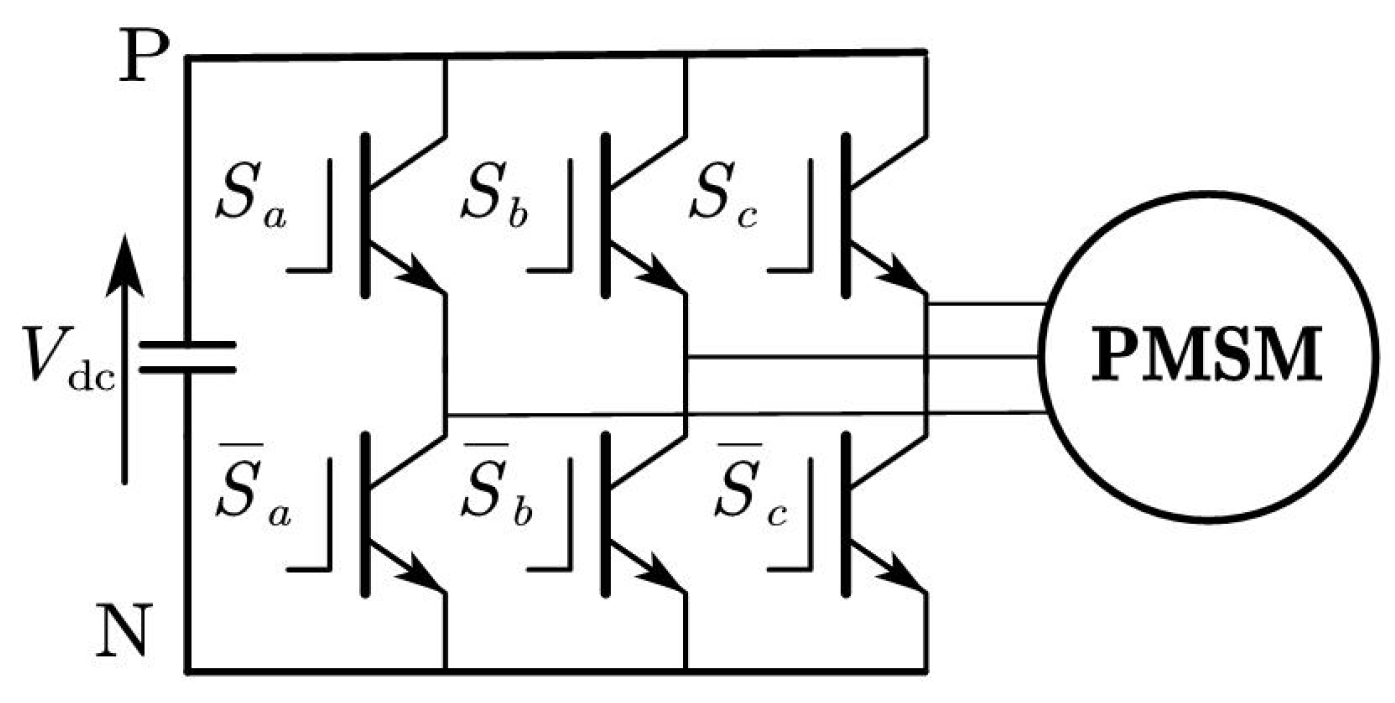
The conventional finite-control-set PCC, also known as direct PCC, takes advantage of the inherent nature of inverter that has a finite number of switching states
S, where
for the commonly used two-level voltage source inverter; thus, there are eight voltage vectors (VVs) including six active VVs and two null VVs. All the VVs are used to predict possible stator currents
based on the discrete model of motor. The one that minimizes a cost function evaluating the error between the reference current
i and the predictions
and other constraints is selected as the action of the next control period. Although the conventional PCC has feature of intuitive principle, there are several drawbacks, e.g. high current ripple as amplitude, phase of the action VV cannot be adjusted, and computational burden result from the enumerated way to search the optimal VV. The inverter is operated in a variable switching frequency because of only one VV per period with no need for a modulator, causing large harmonics [
2]. To overcome this, the Double VVs PCC is introduced by taking account of exerting two voltage vectors using a PWM modulator in a control period. Combination forms of two VVs have been explored. The authors of [
3,
4,
5] considered one active vector and a successively null vector as a set, thus amplitude of the resultant vector can be adjusted. However, Zhang and Yang [
6] showed it has an inferior steady-state performance at high speed. Therefore, Liu et al. [
7] considered all the feasible combinations of two VVs so that the phase of the composed vector can be adjusted, but the situation that two non-adjacent vectors are combined would increase the switching loss of inverter. The duty cycle of each vector is calculated based on the current dead-bead principle in the above methods, which considers the current will reach the reference value at the end of this operation.
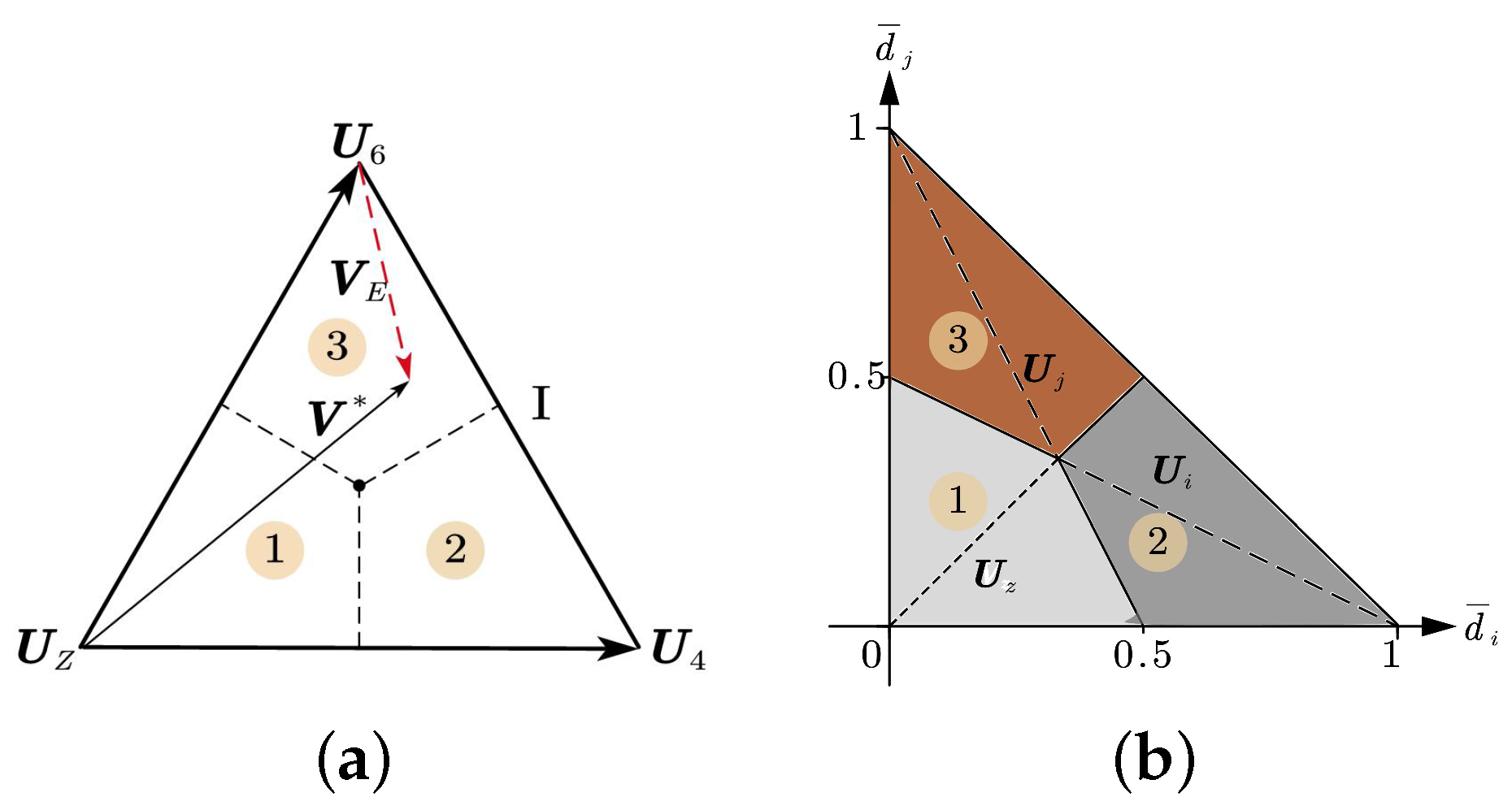
The Deadbeat PCC is similar to the FOC scheme, which usually has a space vector PWM modulator, and its optimal control set composed by two adjacent active VVs and a null VV is determined by the reference voltage, which is directly obtained from the predictive model of PMSMs based on the deadbeat idea [
3], while that of FOC is from a specific PI or other complex current controller.
The performance differences about the three PCC schemes can be found in [
3]. Each scheme has its unique advantage, such as less nonlinearity of inverter introduced for direct PCC in each control period. In this paper, the above three methods are simply denoted as 1-PCC, 2-PCC and 3-PCC, respectively. The numeric symbols represent the number of voltage vectors applied per control period. Currently, there are numerous variations of those schemes implemented in different computation ways. For example, the 1-PCC is implemented on
-frame based on an enumerated way, while the 2-PCC usually takes
d-
q coordinate, which is not convenient for engineers. One study on unifying the 1-PCC and 2-PCC method in one frame [
8] reveals that an alternative cost function about voltage vector is equivalent to the conventional one, but its calculation process is still not intuitive. This paper proposes a generalized predictive current control scheme based on the principle of deadbeat control and vector composition in an explicit way. It is shown that 3-PCC can easily be reduced to 2-PCC and 1-PCC by judging simple linear equations. The durations of VVs for 2-PCC can be calculated simultaneously. Consideration for the system uncertainty can also be included.
An inevitable issue is that the PCC heavily relies on the model parameters of motor, resulting in current tracking performance deterioration when occurring in parameter mismatch. The nonlinear control is widely used to cope with this situation. For example, the sliding mode observers are frequently designed to estimate the disturbance caused by parameter uncertainty [
9,
10,
11]. The uncertain term in the predictive model can be replaced by nonlinear function [
12]. Advanced robust techniques are often introduced to design control law, such as the control-Lyapunov function [
13], disturbance estimation [
14], and differential flatness [
15]. Another strategy lies in the parameter identification, such as a recursive inductance estimator [
9], multi-parameter identification with a decoupling method [
16], model reference adaptive technique [
17], extended Kalman filter [
18], modified particle swarm optimization [
19], Adaline neural network [
20], etc. All those methods aim to acquire accurate parameters, which is not necessary in the PCC schemes. In this paper, we estimate three model error terms caused by parameter perturbation. Thus, the identification model can be simplified into a linear regression model. Then, a integrated identification method is proposed to approximate the error terms.
This paper is organized as follows. The predictive model of a surface-mounted PMSM and the calculation of the inverter’s output voltage are presented in
Section 2.
Section 3 proposes the generalized predictive current control scheme. The model identifying method based on a modified multi-innovation recursive least square to estimate the model error is presented in
Section 4.
Section 5 presents the PIL test results of proposed method. Finally, the conclusions are drawn in
Section 6.
4. Identification for Model Uncertain Term
In this section, we estimate the three error terms caused by inaccurate resistance, inductance, and flux linkage in the current error predictive model, rather than identify the electromagnetic parameter in the nonlinear model. Based on Equation (
1), we can predict the (
)th current
at the
kth instant, and acquire the real value
at the next instant of the predictive current error model
, namely
It can be seen that we can estimate the whole error vector just by the q-axis error equation. Since the sample time of angular velocity is much slower than electrical dynamic, staying constant during several sampling intervals of current is not accurate if only the q-axis dynamic information is used. Therefore, we firstly utilize the d-axis electrical information to identify the first two error term and , and then independently analyze the third term .
Most of identification methods make full use of the dynamic information of motor system, but the obtained current and rotor position of the system is commonly accompanied by large noise signal, which causes failure of some ideal methods despite the presence of the filter. An effective method of interval-varying multi-innovation least squares (V-MILS) was proposed by Ding et al. [
22] to overcome missing measurement data. Thus, we combine a data selector and interval-varying multi-innovation least squares with forgetting factor (V-FF-MILS) algorithm to identify the error vector in
d-axis prediction error equation.
Firstly, we define an integer sequence
,
s=0, 1, 2…to label the signals passed from selector
as
satisfies
, and the interval
.
and
are the reasonable ranges of d-axis current and its predictive error, respectively. Based on the principle of V-MILS, the predictive error model of
d-axis current can be represented in linear regressive form,
where
The interval-varying multi-innovation least squares with forgetting factor algorithm can be written as follows,
The forgetting factor satisfies
. The initial condition is set as
. The two error terms are approximated after finite recursive estimation. A termination principle of identification is designed as
and are the maximum and minimum value of identification during an interval with enough length. can reflect the fluctuation amplitude of online identifying results. After acquiring estimated and , the third error term can be derived by real-time information of q-axis current equation. Our strategy is to command the angular velocity of rotor in a constant values; choose the effective q-axis data by a similar selector ;, and then online analyze the proportional relation between the error term result from and in a linear regression technique. The ratio is the estimated value of .
5. PIL Test Results
The proposed methods were verified using processor-in-loop (PIL) simulation, which means the algorithm was conducted in a real microprocessor. The mathematical model of the plant was run in the PC host and exchanged data by serial communication. The real parameters of this PMSM were , mH, Wb, and . The DC bus voltage was V. The speed controller utilized PI regulator with and . Its sample time was set equal to 1 ms, and for current controller was 100 s. The TI TMS32F28335 was selected as control processor. The identification for three uncertain term in motor model was tested in two designed cases. In Case 1, the nominal resistance was enlarged two times, with three times flux linkage, and the inductance was a quarter of real values. In Case 2, we assumed that inductance was known but a small deviation was artificially created to generate enough current prediction error. The nominal resistance and flux linkage were enlarged as and , independently. Both cases considered the disturbance of noise signal. All the sampling signals were accompanied with a noise signal of which expectation equaled zero, and variance was . Results are presented and compared in the following figures. The labels 1-PCC, 2-PCC, and 3-PCC represent the proposed predictive current control methods. C-PCC, FOC, and DTC-SVM denote the conventional PCC, vector control, and direct torque control with a space vector modulator, respectively.
Figure 7a and
Figure 8 show the transient performances at the start-up phase after the speed command of 1000 r/min. It is illustrated that all methods have the same current transient response in
Figure 7a,b, in which both approximate current reference value at the time of 0.005 s. In
Figure 8, performance of speed response at start-up phase of all methods are compared. They all show a similar capability that reaches the speed command at about 0.2 s, which verifies that the proposed PCCs keep the superior transient performance of classical current regulation strategies.
In
Figure 9 and
Figure 10, the transient performance of the proposed controller is further verified under the change of load and speed.
Figure 9 compares the
q-axis current tracking capability, where the red line denotes the reference values
from speed controller, it can be seen that C-PCC and 1-PCC have almost the same current response when the load is suddenly changed from 0.2 Nm to 0.4 Nm at the instant of 0.5 s. Performance of 3-PCC is close to that of FOC, which are both slightly better than 2-PCC with less ripple during tracking the reference current. DTC-SVM has the largest ripple during the transient process. In
Figure 10, we gradually reduce the rotational speed from 1000 r/min to −1000 r/min at a constant rate within 1 s. The u-phase current regulation capabilities of 1-PCC and C-PCC show same tracking accuracy, but they both encounter large current perturbation when the motor is in counter rotation at the time of 4.0 s. 2-PCC, 3-PCC, and FOC show higher accuracy whether tracking phase current or speed. Similarly, DTC-SVM presents large ripple of u-phase current with the speed adjusted.
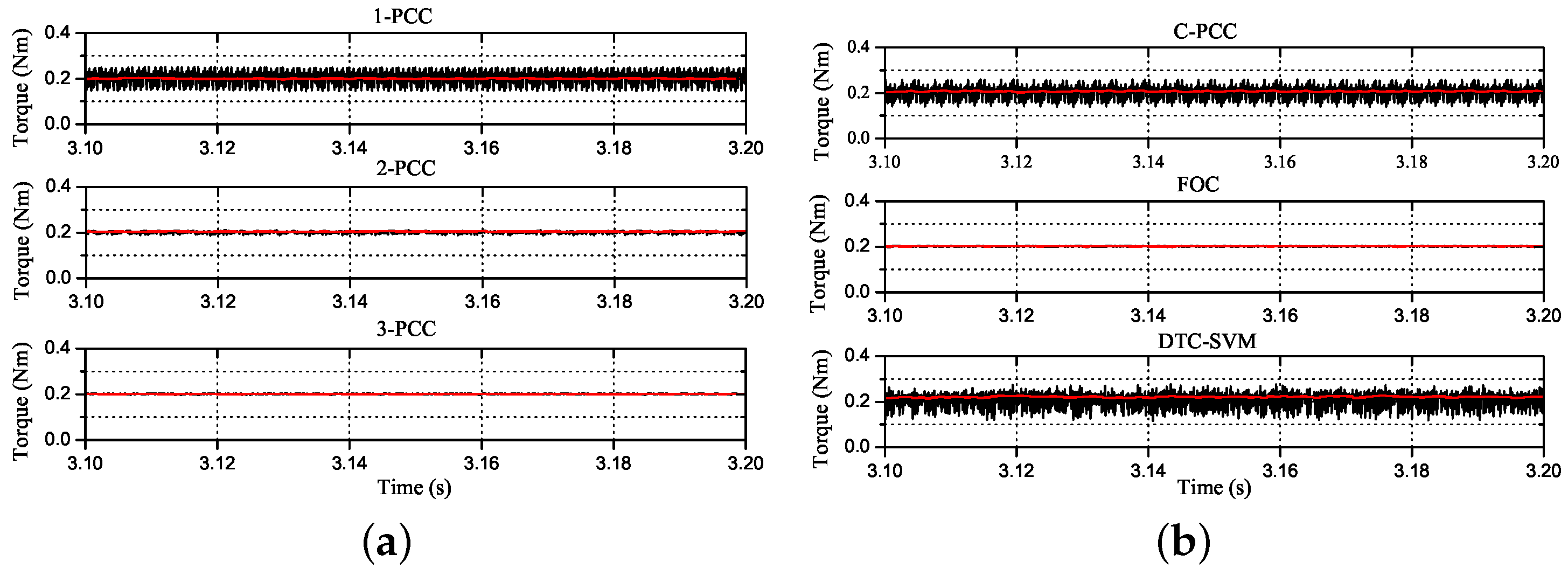
Figure 11a,b compares the steady-state performance of output torque within 0.1 s, and the standard deviations of
q-axis current that represent the degree of torque ripple are 0.3689 and 0.3687 for C-PCC and 1-PCC, respectively, both inevitably leading to large output torque ripple. Relatively, the steady-state errors in 2-PCC and 3-PCC are much smaller, with 0.0576 and 0.0181 standard differences, respectively. These results are in accordance with other researcher’s work [
3]. FOC shows a high accuracy for torque, while DTC-SVM is the worst case. It is noted that the control parameters of FOC in this test were searched by optimization algorithm in Matlab software to make sure of the best output performance.
In
Figure 12, the left column depicts total harmonic distortion (THD) of u-phase current of the proposed PCCs in steady state, with 20.05%, 5.84%, and 1.28% for 1-PCC, 2-PCC, and 3-PCC, respectively. The right column presents the corresponding THD of comparison group. Obviously, the optimal FOC has minimum THD, which is roughly equal to that of 3-PCC. The largest THD belongd to DTC-SVM. The harmonic quality of C-PCC and 1-PCC are similar based on the same current response and THD values. Therefore, the results in
Figure 11a,b and
Figure 12 show that the proposed approaches have advantage in steady-state output accuracy, especially 2-PCC and 3-PCC.
The quantifiable metrics in speed response time in start-up phase and the steady performance verified by harmonic component and current standard deviation of each approach are listed in
Table 1. It can be seen that the transient response has no obvious difference. 2-PCC and 3-PCC present superior steady output accuracy. Although FOC has slightly better performance, it is difficult to obtain the optimal control parameters in practical application, while the proposed PCCs have no need of parameter tuning.
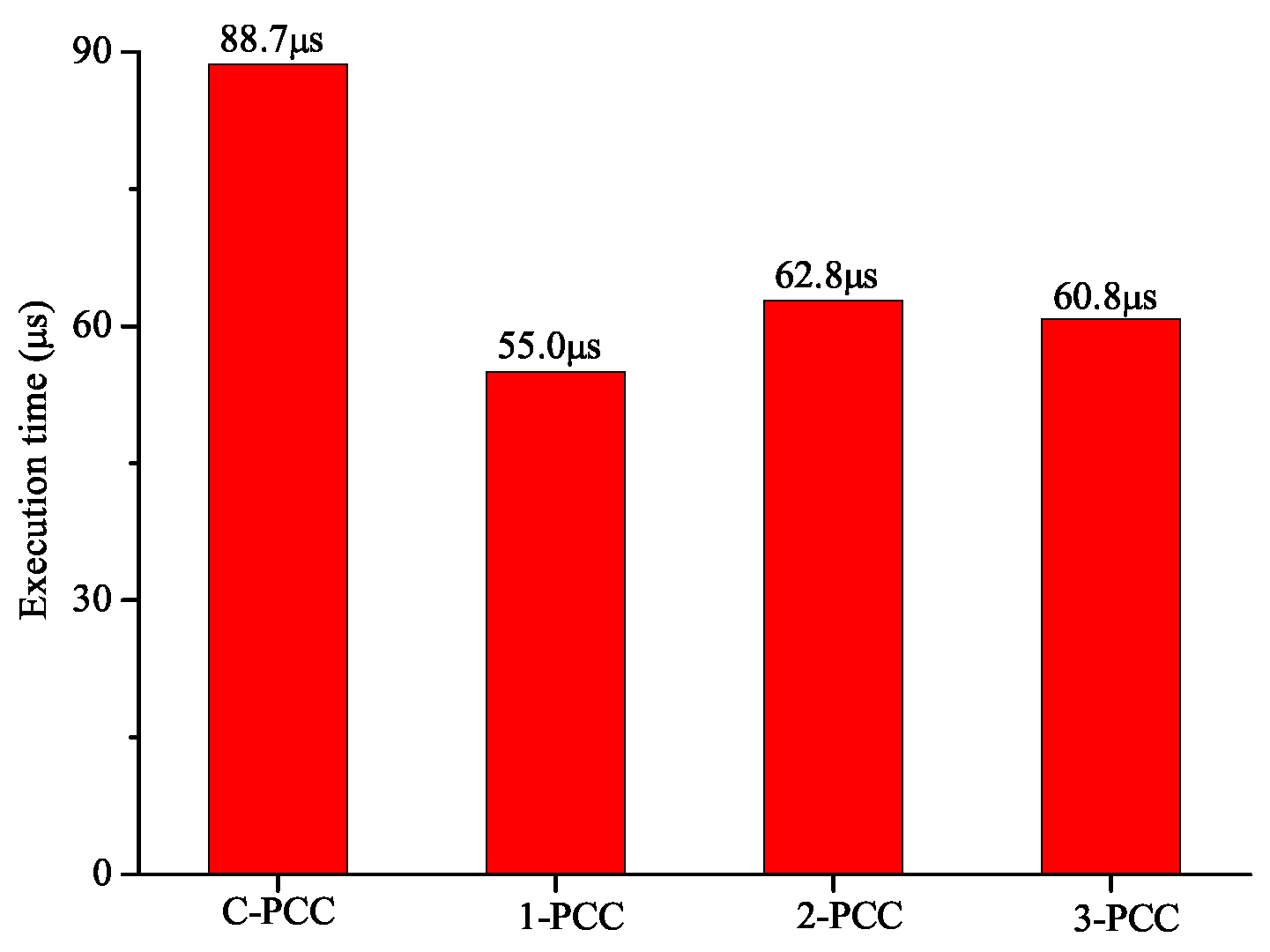
The execution duration of PCC has important influence on its output capability. The conventional predictive current controller is based on an enumerated search strategy causing a high computation time. As shown in
Figure 13, the execution time of C-PCC is 88.7
s, followed by 62.8
s for 2-PCC and 60.8
s for 3-PCC. 1-PCC takes the minimum computing time as it does not include the pulse modulator comparing with 2-PCC and 3-PCC. Therefore, the proposed calculation frame has advantage in alleviating computational burden.
Figure 14a,b,
Figure 15a,b,
Figure 16a,b,
Figure 17a,b and
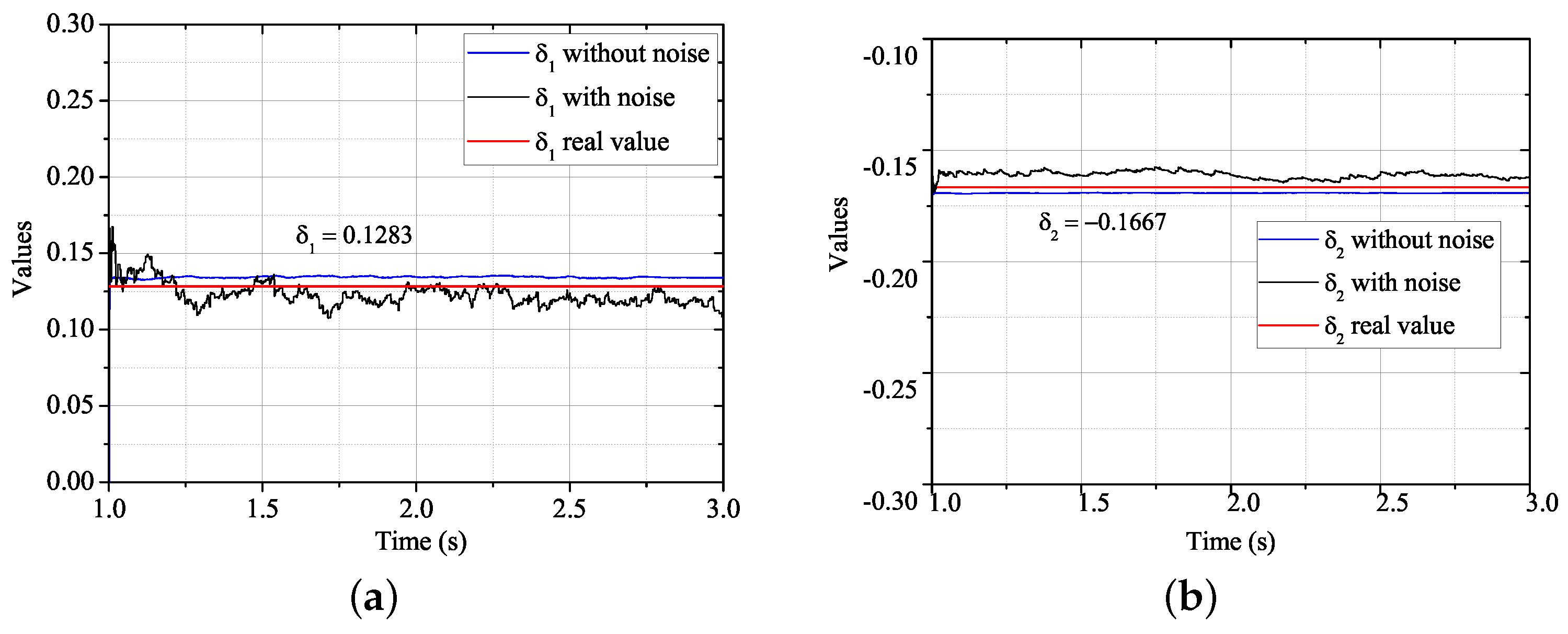
Figure 18a,b show the performance of the proposed integrated identification algorithm. Estimated values of
and
are shown in
Figure 14a,b, respectively. It can be seen that both estimated values in ideal environment have high steady-state accuracy of less than 5% error rates under the wave rate
. However, when they are faced with noise condition, the results show small fluctuation and slight deviation from the actual values. When the termination parameter was set as
, the final results are
. Compared with the actual values
and
, the error rates are 5.3% and 2.9%, respectively.
The estimated results are the coefficients of planes in
Figure 15a,b, which show the original data in different condition of
d-axis current, voltage, and lumped predictive current error caused by
and
. The left figure indicates that signals were sampled without the disturbance of noise, thus the data are almost located in the estimated plane, while some points deviate from estimated plane in the noisy environment.
Similarly,
Figure 16a,b presents the identification process of Case 2. The ideal results also show an opposite steady-state error because of the deviation of
d-axis current by the out-of-step rotor position signal. Estimated values in noise condition fluctuate in an allowable range
, with
and
, independently. The real values are
, thus the identification error rates are 2.7% and 2.3%, respectively.
Figure 17a,b shows the original data of
d-axis current error equation in Case 2, which have the same results in
Figure 15a,b.
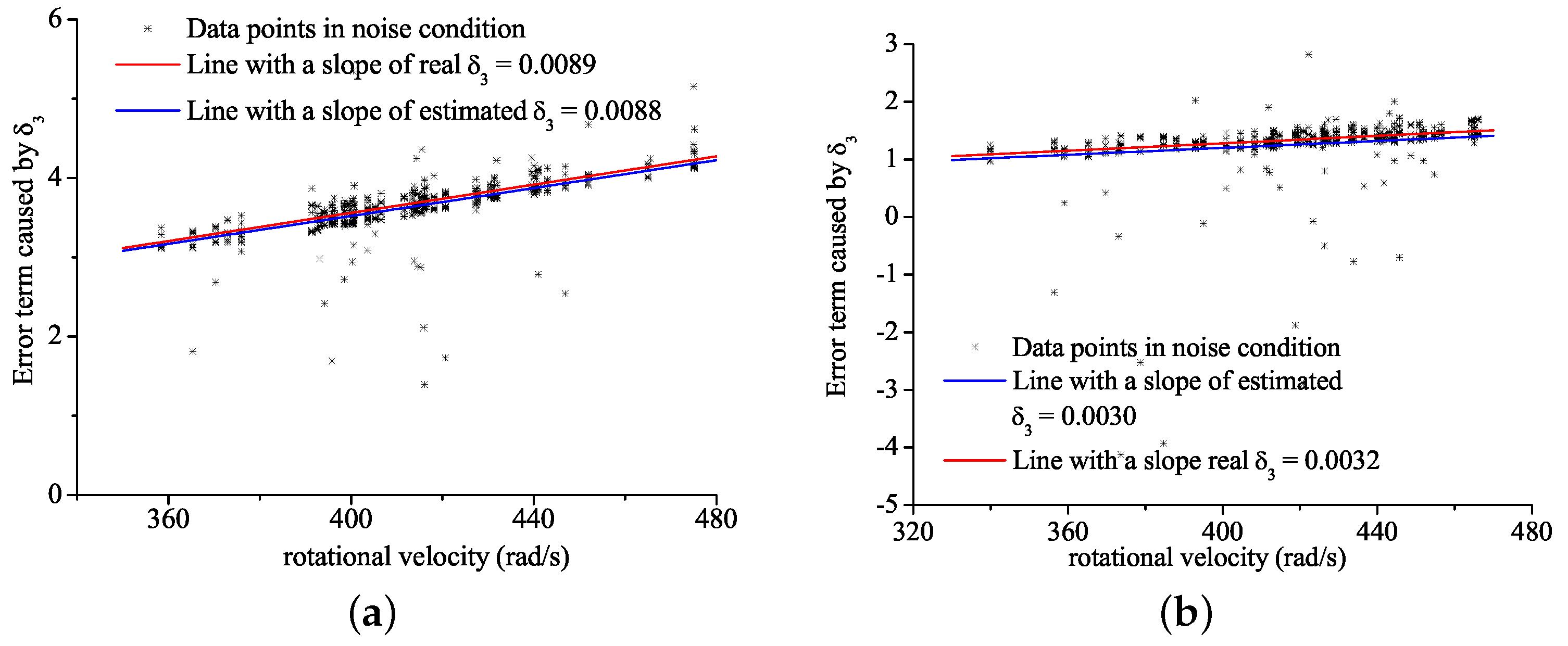
After identifying the first two error factors, the motor is running at near constant velocity, and the
q-axis signals are recorded online. The third error factor can be directly derived based on enough data during a short time in a simple linear regressive method. The slopes of the blue lines in
Figure 18a,b represent estimated results of the third error factor
in noise condition of Cases 1 and 2, respectively. The estimated value of
equals 0.0088 in Case 1, which achieves a satisfactory accuracy comparing with the real value of 0.0089. In Case 2, the result also has a high precision with estimation of 0.0030 compare to the real value of 0.0032.
The results of identification are fed to the PMSM’s model online to enhance the accuracy of predictive model. For instance, when the PMSM system was operated in the direct predictive current control (1-PCC) scheme, the nominal parameters took that of Case 1. In
Figure 19a,b, before identification is finished, each predictive current in
-axis presents a biggish error. However, errors of predictive
-axis current are both substantially decreased after the feedback of the previous three estimated values at instant 1.7 s. As shown in
Figure 20a, the magnitude of
d-axis current error in whole frequency range is highly decreased, which is also shown for the error of
q-axis current in
Figure 20b. On the other hand, the fall of power spectral density (PSD) of errors of predictive current with noise shown in
Figure 21a,b further verifies that identification and compensation are able to enhance the efficiency of electric drive system.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}