The results obtained from the application of the developed control techniques are evaluated via the percent Normalised Sum of Squared Error (
) performance index in the form of Equation (
20):
with
being the sampled reference or set-point
, whilst
is the sampled continuous-time signal representing the generic controlled output
of the process. In particular, this signal is represented by the wind turbine generator angular velocity
in Equation (
2), and the hydraulic turbine rotational speed
n in Equation (
3) for the hydroelectric plant.
4.1. Control Technique Performances and Comparisons
This section reports the results achieved from the application of the control techniques and the tools summarised in
Section 3 to the wind turbine and the hydroelectric simulators recalled in
Section 2.
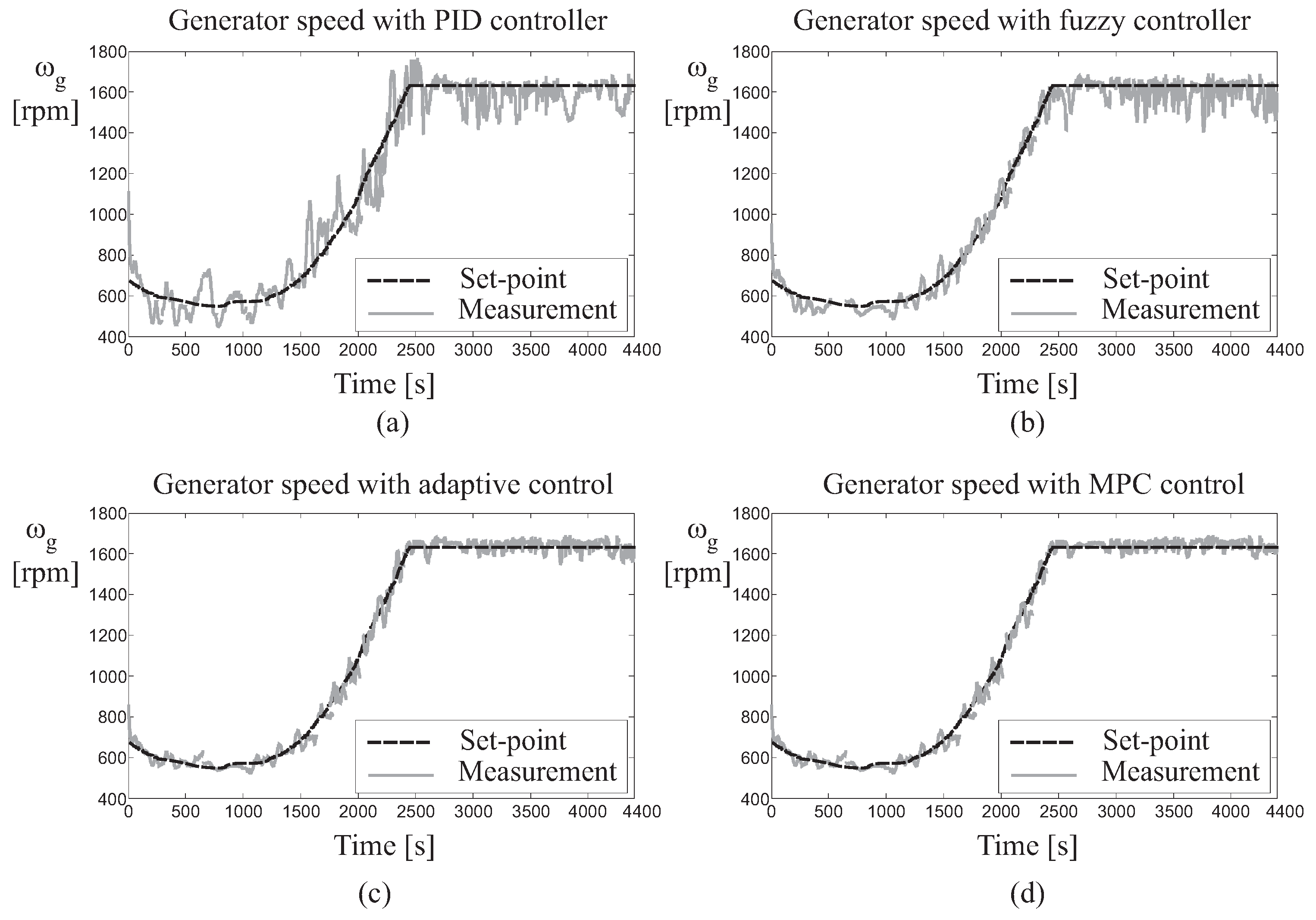
In particular,
Figure 9 depicts the wind turbine generator angular velocity
when the wind speed
changes from 3 m/s to 18 m/s for a simulation time of 4400 s [
6].
With reference to
Figure 9a, the parameters of the PID regulator of Equation (
5) have been determined using the self-tuning tool available in the Simulink environment. They were settled to
,
, and
. The achieved performances are better than those obtained with the baseline control law developed in [
6].
Moreover,
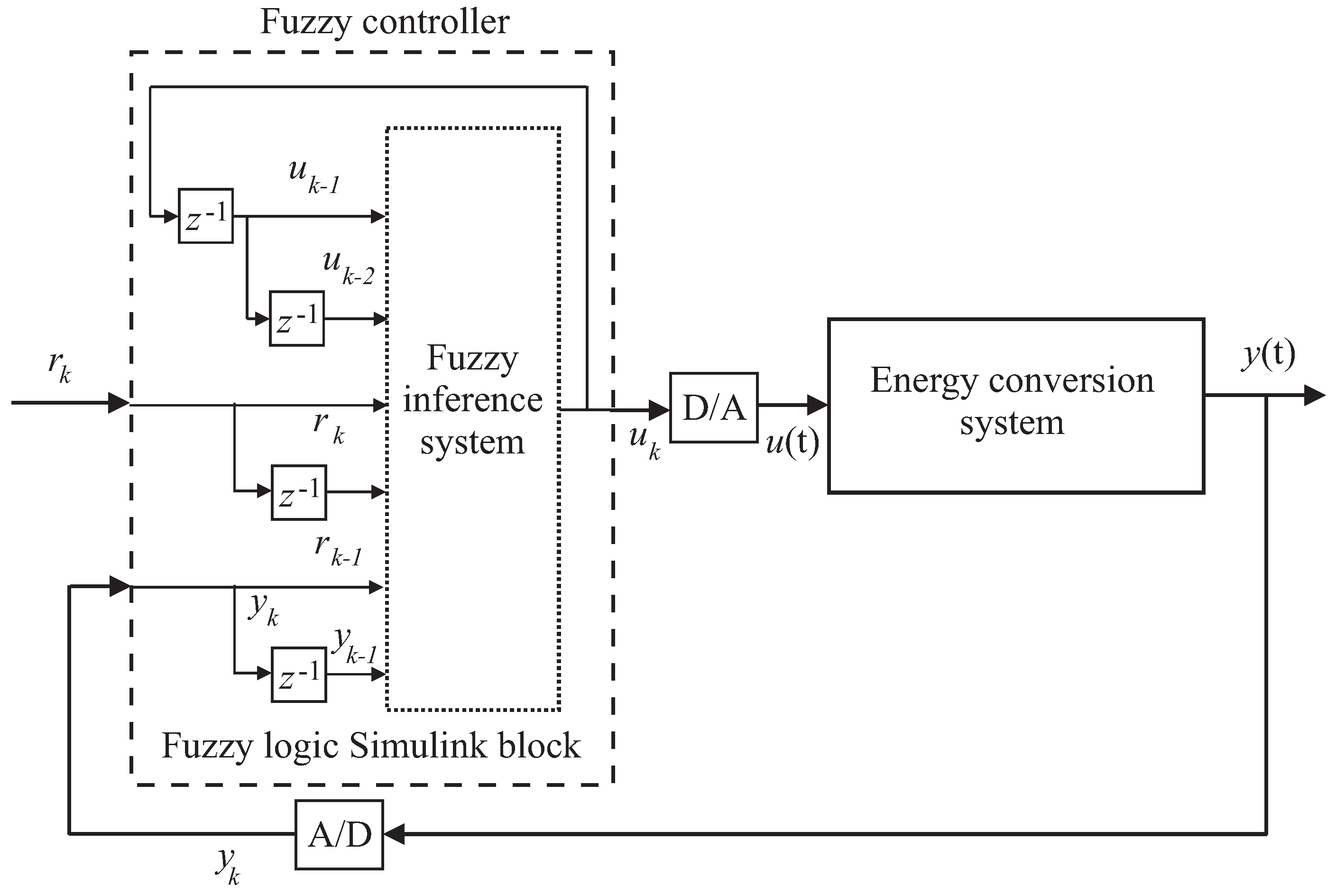
Figure 9b shows the simulations achieved with the data-driven fuzzy identification approach of
Section 3.2. A sampling interval
T = 0.01 s has been exploited, and the TS fuzzy controller of Equation (
8) has been obtained for a number
of Gaussian membership functions, and a number
of delayed inputs and output. Therefore, the antecedent vector in Equation (
7) is
. Both the data-driven FMID and ANFIS tools available in the Matlab and Simulink environments provide also the identification of the shapes of the fuzzy membership functions
of the fuzzy sets
in Equation (
6).
On the other hand,
Figure 9c shows the capabilities of the adaptive controller of Equation (
10). The time-varying parameters of this data-driven control technique summarised in
Section 3.3 have been computed online via the relations of Equation (
11) with the damping factor and the natural frequency variables
in Equation (
13).
Finally,
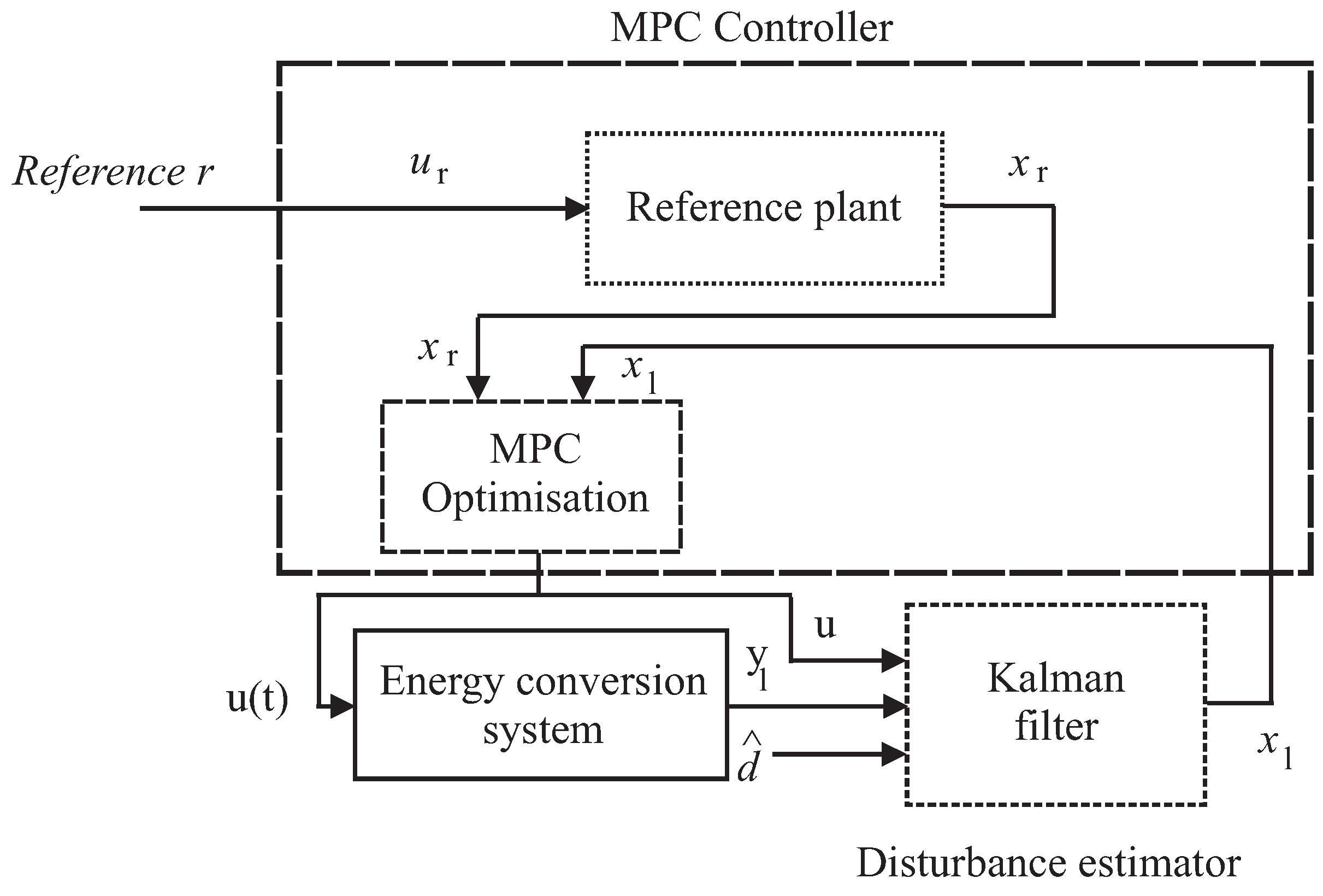
Figure 9d highlights the results achieved with the MPC technique illustrated in
Section 3.4. A state-space model with
in Equation (
2) of the wind turbine nonlinear system is exploited to design the MPC and the Kalman filter for the estimation of the disturbance, with a prediction horizon
and a control horizon
. The weighting factors have been settled to
and
, in order to reduce possible abrupt changes of the control input. In this case, the MPC technique has led to the best results, since it exploits a disturbance decoupling strategy, whilst its parameters have been iteratively adapted in the Simulink environment in order to optimise the MPC cost function of Equation (
16), as addressed in
Section 3.4.
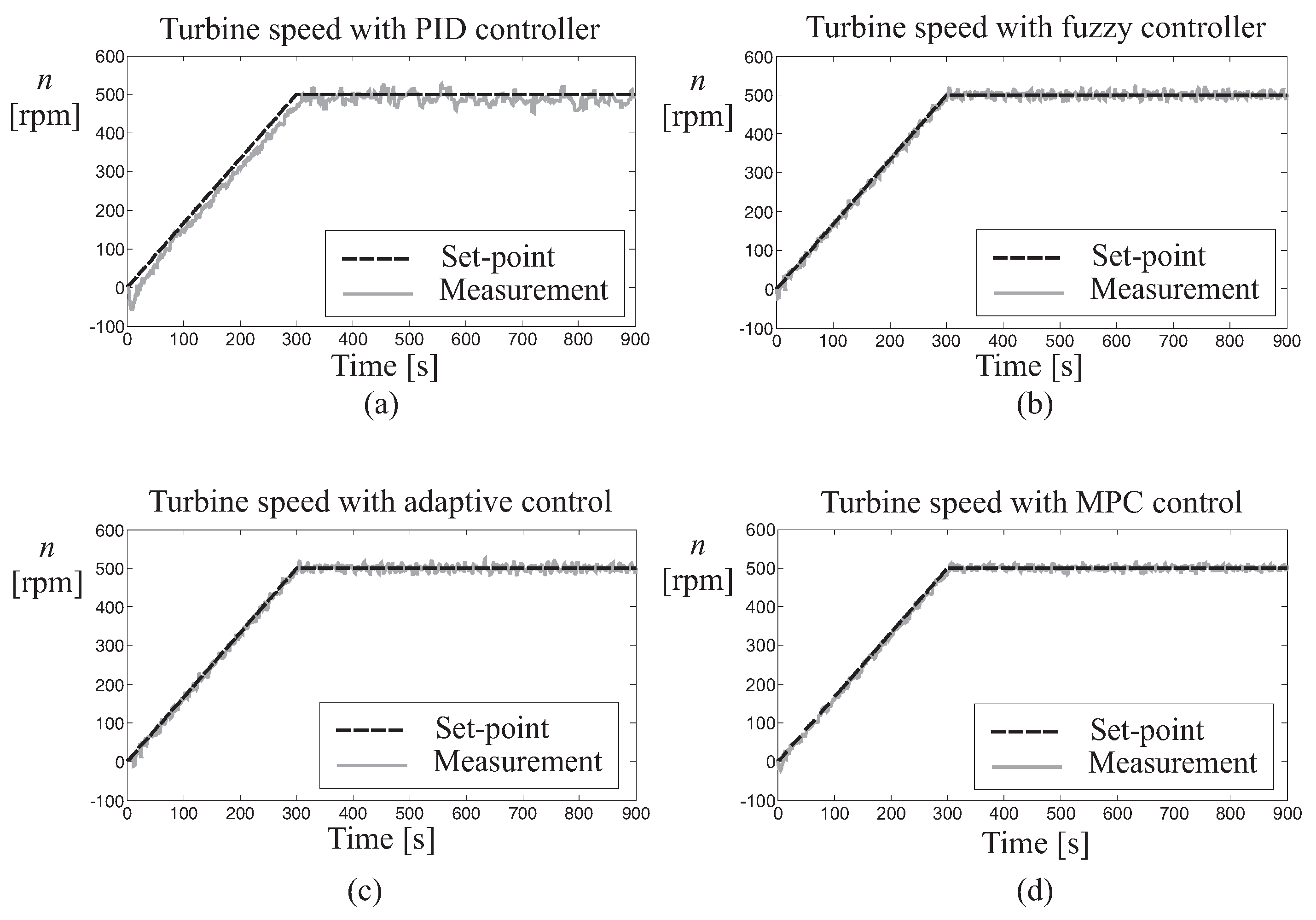
The second test case concerns the hydroelectric plant simulator, where the hydraulic system with its turbine speed governor generates hydraulic transients due to the load changes. In order to consider operating situations similar to those of the wind turbine benchmark, the capabilities of the considered control techniques applied to the hydroelectric simulator have been evaluated during the start-up to full load maneuvers. To this end, an increasing load torque has been imposed during the start-up to full load phase, which is assumed to last 300 s, because of the large size of the considered Francis turbine, and for a simulation of 900 s.
Under these assumptions,
Figure 10 summarises the results achieved with the application of the control strategies recalled in
Section 3. In particular, for all cases,
Figure 10 highlights that the hydraulic turbine angular velocity
n increases with the load torque
during the start-up to full working condition maneuver.
In more detail,
Figure 10a shows the performance of the PID regulator whose parameters are determined via the self-tuning procedure recalled in
Section 3.1. Furthermore,
Figure 10a shows that the PID governor with self-tuning capabilities is able to keep the hydraulic turbine rotational speed error
null (
, i.e., the rotational speed constant) in steady-state conditions.
Figure 10b reports the results of the TS fuzzy controller of Equation (
8). This fuzzy controller was implemented for a sampling interval
T = 0.1 s, with
Gaussian membership functions, and
delayed inputs and output. Therefore, the antecedent vector exploited by the relation of Equation (
7) is
. Moreover, as recalled in
Section 3.2, the data-driven FMID and ANFIS tools implemented in the Simulink toolboxes are able to provide the estimates of the shapes of the membership functions
used in Equation (
8).
On the other hand,
Figure 10c reports the simulations obtained via the data-driven adaptive controller of Equation (
10), whose time-varying parameters are computed by means of the relations of Equation (
11). The damping factor and the natural frequency parameters used in Equation (
13) were fixed to
. The STCSL tool recalled in
Section 3.3 implements this data-driven adaptive technique using the online identification of the input–output model of Equation (
9) [
23].
Finally, regarding the MPC technique with disturbance decoupling proposed in
Section 3.4,
Figure 10d reports the simulations obtained using a prediction horizon
and a control horizon
. In addition, in this case, the weighting parameters have been fixed to
and
, in order to limit fast variations of the control input, as it will be remarked in the following. Furthermore, the MPC design was performed using a linear state-space model of order
for the nonlinear hydroelectric plant simulator of Equation (
3).
In order to provide a quantitative comparison of the tracking capabilities obtained by the considered control techniques for the wind turbine benchmark,
Table 1 summarises the achieved results in terms of
index.
In particular, the
values in
Table 1 highlight that the fuzzy controllers lead to better performances than the PID regulators with self-tuning features. This is motivated by the flexibility and the generalisation capabilities of the fuzzy tool, and in particular the FMID toolbox proposed in [
22]. Better results are obtained by means of the adaptive solution, due to its inherent adaptation mechanism, which allows for tracking the reference signal in the different working conditions of the wind turbine process. However, the MPC technique with disturbance decoupling has achieved the best results, as reported in
Table 1, since it is able to optimise the overall control law over the operating conditions of the system, by taking into account future operating situations of its behaviour, while compensating the disturbance effects.
On the other hand, the results achieved by the application of the considered control techniques to the hydroelectric plant simulator are summarised in
Table 2.
In this case, the values of the
index are evaluated for the considered conditions of varying load torque
from the plant start-up to the full load maneuver. According to these results, good properties of the proposed self-tuning PID regulator are obtained, and they are better than the baseline PID governor with fixed gains developed in [
19]. In fact, the self-tuning design feature of the Simulink environment is able to limit the effect of high-gains for the proportional and the integral contributions of the standard PID control law. On the other hand, the data-driven fuzzy regulator has led to even better results, which are outperformed by the adaptive solution. However, also for the case of the hydroelectric plant simulator, the best performances are obtained by means of the MPC strategy with disturbance decoupling.
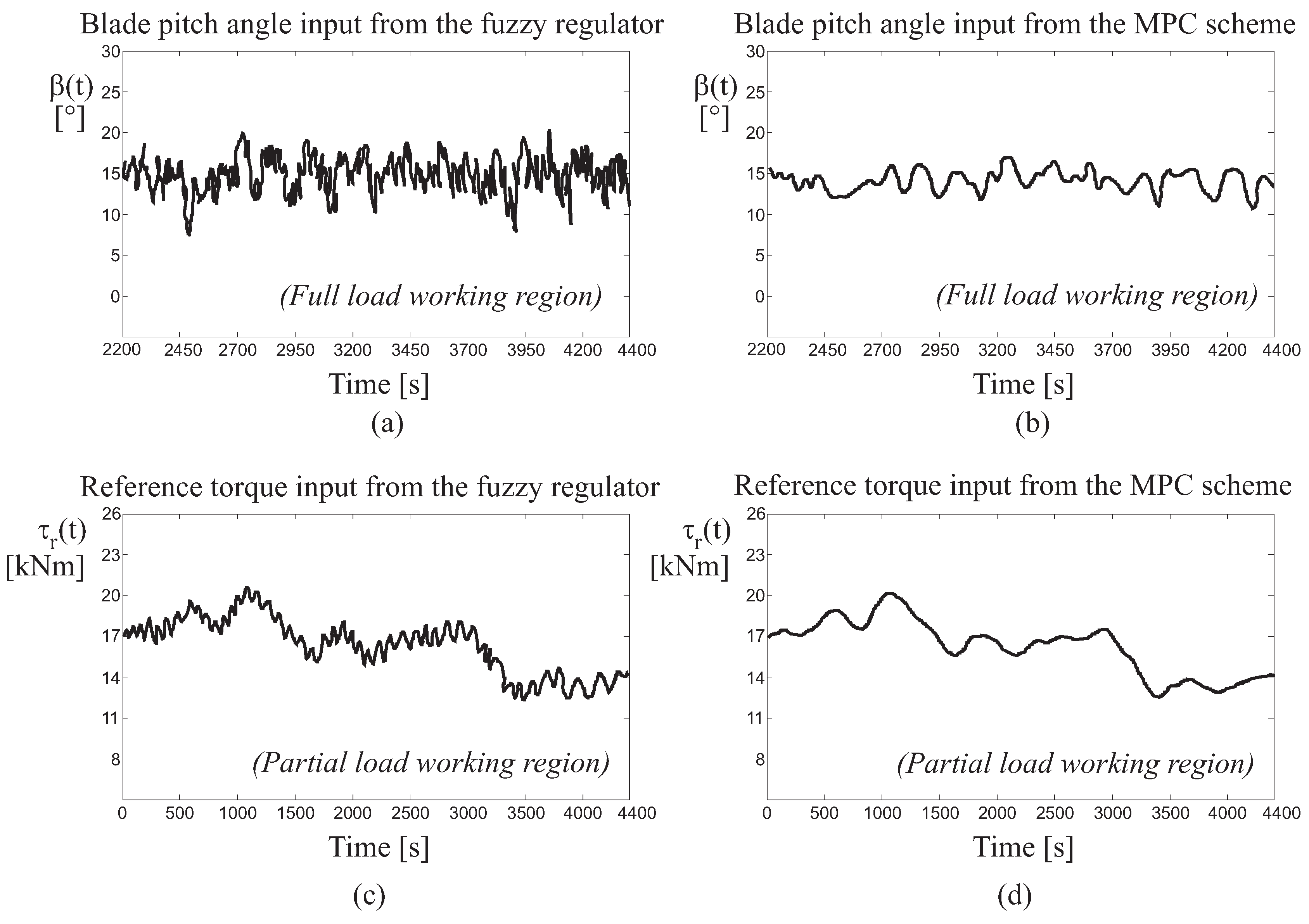
Finally, in order to highlight some further characteristics of the developed control strategies, the actuated inputs
and
feeding the wind turbine system are depicted in
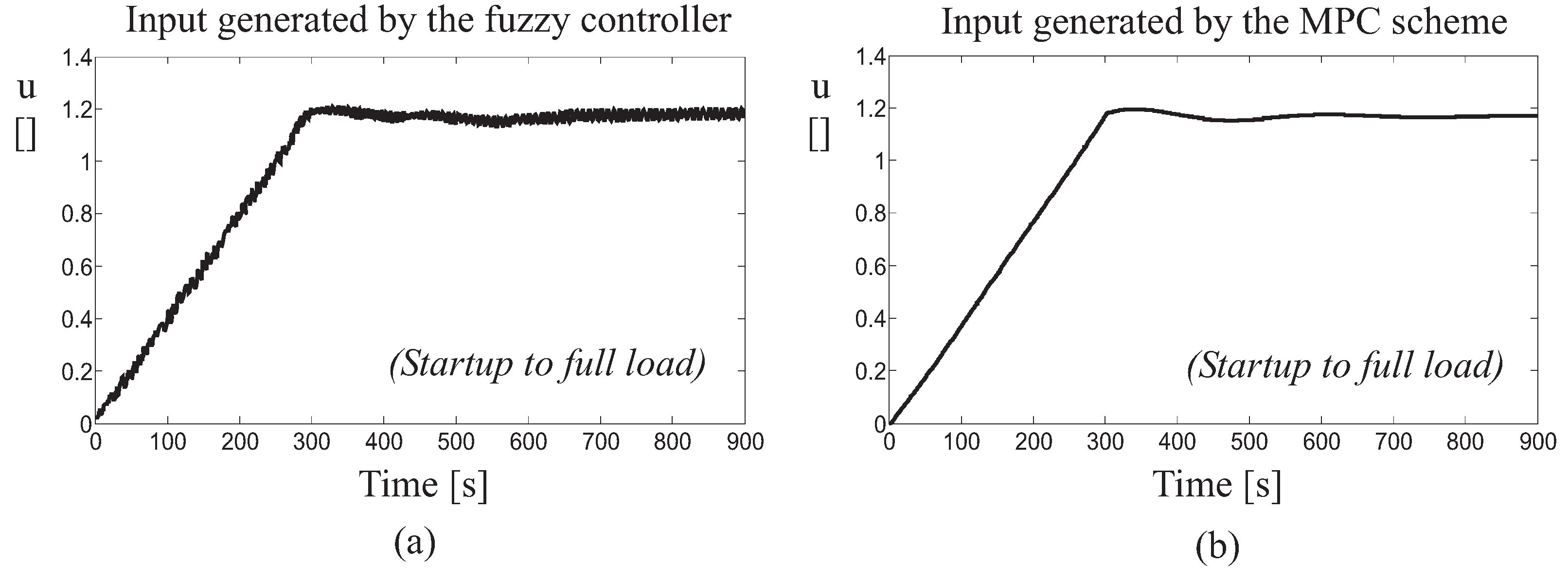
Figure 11, i.e., the blade pitch angle and the generator reference torque. On the other hand,
Figure 12 depicts the control input
u of the hydraulic turbine of the hydroelectric plant. For the sake of brevity, only the results for the data-driven fuzzy controller and the MPC with disturbance decoupling have been reported.
By considering these control inputs, with reference to the data-driven methodologies, and in particular to the design of the fuzzy controllers, offline optimisation strategies allow to reach quite good results. However, control inputs are subjected to faster variations, as shown in
Figure 11a,c, and
Figure 12a. Other control techniques take advantage of more complicated and not direct design methodologies, as highlighted by the MPC scheme. In this case, due to the input constraint, its changes are reduced, as shown in
Figure 11b,d, and
Figure 12b. This feature is attractive for wind turbine systems, where variations of the control inputs must be reduced. This represents another important benefit of MPC with disturbance decoupling, which integrates the advantages of the classic MPC scheme with disturbance compensation capabilities. Therefore, with reference to these two control methods, they can appear rather straightforward, even if further optimisation and estimation strategies have to be applied.
4.2. Sensitivity Analysis
This section analyses the reliability and robustness properties of the developed controllers when the simulations include parameter variations and measurement errors. This further investigation exploits the Monte Carlo tool, since the control behaviour and the tracking capabilities depend on both the model-reality mismatch effects and the input–output error levels. Therefore, this analysis has been implemented by describing the parameters of both the wind turbine system and hydroelectric plant models as Gaussian stochastic processes. Their average values corresponding to the nominal ones are summarised in
Table 3 for the wind turbine benchmark.
Moreover,
Table 3 shows that these model parameters have standard deviations of
of the corresponding nominal values [
6].
On the other hand,
Table 4 reports the hydroelectric simulator model variables with their nominal values varied by
in order to execute the same Monte Carlo analysis [
7].
Therefore, the average values of
index have been thus evaluated by means of 1000 Monte Carlo simulations. They have been reported in
Table 5 and
Table 6 for the wind turbine benchmark and the hydroelectric plant simulator, respectively.
It is worth noting that the results summarised in
Table 5 and
Table 6 serve to assess the overall behaviour of the developed control techniques. In more detail, the values of the
index highlights that when the mathematical description of the controlled dynamic processes may be included in the control design phase, the MPC technique with disturbance decoupling still yields to the best performances, even if an optimisation procedure is required. However, when modelling errors are present, the offline learning feature of the data-driven fuzzy regulators allows for achieving better results than model-based schemes. For example, this consideration is valid for the PID controllers derived via the self-tuning procedure. On the other hand, fuzzy controllers have led to interesting tracking capabilities. With reference to the adaptive scheme, it takes advantage of its recursive features, since it is able to track possible variations of the controlled systems, due to operation or model changes. However, it requires quite complicated and not straightforward design procedures relying on data-driven recursive algorithms. Therefore, fuzzy-based schemes use the learning accumulated from data-driven offline simulations, but the training stage can be computationally heavy. Finally, concerning the standard PID control strategy, which represented the baseline regulator for the considered processes, it is rather simple and straightforward. Obviously, the achievable performances are quite limited when applied to nonlinear dynamic processes. It can thus be concluded that the proposed data-driven self-tuning approaches seem to represent powerful techniques able to cope with uncertainty, disturbance and variable working conditions. The plant simulators, the control solutions, and the data exploited for the analysis addressed in this paper are directly and freely available from the authors.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}