Design and Analysis of Three-Stage Amplifier for Driving pF-to-nF Capacitive Load Based on Local Q-Factor Control and Cascode Miller Compensation Techniques


Abstract
:1. Introduction
2. Review of Previous Frequency Compensation Techniques under Large Load Variations
2.1. Nested Miller Compensation (NMC)
2.2. Damping Factor Control Frequency Compensation (DFCFC)
2.3. Cascode Miller Compensation with Local Impedance Attenuation (CLIA)
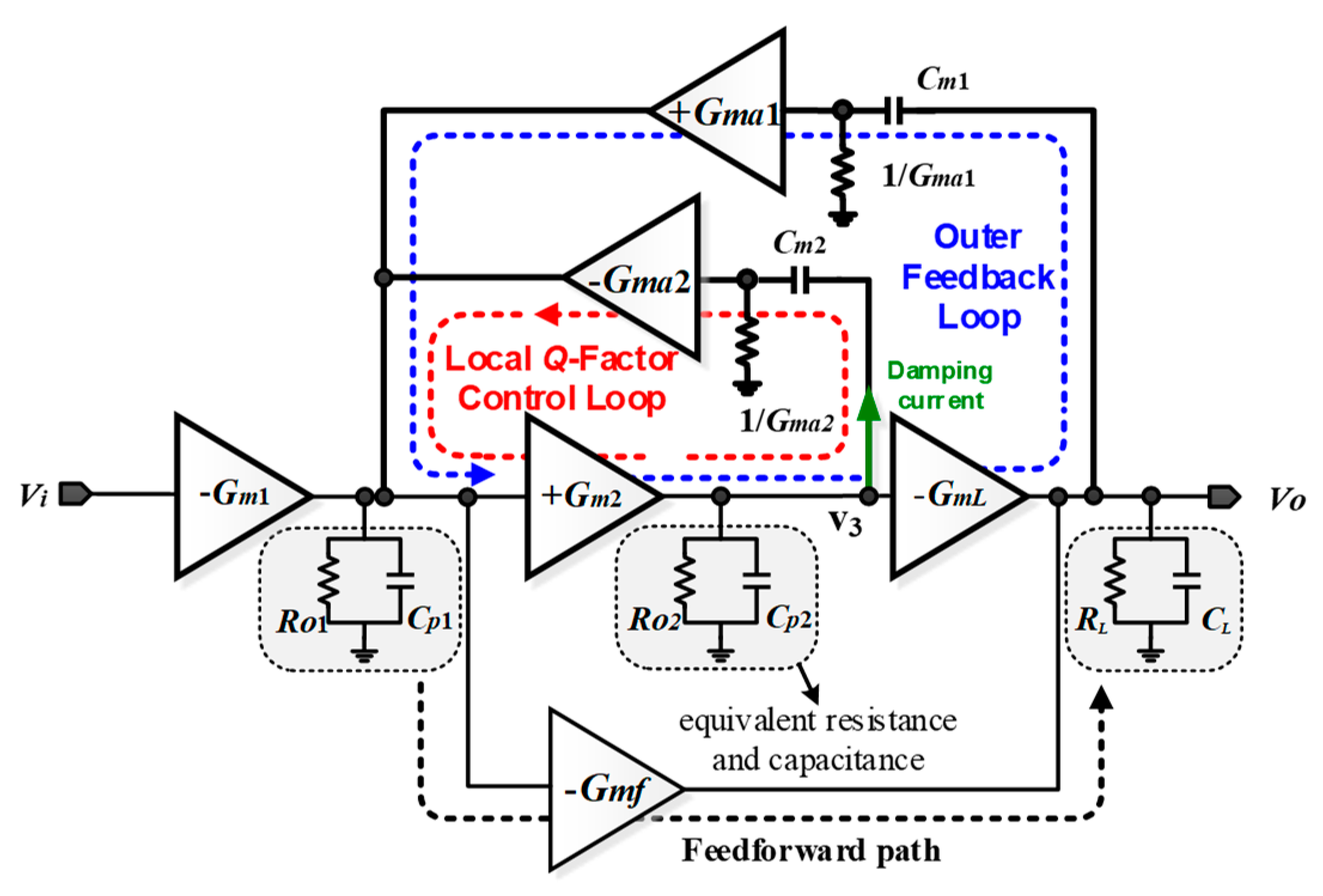
3. Proposed Cascode Miller-Compensation with Local Q-Factor Control (CLQC)
3.1. Structure
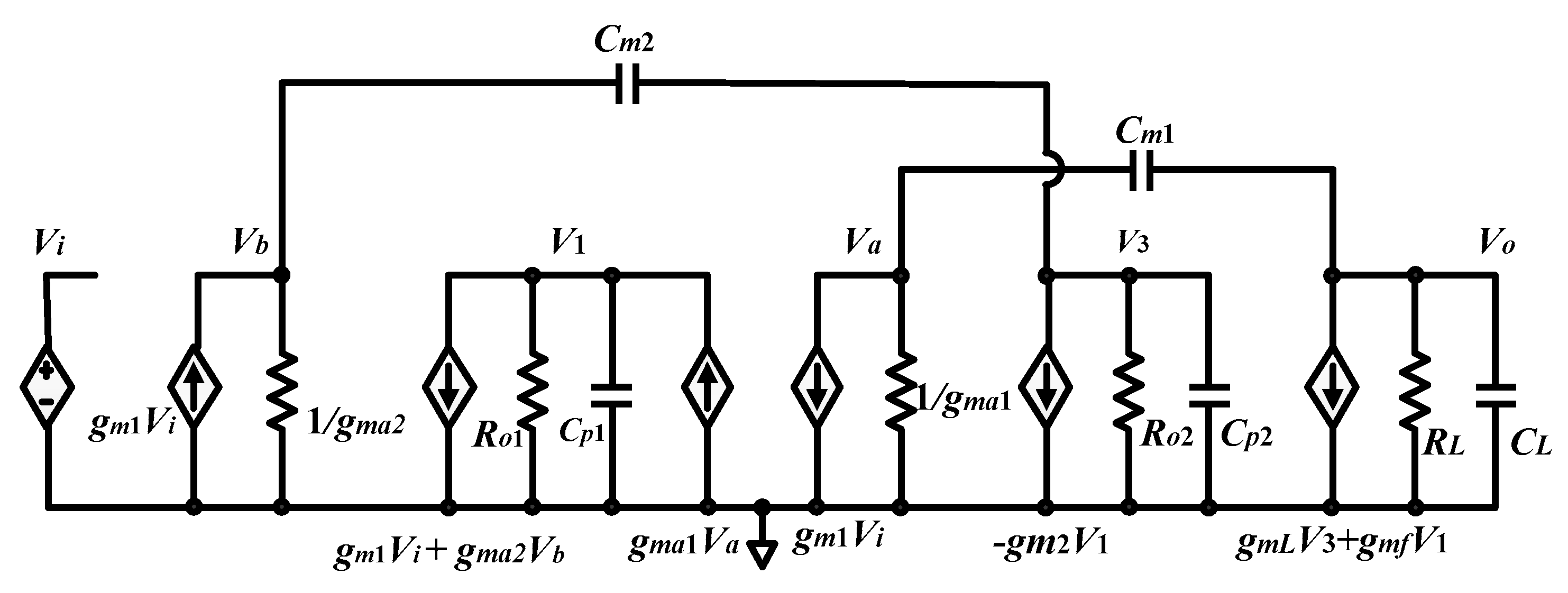
3.2. Small-Signal Analysis of the Proposed Three-Stage CLQC Amplifier
3.3. Stability Analysis Under Large CL Variation
3.4. Benefits of the Local Q-Factor Control (LQC) Loop and Cascode Miller Compensation
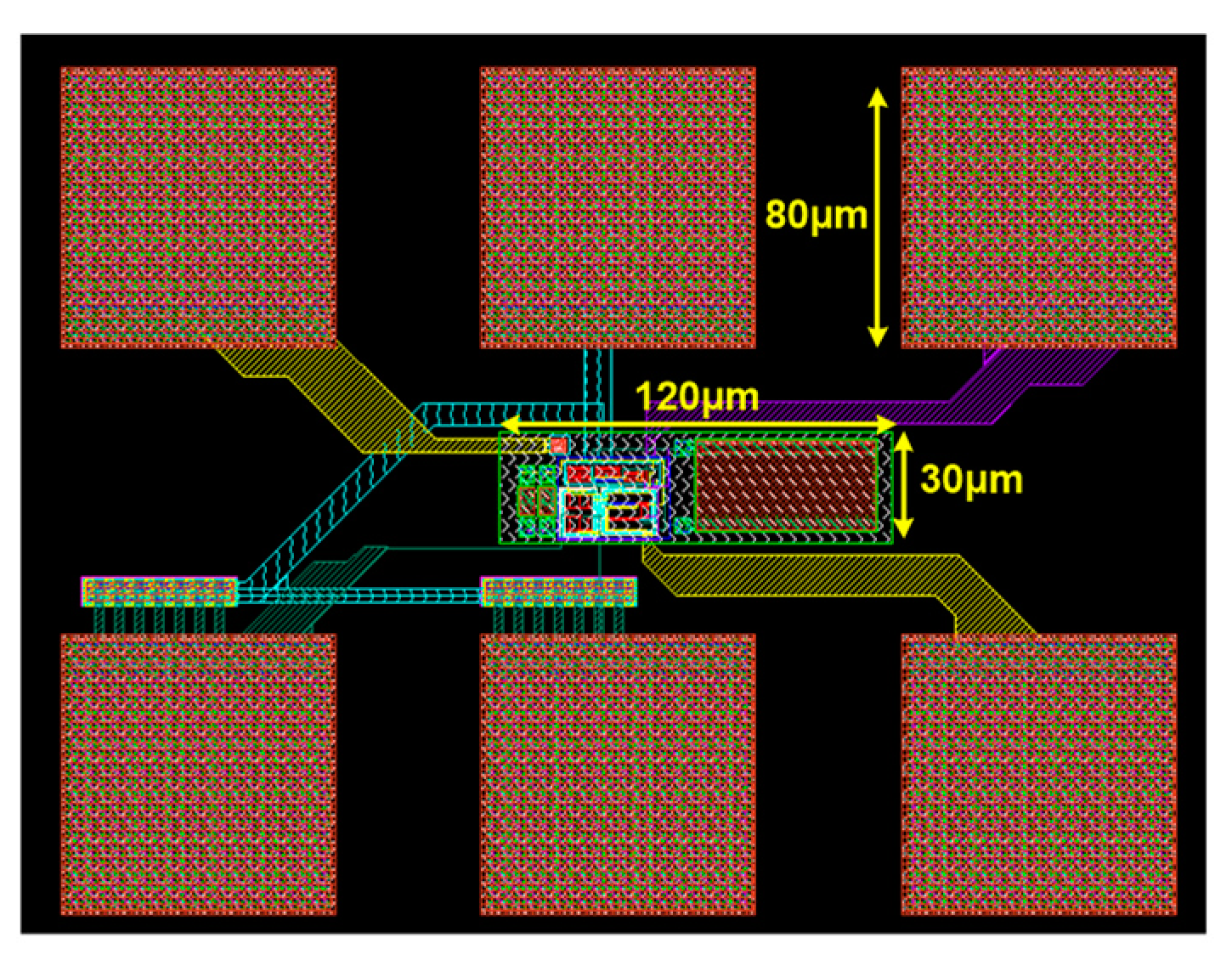
4. Circuit Implementation
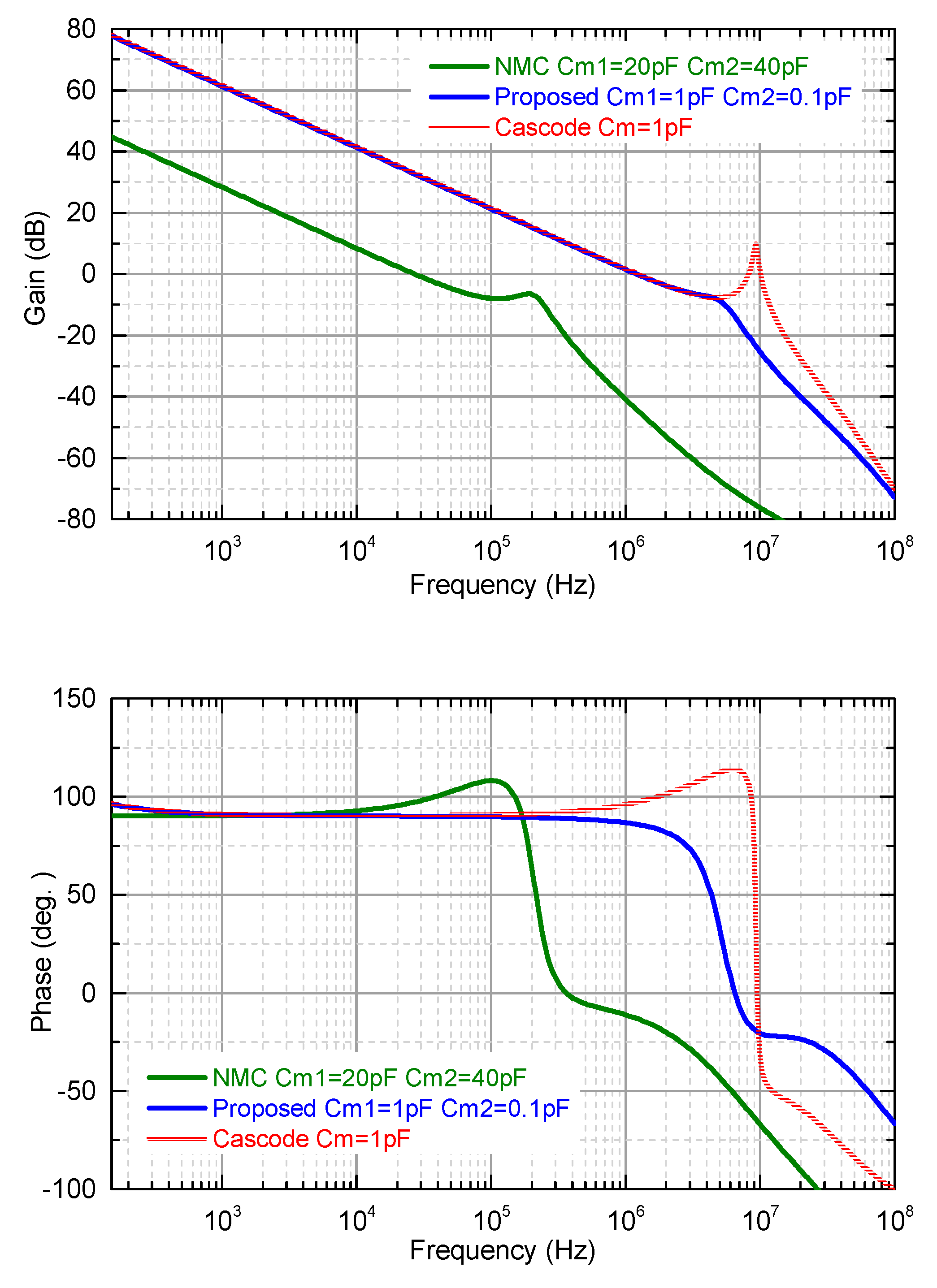
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gulati, K.; Lee, H.S. A high-swing CMOS telescopic operational amplifier. IEEE J. Solid-State Circuits 1998, 33, 2010–2019. [Google Scholar] [CrossRef]
- Sackinger, E.; Guggenbuhl, W. A high-swing, high-impedance MOS cascode circuit. IEEE J. Solid-State Circuits 1990, 25, 289–298. [Google Scholar] [CrossRef]
- Li, Y.L.; Han, K.F.; Tan, X.; Yan, N.; Min, H. Transconductance enhancement method for operational transconductance amplifiers. Electron. Lett. 2010, 46, 1321–1323. [Google Scholar] [CrossRef]
- Ho, M.; Leung, K.N.; Mak, K.L. A low-power fast-transient 90-nm low-dropout regulator with multiple small-gain stages. IEEE J. Solid-State Circuits 2010, 45, 2466–2475. [Google Scholar] [CrossRef]
- Cheng, Q.; Zhang, H.; Xue, L.; Guo, J. A 1.2-V 43.2-µW three-stage amplifier with cascode Miller-compensation and Q-reduction for driving large capacitive load. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; pp. 458–461. [Google Scholar]
- Nguyen, R.; Murmann, B. The design of fast-settling three-stage amplifiers using the open-loop damping factor as a design parameter. IEEE Trans. Circuits Syst. I Reg. Papers 2010, 57, 1244–1254. [Google Scholar] [CrossRef]
- Eschauzier, R.G.H.; Kerklaan, L.P.T.; Huijsing, J.H. A 100-MHz 100-dB operational amplifier with multipath nested Miller compensation structure. IEEE J. Solid-State Circuits 1992, 27, 1709–1717. [Google Scholar] [CrossRef] [Green Version]
- Leung, K.N.; Mok, P.K.T. Analysis of multistage amplifier - frequency compensation. IEEE Trans. Circuits Syst. I Reg. Papers 2001, 48, 1041–1056. [Google Scholar] [CrossRef]
- You, F.; Embabi, S.H.K.; Sanchez-Sinencio, E. Multistage amplifier topologies with nested Gm-C compensation. IEEE J. Solid-State Circuits 1997, 32, 2000–2010. [Google Scholar] [CrossRef]
- Leung, K.N.; Mok, P.K.T.; Ki, W.H.; Sin, J.K.O. Three-stage large capacitive load amplifier with damping-factor-control frequency compensation. IEEE J. Solid-State Circuits 2000, 35, 221–230. [Google Scholar] [CrossRef]
- Lee, H.; Mok, P.K.T. Active-feedback frequency-compensation technique for low-power multistage amplifiers. IEEE J. Solid-State Circuits 2003, 38, 511–520. [Google Scholar] [CrossRef]
- Peng, X.; Sansen, W. AC boosting compensation scheme for low power multistage amplifiers. IEEE J. Solid-State Circuits 2004, 39, 2074–2079. [Google Scholar] [CrossRef]
- Fan, X.; Mishra, C.; Sanchez-Sinencio, E. Single Miller capacitor frequency compensation technique for low-power multistage amplifiers. IEEE J. Solid-State Circuits 2005, 40, 584–592. [Google Scholar]
- Peng, X.; Sansen, W.; Hou, L.; Wang, J.; Wu, W. Impedance adapting compensation for low-power multistage amplifiers. IEEE J. Solid-State Circuits 2011, 46, 445–451. [Google Scholar] [CrossRef]
- Guo, S.; Lee, H. Dual active-capacitive-feedback compensation for low-power large-capacitive-load three-stage amplifiers. IEEE J. Solid-State Circuits 2011, 46, 452–464. [Google Scholar] [CrossRef]
- Chong, S.S.; Chan, P.K. Cross feedforward cascode compensation for low-power three-stage amplifier with large capacitive load. IEEE J. Solid-State Circuits 2012, 47, 2227–2234. [Google Scholar] [CrossRef]
- Yan, Z.; Mak, P.I.; Law, M.-K.; Martins, R.P. A 0.016 mm2 144 μW three-stage amplifier capable of driving 1-to-15 nF capacitive load with 0.95 MHz GBW. IEEE J. Solid-State Circuits 2013, 48, 527–540. [Google Scholar] [CrossRef]
- Qu, W.; I’m, J.-P.; Kim, H.-S.; Cho, G.-H. A 0.9V 6.3μW multistage amplifier driving 500 pF capacitive load with 1.34MHz GBW. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 290–292. [Google Scholar]
- Yan, Z.; Mak, P.I.; Law, M.-K.; Martins, R.P. A 0.0013 mm2 3.6 µW nested-current-mirror single-stage amplifier driving 0.15-to-15 nF capacitive loads with >62° phase margin. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 288–289. [Google Scholar]
- Qu, W.; Singh, S.; Lee, Y.; Son, Y.; Cho, G. Design-oriented analysis for Miller compensation and its application to multistage amplifier design. IEEE J. Solid-State Circuits 2017, 52, 517–527. [Google Scholar] [CrossRef]
- Lau, M.W.; Mak, K.H.; Leung, K.N.; Guo, J.; Goh, W.L. Enhanced active-feedback frequency compensation with on-chip capacitor reduction feature for amplifiers with large capacitive load. Int. J. Circ. Theor. Appl. 2017, 45, 2119–2133. [Google Scholar] [CrossRef]
- Lau, S.K.; Mok, P.K.T.; Leung, K.N. A low-dropout regulator for SoC with Q-reduction. IEEE J. Solid-State Circuits 2007, 42, 658–664. [Google Scholar] [CrossRef]
- Dhanasekaran, V.; Silva-Martinez, J.; Sanchez-Sinencio, E. Design of three-stage class-AB 16 Ω headphone driver capable of handling wide range of load capacitance. IEEE J. Solid-State Circuits 2009, 44, 1734–1744. [Google Scholar] [CrossRef]
- Huang, W.-J.; Nagayasu, S.; Liu, S.-I. A rail-to-rail class-B buffer with DC level-shifting current mirror and distributed Miller compensation for LCD column drivers. IEEE Trans. Circuits Syst. I, Reg. Papers 2011, 58, 1761–1772. [Google Scholar] [CrossRef]
- Li, B.; Wang, W.; Liu, J.; Liu, W.J.; Yang, Q.; Ye, W.B. A 1 pF-to-10 nF generic capacitance-to-digital converter using zero-crossing delta sigma modulation. IEEE Trans. Circuits Syst. I Reg. Pap. 2018, 65, 2169–2182. [Google Scholar] [CrossRef]
- Reay, R.J.; Kovacs, G.T.A. An unconditionally stable two-stage CMOS amplifier. IEEE J. Solid-State Circuits 1995, 30, 591–594. [Google Scholar] [CrossRef]
- Grasso, A.D.; Marano, D.; Palumbo, G.; Penni, S. High-performance three-stage single-Miller CMOS OTA with no upper limit of CL. IEEE Trans. Circuits Syst. II Exp. Briefs 2018, 65, 1529–1533. [Google Scholar] [CrossRef]
- Yan, Z.; Mak, P.I.; Law, M.-K.; Martins, R.P. A 0.0045-mm2 32.4-μW two-stage amplifier for pF-to-nF load using CM frequency compensation. IEEE Trans. Circuits Syst. II Exp. Briefs 2015, 62, 246–250. [Google Scholar] [CrossRef]
- Yan, Z.; Mak, P.I.; Law, M.-K.; Martins, R.P. 0.0045 mm2 15.8 µW three-stage amplifier driving 10×-wide (0.15–1.5 nF) capacitive loads with >50° phase margin. Electron. Lett. 2015, 51, 454–456. [Google Scholar] [CrossRef]
- Hong, S.W.; Cho, G.H. A pseudo single-stage amplifier with an adaptively varied medium impedance node for ultra-high slew rate and wide-range capacitive-load drivability. IEEE Trans. Circ. Syst. I Reg. Pap. 2016, 63, 1567–1578. [Google Scholar] [CrossRef]
- Cheng, Q.; Li, W.; Tang, X.; Guo, J. A cascode Miller compensated three-stage amplifier with local Q-factor control for wide capacitive load applications. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 954–957. [Google Scholar]
- Tan, M.; Ki, W.H. A cascode Miller-compensated three-Stage amplifier with local impedance attenuation for optimized complex-pole control. IEEE J. Solid-State Circuits 2015, 50, 1–10. [Google Scholar] [CrossRef]
- Ahuja, B.K. An improved frequency compensation technique for CMOS operational amplifiers. IEEE J. Solid-State Circuits 1983, 18, 629–633. [Google Scholar] [CrossRef]
- Tan, X.L.; Chong, S.S.; Chan, P.K.; Dasgupta, U. A LDO regulator with weighted current feedback technique for 0.47 nF–10 nF capacitive load. IEEE J. Solid-State Circuits 2014, 49, 2658–2672. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Expansion |
|---|---|
| A0 | 1 |
| A1 | |
| A2 | |
| A3 | |
| A4 | |
| B1= (A3A2 − A4A1)/A3 | A1 |
| B2= A0 | 1 |
| C1 = (B1A1 − A3A0)/B1 | A1 |
| D1 = A0 | 1 |
| gm1 | gm2 | gmL | gma1 | gma2 | gmf | Cm1 | Cm2 |
|---|---|---|---|---|---|---|---|
| 7.5 μS | 32 μS | 580 μS | 18 μS | 14 μS | 560 μS | 1 pF | 0.05 pF |
| Transistor | M1 | M2,3 | M4,5 | M6,7 | M8,9 | M10 | M11 | M12 | M13 | M14 | M15 | M16 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| W/L (μm) | 1/2 | 4/2 | 0.4/3 | 1/0.8 | 2/1 | 0.4/3 | 0.6/0.13 | 0.6/0.13 | 2/0.64 | 3/1 | 2/0.64 | 0.64/0.32 |
| Multiple | 2 | 2 | 3 | 1 | 1 | 2 | 1 | 3 | 1 | 1 | 10 | 5 |
| Corner * | TT | FF | SS | SF | FS |
|---|---|---|---|---|---|
| T = −40 °C | |||||
| UGF (MHz) | 0.80 | 0.75 | 0.92 | 0.95 | 0.90 |
| PM (°) | 46.0 | 41.4 | 43.2 | 46.0 | 49.8 |
| GM (dB) | 14.0 | 14.9 | 13.8 | 13.9 | 13.7 |
| T = 27 °C | |||||
| UGF (MHz) | 0.88 | 0.77 | 0.80 | 0.93 | 0.89 |
| PM (°) | 45.3 | 40.2 | 46.4 | 45.5 | 45.6 |
| GM (dB) | 13.5 | 15.8 | 14.2 | 13.5 | 13.2 |
| T = 125 °C | |||||
| UGF (MHz) | 0.78 | 0.72 | 0.70 | 0.72 | 0.75 |
| PM (°) | 44.2 | 42.3 | 40.2 | 43.0 | 45.4 |
| GM (dB) | 14.1 | 15.1 | 14.5 | 14.6 | 13.8 |
| Specifications | EL’15 [29] | TCAS-I’16 [30] | This Work | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Drivability | 10x | 150x | 375x | |||||||
| Load CL | 150 pF | 1 nF | 1.5 nF | 100 pF | 1.5 nF | 15 nF | 4 pF | 150 pF | 500 pF | 1.5 nF |
| Technology | 0.18-µm CMOS | 0.18-µm CMOS | 0.13-µm CMOS | |||||||
| Chip Area* (mm2) | 0.0045 | 0.0021 | 0.0036 | |||||||
| DC Gain | >100 dB | 100 dB | >100 dB | |||||||
| UGF (MHz) | 1.60 | 1.13 | 0.89 | 1.66 | 0.12 | 0.01 | 0.97 | 0.92 | 0.90 | 0.88 |
| PM (°) | 76.7 | 56.2 | 50.0 | 69 | 87 | 85 | 95.0 | 89.6 | 62.5 | 42.3 |
| Power | 15.8 µW @ 1.2 V | 7.4 µW @ 1.1 V | 24.0 µW @ 1.0 V | |||||||
| On-chip Cap. | 1.0 pF | 0 | 1.05 pF | |||||||
| On-chip Res. | 125 kΩ | 17.7 kΩ | 0 | |||||||
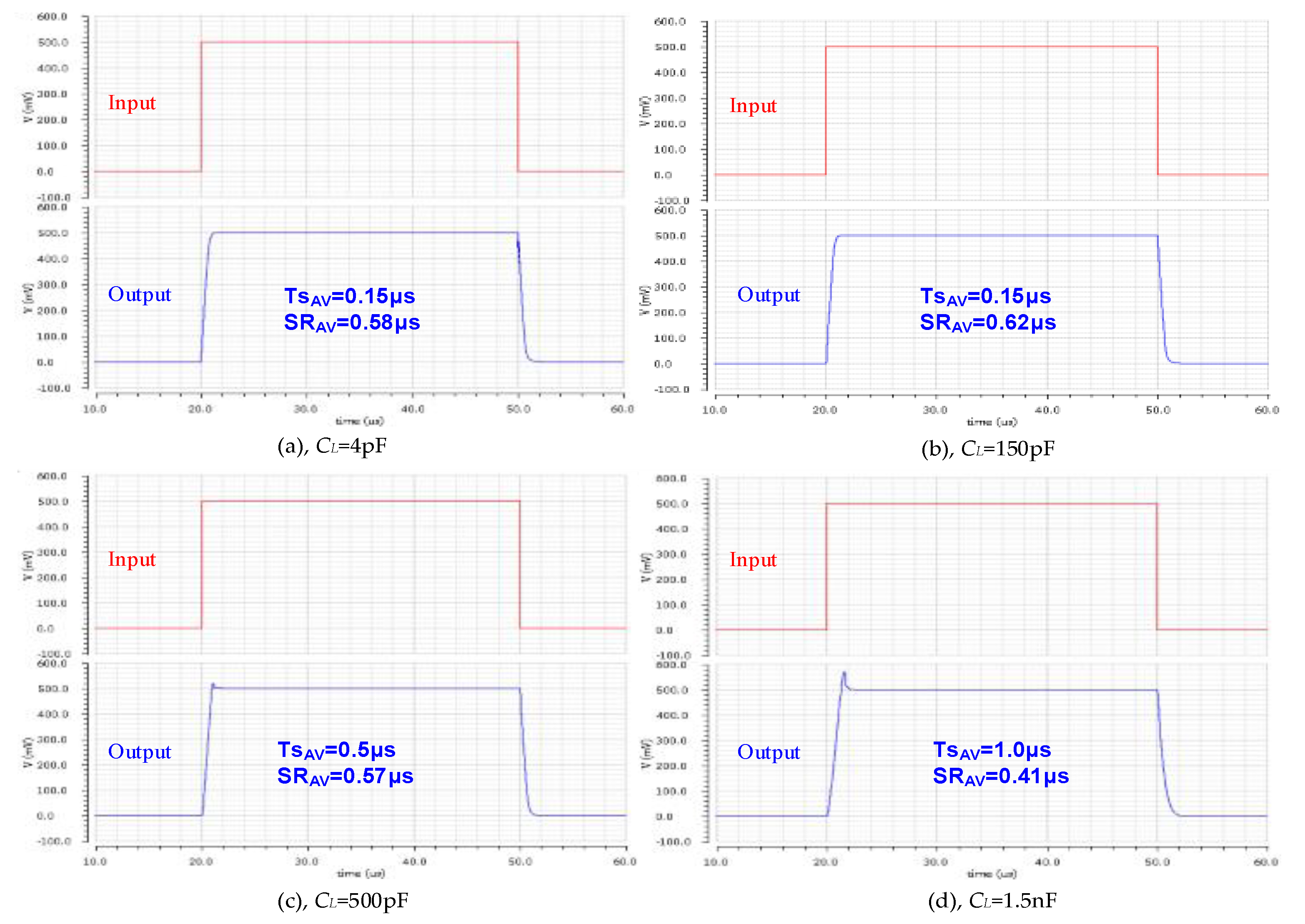
| Average SR (V/µs) | 0.76 | 0.41 | 0.28 | 8.67 | 5.87 | 1.1 | 0.58 | 0.62 | 0.57 | 0.41 |
| Average 1% Ts (µs) | 2.16 | 3.87 | 5.34 | 1.2 | 4.3 | 2.4 | 0.15 | 0.15 | 0.5 | 1.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Q.; Li, W.; Tang, X.; Guo, J. Design and Analysis of Three-Stage Amplifier for Driving pF-to-nF Capacitive Load Based on Local Q-Factor Control and Cascode Miller Compensation Techniques. Electronics 2019, 8, 572. https://doi.org/10.3390/electronics8050572
Cheng Q, Li W, Tang X, Guo J. Design and Analysis of Three-Stage Amplifier for Driving pF-to-nF Capacitive Load Based on Local Q-Factor Control and Cascode Miller Compensation Techniques. Electronics. 2019; 8(5):572. https://doi.org/10.3390/electronics8050572
Chicago/Turabian StyleCheng, Qi, Weimin Li, Xian Tang, and Jianping Guo. 2019. "Design and Analysis of Three-Stage Amplifier for Driving pF-to-nF Capacitive Load Based on Local Q-Factor Control and Cascode Miller Compensation Techniques" Electronics 8, no. 5: 572. https://doi.org/10.3390/electronics8050572
APA StyleCheng, Q., Li, W., Tang, X., & Guo, J. (2019). Design and Analysis of Three-Stage Amplifier for Driving pF-to-nF Capacitive Load Based on Local Q-Factor Control and Cascode Miller Compensation Techniques. Electronics, 8(5), 572. https://doi.org/10.3390/electronics8050572