Since the output power of the photovoltaic module array is influenced by external factors such as the current amount of sunlight, ambient temperature, and stains, the output power presents a non-linear change. Therefore, a maximum power tracker must be used to control the output power and maintain it at the maximum power point (MPP). At present, the more commonly used maximum power tracking methods include voltage feedback [
1], constant voltage [
2], power feedback [
3], perturb and observe (P&O) [
4], incremental conductance (INC) [
5], etc. Among them, voltage feedback is suitable for relatively stable regions. Firstly, the voltage size of the MPP of the photovoltaic module array under specific sunlight intensity and temperature is measured. Then, by adjusting the terminal voltage of the photovoltaic module array to the same voltage as the previously measured MPP, maximum power tracking can be achieved [
1]. One advantage of this method is that it facilitates simple judgment; however, a disadvantage is that, when the atmospheric conditions substantially change, the new MPP cannot be instantly tracked. On the other hand, the constant voltage tracking method [
2] uses the MPP of the characteristic curve of respective output powers and voltages, which generally corresponds to a constant voltage and then achieves maximum power tracking. It also has the advantage of simple control without complicated calculations, but its disadvantage is that, when the atmospheric environment substantially changes, the new MPP cannot be tracked. Power feedback [
3] on the other hand uses the output power and voltage change ratio
dP/dV of the photovoltaic module array for logical judgement. This method can reduce energy loss and enhance overall efficiency. The disadvantage is that the sensing component in the actual circuit cannot achieve a precise measurement, and the likelihood of the system operating at the power and voltage curve gradient of zero is extremely low. As for P&O [
4], fixed cycles are used to increase or decrease the terminal voltage of the photovoltaic module array. If the voltage perturbance increases the output power of the photovoltaic module array, perturbance in the same direction is performed the next time; if not, perturbance in the opposite direction is performed. The advantage is that the architecture is simple, and only a few measurement parameters are needed, but the disadvantage is that the MPP cannot be precisely tracked, resulting in oscillation occurrence near the maximum power output point and increased tracking loss. The incremental conductance method [
5] uses the power–voltage gradient when the photovoltaic module array is at the MPP as the judgement basis. It has the advantages of precise control and fast responses, but it also has drawbacks, such as a large amount of calculation and high controller costs. The existing maximum power tracking methods above are not applicable for photovoltaic module arrays with partial module shading or malfunctioning work conditions. In a photovoltaic module array with partial shading or malfunction, the non-linear output characteristic curve features multiple peaks [
6]. Hence, if the traditional maximum power tracking methods are adopted, it is unlikely to skip a local solution to find the actual global optimum solution.
In recent years, many scholars engaged in studies targeting the maximum power tracking method when the multi-peak phenomenon occurs due to the shading of partial models in the module array. The most common smart metaheuristic algorithms at present include fuzzy control (FC) [
7], genetic algorithm (GA) [
8], neural network (NN) [
9], and artificial bee colony (ABC) algorithms [
10]. However, as far as FC and NN are concerned, the control process is complex with a large amount of calculation; thus, the actualization difficulty. As for GA and ABC, their applications are limited to the maximum power tracking of a photovoltaic module array with a single-peak value output characteristic curve or without module shading [
11]. Compared to traditional maximum power tracking methods, it has a higher success rate in searching global MPPs.
Although the geometric algorithm of the Lipschitz optimization method [
12] can accurately track to the global optimal value, it needs complex calculations and it needs to set a lot of parameters. The global optimization technique based on an iterative adaptive efficient partition algorithm (EPA) [
13] was proposed to demonstrate that it can obtain the optimal solution in a significantly fewer number of function trials than a conventional GA. However, its calculation is just as complex, and it also needs more parameters; it even needs a preliminary understanding of and experience with the system. In the past, when we solved the optimization problem, deterministic techniques based on the mathematical programming method were often used; however, with the increase of the demand in the real world, it was no longer possible to only use the mathematical programming method to find the optimal solution. Instead, the metaheuristic techniques are used to shorten the calculation time for solving the optimization problem. Although the deterministic optimization algorithm proposed in References [
14,
15] has a smaller number of iterations than the traditional PSO and ABC methods, it is more complex in design and not easy to implement. Furthermore, for the traditional PSO and ABC optimization methods, their parameters are fixed; thus, the number of iterations will be greater.
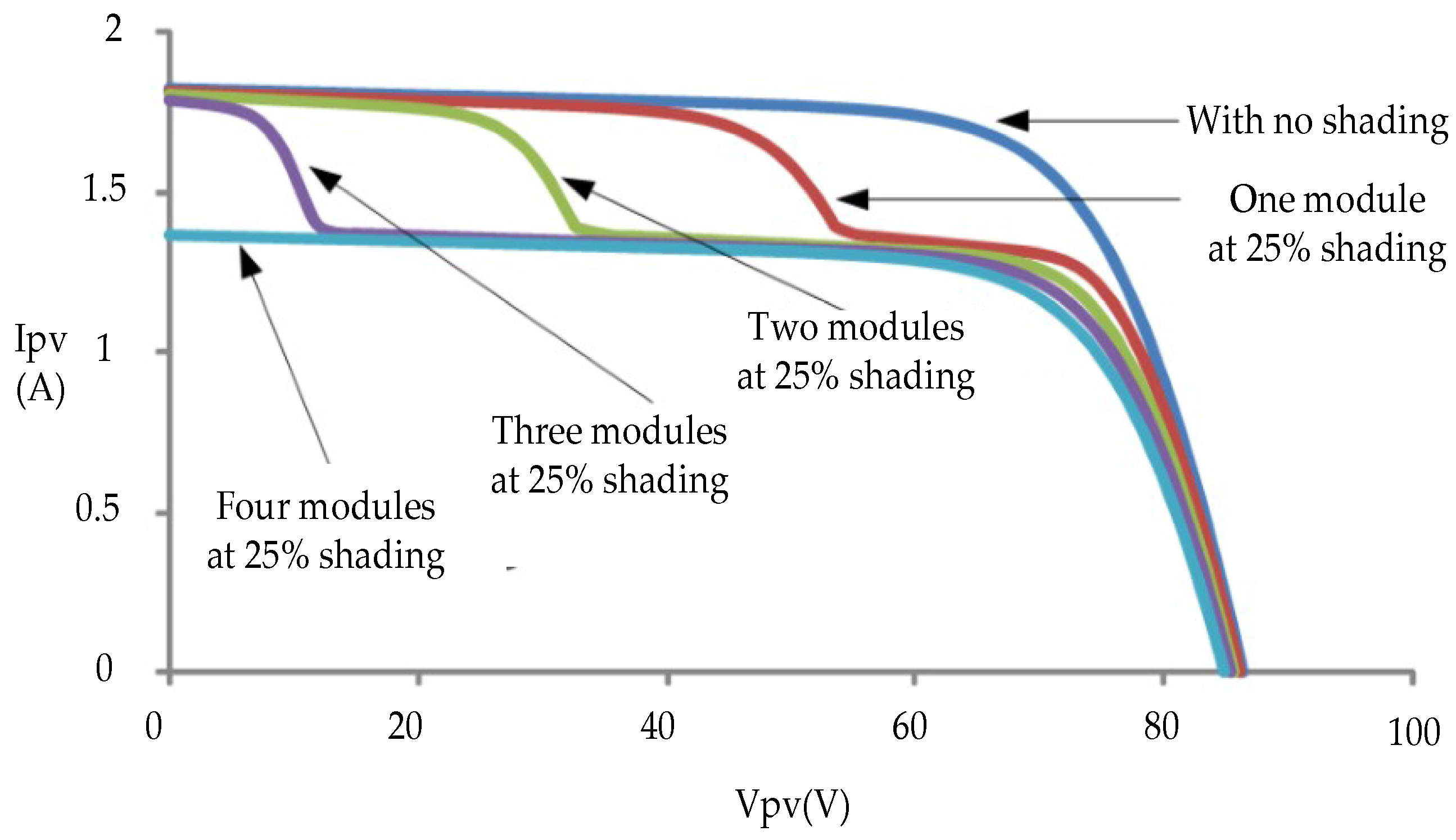
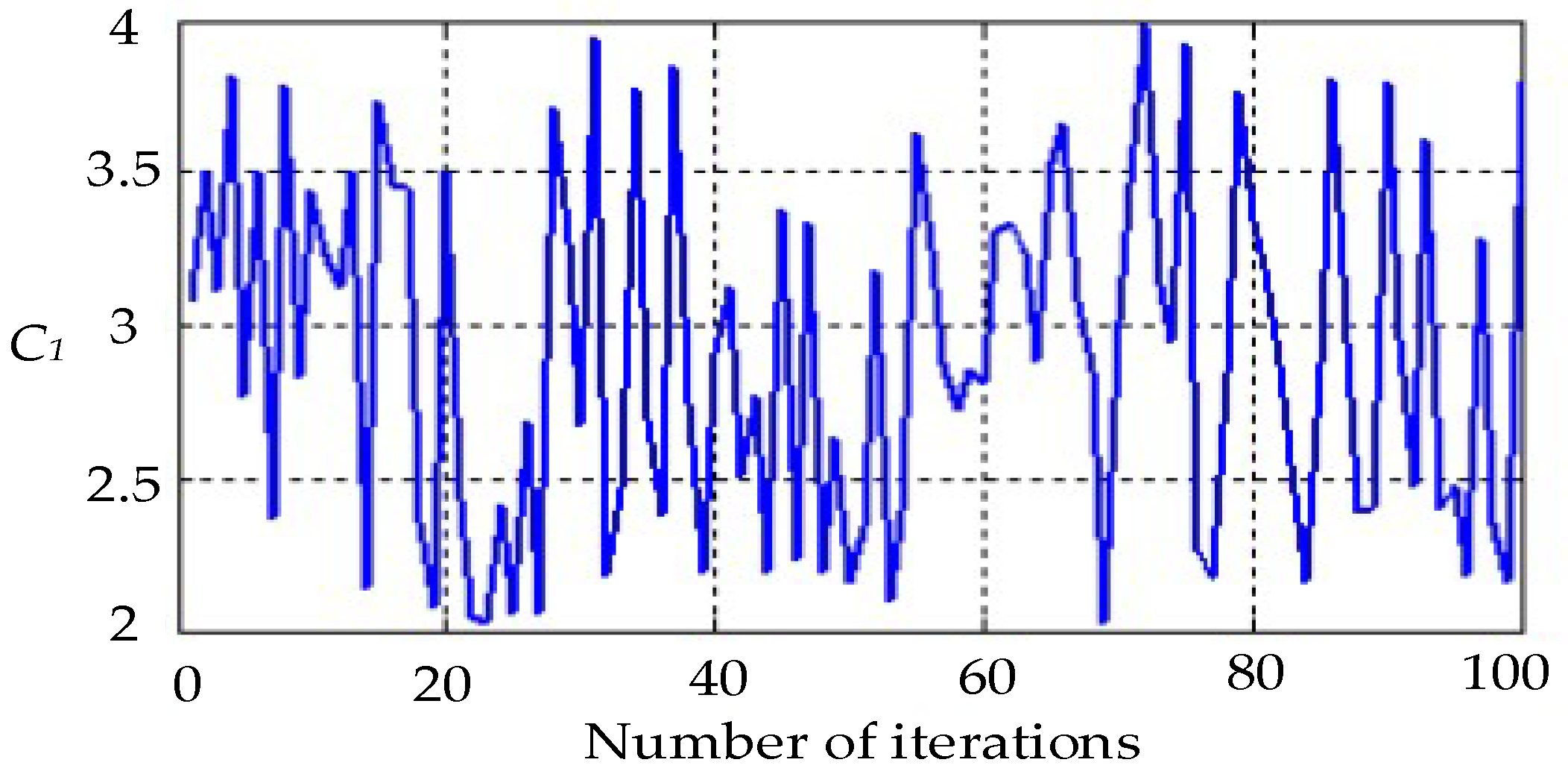
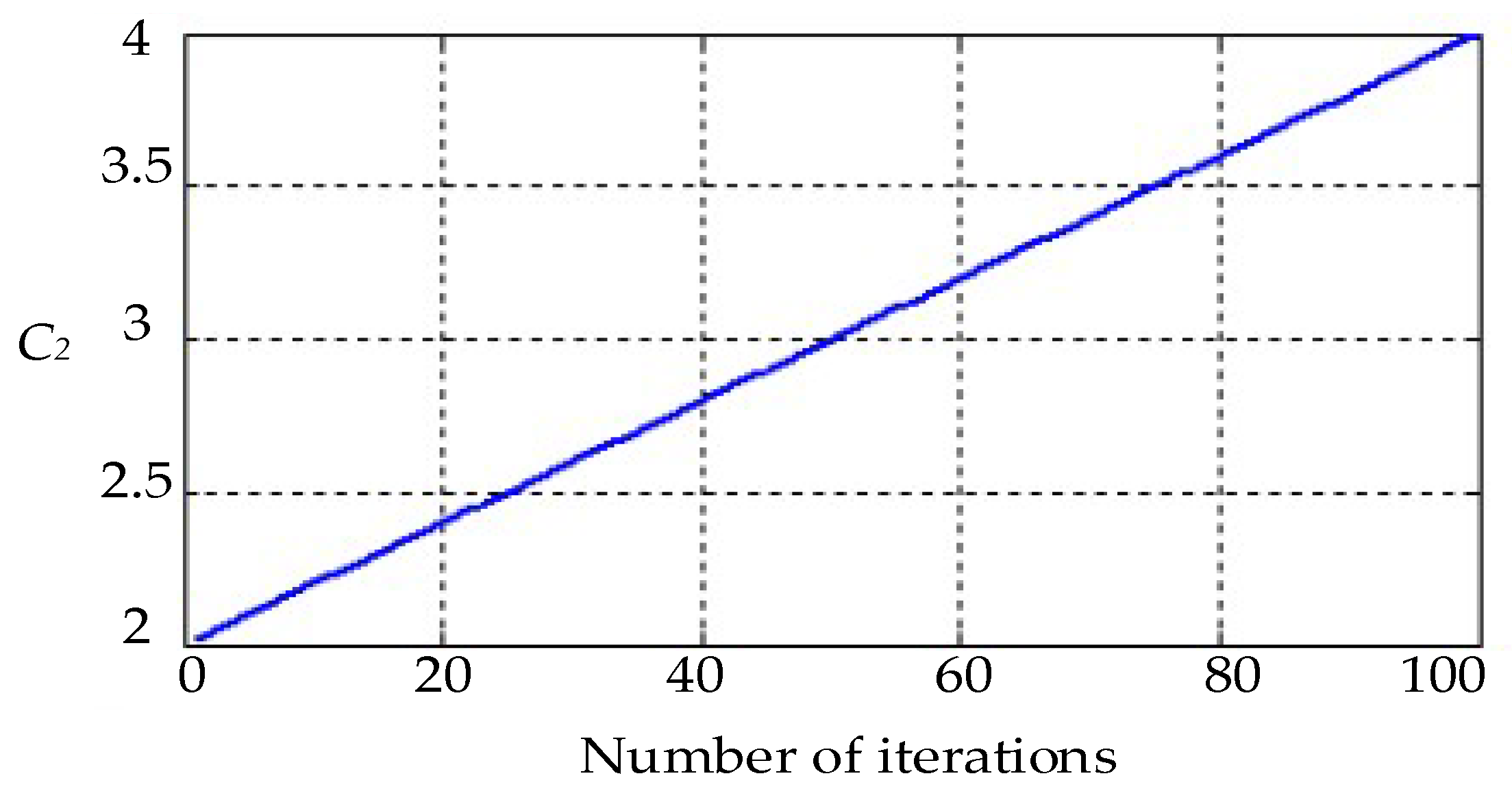
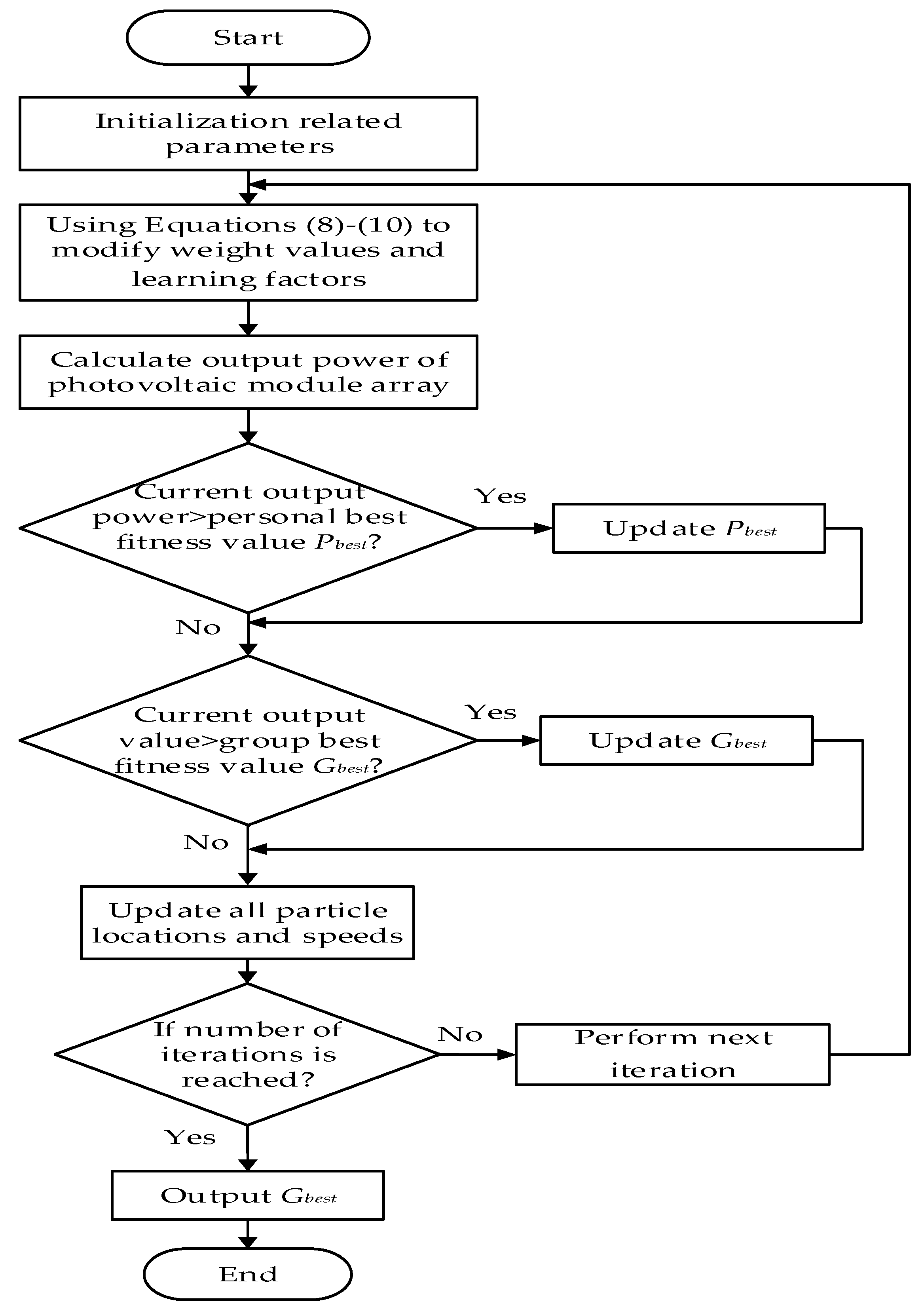
In view of the above maximum power tracking methods, maximum power tracking can only be applied in photovoltaic module arrays with a single-peak value output characteristic curve. This paper implements the ABC, with improvements made to successfully skip the local MPP when the module is subject to different shading ratios, producing a P–V characteristic curve with two-peak, three-peak, and four-peak values, thereby quickly and stably tracking the global MPP. This paper uses the ABC optimization method to adjust the parameters of the traditional PSO. In this way, the number of iterations can be reduced and then the time of the maximum power point tracking can be shortened. Moreover, the combined method of PSO and ABC can reduce the standard deviations of the needed number of iterations and even exceed the deterministic techniques.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}