How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers

 ,
,  , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
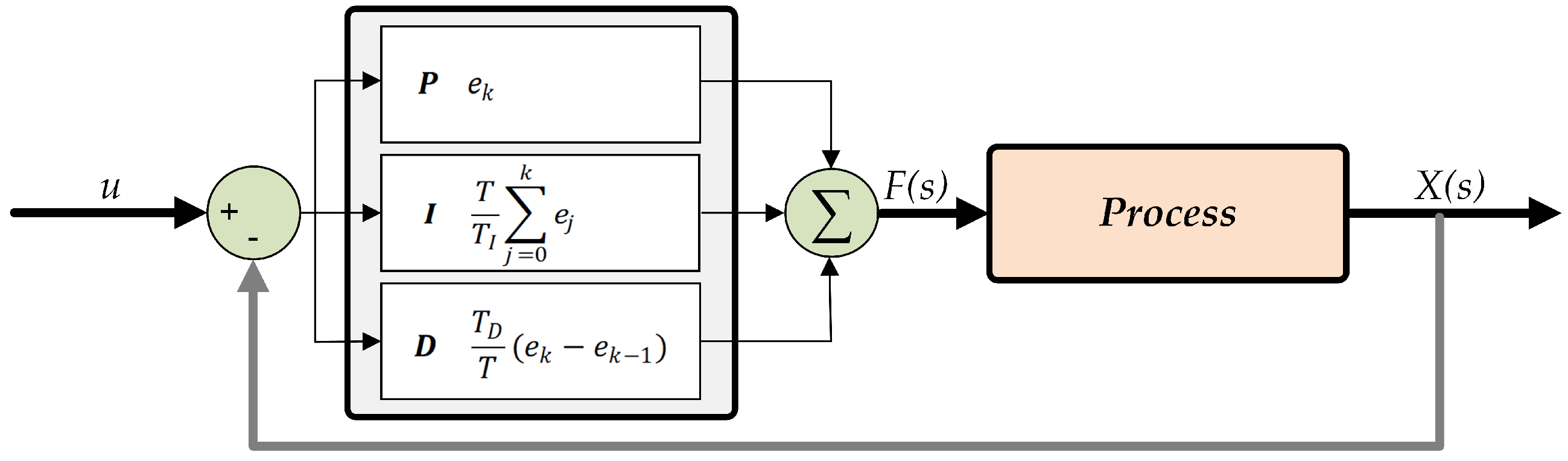
2. Pid Control
- P—Proportional;
- I—Integral;
- D—Derivative.
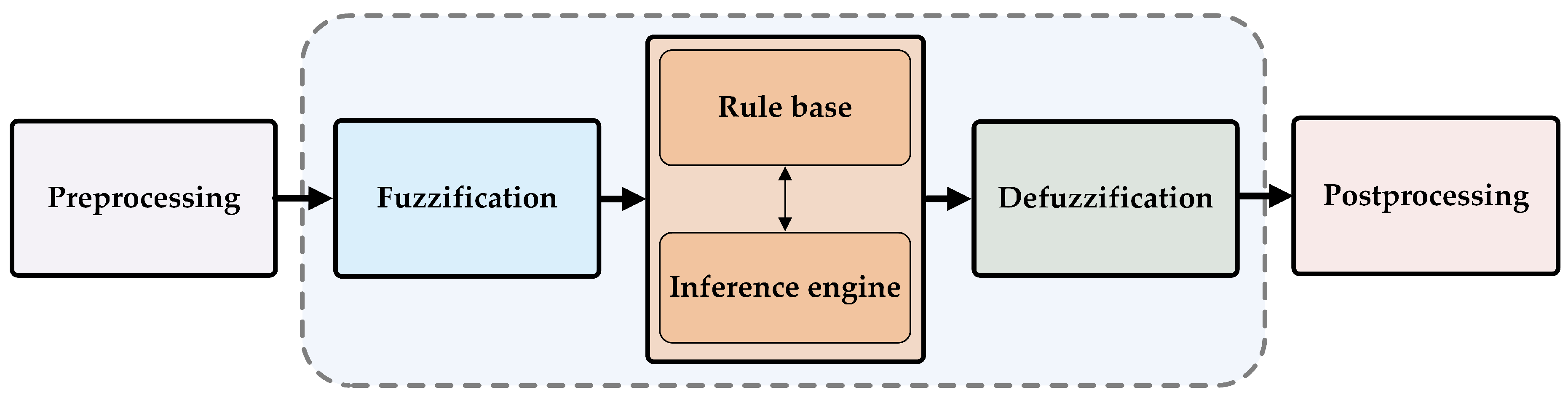
3. Fuzzy Logic—Preliminaries
- Intuitive;
- Well-suited to human input;
- A more interpretable rule base;
- Have widespread acceptance;
4. Empirical Study Case
- Too far—trap (−2000, −2000, −1000, 0);
- Zero—tfn (−1000, 0, 1000);
- Close—tfn (0, 1000, 4000);
- Medium—tfn (1000, 4000, 7000);
- Far—trap (4000, 7000, 8000, 8000).
- Negative big—trap(−400, −400, −200, −120);
- Negative medium—tfn(−200, −120, −40);
- Negative small—tfn(−120, −40, 0);
- Zero—tfn(−40, 0, 40);
- Small—tfn(0, 40, 120);
- Medium—tfn(40, 120, 200);
- Big—trap(120, 200, 400, 400).
- Negative very high—trap(−100, −100, −80, −50);
- Negative high—tfn(−80, −50, −20);
- Negative medium—tfn(−50, −20, 0);
- Zero—tfn(−20, 0, 20);
- Medium—tfn(0, 20, 50);
- High—tfn(20, 50, 80);
- Very high —trap(50, 80, 100, 100).
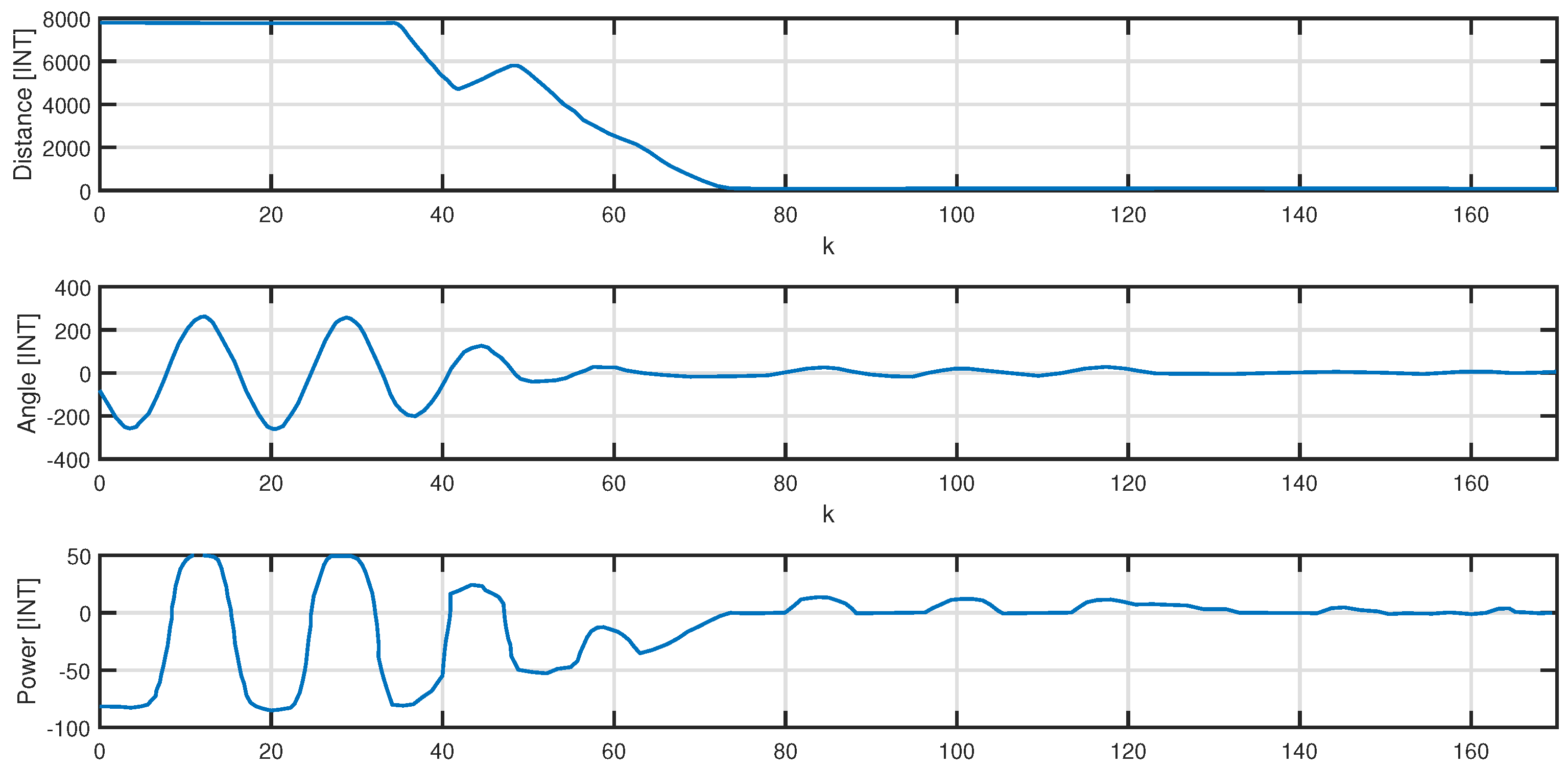
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PID | Proportional-Integral-Derivative |
| SISO | single-input single-outpu |
| MISO | many-inputs single-outpu |
| MIMO | many-inputs many-outpus |
| FIS | fuzzy inference system |
References
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Fractional-order [proportional derivative] controller for robust motion control: Tuning procedure and validation. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1412–1417. [Google Scholar]
- Shinskey, F.G. Process Control Systems: Application, Design, and Tuning; McGraw-Hill: New York, NY, USA, 1996; Volume 4. [Google Scholar]
- Coviello, G.; Avitabile, G.; Florio, A. A synchronized multi-unit wireless platform for long-term activity monitoring. Electronics 2020, 9, 1118. [Google Scholar] [CrossRef]
- Kołodziejczyk, J.; Piegat, A.; Sałabun, W. Which Alternative for Solving Dual Fuzzy Nonlinear Equations Is More Precise? Mathematics 2020, 8, 1507. [Google Scholar] [CrossRef]
- Shekhovtsov, A.; Kołodziejczyk, J. Do distance-based multi-criteria decision analysis methods create similar rankings? Procedia Comput. Sci. 2020, 176, 3718–3729. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Derivation of fuzzy control rules from human operator’s control actions. IFAC Proc. Vol. 1983, 16, 55–60. [Google Scholar] [CrossRef]
- Favilla, J.; Machion, A.; Gomide, F. Fuzzy traffic control: Adaptive strategies. In Proceedings of the [Proceedings 1993] Second IEEE International Conference on Fuzzy Systems, San Francisco, CA, USA, 28 March–1 April 1993; pp. 506–511. [Google Scholar]
- Kiguchi, K.; Tanaka, T.; Fukuda, T. Neuro-fuzzy control of a robotic exoskeleton with EMG signals. IEEE Trans. Fuzzy Syst. 2004, 12, 481–490. [Google Scholar] [CrossRef]
- Shekhovtsov, A.; Kołodziejczyk, J.; Sałabun, W. Fuzzy Model Identification Using Monolithic and Structured Approaches in Decision Problems with Partially Incomplete Data. Symmetry 2020, 12, 1541. [Google Scholar] [CrossRef]
- Sałabun, W.; Wątróbski, J.; Shekhovtsov, A. Are MCDA Methods Benchmarkable? A Comparative Study of TOPSIS, VIKOR, COPRAS, and PROMETHEE II Methods. Symmetry 2020, 12, 1549. [Google Scholar] [CrossRef]
- Haugen, F. Comparing PI Tuning Methods in a Real Benchmark Temperature Control System. Model. Identif. Control 2010, 31, 79–91. [Google Scholar] [CrossRef]
- Yu, K.W.; Hsu, J.H. Fuzzy gain scheduling PID control design based on particle swarm optimization method. In Proceedings of the Second International Conference on Innovative Computing, Informatio and Control (ICICIC 2007), Kumamoto, Japan, 5–7 September 2007; p. 337. [Google Scholar]
- Copeland, R.P.; Rattan, K.S. A fuzzy logic supervisor for PID control of unknown systems. In Proceedings of the 1994 9th IEEE International Symposium on Intelligent Control, Columbus, OH, USA, 16–18 August 1994; pp. 22–26. [Google Scholar]
- Lemke, H.V.N.; De-Zhao, W. Fuzzy PID supervisor. In Proceedings of the 1985 24th IEEE Conference on Decision and Control, Fort Lauderdale, FL, USA, 11–13 December 1985; pp. 602–608. [Google Scholar]
- Więckowski, J.; Kizielewicz, B.; Kołodziejczyk, J. The Search of the Optimal Preference Values of the Characteristic Objects by Using Particle Swarm Optimization in the Uncertain Environment. In Proceedings of the International Conference on Intelligent Decision Technologies, Split, Croatia, 17–19 June 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 353–363. [Google Scholar]
- Więckowski, J.; Kizielewicz, B.; Kołodziejczyk, J. Finding an Approximate Global Optimum of Characteristic Objects Preferences by Using Simulated Annealing. In Proceedings of the International Conference on Intelligent Decision Technologies, Split, Croatia, 17–19 June 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 365–375. [Google Scholar]
- Kizielewicz, B.; Sałabun, W. A New Approach to Identifying a Multi-Criteria Decision Model Based on Stochastic Optimization Techniques. Symmetry 2020, 12, 1551. [Google Scholar] [CrossRef]
- Piccinni, G.; Talarico, C.; Avitabile, G.; Coviello, G. Innovative Strategy for Mixer Design Optimization Based on gm/ID Methodology. Electronics 2019, 8, 954. [Google Scholar] [CrossRef] [Green Version]
- Naranjo, J.E.; Serradilla, F.; Nashashibi, F. Speed Control Optimization for Autonomous Vehicles with Metaheuristics. Electronics 2020, 9, 551. [Google Scholar] [CrossRef] [Green Version]
- Hoang, U.T.T.; Le, H.X.; Thai, N.H.; Pham, H.V.; Nguyen, L. Consistency of Control Performance in 3D Overhead Cranes under Payload Mass Uncertainty. Electronics 2020, 9, 657. [Google Scholar] [CrossRef] [Green Version]
- Chopra, S.; Mitra, R.; Kumar, V. Fuzzy controller: Choosing an appropriate and smallest rule set. Int. J. Comput. Cogn. 2005, 3, 73–78. [Google Scholar]
- Zhou, Y.S.; Lai, L.Y. Optimal design for fuzzy controllers by genetic algorithms. IEEE Trans. Ind. Appl. 2000, 36, 93–97. [Google Scholar] [CrossRef]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer Science & Business Media: Cham, Switzerland, 2013. [Google Scholar]
- Tong, R. A control engineering review of fuzzy systems. Automatica 1977, 13, 559–569. [Google Scholar] [CrossRef]
- Rahman, S.M.; Ratrout, N.T. Review of the fuzzy logic based approach in traffic signal control: Prospects in Saudi Arabia. J. Transp. Syst. Eng. Inf. Technol. 2009, 9, 58–70. [Google Scholar] [CrossRef]
- Sabegh, M.H.Z.; Mirzazadeh, A.; Salehian, S.; Weber, G.W. A literature review on the fuzzy control chart; classifications & analysis. Int. J. Supply Oper. Manag. 2014, 1, 167–189. [Google Scholar]
- Willis, M. Proportional-Integral-Derivative Control; Dept. of Chemical and Process Engineering University of Newcastle: Newcastle, UK, 1999. [Google Scholar]
- Mattei, M. Robust multivariable PID control for linear parameter varying systems. Automatica 2001, 37, 1997–2003. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A.; Sanjay, H. Feedback Control of Dynamic Systems; Pearson: London, UK, 2015. [Google Scholar]
- Thanh, T.D.C.; Ahn, K.K. Nonlinear PID control to improve the control performance of 2 axes pneumatic artificial muscle manipulator using neural network. Mechatronics 2006, 16, 577–587. [Google Scholar] [CrossRef]
- Li, S.J.; Liu, Y.X. An improved approach to nonlinear dynamical system identification using PID neural networks. Int. J. Nonlinear Sci. Numer. Simul. 2006, 7, 177–182. [Google Scholar] [CrossRef]
- Chen, J.; Huang, T.C. Applying neural networks to on-line updated PID controllers for nonlinear process control. J. Process Control 2004, 14, 211–230. [Google Scholar] [CrossRef]
- Kim, T.H.; Maruta, I.; Sugie, T. Robust PID controller tuning based on the constrained particle swarm optimization. Automatica 2008, 44, 1104–1110. [Google Scholar] [CrossRef]
- Thomas, N.; Poongodi, D.P. Position control of DC motor using genetic algorithm based PID controller. In Proceedings of the world Congress on Engineering, London, UK, 1–3 July 2009; Volume 2, pp. 1–3. [Google Scholar]
- Qiao, W.Z.; Mizumoto, M. PID type fuzzy controller and parameters adaptive method. Fuzzy Sets Syst. 1996, 78, 23–35. [Google Scholar] [CrossRef]
- Mann, G.K.; Hu, B.G.; Gosine, R.G. Analysis of direct action fuzzy PID controller structures. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1999, 29, 371–388. [Google Scholar] [CrossRef] [PubMed]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]
- Li, H.X.; Zhang, L.; Cai, K.Y.; Chen, G. An improved robust fuzzy-PID controller with optimal fuzzy reasoning. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2005, 35, 1283–1294. [Google Scholar] [CrossRef] [Green Version]
- Reznik, L.; Ghanayem, O.; Bourmistrov, A. PID plus fuzzy controller structures as a design base for industrial applications. Eng. Appl. Artif. Intell. 2000, 13, 419–430. [Google Scholar] [CrossRef]
- Güzelkaya, M.; Eksin, I.; Yeşil, E. Self-tuning of PID-type fuzzy logic controller coefficients via relative rate observer. Eng. Appl. Artif. Intell. 2003, 16, 227–236. [Google Scholar] [CrossRef]
- Karasakal, O.; Guzelkaya, M.; Eksin, I.; Yesil, E.; Kumbasar, T. Online tuning of fuzzy PID controllers via rule weighing based on normalized acceleration. Eng. Appl. Artif. Intell. 2013, 26, 184–197. [Google Scholar] [CrossRef]
- Mallesham, G.; Rajani, A. Automatic tuning of PID controller using fuzzy logic. In Proceedings of the 8th International Conference on Development and Application Systems, Suceava, Romania, 25–27 May 2006; pp. 120–127. [Google Scholar]
- Visioli, A. Tuning of PID controllers with fuzzy logic. IEE Proc.-Control Theory Appl. 2001, 148, 1–8. [Google Scholar] [CrossRef]
- Pan, I.; Das, S.; Gupta, A. Tuning of an optimal fuzzy PID controller with stochastic algorithms for networked control systems with random time delay. ISA Trans. 2011, 50, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Pivonka, P. Comparative analysis of fuzzy PI/PD/PID controller based on classical PID controller approach. In Proceedings of the 2002 IEEE World Congress on Computational Intelligence. 2002 IEEE International Conference on Fuzzy Systems. FUZZ-IEEE’02. Proceedings (Cat. No. 02CH37291), Honolulu, HI, USA, 12–17 May 2002; Volume 1, pp. 541–546. [Google Scholar]
- Santos, M.; Dormido, S.; De La Cruz, J. Fuzzy-PID controllers vs. fuzzy-PI controllers. In Proceedings of the IEEE 5th International Fuzzy Systems, New Orleans, LA, USA, 11 September 1996; Volume 3, pp. 1598–1604. [Google Scholar]
- Huang, S.J.; Lin, C.C. A self-organising fuzzy logic controller for a coordinate machine. Int. J. Adv. Manuf. Technol. 2002, 19, 736–742. [Google Scholar] [CrossRef]
- Pelusi, D. Optimization of a fuzzy logic controller using genetic algorithms. In Proceedings of the 2011 Third International Conference on Intelligent Human-Machine Systems and Cybernetics, Zhejiang, China, 26–27 August 2011; Volume 2, pp. 143–146. [Google Scholar]
- Liu, C.; Zhao, J.; Gu, J.; Du, Y.; Li, Z.; Zhu, Z.; Mao, E. Pressure Control Algorithm Based on Adaptive Fuzzy PID with Compensation Correction for the Tractor Electronic Hydraulic Hitch. Appl. Sci. 2020, 10, 3179. [Google Scholar] [CrossRef]
- Piegat, A.; Jaszczak, S.; Pluciński, M. Selflearning neuro-fuzzy PID controller without simplifications. In Proceedings of the International Symposium on Methods and Models in Automation and Robotics MMAR’96, Miedzyzdroje, Poland, 10–13 September 1996; Volume 3, pp. 1195–1200. [Google Scholar]
- Mardani, M.M.; Vafamand, N.; Khooban, M.H.; Dragičević, T.; Blaabjerg, F. Design of quadratic D-stable fuzzy controller for DC microgrids with multiple CPLs. IEEE Trans. Ind. Electron. 2018, 66, 4805–4812. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, R.P.; Martiniano, A.; Ferreira, A.; Romero, M.; Sassi, R.J. Container crane controller with the use of a NeuroFuzzy Network. In Proceedings of the IFIP International Conference on Advances in Production Management Systems, Iguassu Falls, Brazil, 3–7 September 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 122–129. [Google Scholar]
- Ngo, Q.H.; Nguyen, N.P.; Nguyen, C.N.; Tran, T.H.; Ha, Q.P. Fuzzy sliding mode control of an offshore container crane. Ocean Eng. 2017, 140, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Åström, K.J.; Hägglund, T. The future of PID control. Control Eng. Pract. 2001, 9, 1163–1175. [Google Scholar] [CrossRef]
- Erickson, K.T. Programmable Logic Controllers: An Emphasis on Design and Application; Dogwood Valley Press, LLC: Rolla, MO, USA, 2016. [Google Scholar]
- Smith, C.L. Practical Process Control: Tuning and Troubleshooting; John Wiley & Sons: New York, NY, USA, 2009. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Wątróbski, J.; Jankowski, J.; Ziemba, P.; Karczmarczyk, A.; Zioło, M. Generalised framework for multi-criteria method selection. Omega 2019, 86, 107–124. [Google Scholar] [CrossRef]
- Sałabun, W.; Piegat, A. Comparative analysis of MCDM methods for the assessment of mortality in patients with acute coronary syndrome. Artif. Intell. Rev. 2017, 48, 557–571. [Google Scholar] [CrossRef]
- Faizi, S.; Rashid, T.; Sałabun, W.; Zafar, S.; Wątróbski, J. Decision making with uncertainty using hesitant fuzzy sets. Int. J. Fuzzy Syst. 2018, 20, 93–103. [Google Scholar] [CrossRef] [Green Version]
- Bashir, Z.; Rashid, T.; Wątróbski, J.; Sałabun, W.; Malik, A. Hesitant probabilistic multiplicative preference relations in group decision making. Appl. Sci. 2018, 8, 398. [Google Scholar] [CrossRef] [Green Version]
- Faizi, S.; Sałabun, W.; Ullah, S.; Rashid, T.; Więckowski, J. A New Method to Support Decision-Making in an Uncertain Environment Based on Normalized Interval-Valued Triangular Fuzzy Numbers and COMET Technique. Symmetry 2020, 12, 516. [Google Scholar] [CrossRef] [Green Version]
- Deschrijver, G.; Kerre, E.E. On the relationship between some extensions of fuzzy set theory. Fuzzy Sets Syst. 2003, 133, 227–235. [Google Scholar] [CrossRef]
- Sałabun, W.; Karczmarczyk, A.; Wątróbski, J. Decision-making using the hesitant fuzzy sets COMET method: An empirical study of the electric city buses selection. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018; pp. 1485–1492. [Google Scholar]
- Zimmermann, H.J. Fuzzy Set Theory—And Its Applications; Springer Science & Business Media: Cham, Switzerland, 2011. [Google Scholar]
- Piegat, A. Fuzzy Modeling and Control; Springer Science & Business Media: Cham, Switzerland, 2013; Volume 69. [Google Scholar]
- Gaxiola, F.; Melin, P.; Valdez, F.; Castillo, O.; Castro, J.R. Comparison of T-norms and S-norms for interval type-2 fuzzy numbers in weight adjustment for neural networks. Information 2017, 8, 114. [Google Scholar] [CrossRef] [Green Version]
- Rustum, R.; Kurichiyanil, A.M.J.; Forrest, S.; Sommariva, C.; Adeloye, A.J.; Zounemat-Kermani, M.; Scholz, M. Sustainability Ranking of Desalination Plants Using Mamdani Fuzzy Logic Inference Systems. Sustainability 2020, 12, 631. [Google Scholar] [CrossRef] [Green Version]
- Fayaz, M.; Ullah, I.; Kim, D. An optimized fuzzy logic control model based on a strategy for the learning of membership functions in an indoor environment. Electronics 2019, 8, 132. [Google Scholar] [CrossRef] [Green Version]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sałabun, W.; Więckowski, J.; Shekhovtsov, A.; Palczewski, K.; Jaszczak, S.; Wątróbski, J. How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers. Electronics 2020, 9, 2017. https://doi.org/10.3390/electronics9122017
Sałabun W, Więckowski J, Shekhovtsov A, Palczewski K, Jaszczak S, Wątróbski J. How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers. Electronics. 2020; 9(12):2017. https://doi.org/10.3390/electronics9122017
Chicago/Turabian StyleSałabun, Wojciech, Jakub Więckowski, Andrii Shekhovtsov, Krzysztof Palczewski, Sławomir Jaszczak, and Jarosław Wątróbski. 2020. "How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers" Electronics 9, no. 12: 2017. https://doi.org/10.3390/electronics9122017
APA StyleSałabun, W., Więckowski, J., Shekhovtsov, A., Palczewski, K., Jaszczak, S., & Wątróbski, J. (2020). How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers. Electronics, 9(12), 2017. https://doi.org/10.3390/electronics9122017