Semi-Autonomous Coordinate Configuration Technology of Base Stations in Indoor Positioning System Based on UWB


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminary
2.1. Positioning Algorithm
2.2. Ranging Algorithm
3. Semi-Autonomous Configuration Scheme of Base Stations
3.1. Semi-Autonomous Coordinate Configuration Strategy
3.2. Semi-Autonomous Configuration Process and Algorithm
3.3. Un-Calibrated Base Station Coordinate Estimation Algorithm of Virtual Triangle
- (1)
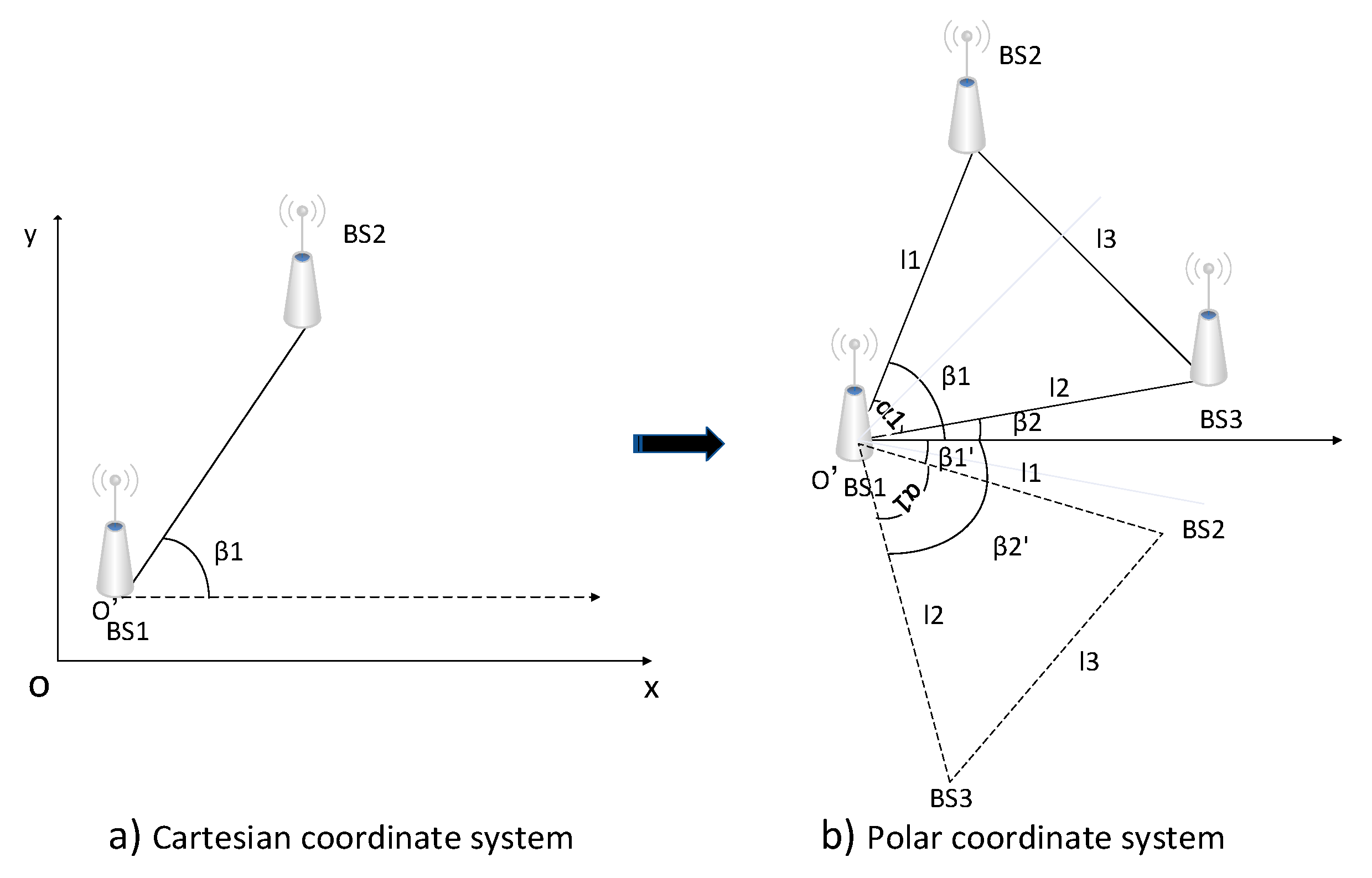
- Suppose that the ranges between BS1 and BS2, BS1 and BS3, BS2 and BS3 are set to be , , and , respectively. They can be measured and regarded as known quantity. In accordance with the cosine theorem, angle starting from the edge of BS1 and BS3 to the edge of BS1 and BS2 is calculated by Equation (7). For the convenience of calculation, some intermediate calculation process needs to be transformed to the Cartesian coordinate system, because the angle starting from the x-axis or horizontal ray to the edge of BS1 and BS2 are the same degree in the two coordinate systems, as shown in Figure 6. In the Cartesian coordinate system, angle is easily calculated by Equation (8).
- (2)
- As shown in Figure 6b, or is the angle starting from the edge of BS1 and BS3 to the horizontal ray from BS1, in the polar coordinate system. In the application field, there are two deployment scenarios, as shown in Figure 7. One is that there is only a straight-line arrangement, the other is that there is a turning at the tail. In transfer procedure of the virtual triangle, the solid line triangle is illuminated for the coordinate estimation transfer process for the first case, and the dotted line triangle is illuminated for another. For simplicity, in the text, the first case is studied and discussed. Another case is the same, just one more judgement step is added. Therefore, in our algorithm, only the azimuth is calculated by
- (3)
- Transform the polar coordinate system to the Cartesian coordinate system and calculate the coordinates of base station BS3 by Equations (10) and (11), as depicted in Figure 8.
- (4)
- Through the above steps, we can get all vertex coordinates of the virtual triangle. As shown in Figure 9, they are the base stations BS1, BS2, and BS3. Since the coordinate of BS3 has been calculated, it can be viewed as a new pre-calibrated base station and would form a new virtual triangle with the original base station BS2 and the next unknown base station BS4. Then, the virtual triangle procedure transfers to the next. The coordinate of BS4 needs to be calculated. That is to say, such procedure would repeat until all the base stations’ coordinates are obtained in one segment.
- (5)
- In addition, a backward operation methodology is adopted and applied to our algorithm. As shown in Figure 10, the pre-calibrated base stations in the next segment can serve as the start of the backward procedure for the previous segment. The procedure is just the same as the aforementioned steps 1 to 4 in the forward. After that, for all the base stations, we can get two sets of values, forward and backward. In our algorithm, the base station coordinate can be determined by the average to improve accuracy.
- (6)
- Thus far, one segment can be completed. Such procedure should be iterated until all segments are completed. Please note that the last segment is different from the other previous segments, because there are four base stations needed to be pre-calibrated, the foremost two and the last two base stations. The procedure also can be described as Algorithm A1 in Appendix A.
4. Method for Analyzing Semi-Autonomous Configuration Technology Influence on Positioning Accuracy
5. Simulation and Performance Discussion of Semi-Autonomous Configuration Algorithm of Base Stations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
| Algorithm A1: Semi-autonomous calculation process of coordinates of unknown base stations. |
| Input: Number of base stations N |
| Output: Base station coordinates . |
| Step 1. Dividing the scene into M segments. |
| For i = 1 to M do |
| Semi-autonomous configuration of forward base stations in the ith segment. |
| For j = m + 2 to m + 13 do |
|
| End for |
| Step 2. The backward is implemented and the method is the same as the forward. |
| Step 3. The average operation is performed on the data set of forward and backward. |
| End for |
References
- Kian Meng, T.; Choi Look, L. GPS and UWB Integration for indoor positioning. In Proceedings of the 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- Kolakowski, J.; Consoli, A.; Djaja-Josko, V.; Ayadi, J.; Morrigia, L.; Piazza, F. UWB localization in EIGER indoor/outdoor positioning system. In Proceedings of the IEEE 8th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Warsaw, Poland, 24–26 September 2015; pp. 845–849. [Google Scholar]
- Goswami, S. Indoor Location Technologies; Springer: New York, NY, USA, 2013. [Google Scholar]
- Singh, G.; Sahu, S. Review on “Really Simple Syndication (RSS) Technology Tools”. In Proceedings of the IEEE International Conference on Computational Intelligence & Communication Technology, Ghaziabad, India, 13–14 February 2015; pp. 757–761. [Google Scholar]
- Zanella, A.; Bardella, A. RSS-Based Ranging by Multichannel RSS Averaging. IEEE Wirel. Commun. Lett. 2014, 3, 10–13. [Google Scholar] [CrossRef]
- Shi, L.-F.; Wang, Y.; Liu, G.; Chen, S.; Zhao, Y.; Shi, Y.-F. A Fusion Algorithm of Indoor Positioning Based on PDR and RSS Fingerprint. IEEE Sens. J. 2018, 18, 9691–9698. [Google Scholar] [CrossRef]
- Ni, T.; Su, S.; Cheng, A.; Lu, S.; Su, T.; Chang, C.C.; Fang, D.; Tai, J. “Challenge of 12” CIS CSP development, explore via finite element method. In Proceedings of the 2015 10th International Microsystems, Packaging, Assembly and Circuits Technology Conference (IMPACT), Taipei, Taiwan, 21–23 October 2015; pp. 281–284. [Google Scholar]
- Gharat, V.; Colin, E.; Baudoin, G.; Richard, D. Indoor performance analysis of lf-rfid based positioning system: Comparison with uhf-rfid and uwb. In Proceedings of the IEEE Indoor Positioning and Indoor Navigation Conference (IPIN 2017), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Dardari, D.; Win, M. Threshold-based time-of-arrival estimators in UWB dense multipath channels. In Proceedings of the 2006 IEEE International Conference on Communications, Istanbul, Turkey, 11–15 June 2006; pp. 4723–4728. [Google Scholar]
- Lymberopoulos, D.; Liu, J. The microsoft indoor localization competition: Experiences and lessons learned. IEEE Signal Process. Mag. 2017, 34, 125–140. [Google Scholar] [CrossRef]
- Schroeer, G. A Real-Time UWB Multi-Channel Indoor Positioning System for Industrial Scenarios. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–5. [Google Scholar]
- Otim, T.; Díez, L.E.; Bahillo, A.; Iturri, P.L.; Falcone, F. Effects of the Body Wearable Sensor Position on the UWB Localization Accuracy. Electronics 2019, 8, 1351. [Google Scholar] [CrossRef] [Green Version]
- Perez-Cruz, F.; Lin, C.-K.; Huang, H. BLADE: A Universal Blind Learning Algorithm for ToA Localization in NLOS Channels. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Horiba, M.; Okamoto, E.; Shinohara, T.; Matsumura, K. An improved NLOS detection scheme using stochastic characteristics for indoor localization. In Proceedings of the 2015 International Conference on Information Networking (ICOIN), Siem Reap, Cambodia, 12–14 January 2015; pp. 478–482. [Google Scholar]
- Liu, F.; Li, X.; Wang, J.; Zhang, J. An Adaptive UWB/MEMS-IMU Complementary Kalman Filter for Indoor Location in NLOS Environment. Remote Sens. 2019, 11, 2628. [Google Scholar] [CrossRef] [Green Version]
- Gao, H.; Li, X. Tightly-Coupled Vehicle Positioning Method at Intersections Aided by UWB. Sensors 2019, 19, 2867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferreira, A.G.; Fernandes, D.; Catarino, A.P.; Monteiro, J.L. Performance Analysis of ToA-Based Positioning Algorithms for Static and Dynamic Targets with Low Ranging Measurements. Sensors 2017, 17, 1915. [Google Scholar] [CrossRef] [PubMed]
- Shah, S.; Demeechai, T. Multiple Simultaneous Ranging in IR-UWB Networks. Sensors 2019, 19, 5415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barua, B.; Kandil, N.; Hakem, N. On performance study of TWR UWB ranging in underground mine. In Proceedings of the 6th International Conference on Digital Information, Networking, and Wireless Communications, Beirut, Lebanon, 25–27 April 2018; pp. 28–31. [Google Scholar]
- Wang, X.; Wang, Z.; Dea, B. A TOA based location algorithm reducing the error due to non-line-of-sight (NOLS) propagation. IEEE Trans. Veh. Technol. 2003, 52, 112–116. [Google Scholar] [CrossRef]
- Kwak, M.; Chong, J. A new double two-way ranging algorithm for ranging system. In Proceedings of the IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 24–26 September 2010; pp. 470–473. [Google Scholar]
- Wang, G.; Cai, S.; Li, Y.; Ansari, N. A Bias-Reduced Nonlinear WLS Method for TDOA/FDOA-Based Source Localization. IEEE Trans. Veh. Technol. 2016, 65, 8603–8615. [Google Scholar] [CrossRef]
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Wang, J.; Ye, H.; Li, J. Semi-Autonomous Coordinate Configuration Technology of Base Stations in Indoor Positioning System Based on UWB. Electronics 2020, 9, 33. https://doi.org/10.3390/electronics9010033
Yang X, Wang J, Ye H, Li J. Semi-Autonomous Coordinate Configuration Technology of Base Stations in Indoor Positioning System Based on UWB. Electronics. 2020; 9(1):33. https://doi.org/10.3390/electronics9010033
Chicago/Turabian StyleYang, Xiaofei, Jun Wang, Hui Ye, and Jianzhen Li. 2020. "Semi-Autonomous Coordinate Configuration Technology of Base Stations in Indoor Positioning System Based on UWB" Electronics 9, no. 1: 33. https://doi.org/10.3390/electronics9010033