1. Introduction
Direct current (DC) network systems are being analyzed and explored for use in future transmission and distribution technology due to advancements and maturity in the power electronic devices. Medium-voltage DC (MVDC) systems fill the gap in transmission and distribution areas, improving efficiency and energy delivery. In the future, MVDC grids would be the most flexible technique to collect renewable energy (e.g., solar, wind farms) and within industrial and urban area distribution networks. DC–DC high-power converters play a major role in the interconnection to MVDC grids, which must be capable to deal with unidirectional or bi-directional power flows. Compared to the medium-voltage alternating current (MVAC) system, the MVDC system shown in
Figure 1 reduces cable weight, avoiding voltage dip problems at many points and easily parallels generators [
1,
2,
3,
4,
5,
6,
7,
8]. Moreover, most equipment in use employs DC; therefore, conversion stage losses will be reduced, and as a result the economy and efficiency could be improved [
9]. However, MVDC acts as a foundation for developing a smart transportation system, which includes all electric trains, vehicles, planes and ships. Industrially, the first MVDC link between the UK and North Wales has recently been announced. The DC ANGLE project connects to the island of Anglesey by the Llanfair PG substation and to the North Wales mainland with Bangor operating at 27 kV DC along a 30.5 MW rating [
10,
11]. Due the recent development of new silicon carbide (SiC)-based semiconductor power devices, their use in markets is increasing due to their effectiveness and useful properties, such as significantly reducing conduction losses and switching losses in power converters, as well as improving converter efficiency. Thus, in many applications they would considered as an alternative to Si [
12,
13,
14,
15,
16,
17,
18]. Currently, power semiconductor devices in the market (e.g., (SiC) silicon carbide MOSFET, Insulated Gate Bipolar Transistors (IGBTs)) are still expensive as compared to traditional Si (silicon). Consequently, this increases the cost of system, especially for higher-power converters that require a large number of power semiconductor devices. However, reducing the number of wide-bandgap (WBG) devices used in power converters will go a long way in the present industry in reducing costs [
19].
In MVDC systems, the DC–DC converter is a key element, which acts as a transformer in current AC systems. The DC-based system performance depends on the DC converters because converters are responsible for changing voltage levels between the DC-based systems and delivering power. Therefore, the DC–DC converter has good reliability and performance, as needed for DC grids [
10,
20]. The DC–DC converter, which acts as the DC transformer, is one of the major key components in modern DC power grids and is connected to DC lines with variable voltage levels to make a DC network [
21,
22]. The MVDC DC–DC converter has drawn much attention in recent years; however, there are a number of major issues including protection and fault isolation, DC voltage regulation, output voltage control, voltage dip control, maintaining reliability and interconnecting different power lines [
22,
23,
24,
25,
26]. All these DC–DC converters would have regulation capabilities, which provides balanced and stable voltage for back-end converters, improving system reliability and over-current control ability. In the MVDC power converters, Modular Multilevel Converter (MMC), flying capacitor, cascaded neutral point clamping (NPC) or active NPC (ANPC) topologies are usually used [
27,
28]. With an auto-transformer controlling two line-commutated current-sourced converters (LCCs), issues such as high-voltage DC (HVDC) interconnections, unreliability and power flow control are presented in [
29]. Interactions between the boost converter and disturbance rejection have been shown [
30]. Bi-directional DC–DC high-efficiency interconnections in MVDC and HVDC converters have been discussed in combination with two-level MMCs [
31,
32,
33]. Modeling of MVDC multidrive systems for power quality analysis and harmonic injection is discussed in [
34]. Robust voltage control and parametric uncertainties considering DC–DC converters are shown in [
35]. A practical DC fault ride-through method for MMC-based MVDC distribution systems is proposed in [
36]. For future distribution networks, a new, fast-acting backup protection strategy for embedded MVDC links is suggested in [
37]. Modeling of the power SiC MOSFET module and predicting electromagnetic interference (EMI) of MVDC railway electrification system are shown in [
38]. A wide-bandgap heterogeneous power device for high-frequency applications was discussed in [
39]. Fault-tolerant operations for different modes of MVDC are suggested in [
32,
40]. In [
41], a three-phase triple-active bridge converter interconnected with the MVDC grid along two nominal voltages is described. However, comparisons of disturbance rejection, uncertainty and power losses for MVDC-based converters are not addressed in these works.
In [
14], the control variable is set as the square of the DC-bus voltage, and DC-bus voltage is set as the control variable compared to the conventional method. In the present topology, the outside voltage control loop (in which the capacitance energies are analyzed as variable) method is suggested because it can minimize stress to the capacitance voltage and reduce capacitance voltage deviations. The current topology is for industrial applications that work with step-down voltages of DC voltage 10 kV to 400 V and 500 V. The proposed study is composed of two parts. In the first part, the performance and control scheme is articulated for multiport DC–DC, an interconnections between the two converters are presented. A three-level neutral point clamping (NPC) is used on the high-voltage (HV) side, and a two-level phase is used on the low-voltage (LV) side along a rectifier circuit using two high-frequency transformers (HFT), including two nominal voltages as shown in the block diagram in
Figure 2. The HV side provides a nominal voltage of 10 kV, while the LV side provides a nominal voltage of 400 V DC and 500 V DC, respectively (system overview is shown in
Table 1). On the LV side, in designing the new and effective control strategy, the conditions of load disturbance voltage fluctuations and non-serious voltage dips are taken into consideration. In this study the double-closed-loop control topology is used inside the current loop and outside the voltage loop control; the outer voltage loop control comprises two parts: the inner current loop is decoupled without an exact boost inductance value, and the voltage control loop is proposed in which the capacitance energy is analyzed as a variable. Provided a constant 400 V and allowing 2.3% variation during parallel load changing (according to the IEEE standard, 5% variation is acceptable [
42]), the simulation results have shown that the proposed control topology is effective. The focus of this study is mainly on the LV side.
In the second part of the paper, SiC and Si semiconductor power devices are compared, in which the conduction loss and switching loss, wide range of switching frequencies, cost comparisons and overall performance are evaluated. An accurate mathematical model was developed to represent the DC–DC converter in which efficiency is measured by using the equations presented in
Appendix A under 75% and full-resistive load conditions. Simulations were carried out in LTSpice software. Although SiC power devices have multiple benefits in several applications, this article is focused on enhancing the efficiency of DC–DC bidirectional converters.
This study is organized as follows: in
Section 2, the proposed control topology configuration on the LV side is presented. In
Section 3, the simulation results of the proposed converter are discussed. In
Section 4, the comparisons of power semiconductor devices and loss calculations in different load conditions are presented. Finally, in
Section 5 the efficiency and cost comparisons are discussed in detail.
3. Mathematical Model on the LV Side
Figure 4 [
43] shows the power circuit of the three-phase voltage source rectifier topology. When designing this mathematical model we assumed a balanced three-phase system.
In the above figure, , and are the source voltages; , and are the line current; , and are the input rectifier voltage; is DC output voltage; r is the resistance of the filter reactor; L is inductance of the filter reactor; is load resistance; is load current; – are IGBTs; (j = 1–6) are switching functions,
The definition of switching function is
The three-phase model of the voltage-sourced Pulse Width Modulated (PWM) rectifier can be expressed in the stationary a-b-c frame as (1), when the three-phase AC sources are balanced and the resistance of the power circuit is ignored.
The symmetry of the three-phase current and voltage is
Performing the park transformation, the mathematical model in the synchronous
rotating frame can be expressed as
where
,
and
,
are input voltages and switching function of the rectifier in synchronous rotating
coordinates, respectively.
3.1. LV Side Control Design and Mathematical Model
At present, advanced modern control theory is growing rapidly, which has led to new ideas and thinking to solve complex problems. However, many of the control strategies are more difficult to implement in the industrial applications. Relatively, in various control systems the conventional proportional–integral (PI) controller is widely used due to its robustness and briefness. Based on internal modern theory,
Figure 5 shows the diagram of the controller. For sufficient and essential conditions for zero-state error, the closed loop contains
as the input generation model. Therefore, the open loop transfer function is
=
and also must have the input generation model.
Based on the internal model theory perspective, the zero steady-state error can be secured using the conventional PI controller, while the integration part contains s domain in the 1/s step signal. Therefore, to achieve the steady-state error the controller must contain a /( + ) part when the input signal is a sinusoidal , for example (t), where the resonant controller is compulsory.
3.2. Design of Inner Current Loop
Figure 6 [
44] shows the model of the three-phase voltage sourced rectifier
frame.
Based on the synchronous
rotating frame, the three-phase voltage-sourced rectifier and conventional control PI theory, the internal current loop is designed as follows:
Figure 7 shows the obtained synchronous
rotating frame and decoupling control diagram of the internal current loop. By using a conventional PI controller, the zero steady-state error can be secured because in the synchronous
rotating frame the reference current is the constant DC signal.
Therefore, to completely decouple the axis, the exact value of inductance L is essential. In some extreme conditions the value of inductance L will be changed; thus, part of the decoupling is often ignored. Hence, the enhanced coupling on the axis will lead to bad performance when the frequency increases.
With the model of the a-b-c three-phase rectifier, a two-phase
reference frame model is obtained.
Using the complex vector, the stationary reference frame model is shown in Equation (
8).
Thus, the model could be transformed into the rotating
synchronous frame by replacing “d/dt” with “d/dt+j
” as shown in Equation (
9).
The model can also be shown as
Transforming into the
s domain, the model can be shown as
Equation (
11), therefore in the synchronous reference frame, shows the plant has only one complex pole found at -
-
j. Hence, by choosing the proper parameters, the PI conventional controller would be zero, and approximately cancel the plant pole. In Equation (
12) the controller is found as
Based on the complex vector perspective, the rectifier model transforms the single-input single-output (SISO) model as of the double-input double-output (DIDO) model.
Figure 8 shows the block diagram of the obtained decoupling control.
It can be observed in
Figure 8, without an exact and accurate value of inductance, that good performance could be attained. The
and
parameters can be selected by following the conventional PI controller.
Hence,
=
by selecting proper value of
, and a proper cutoff frequency can be chosen, as mentioned in
Table 1.
3.3. Design Outer Voltage Loop
In consonance with the power-balancing principle, avoiding the losses in the rectifier, we take
The active input power is
The equation in the synchronous
reference frame turns into
where
,
(
k =
) are reactive and active elements of the input current and voltage in the
synchronous frame. The DC side power can be described as
Equation (
16) is equal to Equation (
17), then
From Equation (
18), it can be seen that there are nonlinear items (i.e., the output voltage is squared, and it becomes a differential when multiplying the output voltage), which shows nonlinear relations among
and
,
.
The d-axis is commonly put in the same direction as the voltage vector in the synchronous
reference frame. If the maximum value of three-phase voltage is
, its symmetrical phase will be
where
= 0. Thus, the
output voltage is calculated with only the variable
, and there is nonlinear relation among them.
In this study, the outer voltage control loop, a control scheme in which the capacitor energy is treated as a variable, is discussed. As there is a linear relation between the active current and capacitor energy, the system has great control characteristics with a simple PI controller. First, we analyze and transform the rectifier voltage, as shown in Equation (
18).
The equation will be
where
If Equation (
19) is put into Equation (
24), then we obtain
Equations (
22) and (
23) define the capacitor output energy. If
, the capacitor energy, is considered as a new control variable, a linear relation will exist between
and
, which is presented in Equation (
25). The transformer function between the active current and capacitor current can be defined as
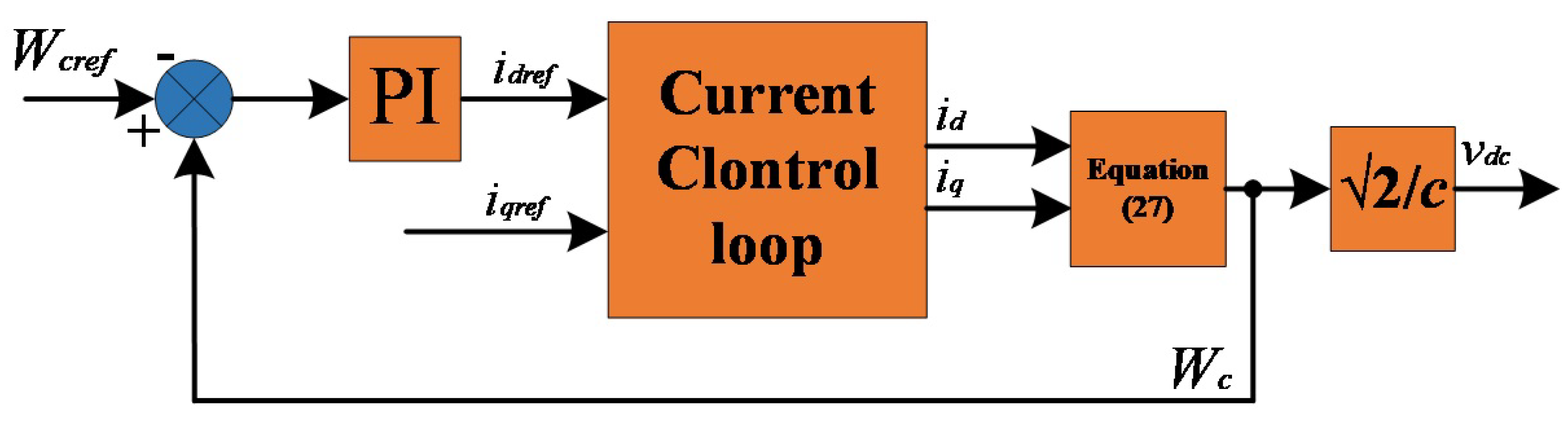
Capacitor energy is considered as a variable, and in the outer loop a linear PI regulator is used. If the capacitor energy is defined as
= 1/2
and the DC voltage reference is
, the control system structure will be as shown in
Figure 9.
The PI regulator transform function is described as
While selecting the controller in the double-closed-loop control system, it can be assured that the bandwidth of the internal current loop is wider than that of the outer voltage loop when examining the outer voltage control loop. In addition, the responding behavior of the current is quick enough to ignore the delay.
The closed-transform function system is defined as
It is observable that the closed-loop transform function of capacitor energy is a second-order linear system. When S→0, the gain function will be /→1, with a step response, which shows that the capacitor’s steady-state error and the steady-state error of the voltage are zero.
4. Simulation Results
To demonstrate the effectiveness and accuracy of the suggested control system for the DC–DC converter, simulations are carried out in MATLAB/Simulink software (MathWorks Inc, Natick, MA, USA), and parameters are specified in
Table 1. First, on the HV side, the port (I) input DC voltage is a 20 kV waveform. Using the SVPWM technique, the line voltage modulation index is 0.8. After passing through the passive LC filter by reducing harmonics, the sinusoidal AC output of the 10 kV waveform is as shown in
Figure 10. On the LV side, the port (III) input AC is 10 kV, and the line voltage, phase voltage and output constant 400 V are as shown in
Figure 11.
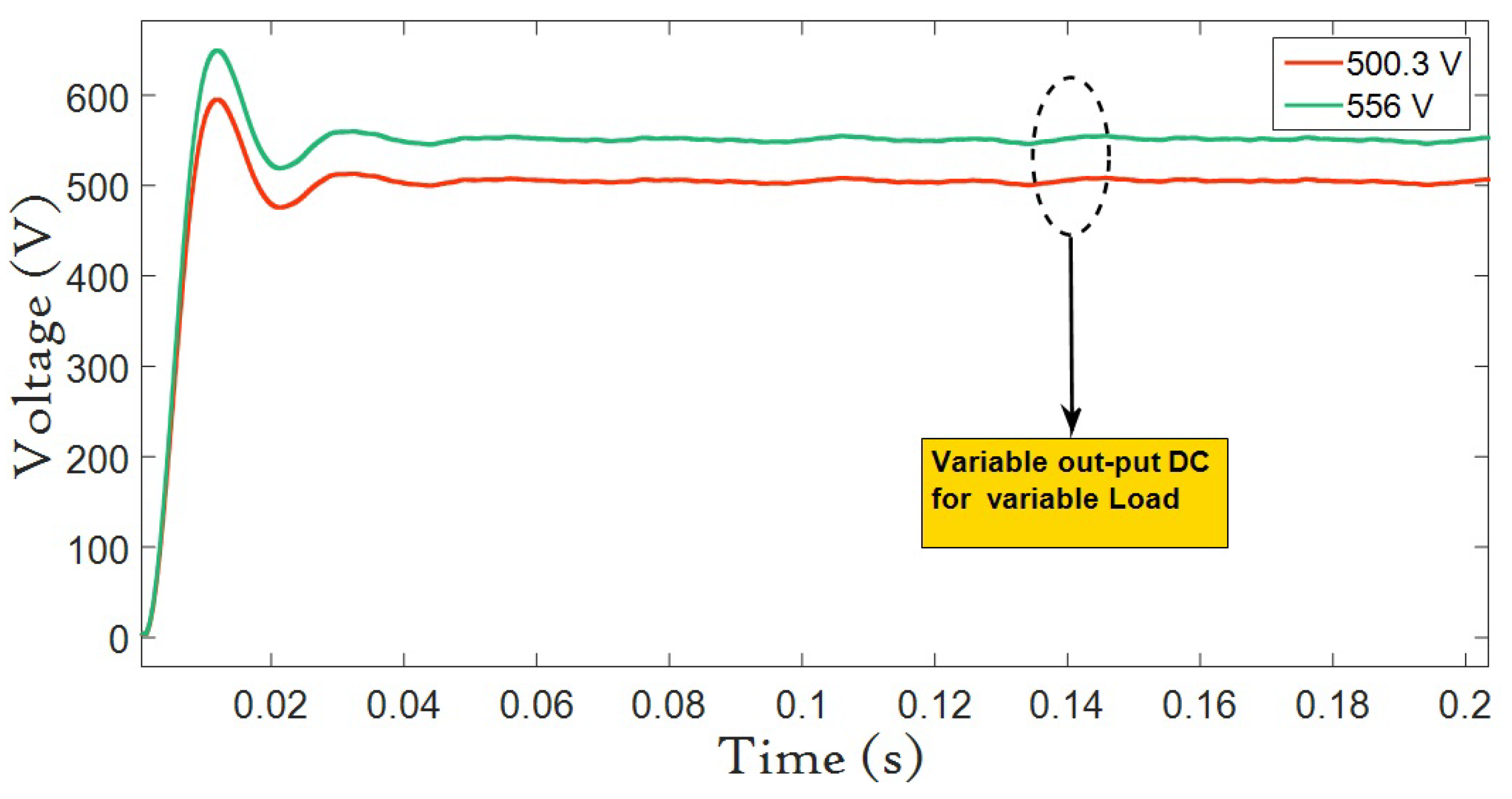
Figure 12 shows the different effects of loads when the load changes in parallel, and only 2.3% load variations will be accepted (according to IEEE standard, 5% variation is acceptable [
44]). The output from port (II) 500 V variable output is shown in
Figure 13, which changes according to load variation. Three-phase voltage and PQ are shown in
Figure 14. The DC voltage waveform results are compared with [
45]. We notice that the load changed from 50
to 100
at 0.14 s and is shown in
Figure 15. The DC voltage reduced, there was a slight voltage dip, and then it tracked back to its original condition. It can be examined that the proposed topology is effective in conditions of uncertain load disturbances. The robustness of the suggested control system is proved, and the bidirectional power flow waveform for the current and voltage are clearly seen
Figure 16. In
Figure 17, the capacitor energy is shown as a variable. The simulation results show that the overshoot of the output voltage is reduced more than 70 V, so the control system has a superior performance.
7. Conclusions
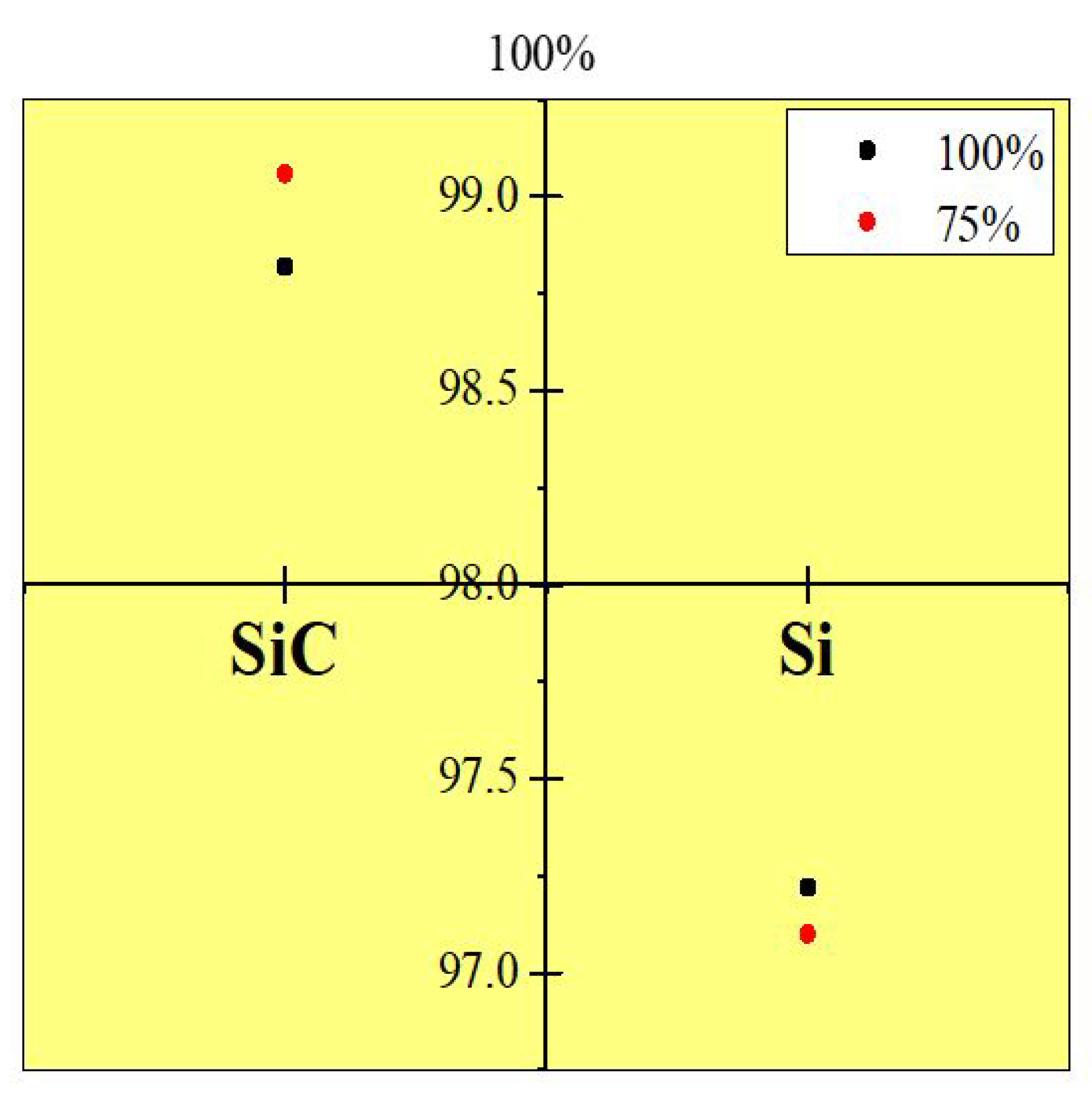
A comprehensive performance study of a proposed MVDC DC–DC three-level converter has been presented. The suggested multi-port converter on the LV side provides two nominal voltages of 400 V (constant) and 500 V (variable), respectively. A novel and effective double-closed-loop control strategy on the LV side was analyzed in two scenarios. In a voltage control scheme, according to the investigation, the capacitor energy is analyzed as a variable, and the dynamic response of the output voltage is improved. An inner current loop control was also analyzed without an exact inductance value in complex vector frame. When designing the controllers, uncertain load disturbances during voltage dips were taken into account. The simulation results demonstrate that the fluctuations and voltage dips can be controlled effectively by applying the proposed control topology. Consequently, this topology is effective and applicable to enhance the robustness and energy conversation of a system. In the second portion, a comparison study between new SiC and Si semiconductor power devices is given. Test simulations for both devices were built and verified. The performance and operation of semiconductors were compared at different specifications, and conduction loss switching loss, wide range of switching frequencies, cost comparisons and overall performances were evaluated. The efficiency of the SiC-based converter was found above 99% under two resistive load conditions, which shows the efficiency of the SiC-based converter is 1.85% higher than that of Si. SiC MOSFET can also operate at higher temperatures, and less cooling is required because of the decrease in device losses. Costs of both devices were compared. SiC drivers are expensive, but the cooling requirement for Si is much greater than that of SiC; thus, the cost difference is not a big barrier. The outcomes of this study are valid for all kinds of DC–DC converters used in numerous other applications. Therefore, this study is helpful to enhance the reliability, and improve the overall efficiency, of converters that can be derived in the future.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}