Modeling and Stability Analysis of Parallel Inverters in Island Microgrid

Abstract
:1. Introduction
2. Output Impedance Model of Inverter
2.1. Open-Loop Output Impedance Model
2.2. Impedance Model of PQ-Controlled Inverter
2.3. Impedance Model of Droop-Controlled Inverter
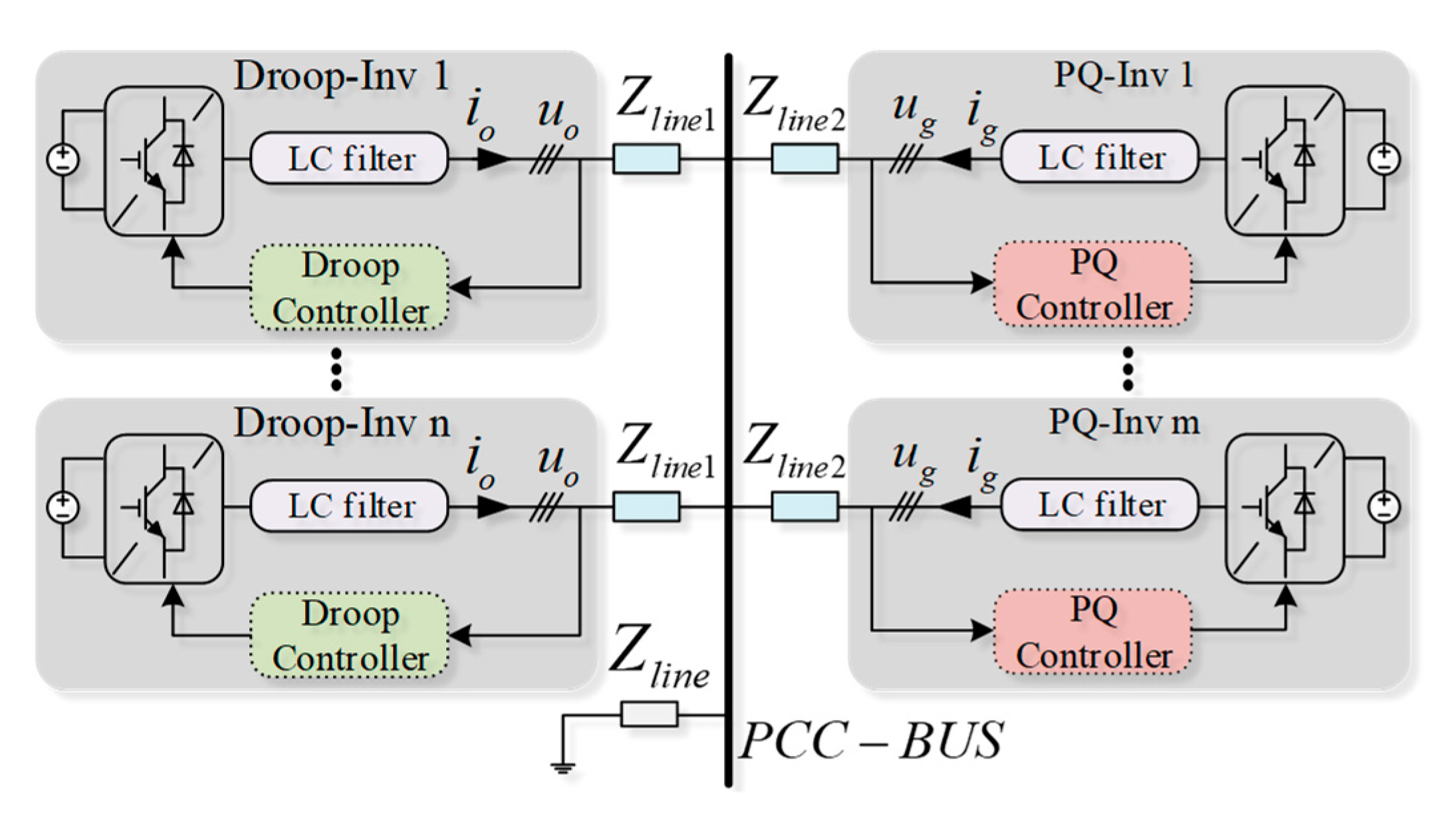
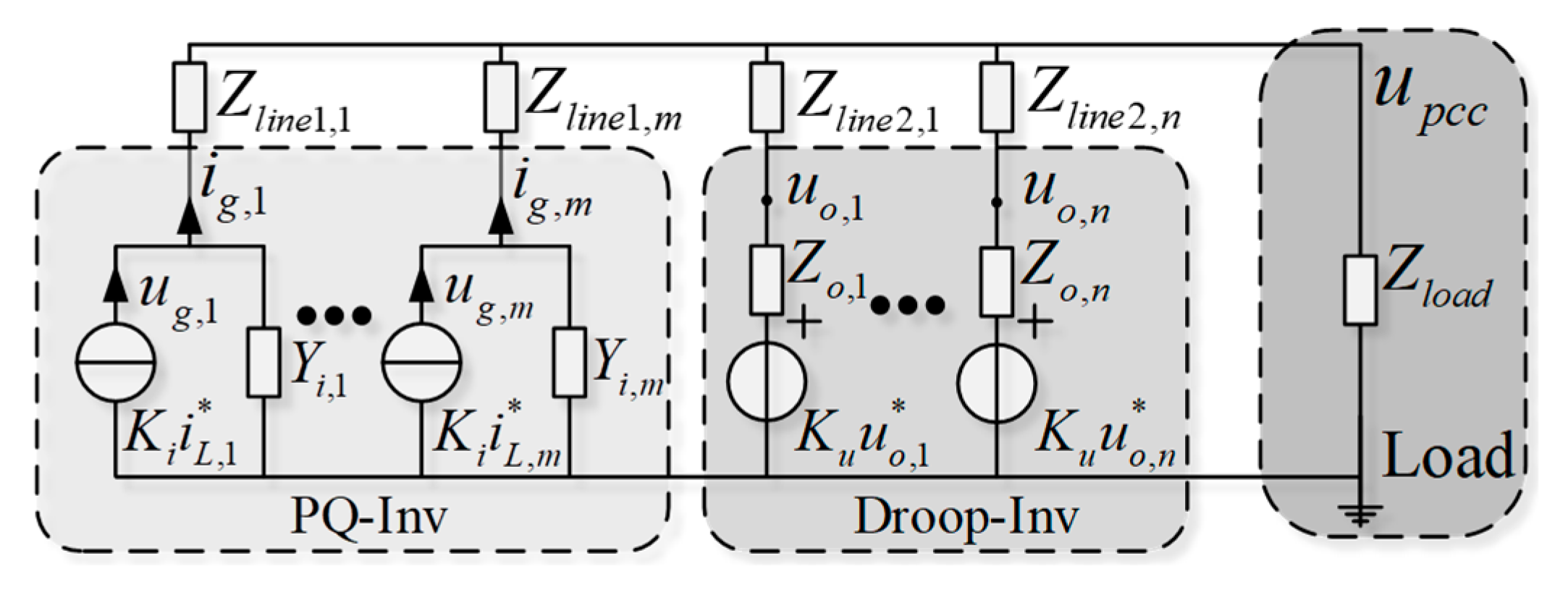
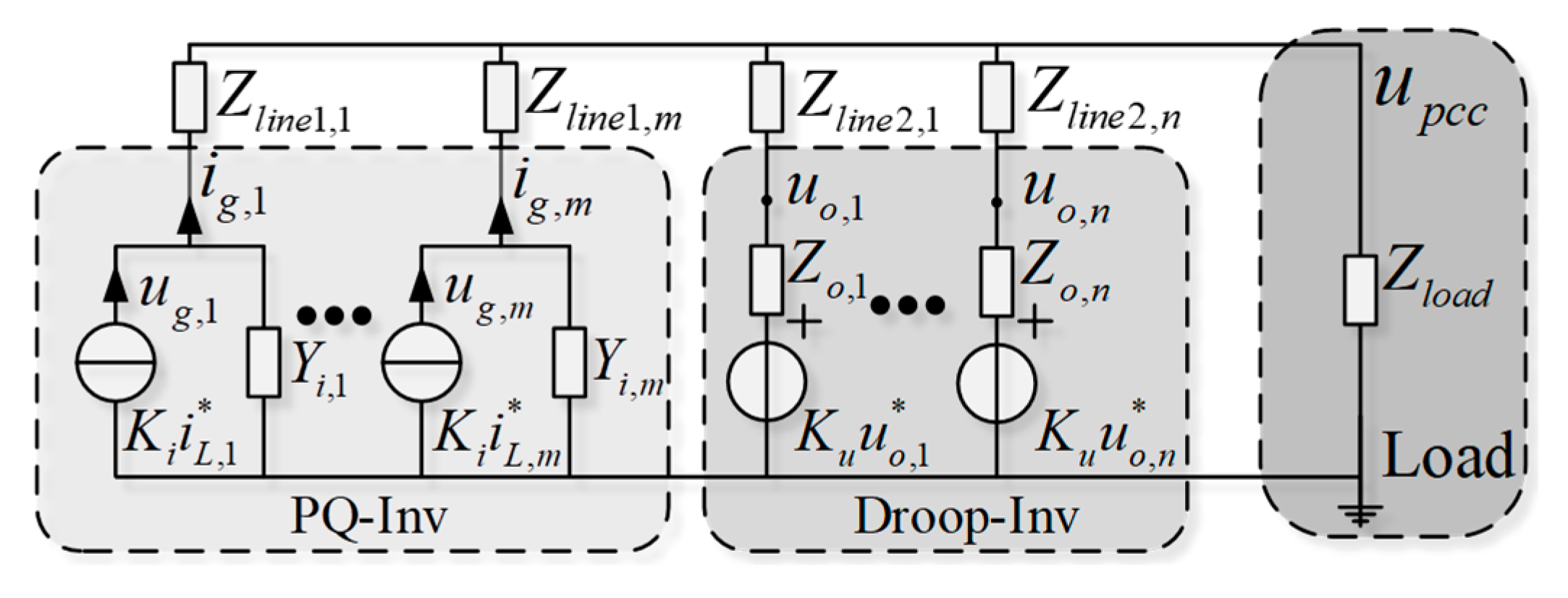
3. Parallel Inverter Model under the Island Condition
3.1. Establishment of Parallel Inverter Model
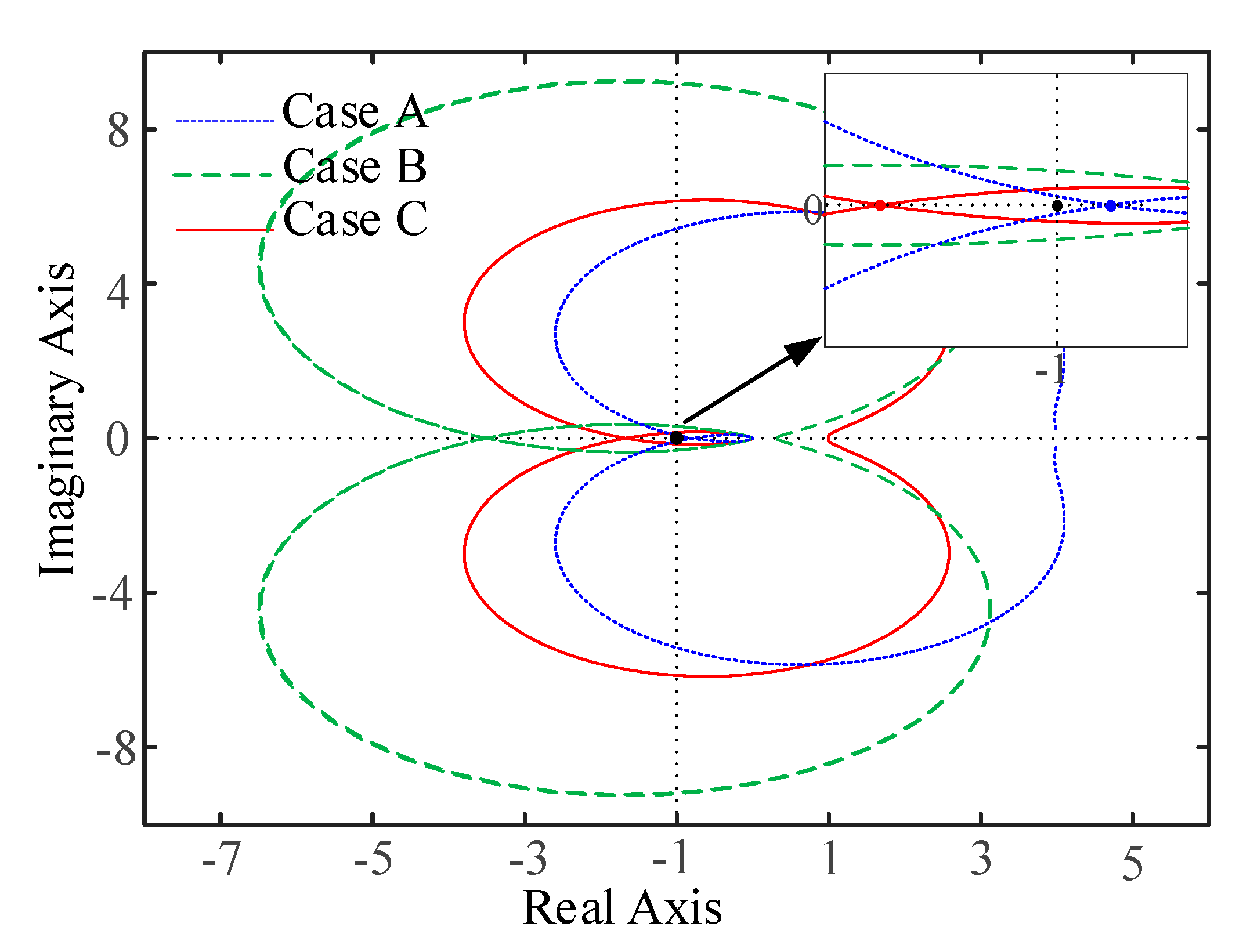
3.2. Stability Criterion Based on Impedance Model of Island Microgrid
4. Stability Analysis and System Simulation
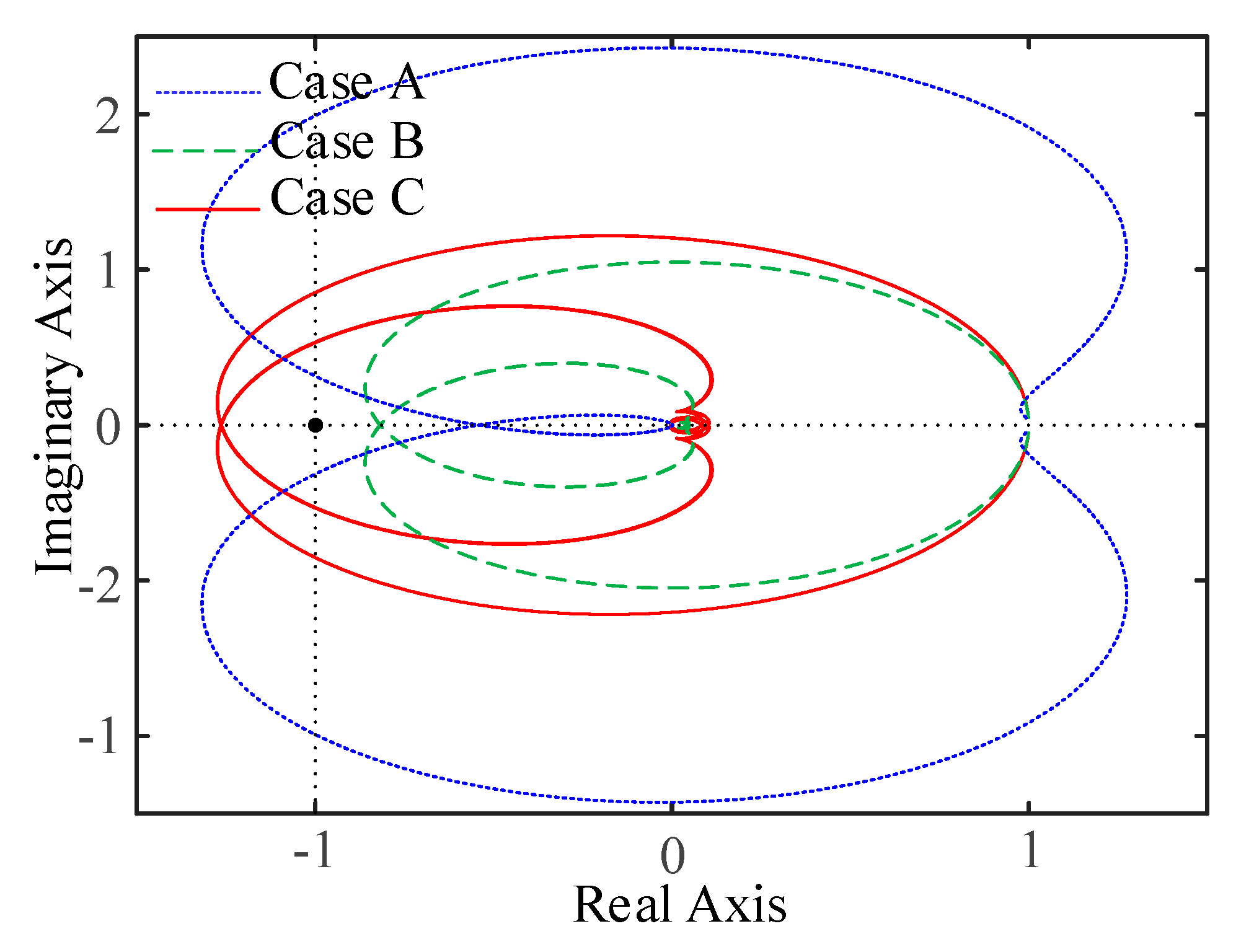
4.1. Effect of Current Loop PI on the Stability of Parallel System
4.2. Influence of Distribution Cable Impedance on System Stability
4.3. Effect of Different Inverter Number on System Stability
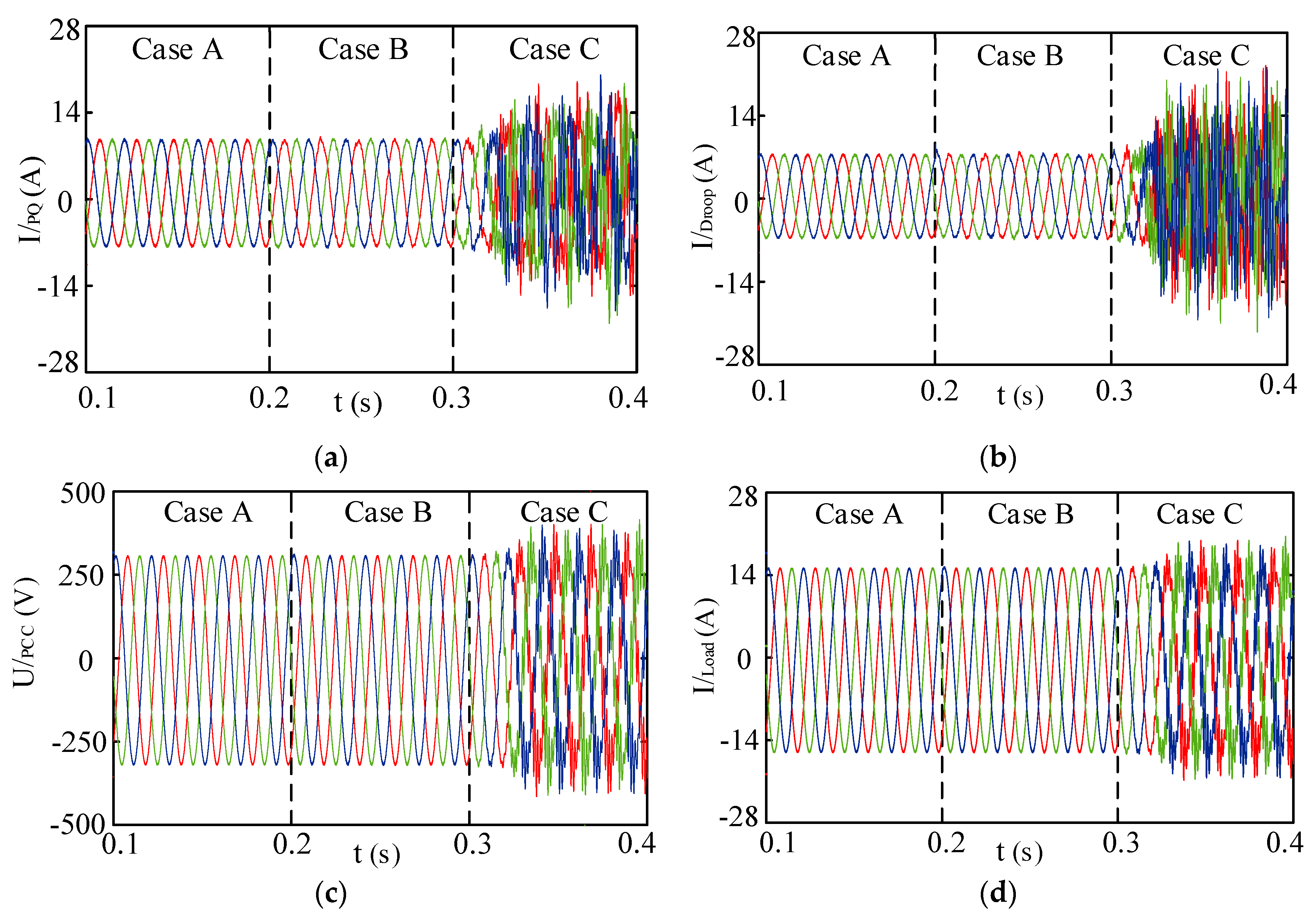
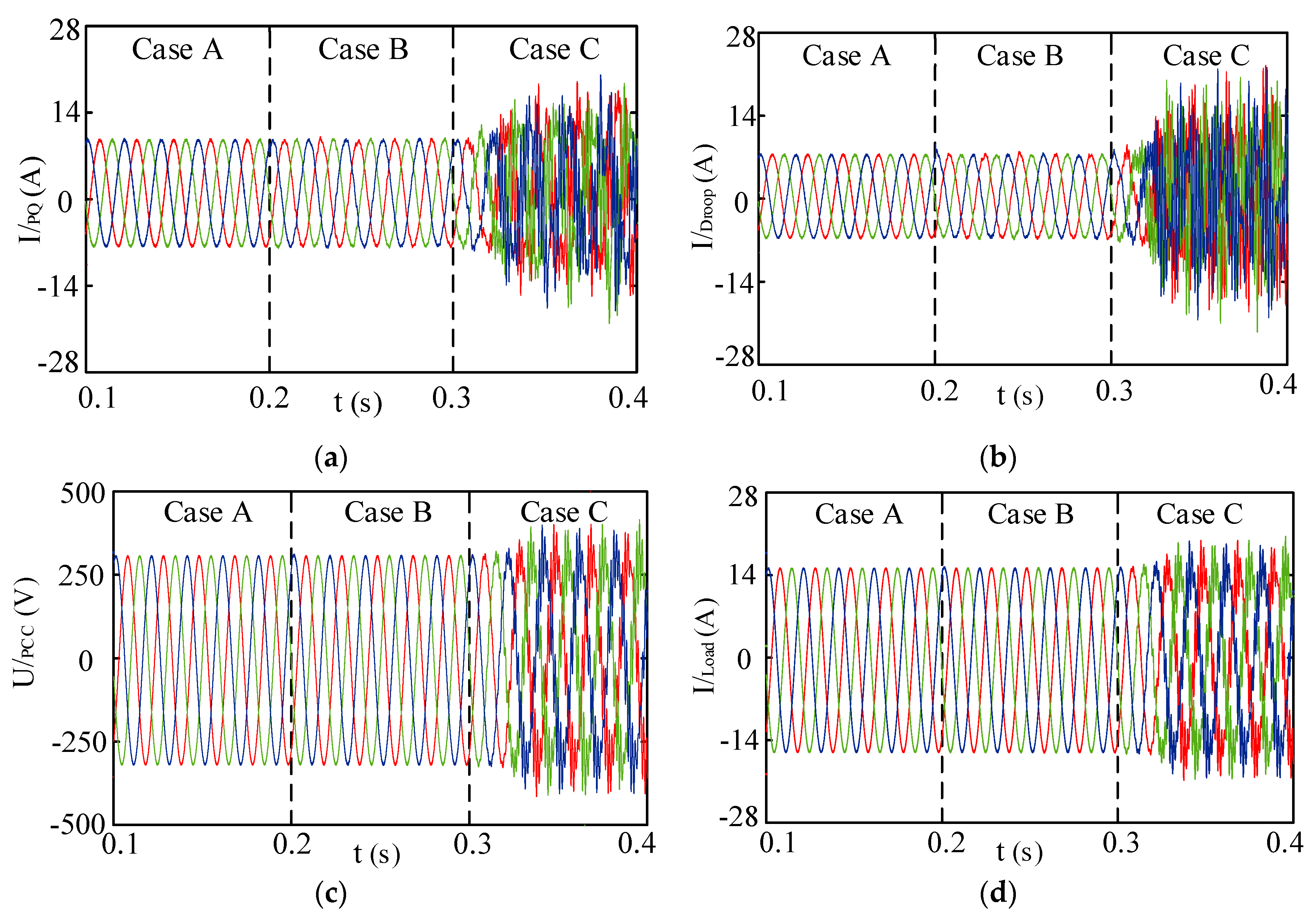
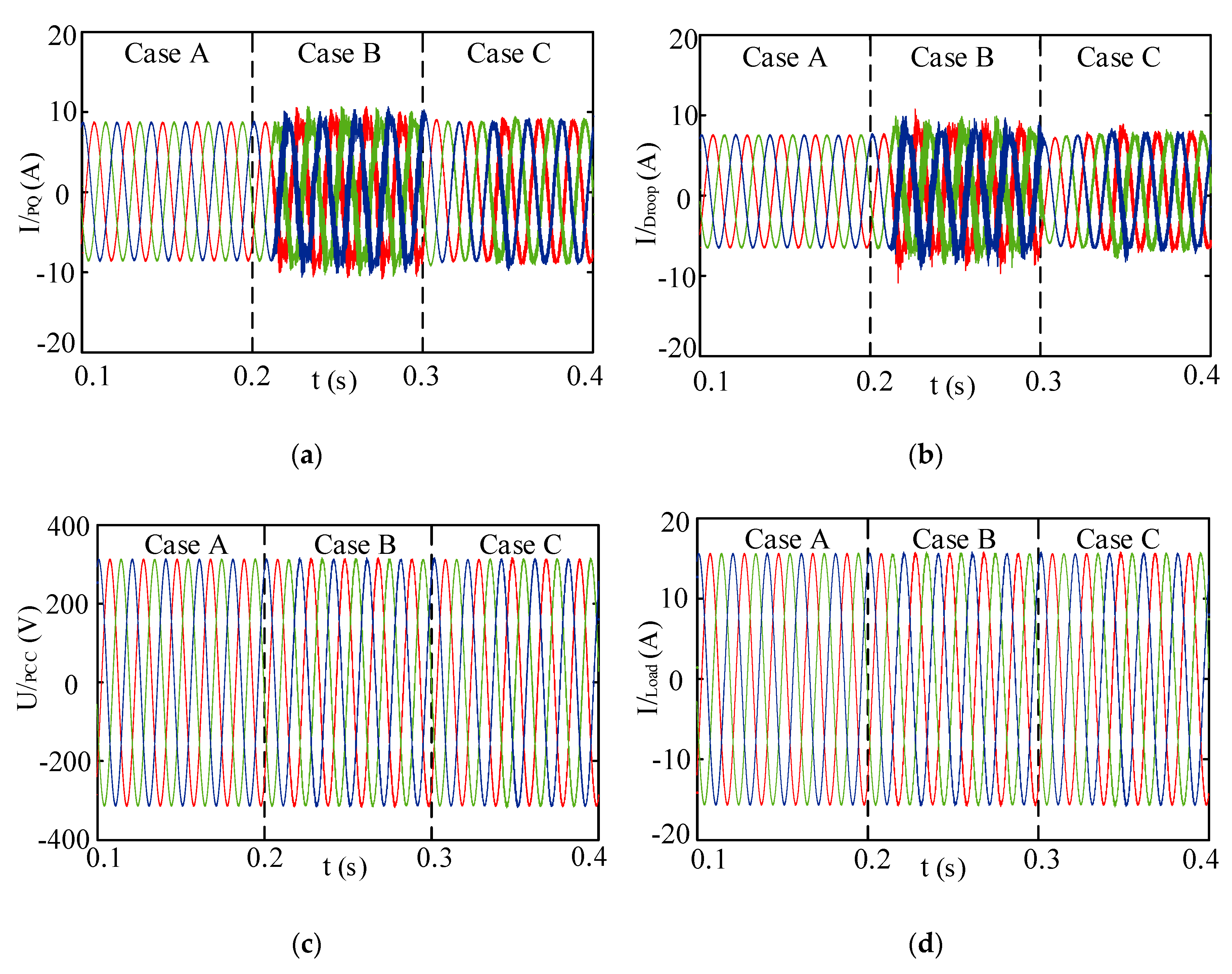
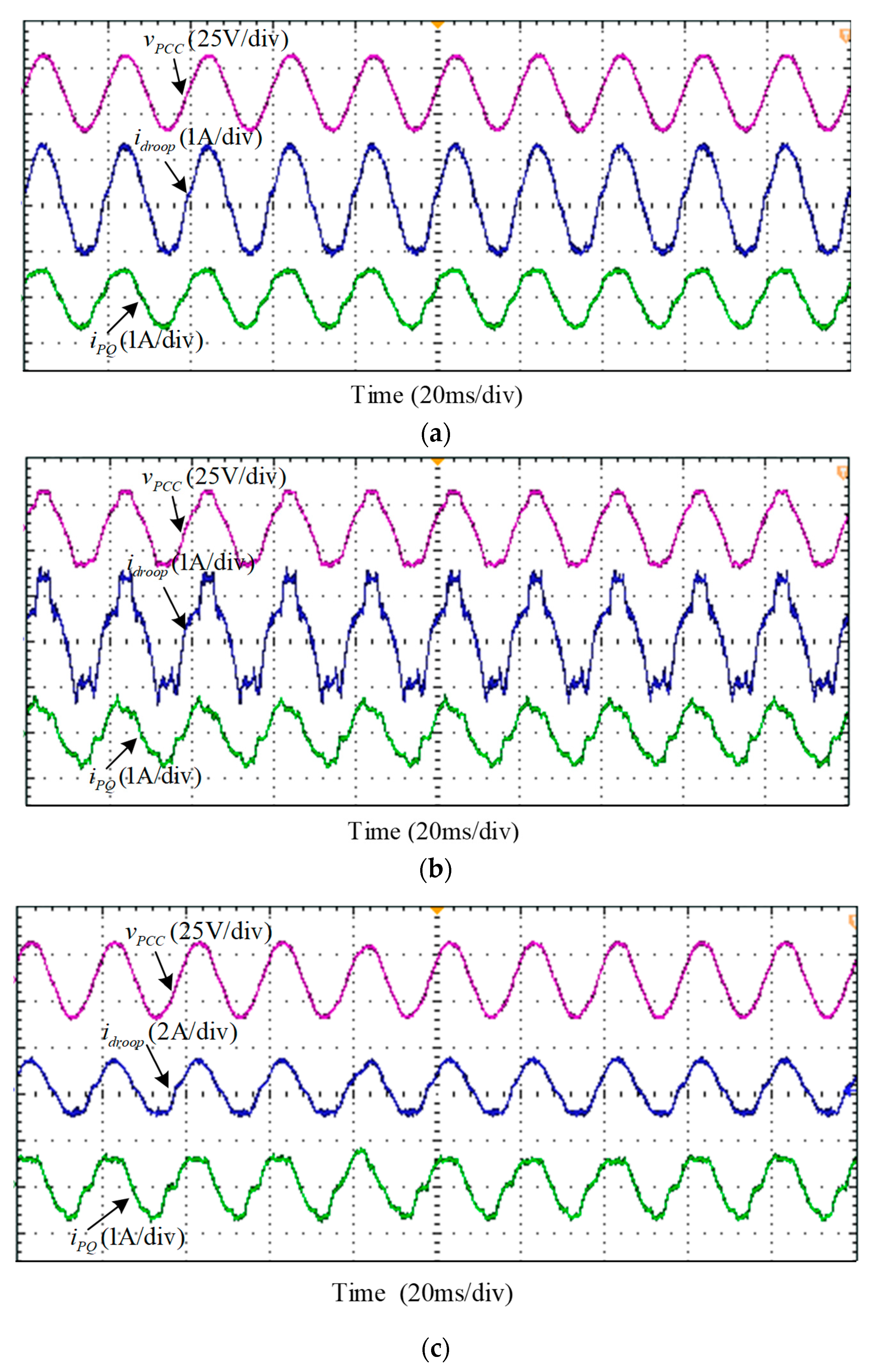
5. Experiment Results
6. Conclusions
- (1)
- The voltage at PCC is easier to be affected by the change of output impedance of PQ-controlled inverter in the island microgrid parallel system with PQ-controlled inverter and droop-controlled inverter. Therefore, the output impedance of droop-controlled inverter should be increased appropriately to enhance the stability of the system.
- (2)
- When the number of droop-controlled inverter is constant, the increase of the number of PQ-controlled inverter will easily cause resonance and reduce system stability, and when the number of PQ-controlled inverters is constant, increasing the number of droop-controlled inverters will contribute to system stability.
Author Contributions
Funding
Conflicts of Interest
References
- Ge, W.; Ma, T.; Zhu, Y.; Wang, S.; Gao, K.; Li, J. Research on Joint Planning of the Source-Grid-Load with New Energy System Energy Balance and Economy. In Proceedings of the 2018 International Conference on Engineering Simulation and Intelligent Control (ESAIC), Changsha, China, 24–25 August 2018; pp. 73–77. [Google Scholar]
- Baneshi, E.; Kalali, S.M.H.; Dehkordi, A.B. Microgrid Optimal Planning in Two Functional Modes Grid Connected and the Intentional Islanding. In Proceedings of the 2019 5th Conference on Knowledge Based Engineering and Innovation (KBEI), Tehran, Iran, 28 February–1 March 2019; pp. 857–863. [Google Scholar]
- Hasan, A.S.M.K.; Chowdhury, D.; Khan, M.Z.R. Scalable DC Microgrid Architecture with a One-Way Communication Based Control Interface. In Proceedings of the 2018 10th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2018; pp. 265–268. [Google Scholar]
- Pournazarian, B.; Karimyan, P.; Gharehpetian, G.B.; Abedi, M.; Pouresmaeil, E. Smart participation of PHEVs in controlling voltage and frequency of island microgrids. Int. J. Electr. Power Energy Syst. 2019, 110, 510–522. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Xiao, Z.; Wang, C.; Wang, S. Small-signal stability analysis of microgrid containing multiple micro sources. Autom. Electr. Power Syst. 2009, 33, 81–85. [Google Scholar]
- Kim, D.; Moon, Y.; Nam, H. SSR small-signal stability analysis program of power systems and its application to IEEE benchmark systems. In Proceedings of the IEEE Lausanne Power Tech, Lausanne, Switzerland, 1–5 July 2007. [Google Scholar]
- Wang, Y.; Wang, X.; Blaabjerg, F.; Chen, Z. Harmonic instability assessment using state-space modeling and participation analysis in inverter-fed power systems. IEEE Trans. Ind. Electron. 2017, 64, 806–816. [Google Scholar] [CrossRef]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Wang, S.; Chen, J.; Gong, C. Impedance-phased dynamic control method for grid-connected inverters in a weak grid. IEEE Trans. Power Electron. 2017, 32, 274–283. [Google Scholar] [CrossRef]
- Lv, J.; Cai, X. Harmonic linearization based impedance modeling of modular multilevel converters. Autom. Electr. Power Syst. 2017, 41, 136–142. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q Small-Signal Impedance of Grid-Tied Inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A modified sequence-domain impedance definition and its equivalence to the dq-domain impedance definition for the stability analysis of ac power electronic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Xie, X.; Huang, J.; Zhang, C.; Yin, C. Frequency-coupled Impedance Model and Stability Analysis of Grid-connected Converter. Autom. Electr. Power Syst. 2019, 43, 138–146. [Google Scholar]
- Nian, H.; Yang, H. Impedance modeling and stability analysis of grid-connected inverters under unbalanced operation conditions. Autom. Electr. Power Syst. 2016, 40, 76–83. [Google Scholar]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified Impedance Model of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef] [Green Version]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Small-Signal Stability Analysis of Three-Phase AC Systems in the Presence of Constant Power Loads Based on Measured d-q Frame Impedances. IEEE Trans. Power Electron. 2015, 30, 5952–5963. [Google Scholar] [CrossRef]
- Belkhayat, M. Stability Criteria for Ac Power Systems with Regulated Loads. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, December 1997. [Google Scholar]
- Bakhshizadeh, M.K.; Wang, X.; Blaabjerg, F.; Hjerrild, J.; Kocewiak, L.; Bak, C.L.; Hesselbæk, B. Couplings in phase domain impedance modeling of grid-connected converters. IEEE Trans. Power Electron. 2016, 31, 6792–6796. [Google Scholar]
- Wen, B.; Burgos, R.; Boroyevich, D.; Mattavelli, P.; Shen, Z. AC Stability Analysis and dq Frame Impedance Specifications in Power-Electronics-Based Distributed Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1455–1465. [Google Scholar] [CrossRef]
- Zhang, X.; Chung, H.S.; Cao, L.L.; Chow, J.P.W.; Wu, W. Impedance-based stability criterion for multiple offshore inverters connected in parallel with long cables. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 3383–3389. [Google Scholar]
- Alenius, H.; Berg, M.; Luhtala, R.; Roinila, T.; Messo, T. Impedance-Based Stability Analysis of Multi-Parallel Inverters Applying Total Source Admittance. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 16–19 June 2019; pp. 1–8. [Google Scholar]
- Wang, X.; Blaabjerg, F.; Loh, P.C. An impedance-based stability analysis method for paralleled voltage source converters. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 1529–1535. [Google Scholar]
- Wen, B.; Dong, D.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2016, 31, 26–38. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P. Modeling the output impedance of three-phase uninterruptible power supply in D-Q frame. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 163–169. [Google Scholar]
- Corradini, L.; Mattavelli, P.; Corradin, M.; Polo, F. Analysis of parallel operation of uninterruptible power supplies loaded through long wiring cables. IEEE Trans. Power Electron. 2010, 25, 1046–1054. [Google Scholar] [CrossRef]
- Han, Y.; Li, Z.; Yang, P.; Wang, C.; Xu, L.; Guerrero, J.M. Analysis and design of improved weighted average current control strategy for LCL-type grid-connected inverter. IEEE Trans. Energy Convers. 2017, 32, 941–952. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inverter Parameters | |
|---|---|
| Public parameter | Value |
| DC voltage Udc | 700 V |
| Switching frequency fs | 15 kHz |
| Rated fundamental frequency | 50 Hz |
| Rated phase voltage magnitude Uo | 311 V |
| Filter inductor L | 4 mH |
| Parasitic resistor of filter inductor RL | 0.1 Ω |
| Filter capacitor C | 20 μF |
| Droop controlled-inverter parameter | Value |
| Voltage proportional coefficient Kpu | 2 |
| Voltage integral coefficient Kiu | 200 |
| Current proportional coefficient Kpi | 0.5 |
| Current integral coefficient Kii | 80 |
| Distribution cable resistance Rline | 0.01 Ω |
| Distribution cable inductance Lline | 0.3 mH |
| PQ controlled-inverter parameter | Value |
| Current proportional coefficient Kpi | 0.8 |
| Current integral coefficient Kii | 120 |
| Distribution cable resistance Rline | 0.01 Ω |
| Distribution cable inductance Lline | 0.3 mH |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Qing, H.; Huang, P.; Zhang, C. Modeling and Stability Analysis of Parallel Inverters in Island Microgrid. Electronics 2020, 9, 463. https://doi.org/10.3390/electronics9030463
Wang X, Qing H, Huang P, Zhang C. Modeling and Stability Analysis of Parallel Inverters in Island Microgrid. Electronics. 2020; 9(3):463. https://doi.org/10.3390/electronics9030463
Chicago/Turabian StyleWang, Xiaohuan, Hongyang Qing, Peng Huang, and Chunjiang Zhang. 2020. "Modeling and Stability Analysis of Parallel Inverters in Island Microgrid" Electronics 9, no. 3: 463. https://doi.org/10.3390/electronics9030463
APA StyleWang, X., Qing, H., Huang, P., & Zhang, C. (2020). Modeling and Stability Analysis of Parallel Inverters in Island Microgrid. Electronics, 9(3), 463. https://doi.org/10.3390/electronics9030463