Median Filtering Using First-Order and Second-Order Neighborhood Pixels to Reduce Fixed Value Impulse Noise from Grayscale Digital Images



Abstract
:1. Introduction
2. Related Works
3. The Proposed Method
3.1. Noise Detection Stage
- Step 1:
- Initialize all pixels as noise-free pixels by making all elements in matrix N equal to 0.
- Step 2:
- Denote all pixels having extreme intensity value as noise candidate pixel PNC.where (x,y) are the spatial coordinates, and C(x,y) is the intensity value of the corrupted image at coordinates (x,y). PNC(x,y) equal to 1 is used to indicate that the pixel is a noise candidate pixel, whereas PNC(x,y) equal to 0 is used to indicate that the pixel is noise-free.
- Step 3:
- For each PNC(x,y) equal to 1, compute the intensity difference values between this pixel with each of its neighboring pixels within a 3 × 3 window, with coordinates (x,y) at the center of that window. These difference values are stored in vector D.with vector a = {−1,0,1,1,1,0,−1,−1} and vector b = {−1,−1,−1,0,1,1,1,0}.
- Step 4:
- If all the neighboring pixels have the same intensity with the center pixel, which is , go to Step 6. Otherwise, compare all values in D with HDV value. If any value in D is bigger than HDV, the pixel at these coordinates is denoted as a noisy pixel. Thus, N(x,y) is given the value 1 and go to Step 8. Otherwise, go to Step 5.
- Step 5:
- Replace any element in D which is equal to 255 with HDV value. Then, compute the mean value of the elements in the updated D. If the mean value is greater than HMV, PNC is denoted as a noisy pixel (i.e., N(x,y) = 1), otherwise as a noise-free pixel (i.e, N(x,y) = 0), then go to Step 8.
- Step 6:
- Count the number of pixels that have the same intensity as PNC(x,y) within a window of size 5 × 5 pixels, with coordinates (x,y) at the center of the window. Save this count as Cs.
- Step 7:
- If Cs > 21, PNC is denoted as a noise-free pixel (i.e., N(x,y) = 0), otherwise as a noisy pixel (i.e., N(x,y) = 1), then go to Step 8.
- Step 8:
- Repeat the steps from Step 3 to Step 8 for all PNC.
3.2. Image Denoising Stage
- Step 1:
- Locate the noisy pixel PN (i.e., the pixel with N(x,y) = 1).
- Step 2:
- Check the pixels surrounding PN in a window of size 3 × 3 with PN at the center of the window. If all pixels in the window have extreme intensities go to Step 4. Otherwise, go to Step 3.
- Step 3:
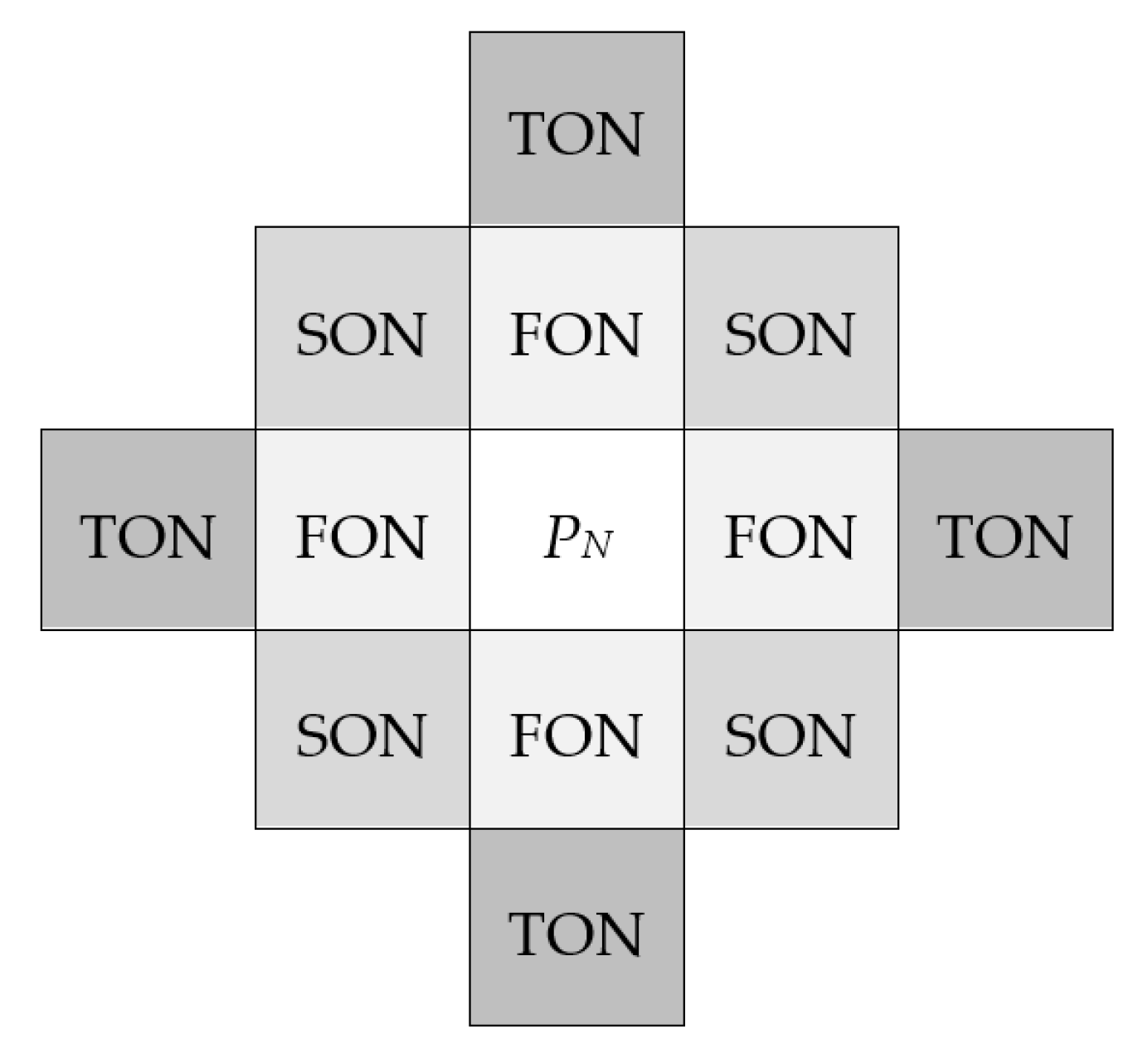
- If all FON pixels have extreme intensities, the median value of SON pixels will be the new intensity value of PN. Otherwise, the median value of FON will be the new value of PN. Then go to Step 6.
- Step 4:
- Count the number of the pixels having the opposite extreme intensity of PN, which is Co. Then go to Step 5.
- Step 5:
- If Co greater than 6, the new value of PN will be the opposite extreme value of it. Otherwise, leave it with no change. Then move to Step 6.
- Step 6:
- Repeat all steps for all noisy pixels in the image (i.e., the pixels with N(x,y) = 1).
4. Results and Discussions
4.1. Data Preparation
4.2. Calculations to Determine HDV and HMV
4.3. Noise Detection Stage Evaluation
4.4. Image Denoising Stage Evaluation
4.5. State-of-Art Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dubey, A.K.; Arora, R.; Yadav, S. A review and comprehensive comparison of image de-noising techniques. In Proceedings of the 2017 6th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 20–22 September 2017; pp. 624–629. [Google Scholar]
- Khan, S.; Lee, D. An adaptive dynamically weighted median filter for impulse noise removal. EURASIP J. Adv. Signal Process. 2017, 2017, 67. [Google Scholar] [CrossRef] [Green Version]
- Jian-Hong, X.; Ye, P.; Wang, L.; He, M. A novel image-restoration method based on high-order total variation regularization term. Electronics 2019, 8, 867. [Google Scholar]
- Omer, A.A.; Hassan, O.I.; Ahmed, A.I.; Abdelrahman, A. Denoising CT Images using Median based Filters: A Review. In Proceedings of the 2018 International Conference on Computer, Control, Electrical, and Electronics Engineering (ICCCEEE), Khartoum, Sudan, 12–14 August 2018; pp. 1–6. [Google Scholar]
- George, G.; Oommen, R.M.; Shelly, S.; Philipose, S.S.; Varghese, A.M. A Survey on Various Median Filtering Techniques for Removal of Impulse Noise from Digital Image. In Proceedings of the 2018 Conference on Emerging Devices and Smart Systems (ICEDSS), Tiruchengode, India, 2–3 March 2018; pp. 235–238. [Google Scholar]
- Boo, S.T.; Ibrahim, H.; Toh, K.K.V. An Improved Progressive Switching Median Filter. In Proceedings of the 2009 International Conference on Future Computer and Communication, Kuala Lumpar, Malaysia, 3–5 April 2009; pp. 136–139. [Google Scholar]
- Sheikh, S.; Suthar, B.; Uddin, M. Comparative study of noise and digital filters for image processing. In Proceedings of the 2017 International Conference on Innovations in Control, Communication and Information Systems (ICICCI), Greater Noida, India, 12–13 August 2017; pp. 1–6. [Google Scholar]
- Konieczka, A.; Balcerek, J.; Dąbrowski, A. Method of adaptive pixel averaging for impulse noise reduction in digital images. In Proceedings of the 2018 Baltic URSI Symposium (URSI), Poznan, Poland, 14–17 May 2018; pp. 221–224. [Google Scholar]
- Kumain, S.C.; Singh, M.; Singh, N.; Kumar, K. An efficient Gaussian Noise Reduction Technique for Noisy Images using optimized filter approach. In Proceedings of the 2018 First International Conference on Secure Cyber Computing and Communication (ICSCCC), Jalandhar, India, 15–17 December 2018; pp. 243–248. [Google Scholar]
- Das, J.; Das, B.; Saikia, J.; Nirmala, S. Removal of salt and pepper noise using selective adaptive median filter. In Proceedings of the 2016 International Conference on Accessibility to Digital World (ICADW), Guwahati, India, 16–18 December 2016; pp. 203–206. [Google Scholar]
- Sravani, B.; Rao, M.V.N. Removing of high density salt and pepper noise using fuzzy median filter. In Proceedings of the 2014 International Conference on High Performance Computing and Applications (ICHPCA), Bhubaneswar, India, 22–24 December 2014; pp. 1–6. [Google Scholar]
- Sangave, P.H.; Jain, G. Impulse noise detection and removal by modified boundary discriminative noise detection technique. In Proceedings of the 2017 International Conference on Intelligent Sustainable Systems (ICISS), Palladam, India, 7–8 December 2017; pp. 715–719. [Google Scholar]
- Kiani, V.; Zohrevand, A. A Fuzzy Directional Median Filter for Fixed-value Impulse Noise Removal. In Proceedings of the 2019 7th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Bojnord, Iran, 29–31 January 2019; pp. 1–4. [Google Scholar]
- Jin, K.H.; Ye, J.C. Sparse and Low-Rank Decomposition of a Hankel Structured Matrix for Impulse Noise Removal. IEEE Trans. Image Process. 2018, 27, 1448–1461. [Google Scholar] [CrossRef] [PubMed]
- Yun, J.H.; Lim, H.J. Image Restoration Using Fixed-Point-Like Methods for New TVL1 Variational Problems. Electronics 2020, 9, 735. [Google Scholar] [CrossRef]
- Patanavijit, V.; Thakulsukanant, K. The Novel Denoising Technique Based on 8D Optimal Directions Using Statistical SD for Random-Valued Impulse Noise. In Proceedings of the 2018 IEEE 7th Global Conference on Consumer Electronics (GCCE), Nara, Japan, 9–12 October 2018; pp. 34–37. [Google Scholar]
- Ibrahim, H.; Abdalameer, A.K. Improvement of quantized adaptive switching median filter for impulse noise reduction in gray-scale digital images. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 580–594. [Google Scholar] [CrossRef]
- Roy, A.; Manam, L.; Laskar, R.H. Region Adaptive Fuzzy Filter: An Approach for Removal of Random-Valued Impulse Noise. IEEE Trans. Ind. Electron. 2018, 65, 7268–7278. [Google Scholar] [CrossRef]
- Zhu, H.; Ng, M.K. Structured Dictionary Learning for Image Denoising Under Mixed Gaussian and Impulse Noise. IEEE Trans. Image Process. 2020, 29, 6680–6693. [Google Scholar] [CrossRef]
- Mafi, M.; Izquierdo, W.; Adjouadi, M. High Impulse Noise Intensity Removal in Natural Images Using Convolutional Neural Network. In Proceedings of the 2020 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 673–677. [Google Scholar]
- Taha, A.Q.M.; Ibrahim, H. Reduction of Salt-and-Pepper Noise from Digital Grayscale Image by Using Recursive Switching Adaptive Median Filter. In Intelligent Manufacturing and Mechatronics. SympoSIMM 2019. Lecture Notes in Mechanical Engineering; Jamaludin, Z., Ali Mokhtar, M., Eds.; Springer: Singapore, 2020; pp. 32–47. [Google Scholar]
- Chen, J.; Zhan, Y.; Cao, H. Adaptive Sequentially Weighted Median Filter for Image Highly Corrupted by Impulse Noise. IEEE Access 2019, 7, 158545–158556. [Google Scholar] [CrossRef]
- Suganthi, A.; Senthilmurugan, M. Comparative Study of Various Impulse Noise Reduction Techniques. Int. J. Eng. Res. Appl. 2013, 3, 1302–1306. [Google Scholar]
- Caliskan, A.; Çil, Z.A.; Badem, H.; Karaboga, D. Regression-Based Neuro-Fuzzy Network Trained by ABC Algorithm for High-Density Impulse Noise Elimination. IEEE Trans. Fuzzy Syst. 2020, 28, 1084–1095. [Google Scholar] [CrossRef]
- Kuwahara, M.; Hachimura, K.; Eiho, S.; Kinoshita, M. Processing of RI-Angiocardiographic Images. In Digital Processing of Biomedical Images; Preston, K., Jr., Onoe, M., Eds.; Plenum: New York, NY, USA, 1976; pp. 187–202. [Google Scholar]
- Bartyzel, K. Adaptive Kuwahara filter. Signal Image Video Process. 2016, 10, 663–670. [Google Scholar] [CrossRef] [Green Version]
- Van den Boomgaard, R. Decomposition of the Kuwahara-Nagao Operator in terms of Linear Smoothing and Morphological Sharpening. IEEE Trans. Knowl. Data Eng. 2002, 2, 283–291. [Google Scholar]
- Nagao, M.; Matsuyama, T. Edge preserving smoothing. Comput. Graph. Image Process. 1979, 9, 394–407. [Google Scholar] [CrossRef]
- Papari, G.; Petkov, N.; Campisi, P. Artistic edge and corner enhancing smoothing. IEEE Trans. Image Process. 2007, 16, 2449–2462. [Google Scholar] [CrossRef] [Green Version]
- Sadhukhan, T.; Chatterjee, S.; Das, R.K.; Ghosh, S.; Das, D.; Sanyal, J. Efficient Removal of Noise from an Image using HSV Filtering. In Proceedings of the 2019 Global Conference for Advancement in Technology (GCAT), Bangaluru, India, 18–20 October 2019; pp. 1–4. [Google Scholar]
- Teoh, S.H.; Ibrahim, H. Robust algorithm for broad impulse noise removal utilizing intensity distance and intensity height methodologies. Signal Image Video Process. 2014, 8, 223–242. [Google Scholar] [CrossRef]
- Wang, G.; Li, D.; Pan, W.; Zang, Z. Modified switching median filter for impulse noise removal. Signal Process. 2010, 90, 3213–3218. [Google Scholar] [CrossRef]
- Tripathi, A.; Ghanekar, U.; Mukhopadhyay, S. Switching median filter: Advanced boundary discriminative noise detection algorithm. IET Image Process. 2011, 5, 598–600. [Google Scholar] [CrossRef]
- Samantaray, A.K.; Kanungo, P.; Mohanty, B. Neighbourhood decision based impulse noise filter. IET Image Process. 2018, 12, 1222–1227. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, Y.; Cao, H.; Xiong, G. Iterative grouping median filter for removal of fixed value impulse noise. IET Image Process. 2019, 13, 946–953. [Google Scholar] [CrossRef]
- Zhou, M.; Chen, H.; Paisley, J.; Ren, L.; Li, L.; Xing, Z.; Dunson, D.; Sapiro, G.; Carin, L. Nonparametric Bayesian Dictionary Learning for Analysis of Noisy and Incomplete Images. IEEE Trans. Image Process. 2012, 21, 130–144. [Google Scholar] [CrossRef] [PubMed]
- Kwan, C.; Zhou, J.; Ayhan, B.; Tran, T. ATR performance improvement using images with corrupted or missing pixels. In Proceedings of the Pattern Recognition and Tracking XXIX, Orlando, FL, USA, 18–19 April 2018; Volume 10649, p. 106490E. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Difference Values | 0 | 1–10 | 11–20 | 21–30 | 31–40 | 41–50 | 51–100 | 101–150 | 151–200 | 201–255 |
|---|---|---|---|---|---|---|---|---|---|---|
| Repetition rate | 58.0% | 14.7% | 5.7% | 5.9% | 3.7% | 2.5% | 6.2% | 2.2% | 0.9% | 0.3% |
| Mean Value of the Differences | <1 | <2 | <3 | <4 | <5 | <6 | <7 | <8 |
|---|---|---|---|---|---|---|---|---|
| The ratio | 83.4% | 91.9% | 95.5% | 96.9% | 98.1% | 99.3% | 99.9% | 100% |
| ND | VTD [33] | FTD [34] | BDND [12] | D3PLS [22] | Proposed | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| MDR | FDR | MDR | FDR | MDR | FDR | MDR | FDR | MDR | FDR | |
| 5 | 0.00 | 3.69 | 0.00 | 3.67 | 0.00 | 3.80 | 0.39 | 3.23 | 0.13 | 2.65 |
| 10 | 0.00 | 1.84 | 0.00 | 1.81 | 0.00 | 1.89 | 0.41 | 1.57 | 0.13 | 1.30 |
| 15 | 0.00 | 1.23 | 0.00 | 1.19 | 0.00 | 1.21 | 0.40 | 1.01 | 0.13 | 0.85 |
| 20 | 0.00 | 0.81 | 0.00 | 0.88 | 0.00 | 0.88 | 0.39 | 0.75 | 0.13 | 0.63 |
| 25 | 0.00 | 0.63 | 0.00 | 0.69 | 0.00 | 0.69 | 0.40 | 0.58 | 0.14 | 0.50 |
| 30 | 0.00 | 0.53 | 0.00 | 0.57 | 0.00 | 0.56 | 0.39 | 0.47 | 0.14 | 0.42 |
| 35 | 0.01 | 0.44 | 0.00 | 0.48 | 0.00 | 0.46 | 0.39 | 0.39 | 0.14 | 0.36 |
| 40 | 0.14 | 0.31 | 0.00 | 0.41 | 0.00 | 0.39 | 0.39 | 0.33 | 0.15 | 0.31 |
| 45 | 0.27 | 0.28 | 0.00 | 0.36 | 0.00 | 0.34 | 0.39 | 0.28 | 0.16 | 0.27 |
| 50 | 0.47 | 0.25 | 0.00 | 0.32 | 0.00 | 0.29 | 0.39 | 0.25 | 0.16 | 0.24 |
| 55 | 2.41 | 0.16 | 0.00 | 0.28 | 0.00 | 0.26 | 0.39 | 0.22 | 0.17 | 0.22 |
| 60 | 5.91 | 0.14 | 0.00 | 0.25 | 0.00 | 0.23 | 0.39 | 0.19 | 0.17 | 0.19 |
| 65 | 8.15 | 0.13 | 0.00 | 0.23 | 0.00 | 0.20 | 0.38 | 0.17 | 0.18 | 0.17 |
| 70 | 10.74 | 0.11 | 0.00 | 0.20 | 0.00 | 0.18 | 0.37 | 0.15 | 0.18 | 0.16 |
| 75 | 35.03 | 0.06 | 0.00 | 0.18 | 0.00 | 0.16 | 0.37 | 0.14 | 0.19 | 0.15 |
| 80 | 40.76 | 0.06 | 0.00 | 0.16 | 0.01 | 0.14 | 0.45 | 0.12 | 0.19 | 0.14 |
| 85 | 46.55 | 0.05 | 0.00 | 0.15 | 0.15 | 0.13 | 1.24 | 0.10 | 0.18 | 0.13 |
| 90 | 52.45 | 0.05 | 0.02 | 0.13 | 2.36 | 0.11 | 6.50 | 0.08 | 0.16 | 0.12 |
| AVG | 11.30 | 0.60 | 0.00 | 0.67 | 0.14 | 0.66 | 0.78 | 0.56 | 0.16 | 0.49 |
| AVG MDR + FDR | 11.87 | 0.67 | 0.81 | 1.34 | 0.65 | |||||
| ND | IGMF [34] | EDF [12] | ASWMF [22] | NBMF [33] | Proposed | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| 5 | 39.67 | 0.990 | 34.86 | 0.954 | 42.90 | 0.993 | 43.41 | 0.994 | 43.76 | 0.994 |
| 10 | 37.02 | 0.980 | 30.21 | 0.854 | 39.96 | 0.987 | 40.43 | 0.988 | 40.66 | 0.988 |
| 15 | 35.30 | 0.971 | 26.71 | 0.732 | 38.07 | 0.980 | 38.53 | 0.982 | 38.66 | 0.982 |
| 20 | 34.06 | 0.961 | 23.95 | 0.617 | 36.59 | 0.973 | 37.04 | 0.975 | 37.12 | 0.975 |
| 25 | 32.99 | 0.950 | 21.67 | 0.520 | 35.36 | 0.965 | 35.77 | 0.967 | 35.87 | 0.968 |
| 30 | 32.11 | 0.940 | 19.72 | 0.438 | 34.28 | 0.956 | 34.70 | 0.959 | 34.75 | 0.959 |
| 35 | 31.35 | 0.927 | 18.06 | 0.371 | 33.33 | 0.947 | 33.78 | 0.950 | 33.76 | 0.950 |
| 40 | 30.63 | 0.915 | 16.59 | 0.316 | 32.50 | 0.936 | 32.90 | 0.940 | 32.89 | 0.939 |
| 45 | 29.98 | 0.902 | 15.31 | 0.271 | 31.71 | 0.924 | 32.09 | 0.928 | 32.03 | 0.928 |
| 50 | 29.33 | 0.888 | 14.13 | 0.232 | 30.96 | 0.911 | 31.31 | 0.916 | 31.27 | 0.915 |
| 55 | 28.71 | 0.872 | 13.08 | 0.200 | 30.24 | 0.897 | 30.57 | 0.902 | 30.51 | 0.901 |
| 60 | 28.11 | 0.855 | 12.15 | 0.172 | 29.56 | 0.882 | 29.85 | 0.887 | 29.80 | 0.886 |
| 65 | 27.52 | 0.836 | 11.29 | 0.148 | 28.86 | 0.864 | 29.10 | 0.869 | 29.07 | 0.868 |
| 70 | 26.90 | 0.815 | 10.52 | 0.126 | 28.16 | 0.845 | 28.33 | 0.849 | 28.32 | 0.848 |
| 75 | 26.21 | 0.791 | 9.74 | 0.105 | 27.38 | 0.821 | 27.51 | 0.824 | 27.57 | 0.825 |
| 80 | 25.50 | 0.762 | 9.02 | 0.085 | 26.55 | 0.793 | 26.63 | 0.795 | 26.72 | 0.797 |
| 85 | 24.71 | 0.726 | 8.35 | 0.067 | 25.57 | 0.756 | 25.60 | 0.757 | 25.75 | 0.760 |
| 90 | 23.77 | 0.682 | 7.76 | 0.051 | 24.36 | 0.705 | 24.37 | 0.705 | 24.50 | 0.709 |
| AVG | 30.22 | 0.876 | 16.84 | 0.348 | 32.02 | 0.896 | 32.33 | 0.899 | 32.39 | 0.700 |
| ND | IGMF + FTD | EDF + BDND | ASWMF + D3PLS | NBMF + VTD | Proposed | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| 5 | 39.67 | 0.990 | 34.91 | 0.954 | 42.83 | 0.993 | 43.64 | 0.994 | 43.85 | 0.994 |
| 10 | 37.02 | 0.980 | 30.21 | 0.855 | 39.95 | 0.987 | 40.61 | 0.989 | 40.86 | 0.989 |
| 15 | 35.30 | 0.971 | 26.70 | 0.731 | 38.05 | 0.980 | 38.73 | 0.983 | 38.86 | 0.983 |
| 20 | 34.06 | 0.961 | 23.93 | 0.617 | 36.56 | 0.973 | 37.22 | 0.976 | 37.29 | 0.976 |
| 25 | 32.99 | 0.950 | 21.67 | 0.519 | 35.34 | 0.965 | 36.00 | 0.969 | 36.05 | 0.969 |
| 30 | 32.11 | 0.940 | 19.73 | 0.438 | 34.30 | 0.956 | 34.91 | 0.960 | 34.98 | 0.960 |
| 35 | 31.35 | 0.928 | 18.06 | 0.371 | 33.33 | 0.946 | 33.97 | 0.951 | 33.96 | 0.951 |
| 40 | 30.63 | 0.915 | 16.60 | 0.316 | 32.47 | 0.936 | 33.10 | 0.941 | 33.09 | 0.941 |
| 45 | 29.98 | 0.902 | 15.31 | 0.271 | 31.68 | 0.924 | 32.28 | 0.930 | 32.23 | 0.930 |
| 50 | 29.33 | 0.888 | 14.14 | 0.233 | 30.95 | 0.911 | 31.53 | 0.918 | 31.47 | 0.918 |
| 55 | 28.71 | 0.872 | 13.10 | 0.200 | 30.22 | 0.898 | 30.76 | 0.905 | 30.72 | 0.904 |
| 60 | 28.11 | 0.856 | 12.16 | 0.172 | 29.53 | 0.882 | 30.03 | 0.890 | 29.99 | 0.889 |
| 65 | 27.52 | 0.837 | 11.28 | 0.147 | 28.87 | 0.864 | 29.27 | 0.872 | 29.25 | 0.872 |
| 70 | 26.90 | 0.815 | 10.50 | 0.126 | 28.13 | 0.844 | 28.48 | 0.851 | 28.48 | 0.852 |
| 75 | 26.21 | 0.791 | 9.74 | 0.105 | 27.37 | 0.821 | 27.62 | 0.826 | 27.73 | 0.829 |
| 80 | 25.50 | 0.762 | 9.03 | 0.086 | 26.56 | 0.793 | 26.76 | 0.797 | 26.89 | 0.801 |
| 85 | 24.71 | 0.726 | 8.36 | 0.067 | 25.57 | 0.756 | 25.73 | 0.758 | 25.91 | 0.765 |
| 90 | 23.77 | 0.682 | 7.77 | 0.051 | 24.34 | 0.704 | 24.42 | 0.705 | 24.63 | 0.714 |
| AVG | 30.22 | 0.876 | 16.84 | 0.348 | 32.00 | 0.896 | 32.50 | 0.901 | 32.57 | 0.902 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mursal, A.S.N.; Ibrahim, H. Median Filtering Using First-Order and Second-Order Neighborhood Pixels to Reduce Fixed Value Impulse Noise from Grayscale Digital Images. Electronics 2020, 9, 2034. https://doi.org/10.3390/electronics9122034
Mursal ASN, Ibrahim H. Median Filtering Using First-Order and Second-Order Neighborhood Pixels to Reduce Fixed Value Impulse Noise from Grayscale Digital Images. Electronics. 2020; 9(12):2034. https://doi.org/10.3390/electronics9122034
Chicago/Turabian StyleMursal, Ali Salim Nasar, and Haidi Ibrahim. 2020. "Median Filtering Using First-Order and Second-Order Neighborhood Pixels to Reduce Fixed Value Impulse Noise from Grayscale Digital Images" Electronics 9, no. 12: 2034. https://doi.org/10.3390/electronics9122034
APA StyleMursal, A. S. N., & Ibrahim, H. (2020). Median Filtering Using First-Order and Second-Order Neighborhood Pixels to Reduce Fixed Value Impulse Noise from Grayscale Digital Images. Electronics, 9(12), 2034. https://doi.org/10.3390/electronics9122034