4.1. Single-Time Window and Single Service Network
Here, we discuss the first real situation: a single-time window and single service network. This issue explores the network from a user perspective. After the user decides to use a single service, in addition to the overall network reliability, the user will want to know which route arrives at the sink node and has a high degree of reliability among the many routes to the destination. The network model is shown in
Figure 10. This network diagram has a source node, a sink node and four paths (arcs). The user demand is
D = 3.
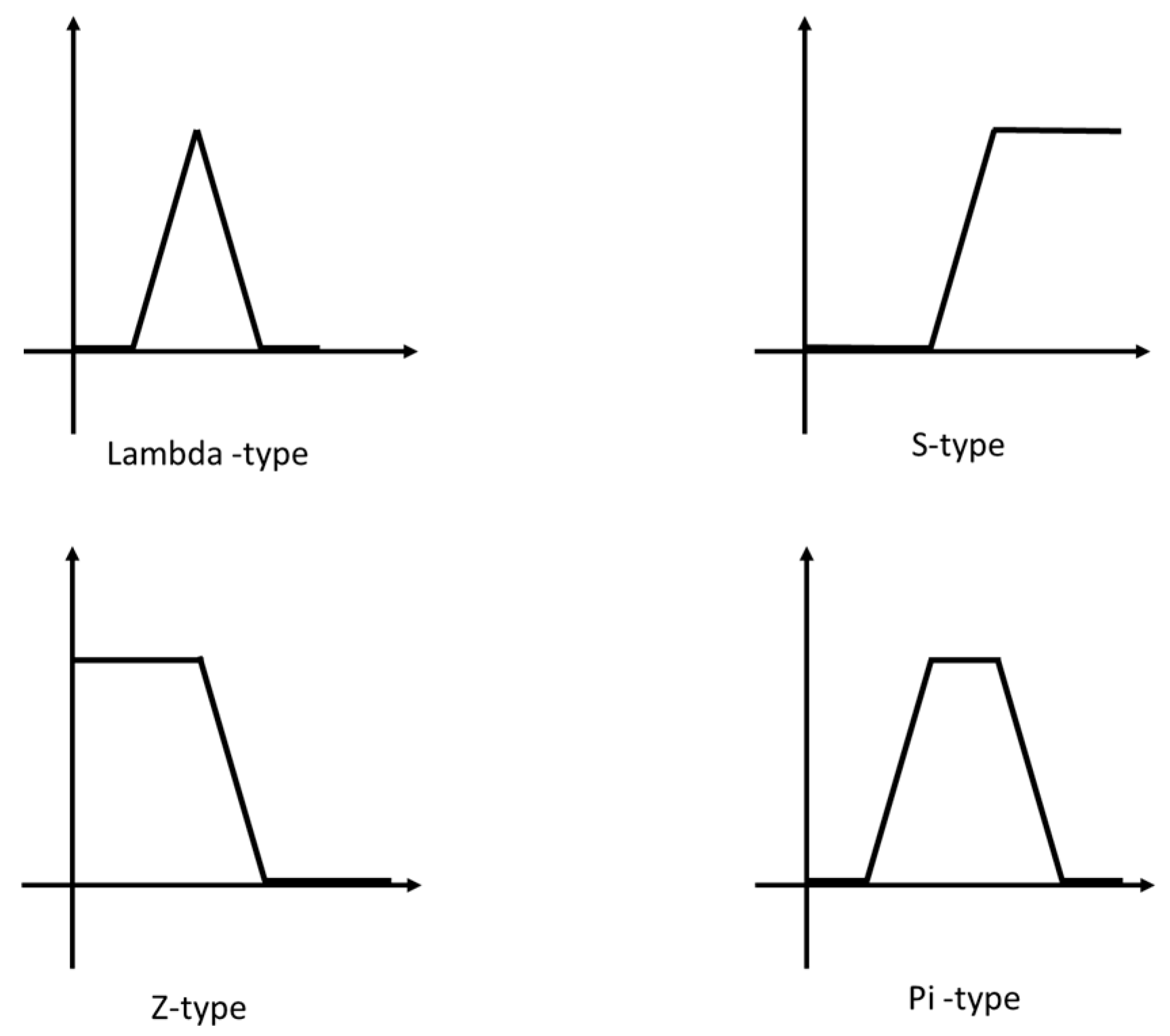
Table 5 shows the upper limit of the transportable capacity of each arc and the corresponding probability value, operation lead time, transit time and commodity ratio. This study developed the fuzzy sets as shown in
Table 6 (fuzzy function value of flow and time for each arc) and
Table 7 (fuzzy function value of reliability for each arc) according to the rule based on the description in
Section 2.2. In order to deal with more complex systems, scholars have developed multi-state fuzzy reliability based on the basis of binary-state fuzzy reliability [
42]. Multi-state fuzzy reliability divides the interval [0,1] into several subintervals and defines fuzzy sets for each degree of interval state, most of which are defined by expert experience. In order to make up for the lack of expert ability, the latter is combined with fuzzy logic and inference [
43], constructing a fuzzy system [
44], which can adjust parameters according to various states, strengthen their learning ability and have a better interpretation of more complex systems.
Step 1. The amount of transport on each path must not exceed the upper limit of transport (
M1,
M2,
M3,
M4) = (3, 4, 3, 3) for each path (arc). For the convenience of representation, let
X = (
x1,2,
x2,4,
x1,3,
x3,4) = (
x11,
x21,
x31,
x41).
This network must meet customer demand
D = 3:
According to the flow conservation theory, the sum of the inflow and outflow of node 2 and node 3 must be the same:
Find all feasible solutions
X1 = (
x11,
x21,
x31,
x41) by the exhaustive method (as shown in
Table 8) through Equations (13)–(20). This process is shown in
Table 8:
Through the exhaustive process, we can obtain the results of the feasible solution, as shown in
Table 9:
Step 2. Find all possible
D-MP candidate solutions from the feasible transport mode
X obtained in Step 1.
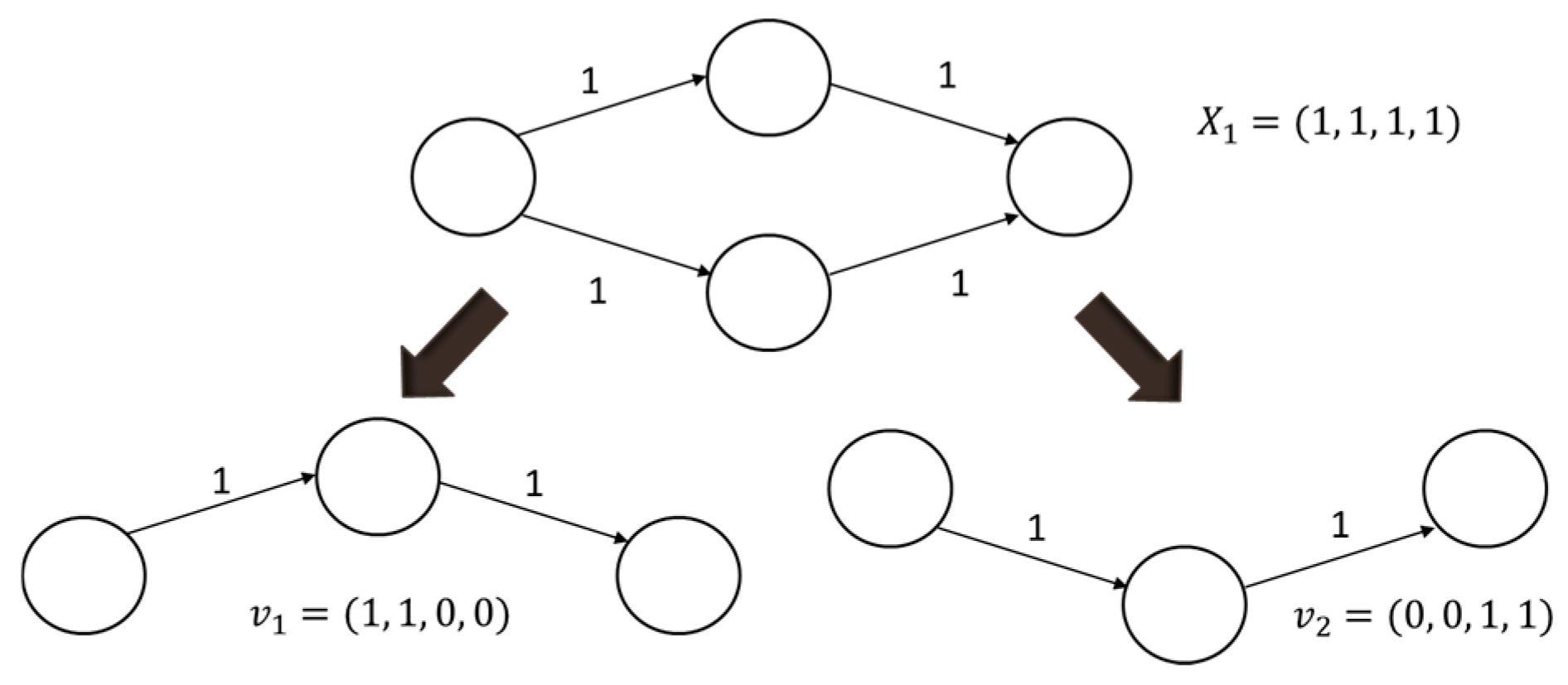
We bring in Equation (6) to find the D-MP candidate solution: X1 = (3, 3, 0, 0), X2 = (0, 0, 3, 3), X3 = (2, 2, 1, 1) and X4 = (1, 1, 2, 2).
Step 3. This step uses the comparison algorithm to check whether the
D-MP candidate solution obtained in Step 2 is a real
D-MP solution. The final test results are shown in
Table 10.
Step 4. In the actual transportation service network, not only must the user successfully reach the sink node but must also arrive under the users’ condition of time, so the time limit must be considered. This step uses the time window as a time limit, where the upper limit of the time window represents the user’s tolerance for a delayed arrival. When the time is exceeded, the solution is an infeasible solution. The lower limit of the time window represents the time at which the estimated service start time. If it arrives early, it must wait until the node’s departure time to continue moving.
Here, we assumed that the time window of the sink node (node 4) was {
,
} = {0, 25} (the sink node was the last stop, so there was no lower limit). In order to facilitate the expression and calculation time, we listed the
D-MP solutions processed by the comparison algorithm in
Table 11.
Check X1 = (3, 3, 0, 0) as an example:
This D-MP solution only has the {e1, e2} route, so only this route needed to be checked. The following is the detailed flow of the calculation:
At the start time of node 1,
C11,1 = 0 and the arrival time of the second station (node 2) is calculated as
A11,2:
After calculating the arrival time, the next step is to calculate the process time after the time window processing C11,2. However, node 2 does not assume a time window, so C11,2 = A11,2 = 10.
The flow time at node 2 is
C11,2 = 10, then the arrival time
A12,3 of the third station (node 4) is calculated:
After calculating the arrival time, the next step is to calculate the process time
C12,4 after the time window processing:
Substituting A12,4 = 26, we found that the process time exceeded the upper limit of the time window of 25, so was unable to complete the service in time, which means that this solution is an infeasible solution under the consideration of the time window conditions.
Finally, the results are shown in
Table 12.
Step 5. In the actual traffic service network, the path state will affect the reliability. In this step, the reliability of each arc is obtained by means of a fuzzy system. First, we established a fuzzy rule base and fuzzy set for each flow, time and reliability.
Table 13 presents the sample fuzzy rule library and
Table 14 shows the time and flow of each path in each set of solutions.
In this study, the reliability of each arc was determined by the fuzzy system constructed.
Table 15 shows the reliability results calculated using the fuzzy system.
Step 6. First, find the reliability of each
D-MP solution, as shown in Equations (24)–(26):
We used fuzzy intersection calculations to satisfy customer demand and time windows and finally obtained the overall network reliability by using the algebraic intersection formula to calculate:
| Rfinal = Pr{X2∪X3∪X4 } |
| = [Pr{X2} + Pr{X3} + Pr{X4}] − [Pr{X2⋂X3} + Pr{X2⋂ X4} + Pr{X3⋂ X4}] + [Pr{ X2⋂ X3⋂ X4}] |
| = [Pr{X2} + Pr{X3} + Pr{X4}] − [t(X2,X3) + t(X2,X4) + t(X3,X4)] + t(X2,X3,X4) |
| = 0.0625 + 0.2498 + 0.1932 − (0.0625 × 0.2498 + 0.0625 × 0.1932 + 0.2498 × 0.1932) + |
| (0.0625 × 0.2498 × 0.1932) |
| = 0.4326 |
Considering the fuzzy state and time window constraints, the network had a 43.26% reliability of meeting the user demand.
4.2. Multi-Time Window and Multi-Service Network
We also present a second reality of a multi-time window and multi-service network. This issue explores the network from a server perspective. In a complex network, there is more than one demand, source node and sink node. The network model is shown in
Figure 11, which has two source nodes, two sink nodes and eight paths (arcs). The first sink node (node 7) has two service requirements (d1, d2) = (1, 2); and the second sink node (node 8) has two service requirements (d1, d2) = (2, 1).
Table 16 shows the upper limit of the transportable capacity of each arc and the corresponding probability value, operation lead time, transit time and commodity ratio. This study developed the fuzzy sets as shown in
Table 17 (the fuzzy function values of flow and time for each arc) and
Table 18 (the fuzzy function values of reliability for each arc), according to the rule based on the description in
Section 2.2. In order to deal with more complex systems, scholars have developed multi-state fuzzy reliability based on the basis of binary-state fuzzy reliability [
42]. Multi-state fuzzy reliability divides the interval [0,1] into several subintervals and defines fuzzy sets for each degree of interval state, most of which are defined by expert experience. In order to make up for the lack of expert ability, later combined with fuzzy logic and inference [
43], constructing a fuzzy system [
44], can adjust parameters according to various states, strengthen their learning ability and have a better interpretation of more complex systems.
Step 1. The amount of transport on each path must not exceed the upper limit of transport (
M1,
M2,
M3,
M4,
M5,
M6,
M7,
M8) = (3, 3, 3, 4, 4, 3, 3, 3) for each path (arc). For the convenience of representation, let
X = (
x1,3,
x2,4,
x3,5,
x3,6,
x4,5,
x4,6,
x5,7,
x6,8) = (
x1,
x2,
x3,
x4,
x5,
x6,
x7,
x8).
This network must meet the customer demand of the first sink node (Node 7) (
d1,
d2) = (1, 2) and the second sink node (Node 8) (
d1,
d2) = (2, 1):
According to the flow conservation theory, the sum of the inflow and outflow of nodes 3–6 must be the same:
This process is shown in
Table 19 to find all feasible solutions
X1 = (
x11,
x21,
x31,
x41,
x51,
x61,
x71,
x81) and
X2 = (
x12,
x22,
x32,
x42,
x52,
x62,
x72,
x82) by the exhaustive method (as shown in
Table 20) through Equations (27)–(42):
Step 2. Find all possible
D-MP candidate solutions from the feasible transport mode
X obtained in step 1.
We found the D-MP candidate solution: (3, 3, 2, 2, 2, 2, 3, 3), (3, 3, 3, 1, 1, 2, 3, 3), (3, 3, 1, 3, 1, 3, 3, 3), (3, 3, 2, 2, 2, 2, 3, 3), (3, 3, 0, 3, 2, 2, 3, 3), (3, 3, 2, 2, 2, 2, 3, 3). Among them, it was found that there were duplicate solutions and after deletion, the solution was solved as X1 = (3, 3, 2, 2, 2, 2, 3, 3), X2 = (3, 3, 3, 1, 1, 2, 3, 3), X3 = (3, 3, 1, 3, 1, 3, 3, 3) and X4 = (3, 3, 0, 3, 2, 2, 3, 3).
Step 3. This step uses the comparison algorithm to check whether the
D-MP candidate solution obtained in Step 2 is a real
D-MP solution. The final test results are shown in
Table 21.
Next, the user’s time limit is processed and a fuzzy system is established to determine the reliability of each path and finally the overall network reliability is obtained.
Step 4. This step establishes multiple time windows on multiple nodes as a constraint on the network model, where the upper limit of the time window represents the user’s tolerance for a delayed arrival. When the time is exceeded, the solution is an infeasible solution. The lower limit of the time window represents the time at which the estimated service start time. If it arrives early, it must wait until the node’s departure time to continue moving. In order to facilitate the expression and calculation time, we list the
D-MP solutions processed by the comparison algorithm, as shown in
Table 22.
Before the calculation, we proposed the
D-MP solution as four routes of {
e1,
e3,
e7}, {
e2,
e5,
e7}, {
e1,
e4,
e8} and {
e2,
e6,
e8}. Here we use
X1 = (3, 3, 2, 2, 2, 2, 3, 3) as an example to directly use
Table 23 to express the detailed process of checking the solution.
The arrival time is as Equation (43):
The process time is as Equation (44):
Table 24 shows the time window test
D-MP solution results in Step 4.
Step 5. In this step, the reliability of each arc is obtained by means of a fuzzy system. First, establish a fuzzy rule base and fuzzy set for each flow, time and reliability.
Table 25 presents the sample fuzzy rule library and
Table 26 shows the time and flow of each path in each set of solutions.
In this study, the reliability of each arc was determined by the fuzzy system constructed. The reliability calculation results of each path in are shown in
Table 27.
Step 6. First, find the reliability of each
D-MP solution, as shown in Equations (45) and (46):
The final result was X2 = 0.000376, X3 = 0.000129
We used fuzzy intersection calculations to satisfy customer demand and time windows and finally obtained the overall network reliability by using the Algebraic intersection formula to calculate:
| Rfinal = Pr{X2∪X3} |
| = [Pr{X2}+Pr{X3} − [Pr{X2⋂ X3} |
| = Pr{X2}+Pr{X3}− t(X2,X3) |
| = 0.000376 + 0.000129 − 0.000376 · 0.000129 |
| = 0.000504 |
Considering the fuzzy state and the time window, this network can hardly meet all of the user demand. Compared with the first example, this example has more paths belonging to the high traffic and high load state. For the definition of time fuzzification, most of them were long-term states and more time window limits were set up. The above two points suggest that users have more and higher requirements on the service. Therefore, the network cannot meet the demand of users and it is necessary to discover the crux of the problem for immediate improvements.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










