Towards Software Based Optical Communication Methods for the Assistance of Docking Autonomous Underwater Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature and Related Work
2.1. Acoustic and Electromagnetic Communication
2.2. Optical Communication
3. Methodology
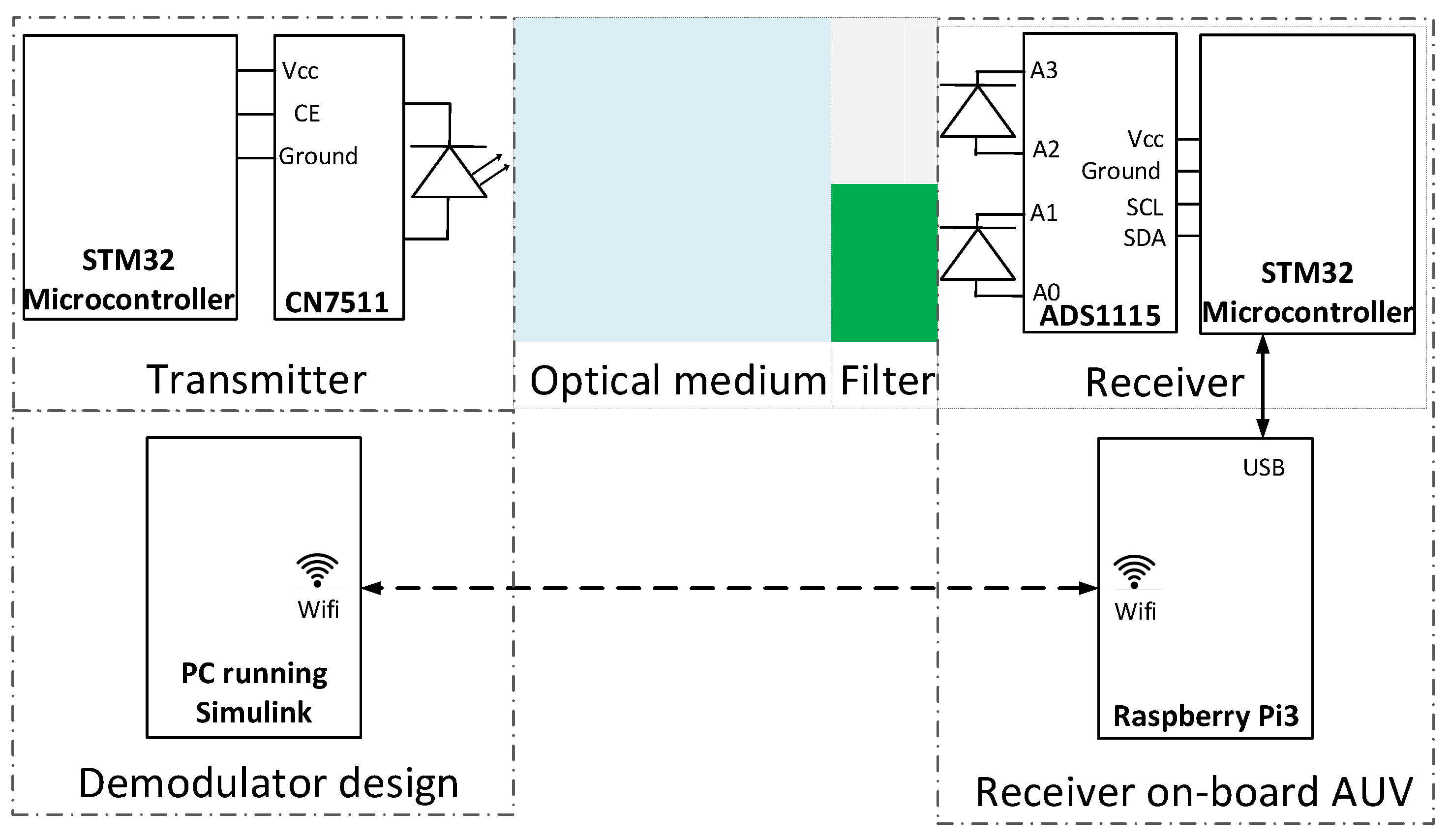
3.1. Transmitter Hardware
3.2. Receiver Hardware
3.3. Software Development Strategy
3.4. Modulation and Transmission
3.5. Hardware Implementation
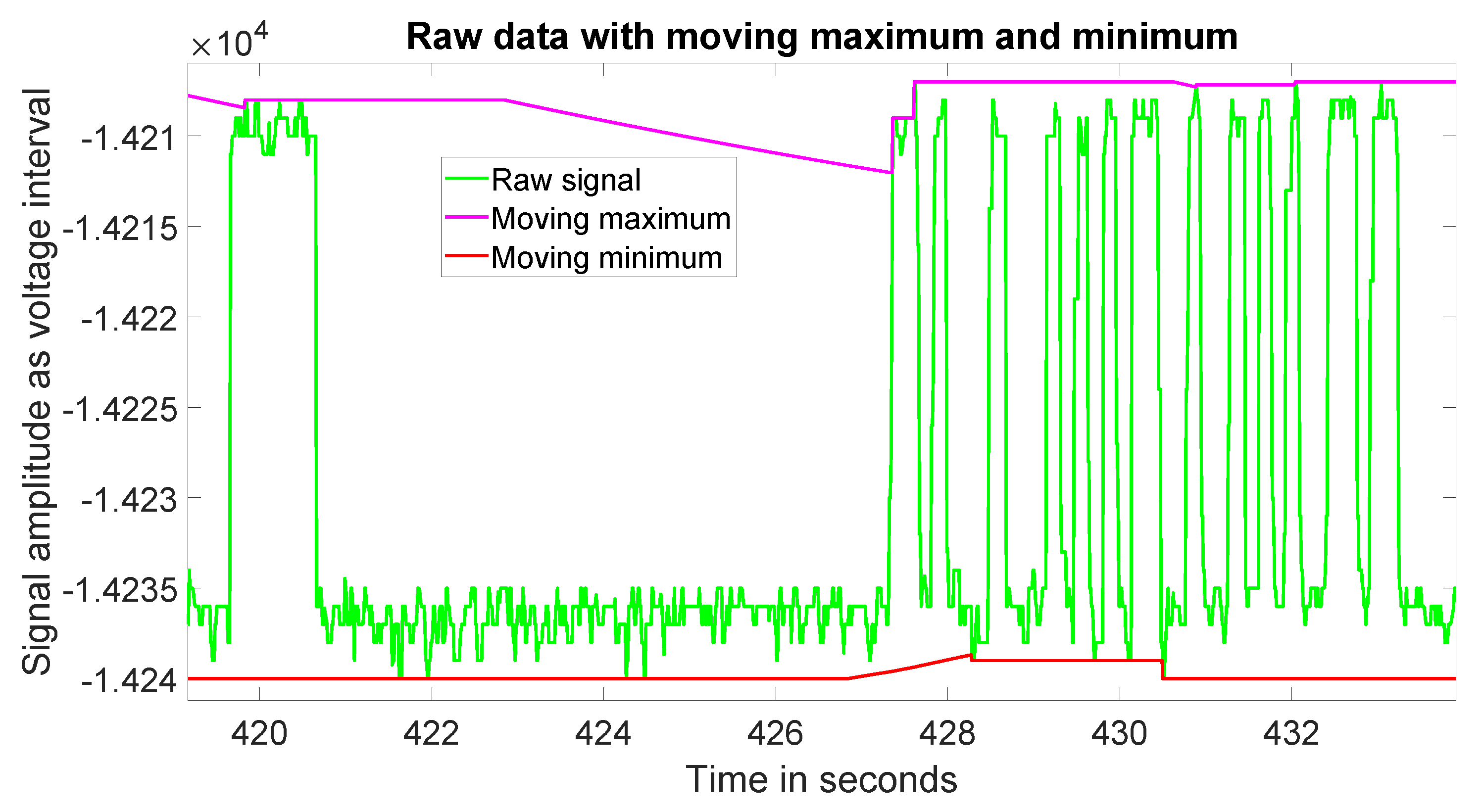
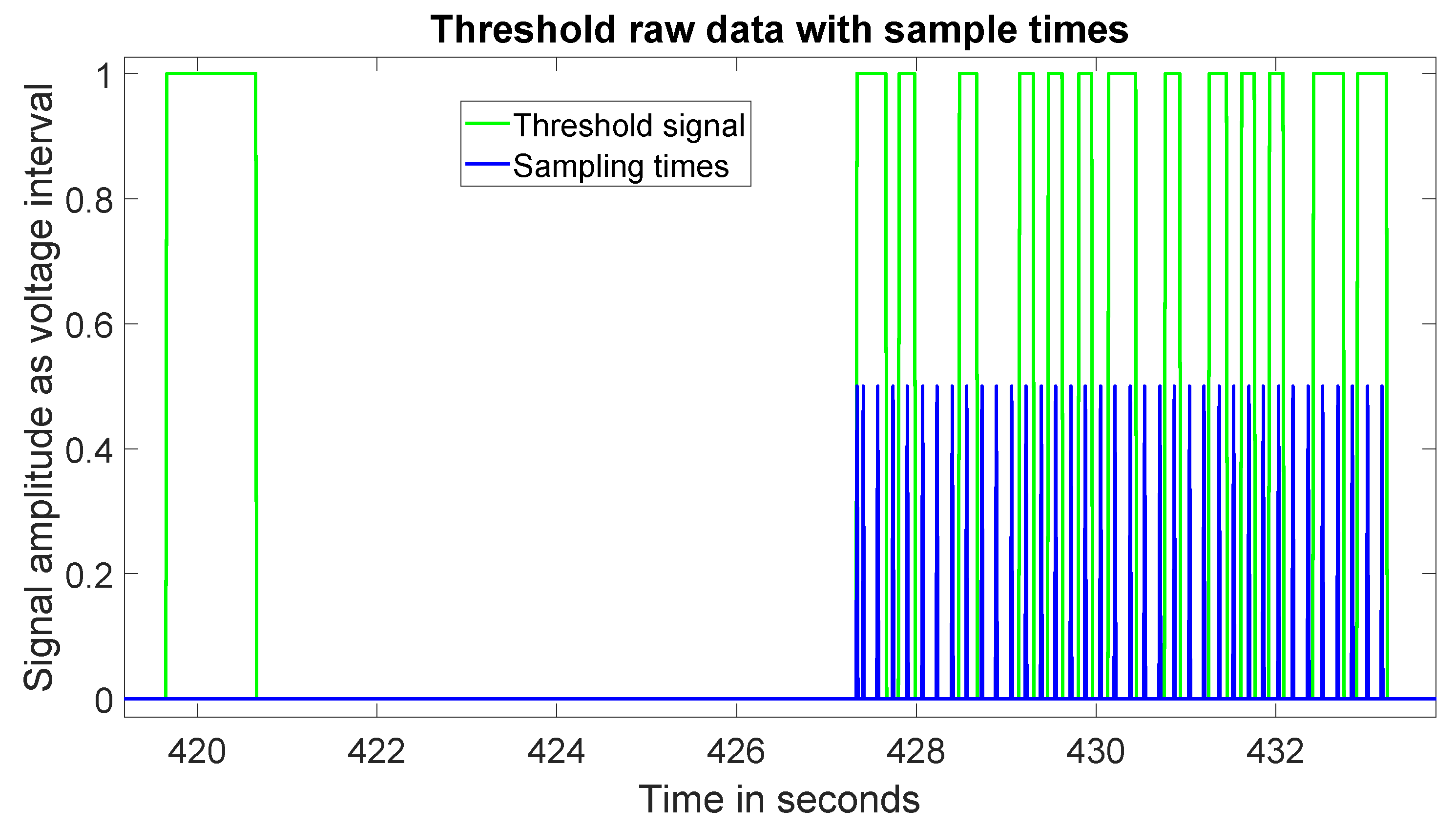
3.6. Demodulation Design Using Real World Data
| Algorithm 1 State based thresholding algorithm |
Input variables: Input Constants: Persistent variables: Output:
|
4. Experimentation
4.1. Experiment 1
4.2. Experiment 2
5. Results and Discussion
5.1. Experiment 1
5.2. Experiment 2
6. Conclusions and Further Work
Author Contributions
Funding
Conflicts of Interest
References
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Saeed, N.; Celik, A.; Al-Naffouri, T.Y.; Alouini, M.S. Underwater optical wireless communications, networking, and localization: A survey. Ad Hoc Netw. 2019, 94, 101935. [Google Scholar] [CrossRef] [Green Version]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Vallicrosa, G.; Bosch, J.; Palomeras, N.; Ridao, P.; Carreras, M.; Gracias, N. Autonomous homing and docking for AUVs using Range-Only Localization and Light Beacons. IFAC-PapersOnLine 2016, 49, 54–60. [Google Scholar] [CrossRef]
- Li, D.J.; Chen, Y.H.; Shi, J.G.; Yang, C.J. Autonomous underwater vehicle docking system for cabled ocean observatory network. Ocean Eng. 2015, 109, 127–134. [Google Scholar] [CrossRef]
- McEwen, R.; Hobson, B.; McBride, L.; Bellingham, J. Docking Control System for a 54-cm-Diameter (21-in) AUV. Ocean. Eng. IEEE J. 2008, 33, 550–562. [Google Scholar] [CrossRef]
- Lin, A.; Tong, Z.; Song, Y.; Kong, M.; Xu, J. Underwater Wireless Optical Communication System Using Blue LEDs. J. Phys. Conf. Ser. 2016, 679, 012032. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Ozay, M.; Okatani, T.; Xu, H.; Sun, K.; Lin, Y. Detection and Pose Estimation for Short-Range Vision-Based Underwater Docking. IEEE Access 2019, 7, 2720–2749. [Google Scholar] [CrossRef]
- Bosch, J.; Gracias, N.; Ridao, P.; Istenič, K.; Romagós, D. Close-Range Tracking of Underwater Vehicles Using Light Beacons. Sensors 2016, 16, 429. [Google Scholar] [CrossRef] [PubMed]
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal Garcia, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV homing and docking for remote operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- Keller, K.M. Sonar Based Positioning and Docking for Autonomous Underwater Vehicles. Ph.D. Thesis, Department of Electrical Engineering and Electronics, The University of Liverpool, Liverpool, UK, 2002. [Google Scholar]
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Abdou, A.; Shaw, A.; Mason, A.; Al-Shamma’a, A.; Cullen, J.; Wylie, S.; Diallo, M. A matched Bow-tie antenna at 433 MHz for use in underwater wireless sensor networks. J. Phys. Conf. Ser. 2013, 450, 012048. [Google Scholar] [CrossRef] [Green Version]
- Johnson, L.; Jasman, F.; Green, R.J.; Leeson, M. Recent advances in underwater optical wireless communications. Underw. Technol. 2014, 32, 167–175. [Google Scholar] [CrossRef]
- Smart, J.H. Underwater optical communications systems part 1: Variability of water optical parameters. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005; Volume 2, pp. 1140–1146. [Google Scholar] [CrossRef]
- Mobley, C. Light and Water: Radiative Transfer in Natural Waters; Academic Press Inc., 1994. [Google Scholar]
- Smith, R.; Baker, K. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef] [PubMed]
- Giles, J.W.; Bankman, I.N. Underwater optical communications systems. Part 2: Basic design considerations. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005; Volume 3, pp. 1700–1705. [Google Scholar] [CrossRef]
- Sticklus, J.; Adam Hoeher, P.; Röttgers, R. Optical Underwater Communication: The Potential of Using Converted Green LEDs in Coastal Waters. IEEE J. Ocean. Eng. 2018, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wen, D.; Cai, W.; Pan, Y. Design of underwater optical communication system. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Farr, N.E.; Pontbriand, C.T.; Ware, J.D.; Pelletier, L.A. Non-visible light underwater optical communications. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Baiden, G.; Bissiri, Y.; Masoti, A. Paving the way for a future underwater omni-directional wireless optical communication systems. Ocean Eng. 2009, 36, 633–640. [Google Scholar] [CrossRef]
- De León, J.C.B.; Restrepo-Martínez, A.; Branch-Bedoya, J.W. Computational analysis of Bayer colour filter arrays and demosaicking algorithms in digital photoelasticity. Opt. Lasers Eng. 2019, 122, 195–208. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- DeMarco, K.; West, M.E.; Collins, T.R. An implementation of ROS on the Yellowfin autonomous underwater vehicle (AUV). In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Hatamian, M.; Barati, H.; Berenjian, S.; Naghizadeh, A.; Razeghi, B. Error control coding in optical fiber communication systems: An overview. ACSIJ Adv. Comput. Sci. Int. J. 2015, 4. Available online: http://www.acsij.org/acsij/article/view/117 (accessed on 5 February 2020).
- Anguita, D.; Brizzolara, D.; Parodi, G. VHDL modules and circuits for Underwater optical wireless communication systems. Wseas Trans. Commun. 2010, 9, 525–552. Available online: https://www.researchgate.net/publication/228650154 (accessed on 18 January 2020).







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grindley, J.; McAree, O.; Ateeq, M.; Abdullah, B.; Bezombes, F. Towards Software Based Optical Communication Methods for the Assistance of Docking Autonomous Underwater Vehicles. Electronics 2020, 9, 655. https://doi.org/10.3390/electronics9040655
Grindley J, McAree O, Ateeq M, Abdullah B, Bezombes F. Towards Software Based Optical Communication Methods for the Assistance of Docking Autonomous Underwater Vehicles. Electronics. 2020; 9(4):655. https://doi.org/10.3390/electronics9040655
Chicago/Turabian StyleGrindley, Josef, Owen McAree, Muhammad Ateeq, Badr Abdullah, and Frederic Bezombes. 2020. "Towards Software Based Optical Communication Methods for the Assistance of Docking Autonomous Underwater Vehicles" Electronics 9, no. 4: 655. https://doi.org/10.3390/electronics9040655
APA StyleGrindley, J., McAree, O., Ateeq, M., Abdullah, B., & Bezombes, F. (2020). Towards Software Based Optical Communication Methods for the Assistance of Docking Autonomous Underwater Vehicles. Electronics, 9(4), 655. https://doi.org/10.3390/electronics9040655