Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter

 ,
, 
 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
- We propose Fuzzy-Logic Based PI (F-PI) and Fuzzy-Logic based Sliding Mode Controllers (F-SMC) for DC-link voltage control.
- A Proportional Resonant (PR) with Resonant Harmonic Compensator (RHC) is designed as a current controller for the STGT PV inverter.
- The current controller is designed with and without feedforward PV power loop to improve dynamics and control.
- A superior SOGI-based PLL is employed that has a fast-dynamic response, fast-tracking accuracy, and harmonic immunity.
- A comparative assessment of the designed controllers with a well-tuned conventional PI controller on the bases of oscillation, overshoot, undershoot, rise time, settling time, etc.
- The Total Harmonic Distortion calculation of a periodic grid voltage and grid current based on discrete samples using the PLECS library.
- Performance index calculation and assessment, i.e., Integral Square Error (ISE), and Integral Absolute Error (IAE) to evaluate the performance of the design controllers.
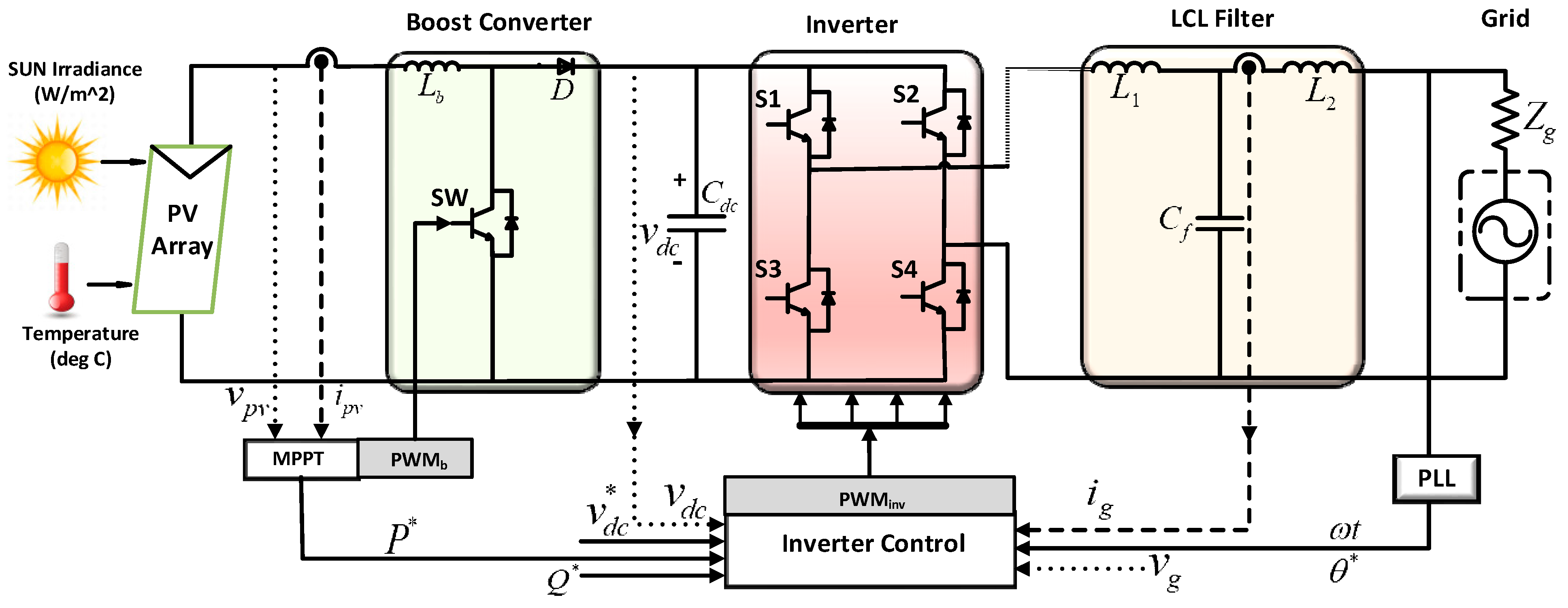
2. Proposed System Design
2.1. DC-DC Converter
2.2. DC-AC Inverter
3. Control of Transformerless PV Inverter
3.1. Control Loop Design
3.2. Second Order Generalized Integrator (SOGI) PLL Design
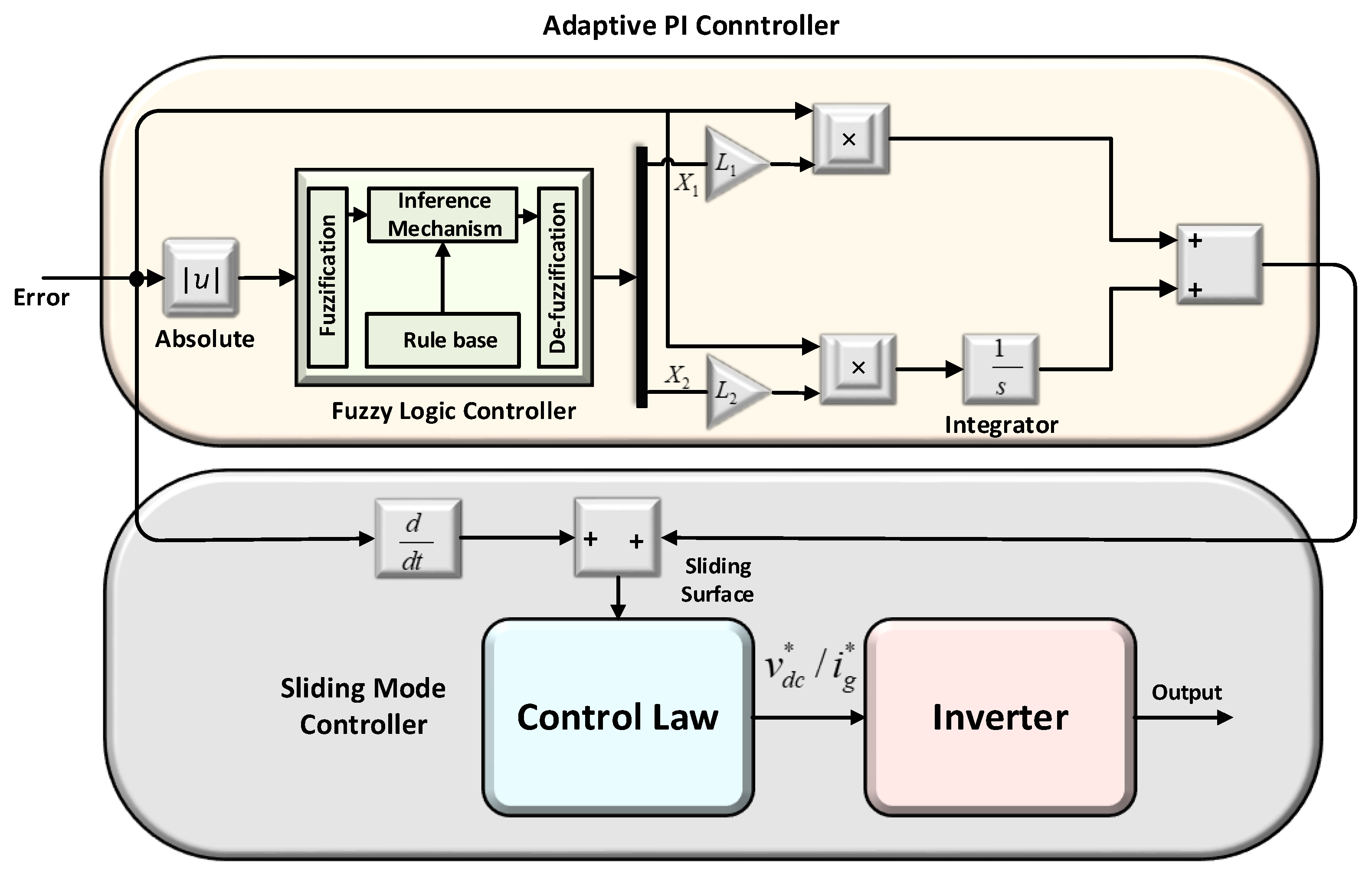
4. Proposed Adaptive Controllers
4.1. Proposed Fuzzy-PI Controller
4.1.1. Fuzzy Controller Architecture
4.1.2. Design of Fuzzy-PI Controller
- (1)
- If the error absolute is zero, then is large and is small.
- (2)
- If the error absolute is small, then is large and is zero.
- (3)
- If the error absolute is large, then is large and is large.
4.2. Design of Fuzzy-Sliding Mode Controller
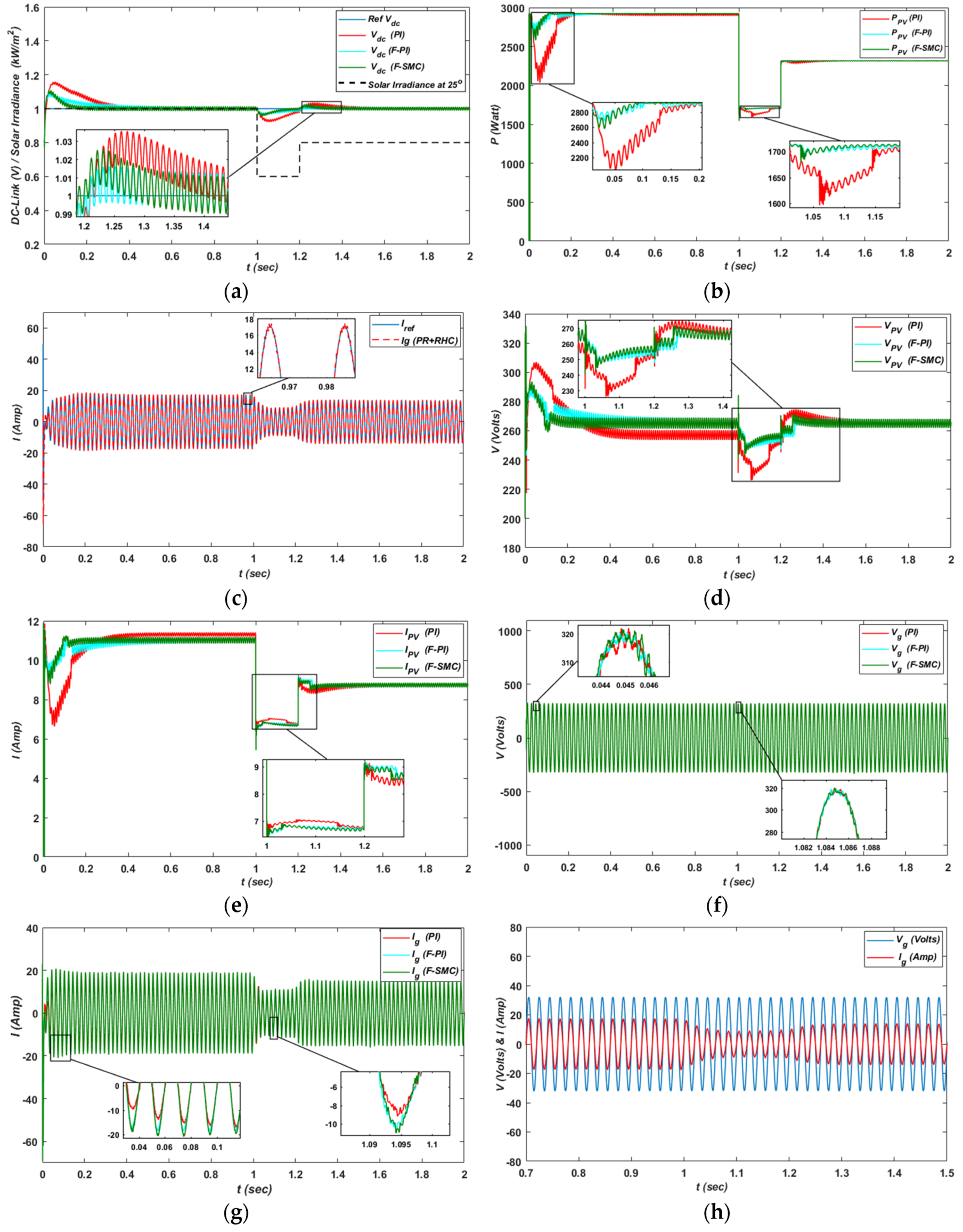
5. Results and Discussion
5.1. Case I: Without Feedforward Loop of PV Power
5.2. Case II: With Feedforward Loop of PV Power
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Nominal power (1000 kW/m2, 25 °C) | = 65 W |
| Short circuit current | = 3.99 A |
| Short circuit voltage | = 21.7 V |
| Current at MPPT | = 3.69 A |
| Voltage at MPPT | = 17.6 V |
| Control Strategies | Parameter | Values |
|---|---|---|
| Without feedforward loop of PV power | ||
| PI | 32 × 400 | |
| 280 × 400 | ||
| F-PI | 110 | |
| 1080 | ||
| F-SMC | 280 | |
| 2980 | ||
| 150 | ||
| With feedforward loop of PV power | ||
| PI | 32 × 400 | |
| 280 × 400 | ||
| F-PI | 110 | |
| 1080 | ||
| F-SMC | 280 | |
| 2980 | ||
| 150 | ||
| PR + RHC | 22 | |
| 2000 | ||
| 3rd harmonics compensation | 1200 | |
| 5th harmonics compensation | 800 | |
| 7th harmonics compensation | 200 | |
References
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F.; Wang, H. Benchmarking of constant power generation strategies for single-phase grid-connected photovoltaic systems. IEEE Trans. Ind. Appl. 2018, 54, 447–457. [Google Scholar] [CrossRef]
- Zeb, K.; Uddin, W.; Khan, M.A.; Ali, Z.; Ali, M.U.; Christofides, N.; Kim, H.J. A Comprehensive Review on Inverter Topologies and Control Strategies for Grid Connected Photovoltaic System. Renew. Sustain. Energy Rev. 2018, 94, 1120–1141. [Google Scholar] [CrossRef]
- SolarPower Europe. Global Market Outlook for Solar Power 2015–2019. 2014. Available online: https: //helapco.gr/pdf/Global_Market_Outlook_2015_-2019_lr_v23.pdf (accessed on 24 July 2018).
- Zeb, K.; Khan, I.; Uddin, W. A Review on Recent Advances and Future Trends of Transformerless Inverter Structures for Single-Phase Grid-Connected Photovoltaic Systems. Energies 2018, 11, 1968. [Google Scholar] [CrossRef]
- Fraunhofer, I.S.E. Recent Facts about Photovoltaics in Germany. 19 May 2015. Available online: http://www.pv-fakten.de/ (accessed on 19 February 2019).
- Garnica Lopez, M.A.; Garcia de Vicuna, J.L.; Miret, J.; Castilla, M.; Guzmán, R. Control strategy for grid-connected three-phase inverters during voltage sags to meet grid codes and to maximize power delivery capability. IEEE Trans. Power Electron. 2018, 33, 9360–9374. [Google Scholar] [CrossRef]
- Islam, S.U.; Zeb, K.; Din, W.U.; Khan, I.; Ishfaq, M.; Hussain, A.; Busarello, T.D.C.; Kim, H.J. Design of Robust Fuzzy Logic Controller Based on the Levenberg Marquardt Algorithm and Fault Ride Trough Strategies for a Grid-Connected PV System. Electronics 2019, 8, 429. [Google Scholar] [CrossRef]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-connected photovoltaic systems: An overview of recent research and emerging PV converter technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Guerrero, J.M.; Cheriti, A.; Bouhamida, M.; Sicard, P.; Benghanem, M.A. Survey on control of electric power distributed generation systems for microgrid applications. Renew. Sustain. Energy Rev. 2015, 44, 751–766. [Google Scholar] [CrossRef]
- Eren, S.; Pahlevani, M.; Bakhshai, A.; Jain, P. An adaptive droop DC-bus voltage controller for a grid-connected voltage source inverter with LCL filter. IEEE Trans. Power Electron. 2015, 30, 547–560. [Google Scholar] [CrossRef]
- Raoufat, M.E.; Khayatian, A.; Mojallal, A. Performance Recovery of Voltage Source Converters with Application to Grid-Connected Fuel Cell DGs. IEEE Trans. Smart Grid 2018, 9, 1197–1204. [Google Scholar] [CrossRef]
- Ortega, M.; Hernández, J.; García, O. Measurement and assessment of power quality characteristics for photovoltaic systems: Harmonics, flicker, unbalance, and slow voltage variations. Electr. Power Syst. Res. 2013, 96, 23–35. [Google Scholar] [CrossRef]
- Barater, D.; Lorenzani, C.; Franceschini, G.; Franceschini, G.; Buticchi, G. Recent advances in single-phase transformerless photovoltaic inverters. IET Renew. Power Gener. 2016, 10, 260–273. [Google Scholar] [CrossRef]
- Medina, A.; Hernández, J.C.; Ortega, M.J.; Jurado, F. DC current injection into the network from transformerless and LF transformer photovoltaic inverters. In Proceedings of the 16th International Conference on Harmonics and Quality of Power (ICHQP), Bucharest, Romania, 25–28 May 2014; pp. 234–238. [Google Scholar]
- Yang, Y.; Zhou, K.; Wang, H.; Blaabjerg, F.; Wang, D.; Zhang, B. Frequency adaptive selective harmonic control for grid-connected inverters. IEEE Trans. Power Electron. 2015, 30, 3912–3924. [Google Scholar] [CrossRef]
- Rashed, M.; Klumpner, C.; Asher, G. Repetitive and resonant control for a single-phase grid-connected hybrid cascaded multilevel converter. IEEE Trans. Power Electron. 2013, 28, 2224–2234. [Google Scholar] [CrossRef]
- Xie, C.; Zhao, X.; Savaghebi, M.; Meng, L.; Guerrero, J.M.; Vasquez, J.C. Multirate fractional-order repetitive control of shunt active power filter suitable for microgrid applications. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 5, 809–819. [Google Scholar] [CrossRef]
- Lidozzi, A.; Ji, C.; Solero, L.; Zanchetta, P.; Crescimbini, F. Resonantrepetitive combined control for stand-alone power supply units. IEEE Trans. Ind. Appl. 2015, 51, 4653–4663. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D.; Zhou, K. High-performance grid simulator using parallel structure fractional repetitive control. IEEE Trans. Power Electron. 2016, 31, 2669–2679. [Google Scholar] [CrossRef]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding-mode control of PWM dual inverter based grid-connected PV system: Modeling and performance analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 435–444. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A new feedback method for PR current control of LCL-filter-based grid-connected inverter. IEEE Trans. Ind. Electron. 2010, 57, 2033–2041. [Google Scholar] [CrossRef]
- Khajehoddin, S.A.; Karimi-Ghartemani, M.; Jain, P.K.; Bakhshai, A. A resonant controller with high structural robustness for fixed-point digital implementations. IEEE Trans. Power Electron. 2012, 27, 3352–3362. [Google Scholar] [CrossRef]
- Jinwei, H.; Yun, L.W.; Munir, M.S. A flexible harmonic control approach through voltage-controlled DG–Grid interfacing converters. IEEE Trans. Ind. Electron. 2012, 59, 444–455. [Google Scholar]
- Yepes, A.G.; Freijedo, F.D.; Lopez, O.; Doval-Gandoy, J. High performance digital resonant controllers implemented with two integrators. IEEE Trans. Power Electron. 2011, 26, 563–576. [Google Scholar] [CrossRef]
- Davoodnezhad, R.; Holmes, D.G.; McGrath, B.P. A fully digital hysteresis current controller for current regulation of grid connected pv inverters. In Proceedings of the 2014 IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014; pp. 1–8. [Google Scholar]
- Wu, F.; Sun, B.; Zhao, K.; Sun, L. Analysis and solution of current zero crossing distortion with unipolar hysteresis current control in grid-connected inverter. IEEE Trans. Ind. Electron. 2013, 60, 4450–4457. [Google Scholar] [CrossRef]
- Fuchs, F.; Dannehl, J.; Fuchs, F.W. Discrete sliding mode current control of grid-connected three-phase PWM converters with LCL filter. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 779–785. [Google Scholar]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A sliding-mode controller with multi resonant sliding surface for single-phase grid-connected VSI with an LCL filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Ho, C.N.M.; Cheung, V.S.P.; Chung, H.S.H. Constant-frequency hysteresis current control of grid-connected VSI without bandwidth control. IEEE Trans. Power Electron. 2009, 24, 2484–2495. [Google Scholar] [CrossRef]
- Ahmed, T.; Nishida, K.; Nakaoka, M. Deadbeat current control of LCL-filter for grid connected three-phase voltage source inverter. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems (PEDS), Singapore, 5–8 December 2011; pp. 459–467. [Google Scholar]
- Altin, N.; Sefa, I. dSPACE based adaptive neuro-fuzzy controller of grid interactive inverter. Energy Convers. Manag. 2012, 56, 130–139. [Google Scholar] [CrossRef]
- Sefa, I.; Altin, N.; Ozdemir, S.; Kaplan, O. Fuzzy PI controlled inverter for grid interactive renewable energy systems. IET Renew. Power Gener. 2015, 9, 729–738. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Adaptive control of grid-connected inverters based on online grid impedance measurements. IEEE Trans. Sustain. Energy 2014, 5, 516–523. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. Control of single-phase grid-connected converters with LCL filters using recurrent neural network and conventional control methods. IEEE Trans. Power Electron. 2016, 31, 5354–5364. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ionel, D.M. Renewable Energy Devices and Systems with Simulations in MATLAB and ANSYS; Taylor & Francis: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bae, Y.; Vu, T.-K.; Kim, R.-Y. Implemental control strategy for grid stabilization of grid-connected PV system based on German grid code in symmetrical low-to-medium voltage network. IEEE Trans. Energy Convers. 2013, 28, 619–631. [Google Scholar] [CrossRef]
- Dutta, S.; Debnath, D.; Chatterjee, K. A grid-connected single-phase transformerless inverter controlling two solar PV arrays operating under different atmospheric conditions. IEEE Trans. Ind. Electron. 2018, 65, 374–385. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Blaabjerg, F. Distributed control of PV strings with module integrated converters in presence of a central MPPT. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 1–8. [Google Scholar]
- Maris, T.I.; Kourtesi, S.; Ekonomou, L.; Fotis, G.P. Modeling of a single-phase photovoltaic inverter. Sol. Energy Mater. Sol. Cells 2007, 91, 1713–1725. [Google Scholar] [CrossRef]
- Islam, S.U.; Zeb, K.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Kim, H.J. Design of a Proportional Resonant Controller with Resonant Harmonic Compensator and Fault Ride Trough Strategies for a Grid-Connected Photovoltaic System. Electronics 2018, 7, 451. [Google Scholar] [CrossRef]
- Yang, Y.; Blaabjerg, F.; Wang, H. Low voltage ride-through of single-phase transformerless photovoltaic inverters. IEEE Trans. Ind. Appl. 2014, 50, 1942–1952. [Google Scholar] [CrossRef]
- Yang, Y.; Blaabjerg, F.; Wang, H.; Simões, M.G. Power control flexibilities for grid-connected multi-functional photovoltaic inverters. IET Renew. Power Gener. 2016, 10, 504–513. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yang, Y.; Hadjidemetriou, L.; Blaabjerg, F.; Kyriakides, E. Benchmarking of phase locked loop-based synchronization techniques for grid-connected inverter systems. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 2167–2174. [Google Scholar]
- Fengjiang, W.; Lujie, Z.; Jiandong, D. A New Two-Phase Stationary Frame-Based Enhanced PLL for Three-Phase Grid Synchronization. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 251–255. [Google Scholar]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. A new single-phase PLL structure based on second order generalized integrator. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Yang, Y.; Blaabjerg, F. Synchronization in single-phase grid connected photovoltaic systems under grid faults. In Proceedings of the 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 476–482. [Google Scholar]
- Yang, Y.; Blaabjerg, F.; Zou, Z. Benchmarking of grid fault modes in single-phase grid-connected photovoltaic systems. IEEE Trans. Ind. Appl. 2013, 49, 2167–2176. [Google Scholar] [CrossRef]
- Xiao, F.; Dong, L.; Li, L.; Liao, X. A frequency-fixed SOGI-based PLL for single-phase grid-connected converters. IEEE Trans. Power Electron. 2017, 32, 1713–1719. [Google Scholar] [CrossRef]
- Ishfaq, M.; Uddin, W.; Zeb, K.; Khan, I.; Ul Islam, S.; Adil Khan, M.; Kim, H.J. A New Adaptive Approach to Control Circulating and Output Current of Modular Multilevel Converter. Energies 2019, 12, 1118. [Google Scholar] [CrossRef]
- Khan, I.; Zeb, K.; Din, W.U.; Islam, S.U.; Ishfaq, M.; Hussain, S.; Kim, H.-J. Dynamic Modeling and Robust Controllers Design for Doubly Fed Induction Generator-Based Wind Turbines under Unbalanced Grid Fault Conditions. Energies 2019, 12, 454. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ali, J.A.; Mohamed, A.; Amirulddin, U.A.U.; Tan, N.M.L.; Uddin, M.N. Quantum-Behaved Lightning Search Algorithm to Improve Indirect Field-Oriented Fuzzy-PI Control for IM Drive. IEEE Trans. Ind. Appl. 2018, 54, 3793–3805. [Google Scholar] [CrossRef]
- Zeb, K.; Ayesha; Haider, A.; Uddin, W.; Qureshi, M.B.; Mehmood, C.A.; Jazlan, A.; Sreeram, V. Indirect Vector Control of Induction Motor using Adaptive Sliding Mode Controller. In Proceedings of the IEEE Australian Control Conference (AUCC), Newcastle, NSW, Australia, 3–4 November 2016; pp. 358–363. [Google Scholar]
- Zeb, K.; Ali, Z.; Saleem, K.; Uddin, W.; Javed, M.A.; Christofides, N. Indirect Field-Oriented Control of Induction Motor Drive based on Adaptive Fuzzy Logic Control. Electr. Eng. 2017, 99, 803–815. [Google Scholar] [CrossRef]
- Zeb, K.; Din, W.U.; Khan, M.A.; Khan, A.; Younas, U.; Busarello, T.D.C.; Kim, H.J. Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations. Energies 2018, 11, 2339. [Google Scholar] [CrossRef]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N.; Gaeid, K.S. Adaptive Fuzzy Sliding Mode Control into Chattering Free IM Drive. IEEE Trans. Ind. Appl. 2015, 51, 692–702. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M. Adaptive Dynamic Sliding-Mode Control System Using Recurrent RBFN for High-Performance Induction Motor Servo Drive. IEEE Trans. Ind. Inform. 2013, 9, 1922–1936. [Google Scholar] [CrossRef]







| Parameters | Symbols | Values |
|---|---|---|
| Grid voltage (RMS) | 230 V | |
| Grid Operating Frequency | 314 rad/sec | |
| Boost-converter switching frequency | 20 kHz | |
| Boost Inductance | 2 m | |
| Grid- impedance | , | 0.5 m 0.2 Ω |
| Reference DC-link voltage | 400 V | |
| DC-link voltage capacitance | 2200 F | |
| LCL-Filter | 1.8 mH, 2.35 µF, 1.8 mH | |
| Switching Frequency of Inverter | 10 kHz |
| Input Membership Function | Output Membership Function | IF-THEN Rules | ||||
|---|---|---|---|---|---|---|
| S. No. | Linguistic Terms | Range | Linguistic Terms | Range | IF Input | THEN output () |
| 1 | Zero | [0, 0.2] | Zero | [0, 0.2] | Zero | Zero |
| 2 | Small | [0.3, 0.7] | Small | [0.3, 0.7] | Small | Small |
| 3 | Large | [0.8, 1.0] | Large | [0.8, 1.0] | Large | Large |
| Controllers Designed | DC-Link | Current Controller | Total Harmonic Distortion | |||
|---|---|---|---|---|---|---|
| ISE | IAE | ISE | IAE | |||
| PI | 0.003371 | 0.04815 | 4.202 | 1.0305 | 4.8970 | 6.8970 |
| F-PI | 0.000915 | 0.02761 | 3.698 | 0.7165 | 2.6230 | 2.1940 |
| F-SMC | 0.000769 | 0.02316 | 3.308 | 0.8936 | 3.0980 | 1.5560 |
| Controllers Designed | DC-Link | Current Controller | Total Harmonic Distortion | |||
|---|---|---|---|---|---|---|
| ISE | IAE | ISE | IAE | |||
| PI | 0.000445 | 0.01923 | 3.4570 | 1.0330 | 10.570 | 3.3882 |
| F-PI | 0.000293 | 0.01574 | 2.6340 | 0.7161 | 3.1980 | 1.5520 |
| F-SMC | 0.000232 | 0.01360 | 2.5940 | 0.87109 | 2.9910 | 1.4521 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeb, K.; Islam, S.U.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Ahmad, I.; Kim, H.J. Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter. Electronics 2019, 8, 520. https://doi.org/10.3390/electronics8050520
Zeb K, Islam SU, Din WU, Khan I, Ishfaq M, Busarello TDC, Ahmad I, Kim HJ. Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter. Electronics. 2019; 8(5):520. https://doi.org/10.3390/electronics8050520
Chicago/Turabian StyleZeb, Kamran, Saif Ul Islam, Waqar Ud Din, Imran Khan, Muhammad Ishfaq, Tiago Davi Curi Busarello, Iftikhar Ahmad, and Hee Je Kim. 2019. "Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter" Electronics 8, no. 5: 520. https://doi.org/10.3390/electronics8050520
APA StyleZeb, K., Islam, S. U., Din, W. U., Khan, I., Ishfaq, M., Busarello, T. D. C., Ahmad, I., & Kim, H. J. (2019). Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter. Electronics, 8(5), 520. https://doi.org/10.3390/electronics8050520