A General Double Vector-Based Model Predictive Current Control for the Dual Three-Phase Motors


Abstract
:1. Introduction
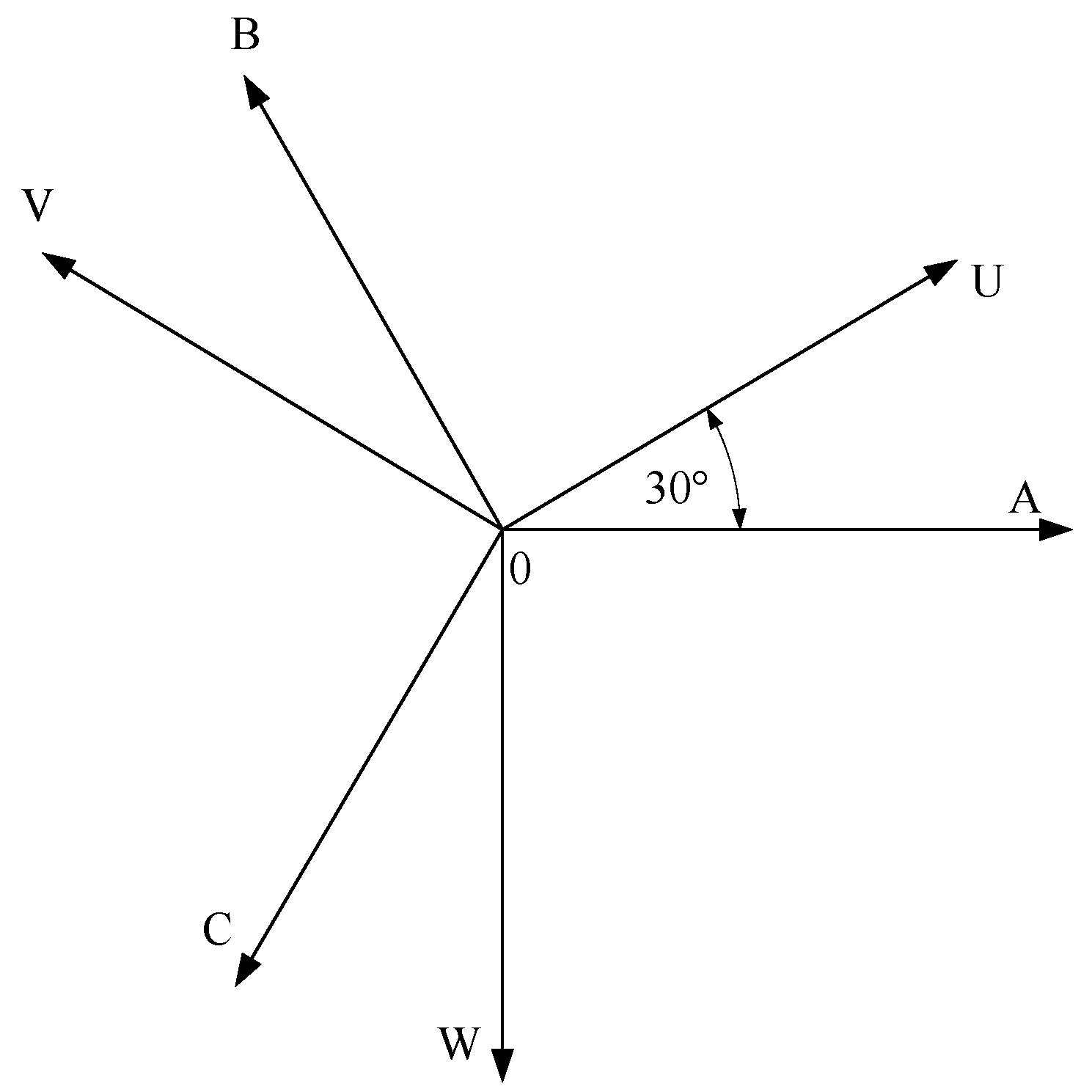
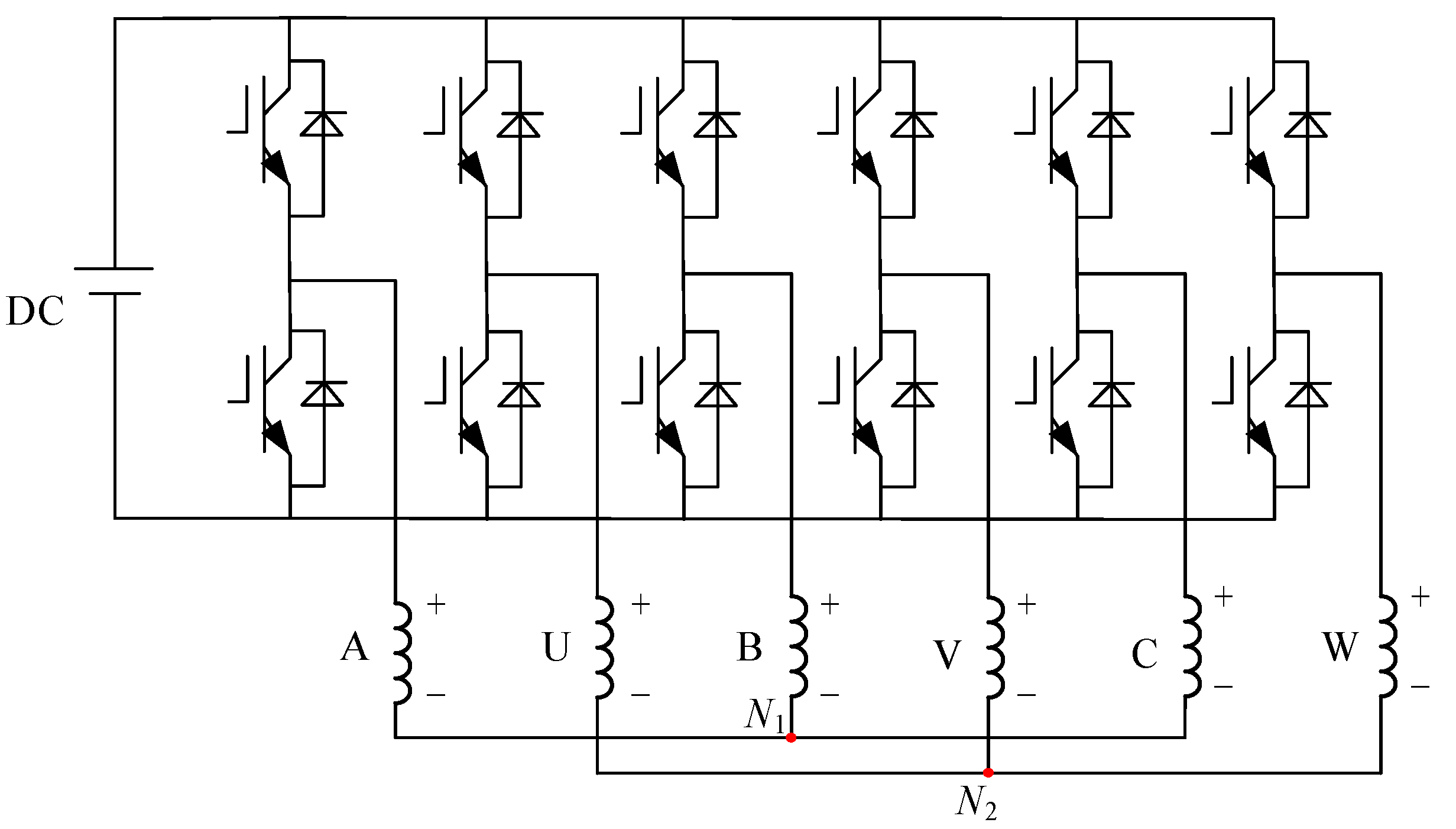
2. Discrete Mathematical Models of Dual Three-Phase PMSM
3. Traditional and Duty Cycle MPCC Strategies
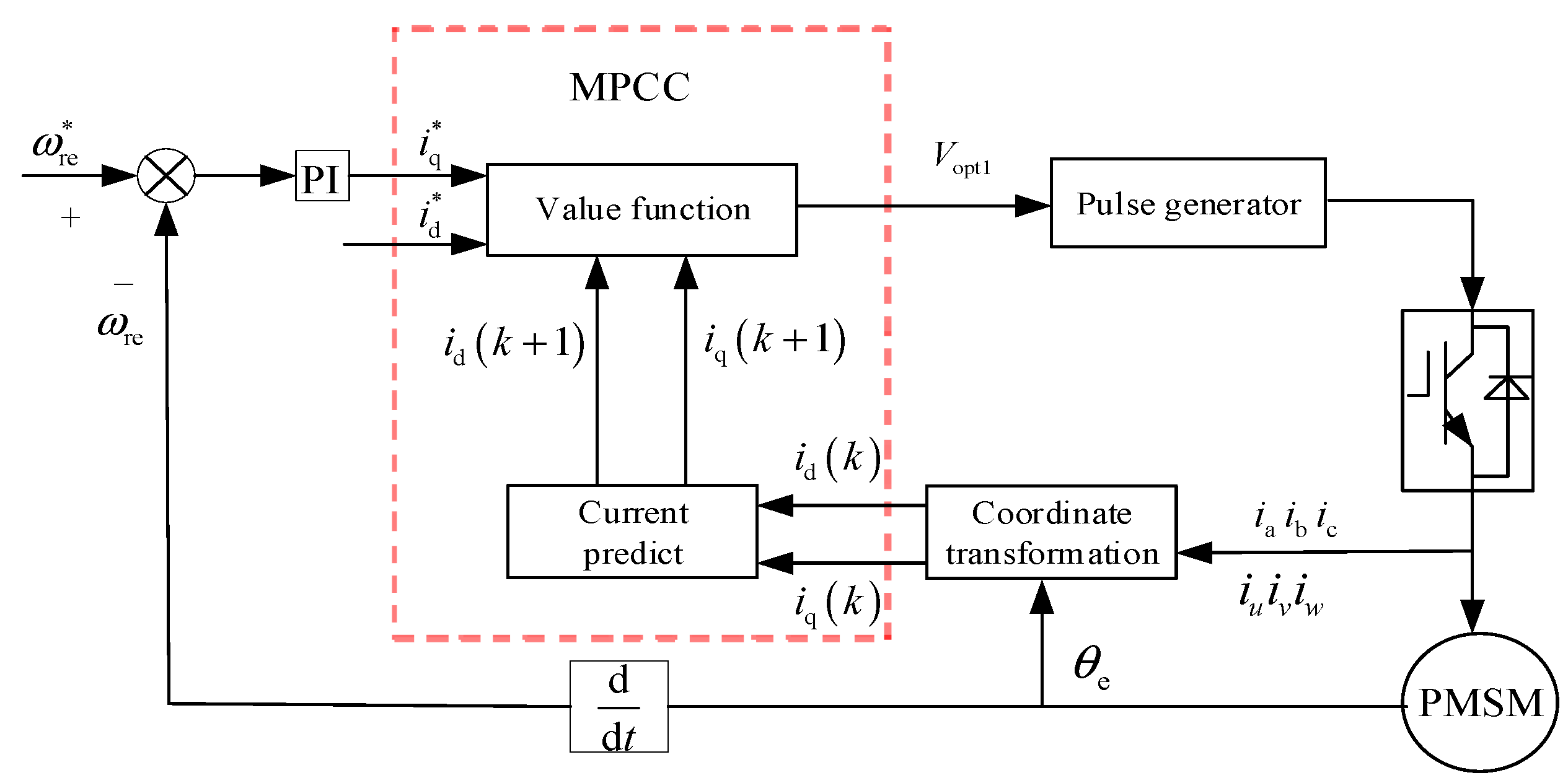
3.1. Traditional MPCC
3.2. Duty Cycle MPCC
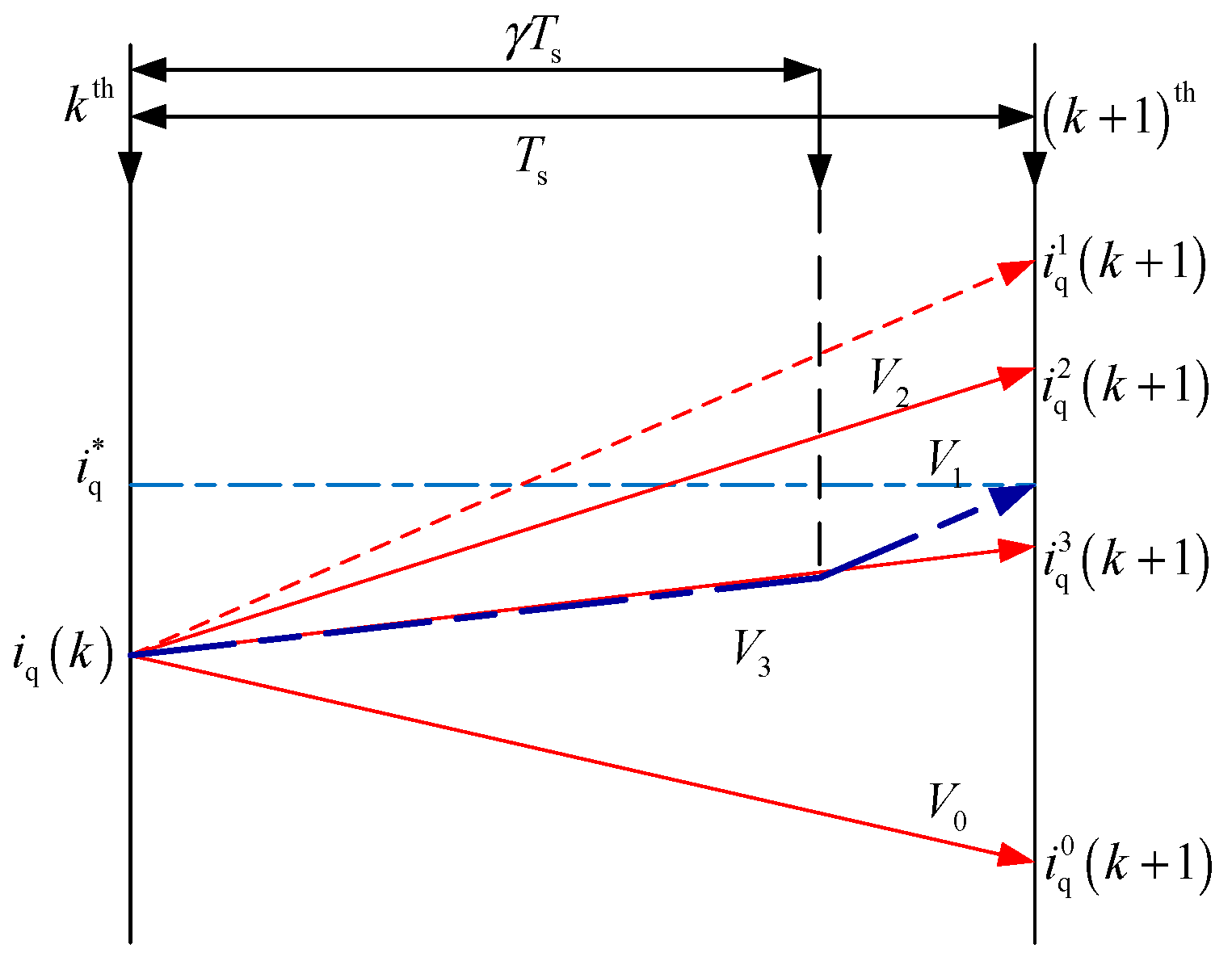
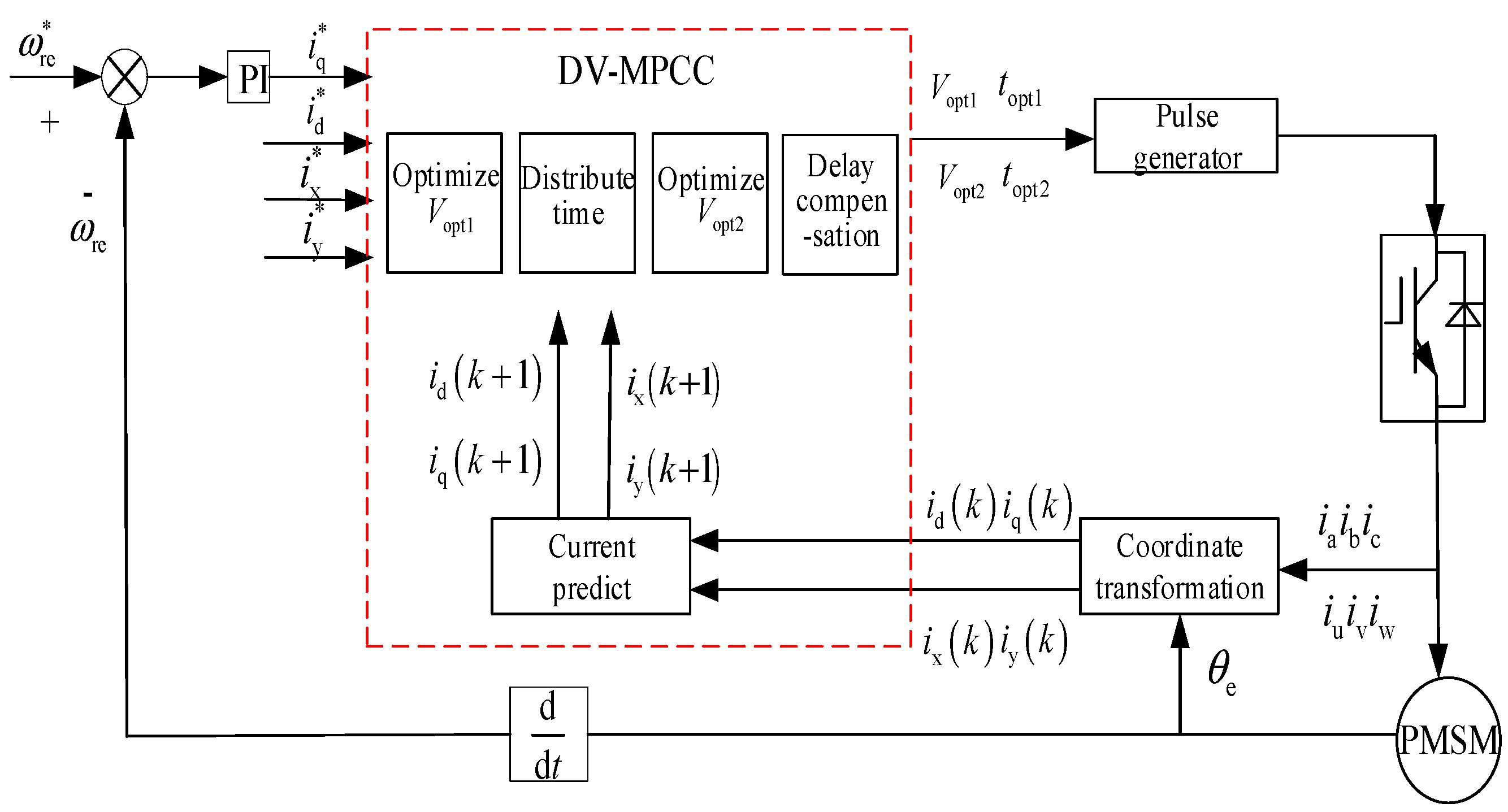
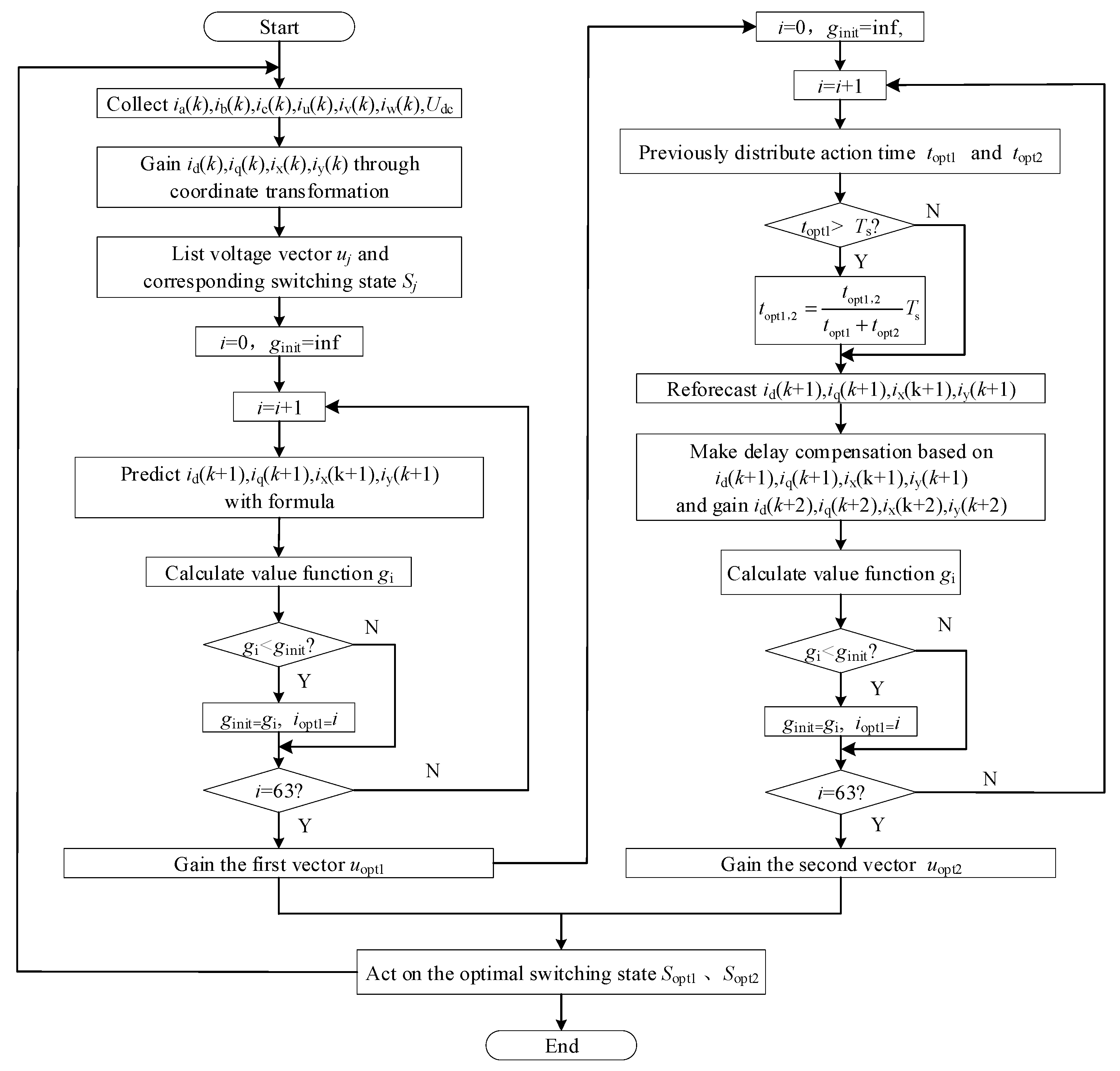
4. General Double Vector-Based MPCC Strategy
4.1. Control Principle
4.2. Distribution of Action Time
4.3. Cost Function Design
4.4. Delay Compensation
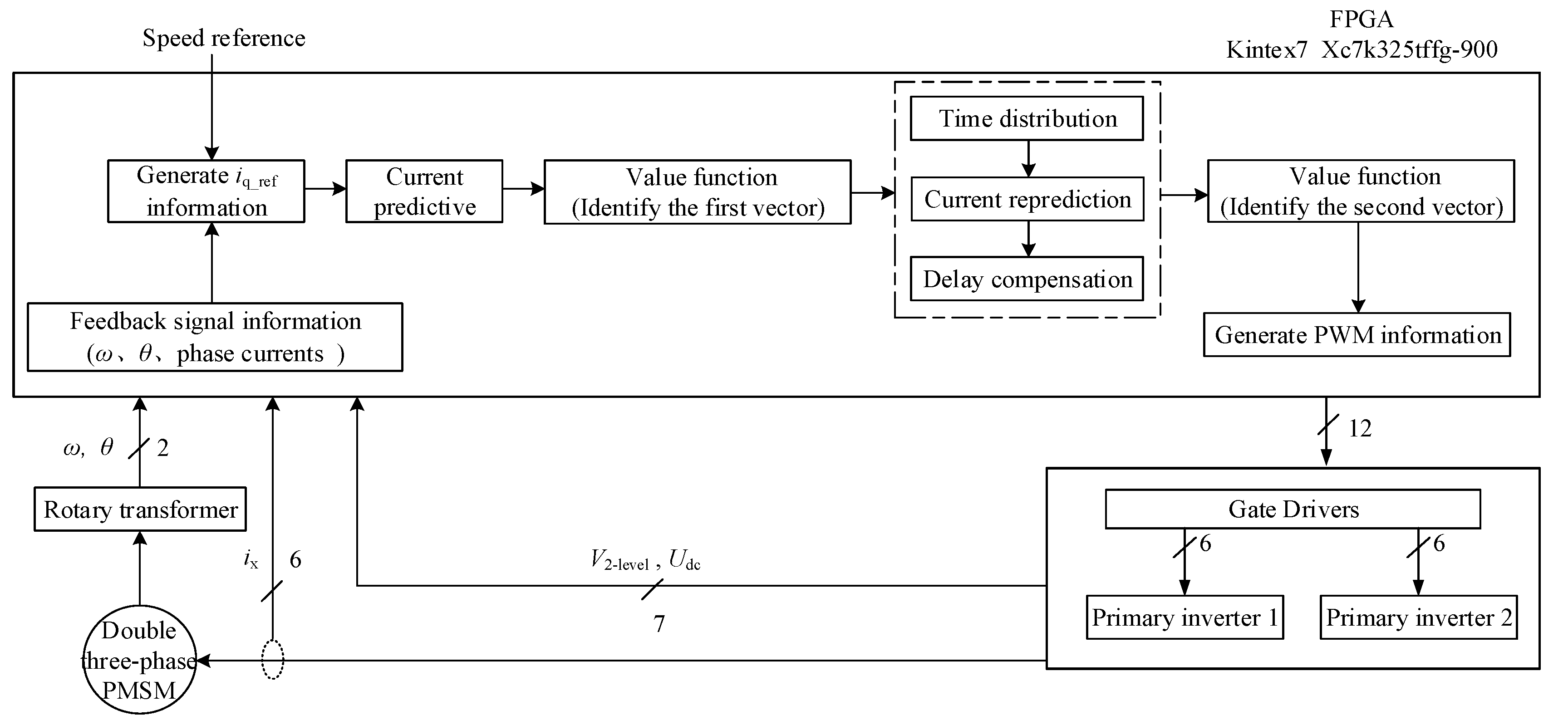
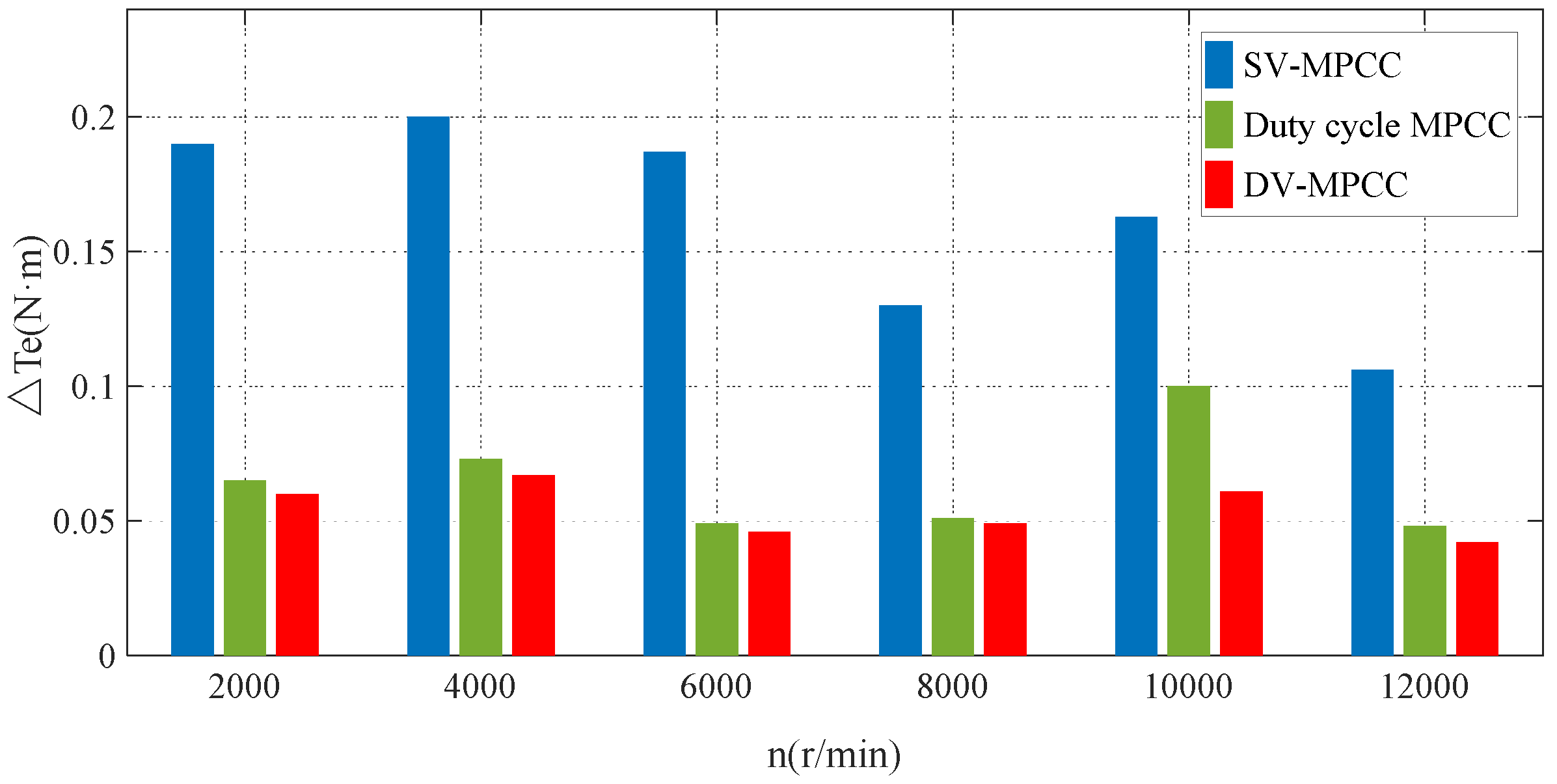
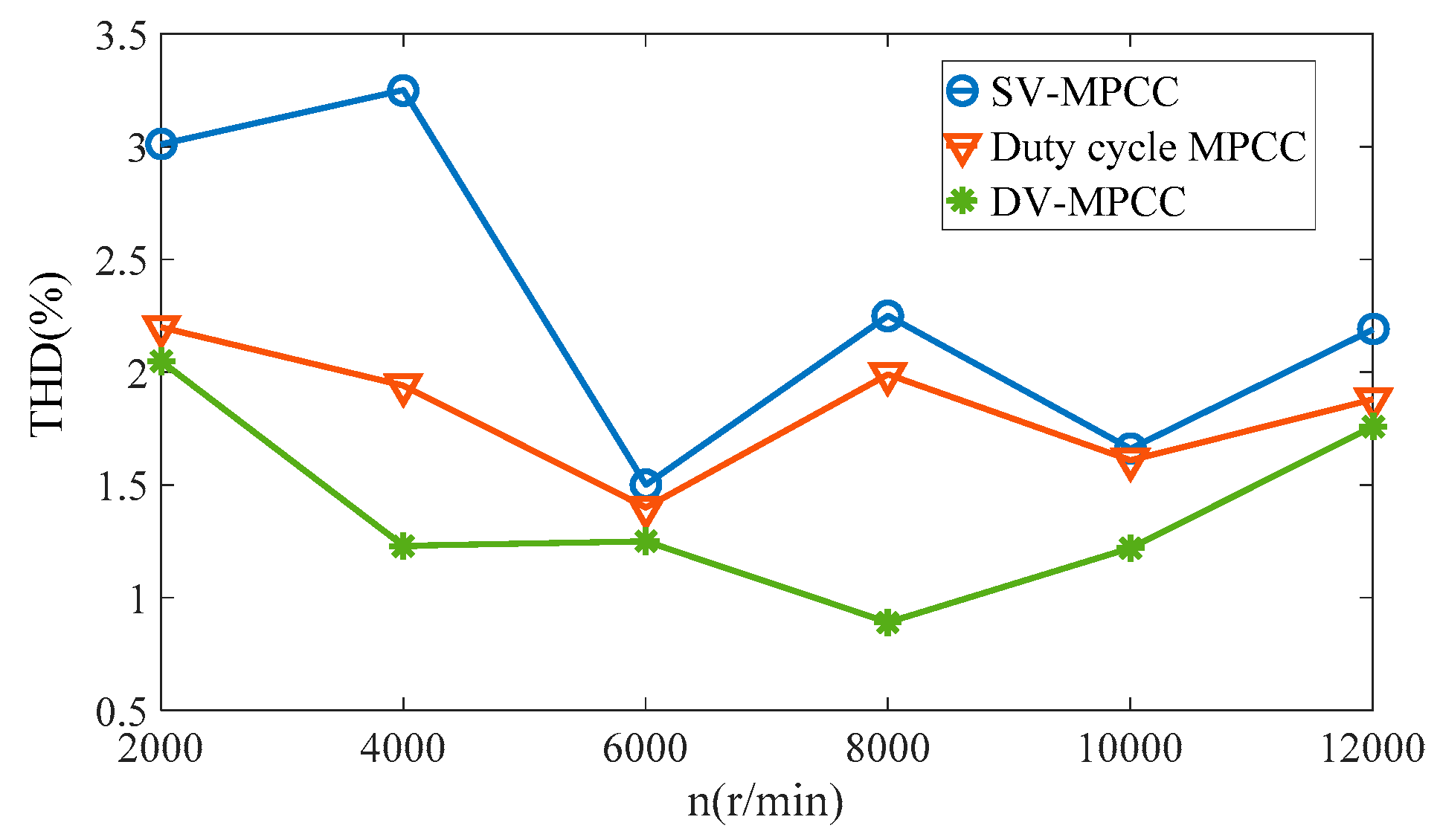
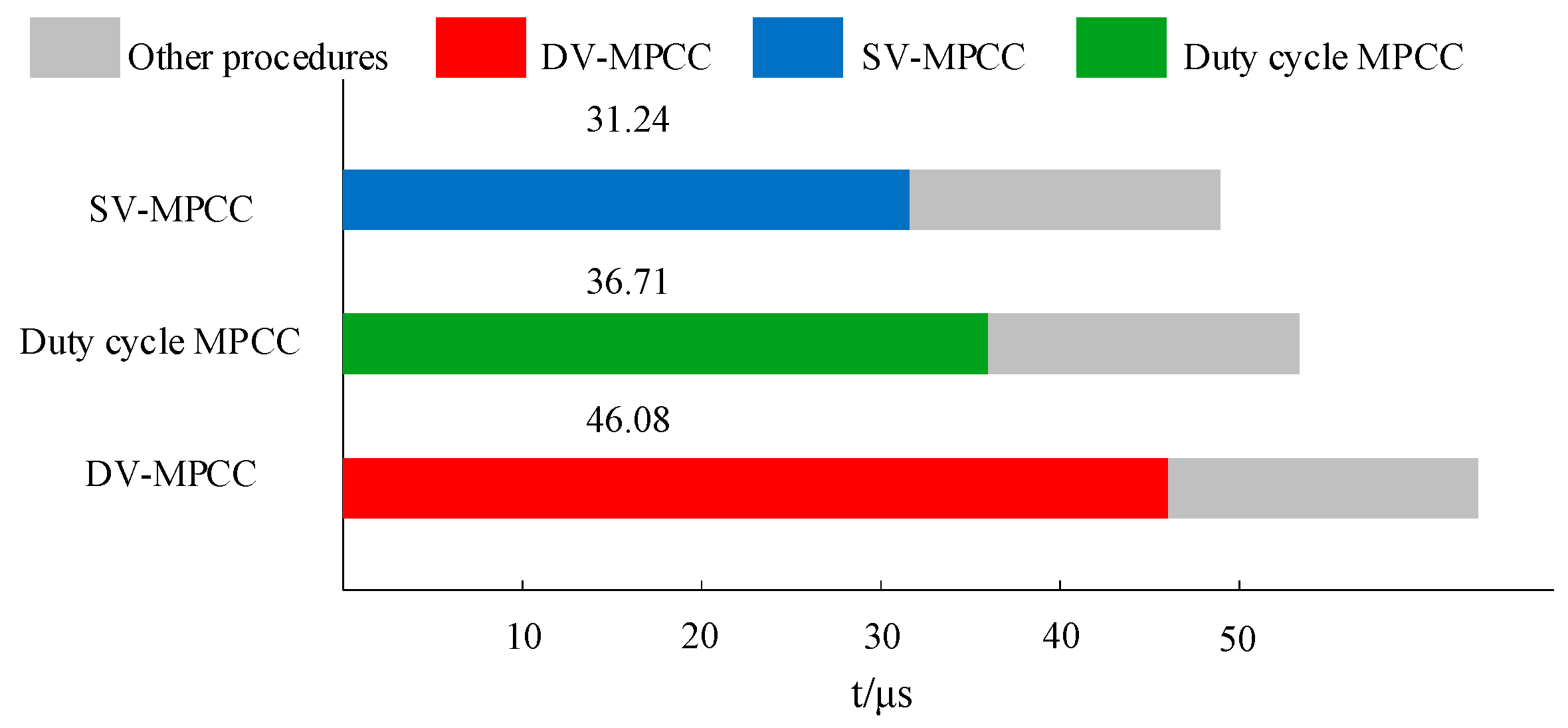
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ho Pham, H.A.; Pham, Q.K.; Cao, V.K. Advanced PMSM machine parameter identification using modified Jaya algorithm. In Proceedings of the 2019 International Conference on System Science and Engineering (ICSSE), Dong Hoi City, Vietnam, 19–21 July 2019; pp. 445–450. [Google Scholar] [CrossRef]
- Fernando, B.; Jesus, D.; Alejandro, G.Y.; Oscar, L.; Diego, P. Control strategy for multiphase drives with minimum losses in the full torque operation range under single open-phase fault. IEEE Trans. Power Electron. 2017, 32, 6275–6285. [Google Scholar] [CrossRef]
- Yu, B.; Song, W.; Tang, T.; Wang, S.; Yang, P. A finite control set model predictive current control scheme for five-phase PMSMs based on optimized duty ratio. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2564–2569. [Google Scholar] [CrossRef]
- Kamel, T.; Abdelkader, D.; Said, B. Vector control of five-phase permanent magnet synchronous motor drive. In Proceedings of the 4th International Conference on Electrical Engineering (ICEE), Boumerdes, Algeria, 13–15 December 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Pandit, J.K.; Aware, M.V.; Nemade, R.V.; Levi, E. Direct torque control scheme for a six-phase induction motor with reduced torque ripple. IEEE Trans. Power Electron. 2017, 32, 7118–7129. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Liu, C.; Yu, F. Predictive current control of a new three-phase voltage source inverter with phase shift compensation. IET Electr. Power Appl. 2017, 11, 740–748. [Google Scholar] [CrossRef]
- Tu, W.; Luo, G.; Zhang, R.; Chen, Z.; Kennel, R. Finite-control-set model predictive current control for PMSM using grey prediction. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, IL, USA, 18–22 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xie, W. Low complexity model predictive control-single vector-based approach. IEEE Trans. Power Electron. 2014, 29, 5532–5541. [Google Scholar] [CrossRef]
- Morel, F.; Lin-Shi, X.; Retif, J.M.; Allard, B.; Buttay, C. A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive. IEEE Trans. Ind. Electron. 2009, 56, 2715–2728. [Google Scholar] [CrossRef] [Green Version]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Xie, W.; Li, Z.X.; Zhang, Y.C. Model predictive direct power control of a PWM rectifier with duty cycle optimization. IEEE Trans. Power Electron. 2013, 28, 5343–5351. [Google Scholar] [CrossRef]
- Xu, Y.P.; Zhang, B.C.; Zhou, Q. A model predictive current control method of PMSM based on the simultaneous optimization of voltage vector and duty cycle. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 881–884. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Gao, S.Y.; Liu, J.L. An improved model predictive control for permanent magnet synchronous motor drives. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1877–1883. [Google Scholar] [CrossRef]
- Xu, Y.P.; Zhang, B.C.; Zhou, Q. Dual vector model predictive current control for permanent magnet synchronous motor (PMSM). Trans. China Electrotech. Soc. 2017, 32, 222–230. [Google Scholar]
- Xu, Y.P.; Ding, X.H.; Wang, J.B.; Li, Y.Y. Three-vector-based low-complexity model predictive current control with reduced steady-state current error for permanent magnet synchronous motor. IET Electr. Power Appl. 2020, 14, 305–315. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Bogado, B.; Toral, S. Speed control of five-phase induction motors with integrated open-phase fault operation using model-based predictive current control techniques. IEEE Trans. Ind. Electron. 2014, 61, 4474–4484. [Google Scholar] [CrossRef]
- Huang, W.T.; Hua, W.; Chen, F.Y.; Yin, F.B.; Qi, J. Model predictive current control of open-circuit fault-tolerant five-phase flux-switching permanent magnet motor drives. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1840–1849. [Google Scholar] [CrossRef]
- Barrero, F.; Arahal, M.R.; Gregor, R.; Toral, S.; Duran, M.J. A proof of concept study of predictive current control for VSI-driven asymmetrical dual three-phase AC machines. IEEE Trans. Ind. Electron. 2009, 56, 1937–1954. [Google Scholar] [CrossRef]
- Barrero, F.; Arahal, M.R.; Gregor, R.; Toral, S.; Duran, M.J. One-step modulation predictive current control method for the asymmetrical dual three-phase induction machine. IEEE Trans. Ind. Electron. 2009, 56, 1974–1983. [Google Scholar] [CrossRef]
- Gregor, R.; Barrero, F.; Toral, S.L.; Duran, M.J.; Arahal, M.R.; Prieto, J.; Mora, J.L. Predictive-space vector PWM current control method for asymmetrical dual three-phase induction motor drives. IET Electr. Power Appl. 2010, 4, 26–34. [Google Scholar] [CrossRef] [Green Version]
- Duran, M.J.; Prieto, J.; Barrero, F.; Toral, S. Predictive current control of dual three-phase drives using restrained search techniques. IEEE Trans. Ind. Electron. 2011, 58, 253–3263. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Aciego, J.J.; Martin, C.; Barrero, F. Model predictive control of six-phase induction motor drives using virtual voltage vectors. IEEE Trans. Ind. Electron. 2018, 65, 27–37. [Google Scholar] [CrossRef]
- Barrero, F.; Prieto, J.; Levi, E.; Gregor, R.; Toral, S.; Duran, M.J.; Jones, M. An enhanced predictive current control method for asymmetrical six-phase motor drives. IEEE Trans. Ind. 2011, 58, 3242–3252. [Google Scholar] [CrossRef]
- Xu, Z.X.; Wang, Z.; Wang, X.Q. Predictive current control method for the T-type three-level inverters fed dual three-phase PMSM drives with reduced current harmonics. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi′an, China, 3–6 June 2019; pp. 115–121. [Google Scholar] [CrossRef]
- Davari, S.A.; Khaburi, D.A.; Kennel, R. An improved FCS–MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Power Electron. 2012, 27, 1540–1551. [Google Scholar] [CrossRef]
- Mamdouh, M.; Abido, M.A. Weighting factor elimination for predictive current control of asymmetric six phase induction motor. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, J.F.; Zhu, J.G.; Dorrell, D.G. Model predictive control of grid-connected inverters for PV systems with flexible power regulation and switching frequency reduction. IEEE Trans. Ind. Appl. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Gonçalves, P.F.; Cruz, S.M.; Mendes, A.M. Predictive current control of six-phase permanent magnet synchronous machines based on virtual vectors with optimal amplitude and phase. In Proceedings of the 2019 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Luo, Y.X.; Liu, C.H. Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor. IEEE Trans. Power Electron. 2019, 34, 6960–6972. [Google Scholar] [CrossRef]
- Gonçalves, P.F.C.; Cruz, S.M.A.; Mendes, A.E.M.S. Fixed and variable amplitude virtual vectors for model predictive control of six-phase PMSMs with single neutral configuration. In Proceedings of the 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, Australia, 13–15 February 2019; pp. 267–273. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rivera, M.; Rodríguez, J. A computationally efficient lookup table based FCS-MPC for PMSM drives fed by matrix converters. IEEE Trans. Ind. Electron. 2017, 64, 7645–7654. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Bai, Y.N.; Yang, H.T. A universal multiple-vector-based model predictive control of induction motor drives. IEEE Trans. Power Electron. 2018, 33, 6957–6969. [Google Scholar] [CrossRef]
- Yuan, L. Modern Permanent Magnet Synchronous Motor Control. Principle and MATLAB Simulation; Beijing Aerospace Univ. Press: Beijing, China, 2016. [Google Scholar]
- Cortes, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in model predictive control of power converters and drives. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pole paris np | 5 |
| d axis inductance Ld | 33 mH |
| q axis inductance Lq | 33 mH |
| Leakage inductance Lz | 3 mH |
| Permanent magnet flux ψf | 0.01215 Wb |
| Bus voltage Udc | 270 V |
| Stator resistance Rs | 0.08 Ω |
| Rated speed of motor n | 12,000 r/min |
| Strategy | ||
|---|---|---|
| SV-MPCC | 0.19 N∙m | 0.132 N∙m |
| Duty cycle MPCC | 0.065 N∙m | 0.077 N∙m |
| DV-MPCC | 0.06 N∙m | 0.063 N∙m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Q.; Ma, T.; Zhao, R.; Yang, Y. A General Double Vector-Based Model Predictive Current Control for the Dual Three-Phase Motors. Electronics 2020, 9, 2000. https://doi.org/10.3390/electronics9122000
Yuan Q, Ma T, Zhao R, Yang Y. A General Double Vector-Based Model Predictive Current Control for the Dual Three-Phase Motors. Electronics. 2020; 9(12):2000. https://doi.org/10.3390/electronics9122000
Chicago/Turabian StyleYuan, Qingqing, Ting Ma, Renji Zhao, and Yumei Yang. 2020. "A General Double Vector-Based Model Predictive Current Control for the Dual Three-Phase Motors" Electronics 9, no. 12: 2000. https://doi.org/10.3390/electronics9122000