On the Application of Machine Learning to the Design of UAV-Based 5G Radio Access Networks



Abstract
:1. Introduction
1.1. Related Work
2. Application Scenarios
2.1. UAV-Mounted Base Stations
2.2. UAV-Based Cooperation
2.3. UAV-Based Software-Defined Networks
3. Technical Challenges and Requirements
3.1. Payload and Flight-Time Constraints
3.2. Optimal UAV Placement and Trajectory Optimization
3.3. Channel Acquisition and Reconstruction
3.4. Backhauling
4. ML-Based Designs
4.1. Radio Resource Allocation
4.2. Design of Collectors and Relays
4.3. Choice of the Type of UAV
4.4. Choice of the Number of UAVs Acting as BSs
4.5. Positioning of UAVs Acting as BSs
4.6. Design of a Mobile Cloud/Cloudlet
5. Conclusions, Open Problems, and Future Directions
Author Contributions
Funding
Conflicts of Interest
References
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Optimal Transport Theory for Cell Association in UAV-Enabled Cellular Networks. IEEE Commun. Lett. 2017, 21, 2053–2056. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet of Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Orfanus, D.; de Freitas, E.P.; Eliassen, F. Self-Organization as a Supporting Paradigm for Military UAV Relay Networks. IEEE Commun. Lett. 2016, 20, 804–807. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Maunder, R.G.; Hanzo, L. Taking Drones to the Next, Level: Cooperative Distributed Unmanned-Aerial-Vehicular Networks for Small and Mini Drones. IEEE Veh. Technol. Mag. 2017, 12, 73–82. [Google Scholar] [CrossRef] [Green Version]
- Gamal, A.E.; Mammen, J.; Prabhakar, B.; Shah, D. Throughput-Delay Trade-Off in Wireless Networks; IEEE INFOCOM 2004: Piscataway, NJ, USA, 2004; Volume 1, p. 475. [Google Scholar] [CrossRef] [Green Version]
- Tareque, M.H.; Hossain, M.S.; Atiquzzaman, M. On the routing in Flying Ad Hoc Networks. In Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V.; Bennis, M.; Kumar, R. UAV-Assisted Heterogeneous Networks for Capacity Enhancement. IEEE Commun. Lett. 2016, 20, 1207–1210. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Wireless Communication Using Unmanned Aerial Vehicles (UAVs): Optimal Transport Theory for Hover Time Optimization. IEEE Trans. Wirel. Commun. 2017, 16, 8052–8066. [Google Scholar] [CrossRef]
- Chen, M.; Saad, W.; Yin, C. Resource Management for Wireless Virtual Reality: Machine Learning Meets Multi-Attribute Utility. In Proceedings of the 2017 IEEE Global Communications Conference (GLOBECOM), Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, H.; Ren, Y.; Han, Z.; Chen, K.C.; Hanzo, L. Machine Learning Paradigms for Next,-Generation Wireless Networks. IEEE Wirel. Commun. 2017, 24, 98–105. [Google Scholar] [CrossRef] [Green Version]
- Bhutani, G. Application of Machine-Learning Based Prediction Techniques in Wireless Networks. Int. J. Commun. Netw. Syst. Sci. 2014, 7, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Cengiz, R. Location Estimation of Base Station of Mobile Phones Using Artificial Neural Networks. Master’s Thesis, Kadir Has University, Istanbul, Turkey, 2016. [Google Scholar]
- Foerster, J.N.; Assael, Y.M.; de Freitas, N.; Whiteson, S. Learning to Communicate with Deep Multi-Agent Reinforcement Learning. arXiv 2016, arXiv:1605.06676. [Google Scholar]
- Ayoul, T.; Buckley, T.; Crevier, F. UAV Navigation above Roads Using Convolutional Neural Networks; Technical Report; Stanford University: Stanford, CA, USA, 2017. [Google Scholar]
- Konam, S. Vision-Based Navigation and Deep-Learning Explanation for Autonomy. Master’s Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2017. [Google Scholar]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A Review of Deep Learning Methods and Applications for Unmanned Aerial Vehicles. J. Sens. 2017, 2017, 13. [Google Scholar] [CrossRef]
- Bayerlein, H.; Kerret, P.D.; Gesbert, D. Trajectory Optimization for Autonomous Flying Base Station via Reinforcement Learning. In Proceedings of the IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Imran, M.A. Distributed Drone Base Station Positioning for Emergency Cellular Networks Using Reinforcement Learning. Cogn. Comput. 2018, 10, 790–804. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Xiao, L.; Dai, C. UAV-Aided 5G Communications with Deep Reinforcement Learning Against Jamming. arXiv 2018, arXiv:1805.06628. [Google Scholar]
- Wang, Z. The Applications of Deep Learning on Traffic Identification; BlackHat: San Francisco, CA, USA, 2015. [Google Scholar]
- Samek, W.; Stanczak, S.; Wiegand, T. The Convergence of Machine Learning and Communications. arXiv 2017, arXiv:1708.08299. [Google Scholar]
- Sheppard, C.; Rahnemoonfar, M. Real-time scene understanding for UAV imagery based on deep convolutional neural networks. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2243–2246. [Google Scholar] [CrossRef]
- Di, M.; Joo, E.M. A survey of machine learning in Wireless Sensor networks From networking and application perspectives. In Proceedings of the 2007 6th International Conference on Information, Communications, and Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Navabi, S.; Wang, C.; Bursalioglu, O.Y.; Papadopoulos, H. Predicting Wireless Channel Features using Neural Networks. In Proceedings of the 2018 IEEE international Conference on Communications, Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Palossi, D.; Loquercio, A.; Conti, F.; Flamand, E.; Scaramuzza, D.; Benini, L. Ultra Low Power Deep-Learning-powered Autonomous Nano Drones. arXiv 2018, arXiv:1805.01831v4. [Google Scholar]
- Qiu, C.; Zhang, Y.; Feng, Z.; Zhang, P.; Cui, S. Spatio-Temporal Wireless Traffic Prediction With Recurrent Neural Network. IEEE Wirel. Commun. Lett. 2018, 7, 554–557. [Google Scholar] [CrossRef]
- Zhang, Q.; Mozaffari, M.M.; Saad, W.; Bennis, M.; Debbah, M. Machine Learning for Predictive On-Demand Deployment of UAVs for Wireless Communications. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Zeng, Y.; Xu, J.; Zhang, R. Energy Minimization for Wireless Communication With Rotary-Wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Joint Sum-Rate and Power Gain Analysis of an Aerial Base Station. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Bor-Yaliniz, I.; Yanikomeroglu, H. The New Frontier in RAN Heterogeneity: Multi-Tier Drone-Cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef] [Green Version]
- Azizi, A.; Mokari, N.; Javan, M.R. Joint Radio Resource Allocation, 3D Placement and User Association of Aerial Base Stations in IoT Networks. arXiv 2017, arXiv:1710.05315. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Munaye, Y.; Lin, H.; Adege, A.; Tarekegn, G. UAV Positioning for Throughput Maximization Using Deep Learning Approaches. Sensors 2019. [Google Scholar] [CrossRef]
- Bithas, P.; Michailidis, E.; Nomikos, N.; Vouyioukas, D.; Kanatas, A. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Optimal transport theory for power-efficient deployment of unmanned aerial vehicles. In Proceedings of the IEEE Int. Conf. Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Nishiyama, H.; Kawamoto, Y.; Takaishi, D. On OFDM-Based Resource Allocation in LTE Radio Management System for Unmanned Aerial Vehicles (UAVs). In Proceedings of the IEEE 86th Vehicular Technology Conf. (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gapeyenko, M.; Petrov, V.; Moltchanov, D.; Andreev, S.; Himayat, N.; Koucheryavy, Y. Flexible and Reliable UAV-Assisted Backhaul Operation in 5G mmWave Cellular Networks. IEEE J. Sel. Areas Commun. 2018, 36, 2486–2496. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Internet of Things: Can UAVs Provide an Energy-Efficient Mobile Architecture? In Proceedings of the IEEE Global Communications Conf. (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Performance Optimization for UAV-Enabled Wireless Communications under Flight Time Constraints. In Proceedings of the GLOBECOM 2017–2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. 3D Cellular Network Architecture with Drones for beyond 5G. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Yatnalli, U.; Gesbert, D. Learning radio maps for UAV-aided wireless networks: A segmented regression approach. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the Sky: Proactive Deployment of Cache-Enabled Unmanned Aerial Vehicles for Optimized Quality-of-Experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Laneman, J.N.; Tse, D.N.C.; Wornell, G.W. Cooperative diversity in wireless networks: Efficient protocols and outage behavior. IEEE Trans. Inf. Theory 2004, 50, 3062–3080. [Google Scholar] [CrossRef]
- Jeong, S.; Simeone, O.; Kang, J. Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning. IEEE Trans. Veh. Technol. 2018, 67, 2049–2063. [Google Scholar] [CrossRef] [Green Version]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the Number and 3D Placement of Drone Base Stations in Wireless Cellular Networks. In Proceedings of the IEEE 84th Vehicular Technology Conf. (VTC-Fall). IEEE, Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kopeikin, A.N.; Ponda, S.S.; Johnson, L.B.; Toupet, O.; How, J.P. Real-time dynamic planning to maintain network connectivity in a team of unmanned air vehicles. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1303–1307. [Google Scholar] [CrossRef] [Green Version]
- Matolak, D.W. Unmanned aerial vehicles: Communications challenges and future aerial networking. In Proceedings of the Networking and Communications (ICNC) 2015 International Conference Computing, Garden Grove, CA, USA, 16–19 February 2015; pp. 567–572. [Google Scholar] [CrossRef]
- Merwaday, A.; Guvenc, I. UAV assisted heterogeneous networks for public safety communications. In Proceedings of the IEEE Wireless Communications and Networking Conf. Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 329–334. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned Aerial Vehicle With Underlaid Device-to-Device Communications: Performance and Tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, J.; Ding, G.; Wang, L.; Tsiftsis, T.A.; Sharma, P.K. Resource Allocation for Energy Harvesting-Powered D2D Communication Underlaying UAV-Assisted Networks. IEEE Trans. Green Commun. Netw. 2018, 2, 14–24. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Adege, A.B.; Wang, L.; Jeng, S.; Chen, J. Machine Learning Based Rapid 3D Channel Modeling for UAV Communication Networks. In Proceedings of the 2019 16th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–5. [Google Scholar]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Luo, X. Air-to-Air Path Loss Prediction Based on Machine Learning Methods in Urban Environments. Wirel. Commun. Mob. Comput. 2018, 2018, 1–9. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, L.; Lu, B.; Jin, N.; Guo, L.; Liu, J.; Sun, H.; Liu, H. Unmanned Aerial Vehicle Detection Based on Channel State Information. In Proceedings of the 2018 IEEE International Conference on Sensing, Communication and Networking (SECON Workshops), Hong Kong, China, 11–13 June 2018; pp. 1–5. [Google Scholar]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3D placement of an aerial base station in next generation cellular networks. In Proceedings of the IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S.; Rasheed, T.; Goratti, L.; Reynaud, L.; Grace, D.; Bucaille, I.; Wirth, T.; et al. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef]
- Mirahsan, M.; Schoenen, R.; Yanikomeroglu, H.; Senarath, G.; Dung-Dao, N. User-in-the-loop for hethetnets with backhaul capacity constraints. IEEE Wirel. Commun. 2015, 22, 50–57. [Google Scholar] [CrossRef]
- Mirahsan, M.; Schoenen, R.; Yanikomeroglu, H. HetHetNets: Heterogeneous Traffic Distribution in Heterogeneous Wireless Cellular Networks. IEEE J. Sel. Areas Commun. 2015, 33, 2252–2265. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Saad, W.; Bennis, M.; Lu, X.; Debbah, M.; Zuo, W. Predictive Deployment of UAV Base Stations in Wireless Networks: Machine Learning Meets Contract Theory. arXiv 2018, arXiv:1811.01149. [Google Scholar]
- Theodoridis, S. Machine Learning: A Bayesian and Optimization Perspective, 1st ed.; Academic Press, Inc.: Cambridge, MA, USA, 2015. [Google Scholar]
- Kaleem, Z.; Khaliq, M.Z.; Khan, A.; Ahmad, I.; Duong, T.Q. PS-CARA: Context-Aware Resource Allocation Scheme for Mobile Public Safety Networks. Sensors 2018, 18, 1473. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Kosmides, P.; Adamopoulou, E.; Demestichas, K.; Anagnostou, M.; Rouskas, A. On Intelligent Base Station Activation for Next, Generation Wireless Networks. Procedia Comput. Sci. 2015, 63, 82–88. [Google Scholar] [CrossRef] [Green Version]
- Barroca, C.; Grilo, A.; Pereira, P.R. Improving Message Delivery in UAV-based Delay Tolerant Networks. In Proceedings of the 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST), Lisbon, Portugal, 15–17 October 2018; pp. 1–7. [Google Scholar]
- Pearre, B.; Brown, T. Model-free Trajectory Optimization for Wireless Data Ferries among Multiple Sources. In Proceedings of the IEEE Globecom Workshops, Miami, FL, USA, 6–10 December 2011. [Google Scholar] [CrossRef]
- Pham, Q.V.; Fang, F.; Vu, H.N.; Le, M.; Ding, Z.; Le, L.B.; Hwang, W.J. A Survey of Multi-Access Edge Computing in 5G and Beyond: Fundamentals, Technology Integration, and State-of-the-Art. arXiv 2019, arXiv:1906.08452. [Google Scholar]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A Review on IoT Deep Learning UAV Systems for Autonomous Obstacle Detection and Collision Avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Shi, Y.; Tsang, I.W.; Ong, Y.; Gong, C.; Shen, X. Survey on Multi-Output Learning. IEEE Trans. Neural Netw. Learn. Syst. 2019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Islambouli, R.; Sharafeddine, S. Optimized 3D Deployment of UAV-Mounted Cloudlets to Support Latency-Sensitive Services in IoT Networks. IEEE Access 2019, 7, 172860–172870. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RL Elements | UAV Speed | UAV Location |
|---|---|---|
| Action | Changing UAV speed | Changing location |
| State | Current UAV speed | Current UAV location |
| Reward | Increase total throughput | Increase coverage |
| U-RAN Applications | ML Method | Features | Output or Label | RL Reward Functions/Actions |
|---|---|---|---|---|
| Radio resource | mostly SL, | flight time and speed, | number of A2G | reward: number |
| allocation | RL | RAN interface, | connections | of connected links; |
| path-loss map, | actions: changing | |||
| weather conditions | link direction, | |||
| adding/removing | ||||
| radio links | ||||
| UAV collectors/ | RL & SL | SINR at the devices, | UAV speed | reward: amount |
| relays | activation period, | of collected data; | ||
| required data rate, | actions: movement/speed | |||
| delay sensitivity, | ||||
| features of the UAVs | ||||
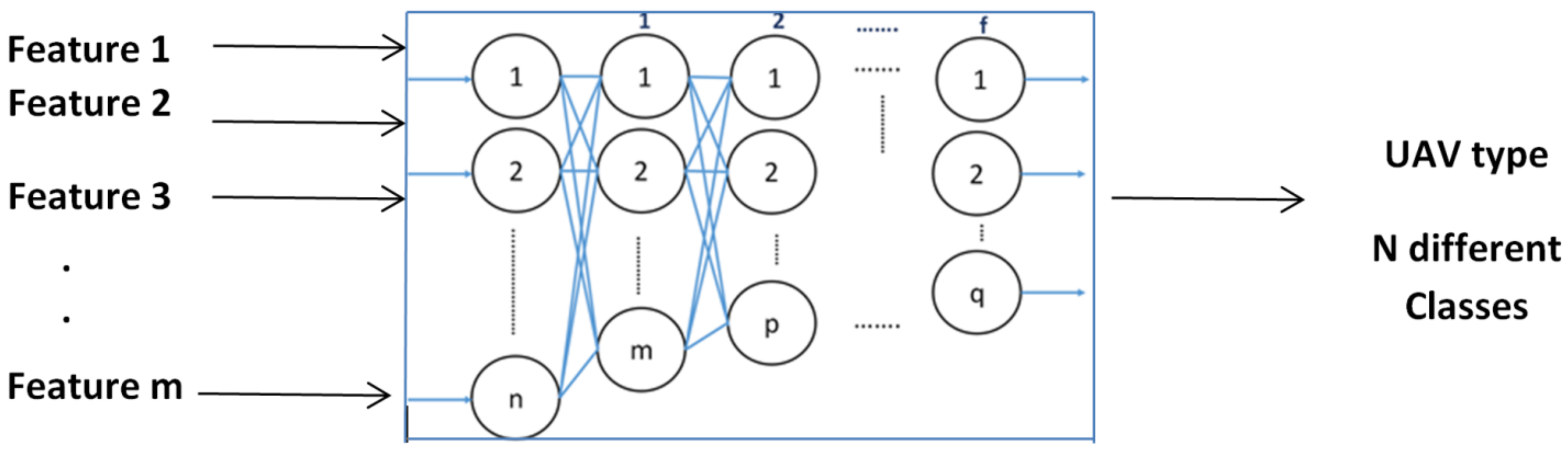
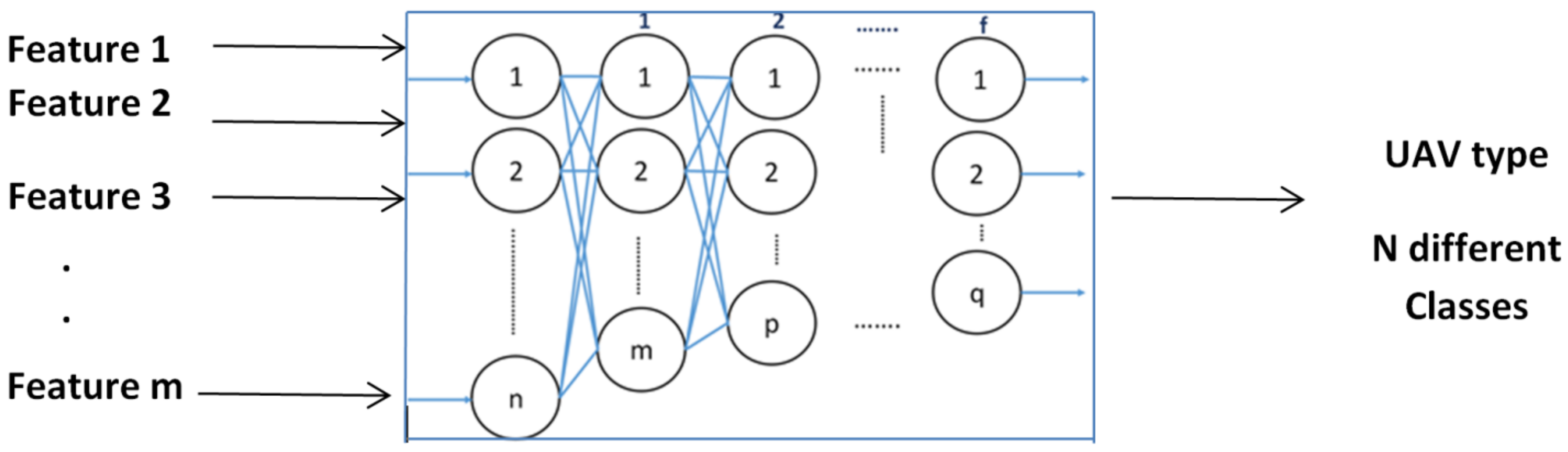
| Type of UAV | SL | UAV hovering time, | classification | |
| speed range, | of the UAV | |||
| storage capacity, | − | |||
| download/upload speed, | ||||
| users traffic requirements | ||||
| Number of | mostly SL, | user behavior | number of UAVs | reward: throughput; |
| UAV-BSs | RL & SL | at a certain time slot | actions: add one | |
| more UAV to the area | ||||
| Positions of | RL/MOSL | interference sensitivity, | 3D UAV locations | reward: energy |
| UAV-BSs | density, data rate, | consumption and number | ||
| delay sensitivity, | of satisfied users; | |||
| reliability | actions: changing | |||
| UAV positions | ||||
| Mobile cloudlet | mostly SL, | users density, | number of UAVs, | reward: percentage |
| RL & SL | users communication | number of cloudlets, | of satisfied users; | |
| requirements, | speed of cloudlets, | actions: increasing | ||
| U-RANs features | data rate of cloudlets | cloudlet speed |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouhdaragh, V.; Verde, F.; Gelli, G.; Abouei, J. On the Application of Machine Learning to the Design of UAV-Based 5G Radio Access Networks. Electronics 2020, 9, 689. https://doi.org/10.3390/electronics9040689
Kouhdaragh V, Verde F, Gelli G, Abouei J. On the Application of Machine Learning to the Design of UAV-Based 5G Radio Access Networks. Electronics. 2020; 9(4):689. https://doi.org/10.3390/electronics9040689
Chicago/Turabian StyleKouhdaragh, Vahid, Francesco Verde, Giacinto Gelli, and Jamshid Abouei. 2020. "On the Application of Machine Learning to the Design of UAV-Based 5G Radio Access Networks" Electronics 9, no. 4: 689. https://doi.org/10.3390/electronics9040689
APA StyleKouhdaragh, V., Verde, F., Gelli, G., & Abouei, J. (2020). On the Application of Machine Learning to the Design of UAV-Based 5G Radio Access Networks. Electronics, 9(4), 689. https://doi.org/10.3390/electronics9040689