1. Introduction
Climbing robots have significant potential applications in industry, which can be used to inspect and maintain large structures, such as dams [
1], bridges [
2], hulls [
3], and large industrial boilers [
4]. Therefore, great efforts have been made to develop robots that can climb in truss structures [
5,
6]. On the other hand, due to their high speed and high energy efficiency, wheeled vehicles have existed and developed for hundreds of years. How to integrate the best performance of two completely different mobile systems into a hybrid platform is a hot topic in robot research, which provides more possibilities for improving the robot’s ability to adapt to the environment [
7,
8,
9]. In order to solve this problem, this paper studies the mechanism of wheeled-legged robots and how the motion planning of hybrid motion contributes to the motion control scheme for the hybrid locomotion of wheeled-legged robots.
The hybrid motion system with wheels improves the flexibility and environmental adaptability of the system and provides more gait. The Centaur robot is equipped with wheel steering and articulated legs to adjust its supporting gait in response to unknown disturbances [
7]. The design method of hybrid legged/wheeled mobile robots is demonstrated, and the walking, rolling, gliding and skating motions were generated by the novel trajectory optimization formulation [
8]. A Transleg was installed with four transformable leg-wheel mechanisms, similar to the compliant spine mechanism, which can realize the turning movement in legged-wheeled mode and the jumping gait in legged mode [
9]. By adding the wheel structure to improve the mechanism of the PCR [
10], the research on gait control can improve the flexibility and environmental adaptability of the PCR [
10].
From the perspective of structural design, pole-climbing robots can be divided into three types: soft climbing robots, legged climbing robots, and wheeled climbing robots. The inspiration of the soft climbing robot is inspired by bionics. The soft climbing robot is based on dielectric-elastomer artificial muscles and electroadhesive feet. The movement is realized by controlling the voltage applied to the actuator and foot to synchronize the body deformation and foot adhesion. This movement mechanism imitates the crawling caused by the movement of caterpillars. Therefore, auxiliary wheel execution cannot be added to this structure [
11].
The Climbot is a bio-inspired biped climbing robot composed of five joint modules and two grippers in a series [
6]. The cable climbing robot adopts a bilateral-wheeled mechanical structure to perform dynamic obstacle surmounting, which is composed of driving wheels and driven wheels. The task of climbing the cable is completed by the analysis of the track and torque of the wheel. This structure allows the wheels to complete the climbing cable, and limits their movement on the ground, so it does not have the function of the wheel in the normal sense [
12].
For a multi-degree-of-freedom connecting rod robot, the trajectory of the robot needs to be optimized. There are two main directions for solving the problem of optimal control: direct and indirect approaches. The direct approach reduces the optimal control problem to a nonlinear programming problem [
13] that provides the transition from the optimization problem in the infinite-dimensional space to the optimization problem in the finite-dimensional space; thus, it is more convenient and can be readily solved within a wider convergence region. The indirect approach based on the Pontryagin’s maximum principle (PMP) [
14] solves optimal control by formulating it as a boundary value problem where it is necessary to find the initial conditions for a system of differential equations for conjugate variables. The PMP was originally proposed to maximize the terminal speed of a rocket in space orbit, and it was also used to find the optimal control signal of the robot. In robot control optimization, the optimization of PMP was represented by Lagrangian and Hamiltonian mechanics [
15,
16,
17]. The free-floating planar manipulator of a flexible spacecraft simulator was built, and the optimal control of the model was carried out by using the Hamilton principle [
15].
The PMP principle and dynamic programming (DP) method can be used to plan the optimal motion mode of robots [
16]. The principle of PMP can also plan the vehicle path and realize it in the dynamic process [
17]. The PMP principle, combined with Newton mechanics, can find the best combination of static balance and trajectory planning in the process of robot motion [
18]. Its optimal solution has high accuracy, but it is very sensitive to the description of additional conditions that must be met for control, and it also guarantees the maximum value of the Hamiltonian method. For problems with complex phase constraints, the Hamiltonian method is usually difficult to set in practice.
However, these works generally focus on the nominal trajectory performance without considering possible uncertainties. In practice, on the right-hand sides of the models, there are objectively some uncertainties of various nature. As a rule, they are not taken into account, but the presence of such uncertainties can lead to the loss of optimality of the obtained control [
19].
There are also some methods to consider the influence of uncertainty when designing the reference orbit in advance [
20,
21,
22]. For example, in the process of motion control, the uncertain performance of parameters was used to establish the optimal control scheme [
20]. Desensitization optimal control [
22] modifies the nominal optimal trajectory to reduce its sensitivity to uncertain parameters. This involves constructing an appropriate sensitivity cost that, when penalized, provides solutions that are relatively insensitive to parametric uncertainties.
Model Predictive Control (MPC) scheme is an optimal model-based control strategy that has been quite popular in the process industry in the last decades, while in recent years, there has been a major shift for its adoption in the area of robotics [
23].
Due to the complexity of kinematics models with joint structures, the numerical method is an effective method for solving kinematics models. The sequential quadratic programming (SQP) method is one of the most successful methods to solve the problem of nonlinear constraint minimization [
24]. The SQP algorithm is used to solve the inverse kinematics problem of humanoid robots with a redundancy [
25].
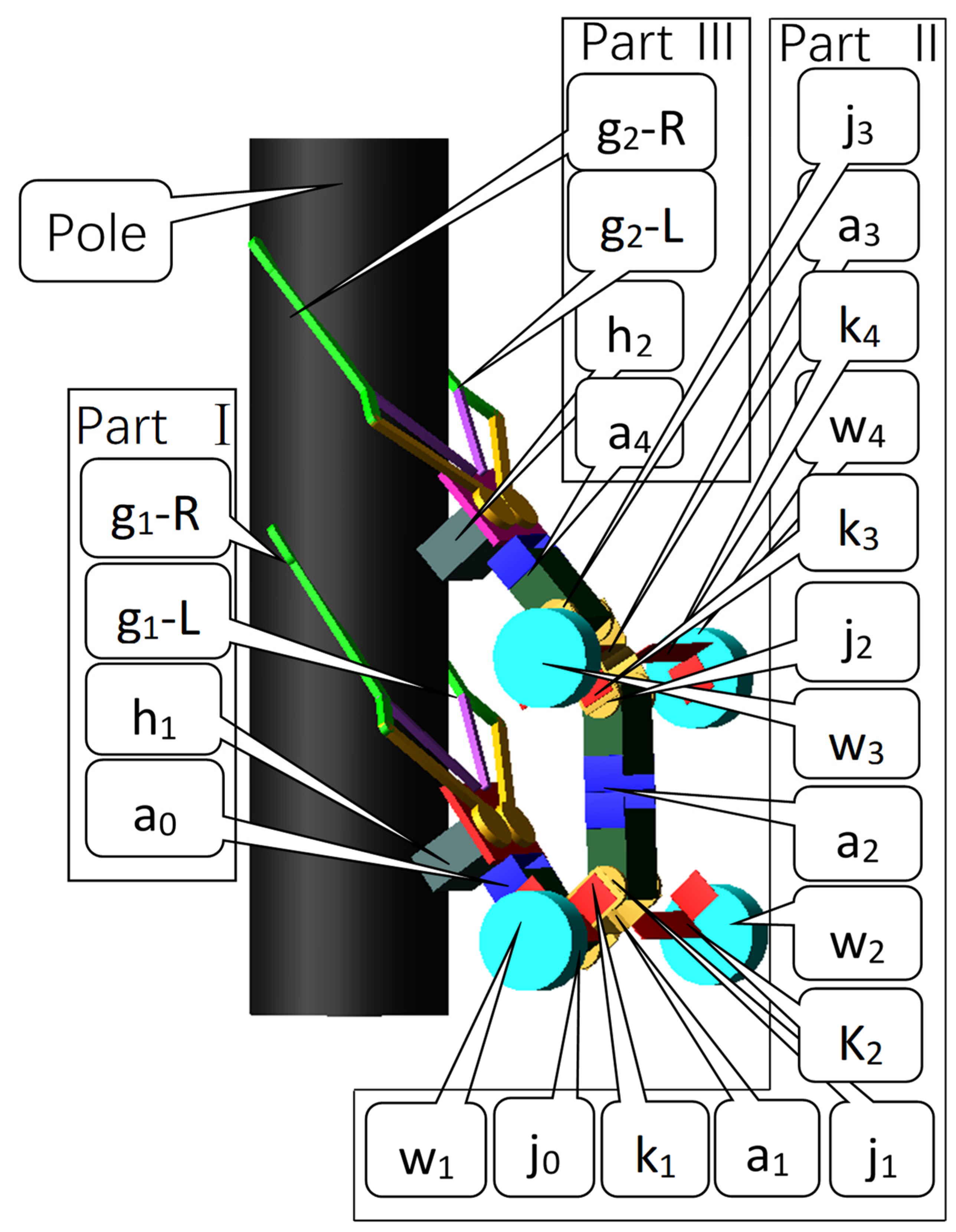
In this study, we designed and developed a wheeled-legged pole-climbing robot named the WL_PCR. The WL_PCR consists of a two-legged structure and a four-wheeled structure that achieves the locomotion of the climbing pole and ground travel. The main contributions of the study are as follows.
We designed and developed the WL_PCR.
We had developed a movement strategy for the ground-to-pole transition, which has not done with the other pole-climbing robot.
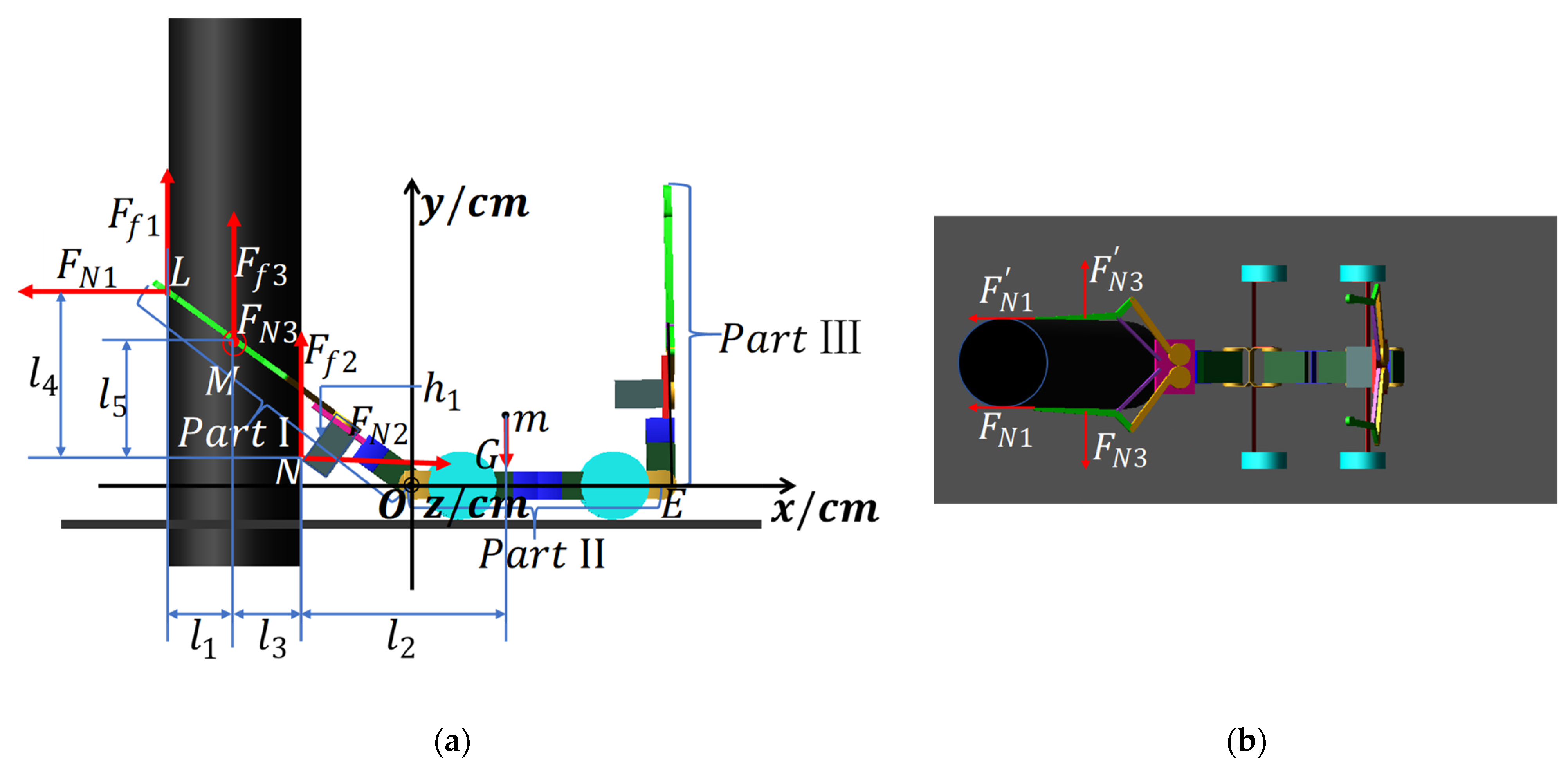
We used the sequential quadratic programming algorithm to do the force analysis of static and dynamic process, and a flip locomotion control scheme to determine its motion conditions.
We explored the possibilities of motion strategies through simulation analysis. We proved the performance of the WL_PCR through experiments.
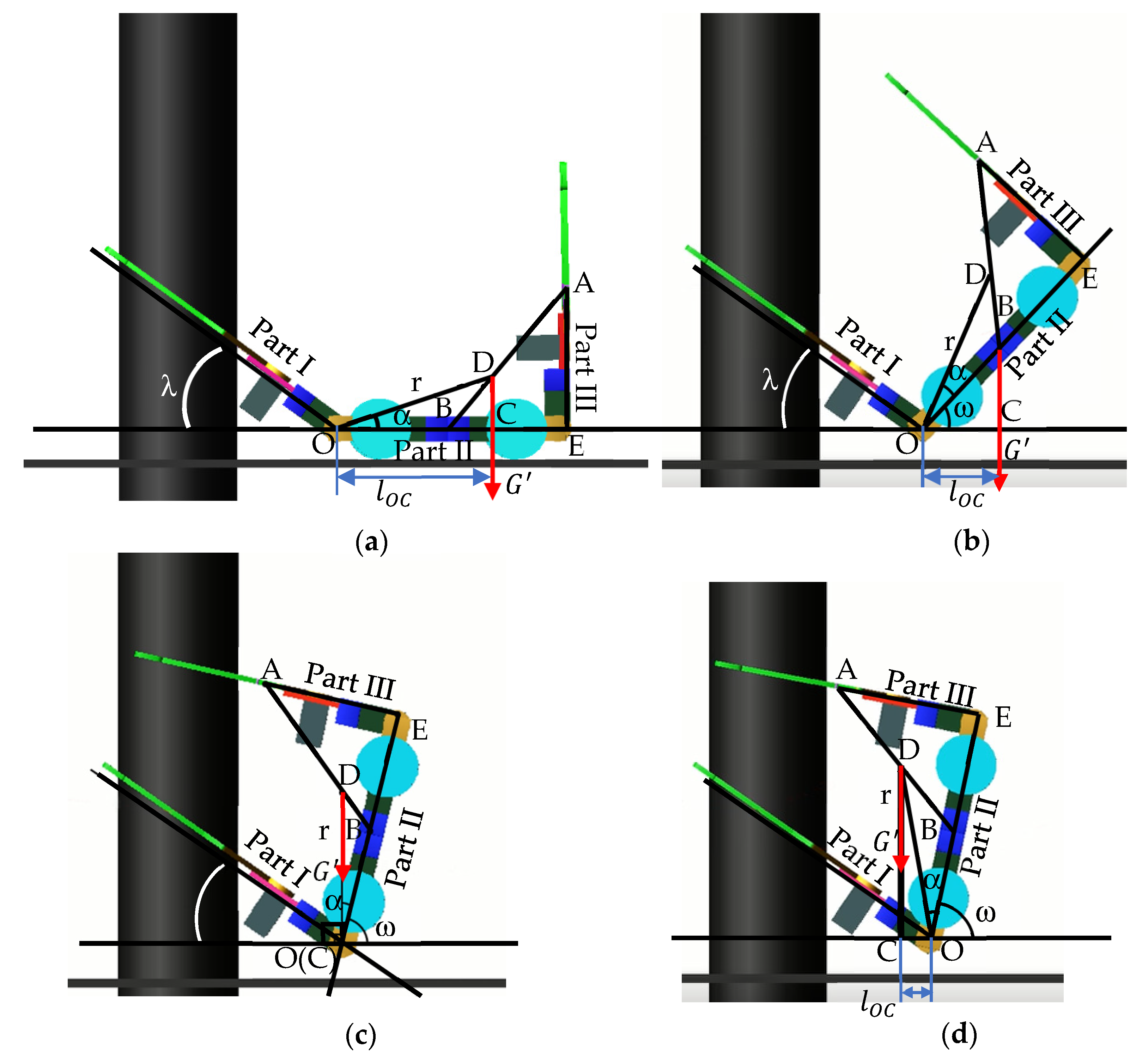
The rest of this article is organized as follows. In the second section, the design of the WL_PCR is introduced. The third section analyzes the ground-to-pole transition, including the static force analysis, the force analysis of dynamic process and the flip locomotion. The experimental results are presented and discussed in
Section 4. Finally, the conclusions are summarized in
Section 5.
4. Experiments
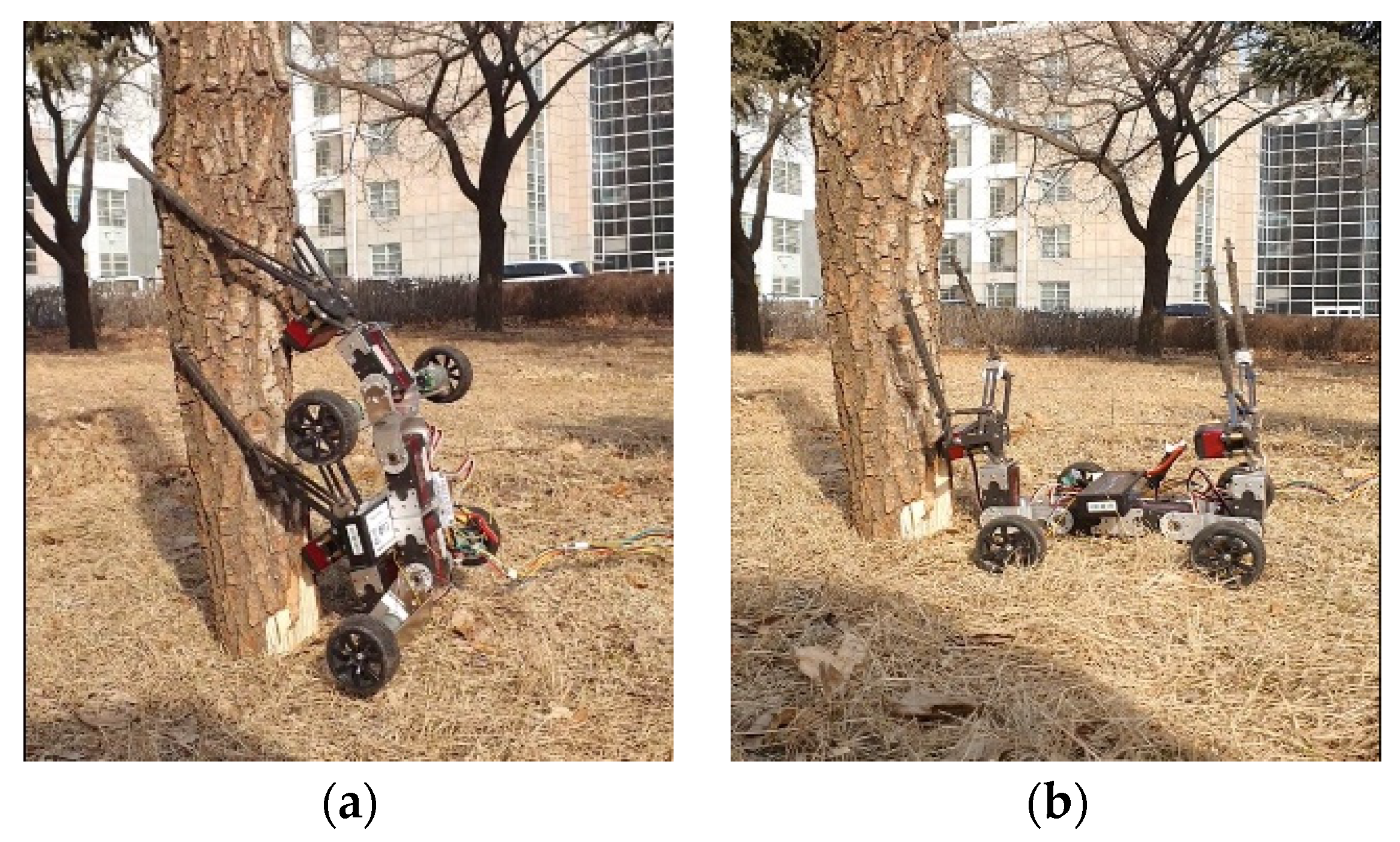
According to the motion planning and control scheme of the ground-to-pole transition, the feasibility of simulation results is verified by experiments.
In the experiment, the trunk with a diameter of 14 cm was selected as the climbing pole. The tree grows evenly and the diameter of the selected climbing area of the trunk is almost the same. We set three groups of control parameters to control the transition gait of the robot, and the parameters are shown in
Table 5.
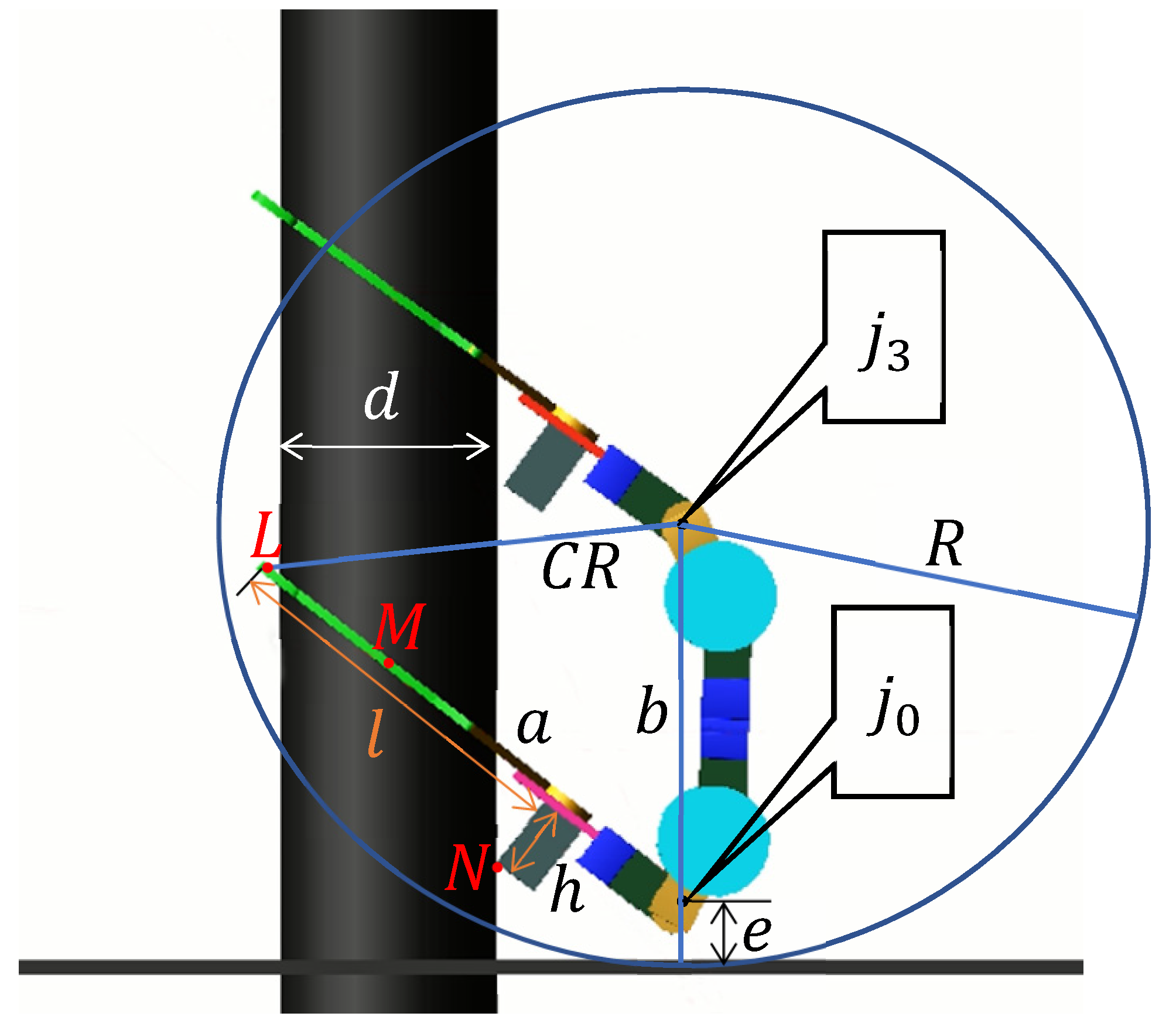
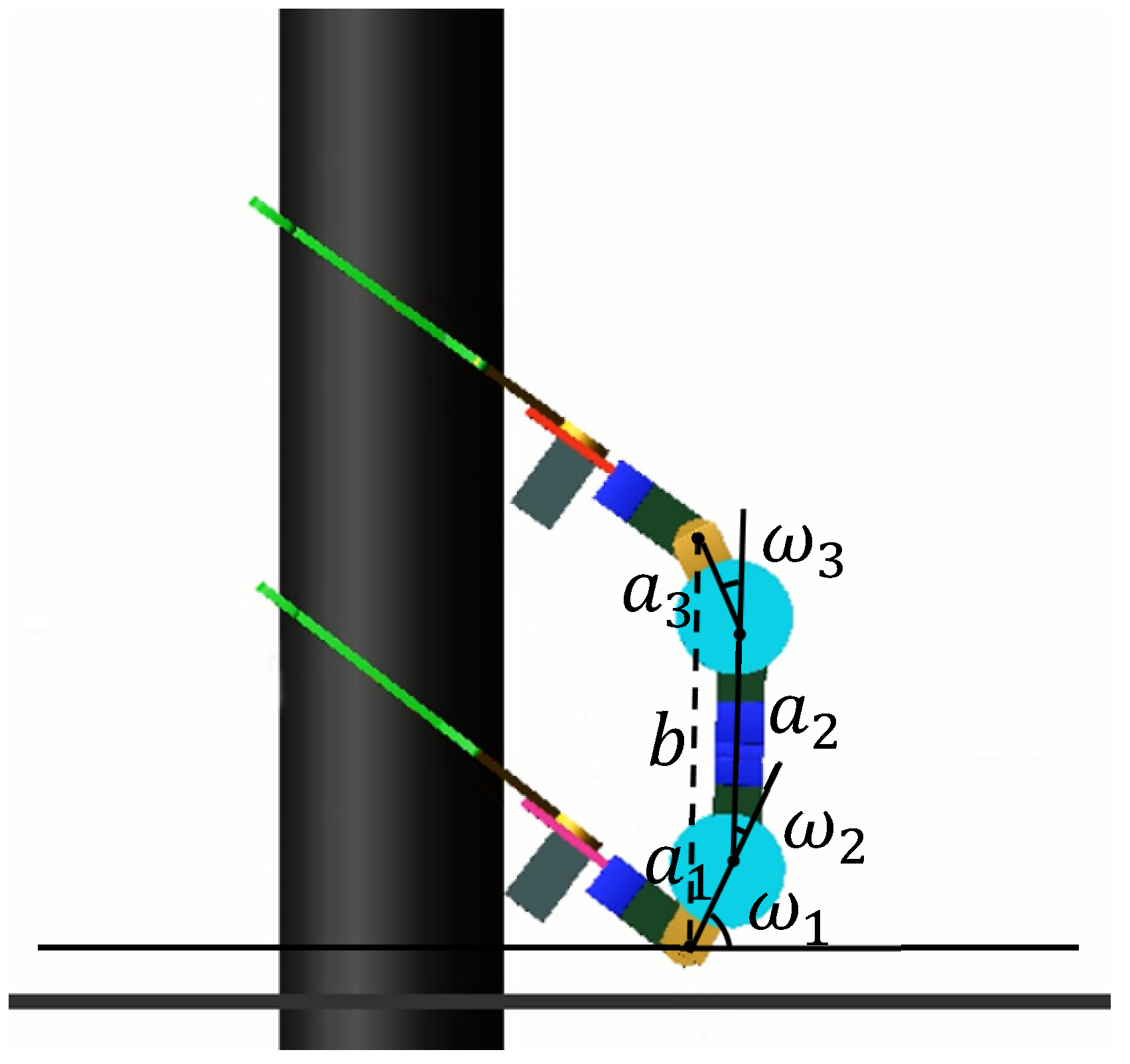
According to the structure size of the WL_PCR (see
Table 3) and the selected trunk diameter,
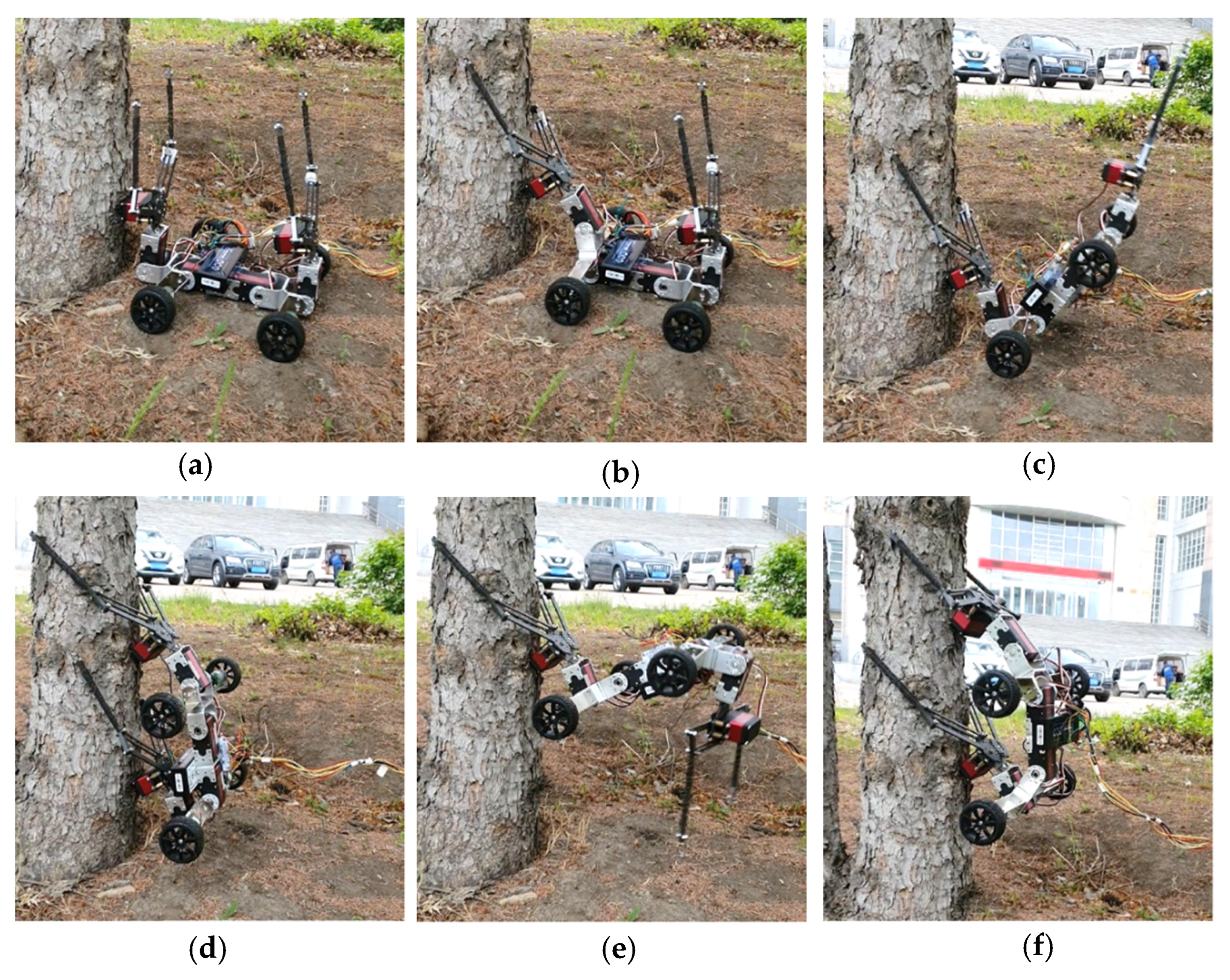
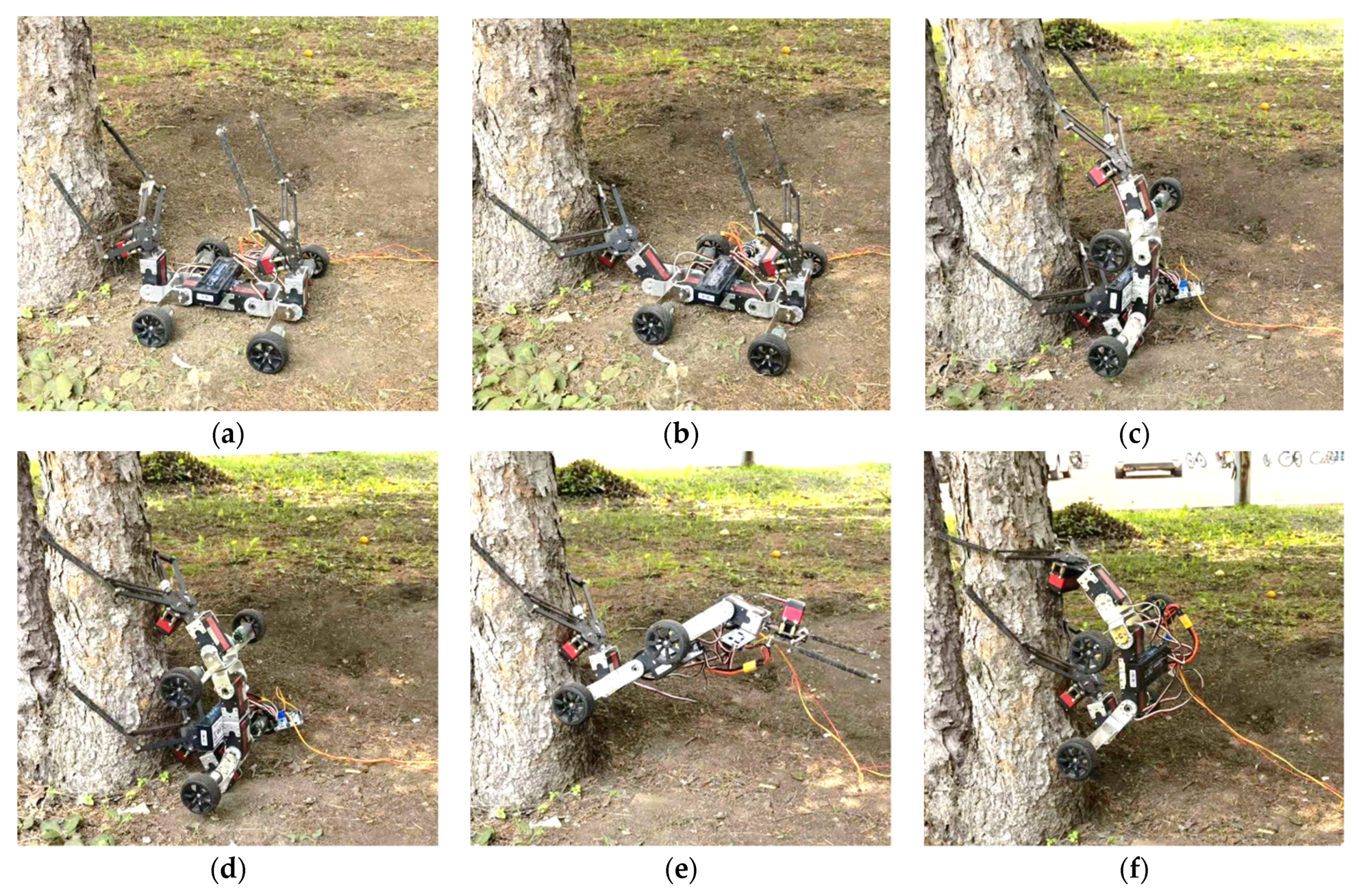
48°. By executing the first set of control parameters, the WL_PCR’s gait execution results are illustrated in
Figure 13. The WL_PCR completes the actions of stage 1, stage 2 and stage 3 according to the predetermined plan. The WL_PCR has no touch with the ground and completes the flip action smoothly.
By executing the second set of control parameters, the WL_PCR ‘s gait execution results are illustrated in
Figure 14. The WL_PCR completes stage 1 and stage 2 according to the predetermined plan. However, in stage 3, the WL_PCR’s body is blocked by the ground and fails to complete the scheduled action.
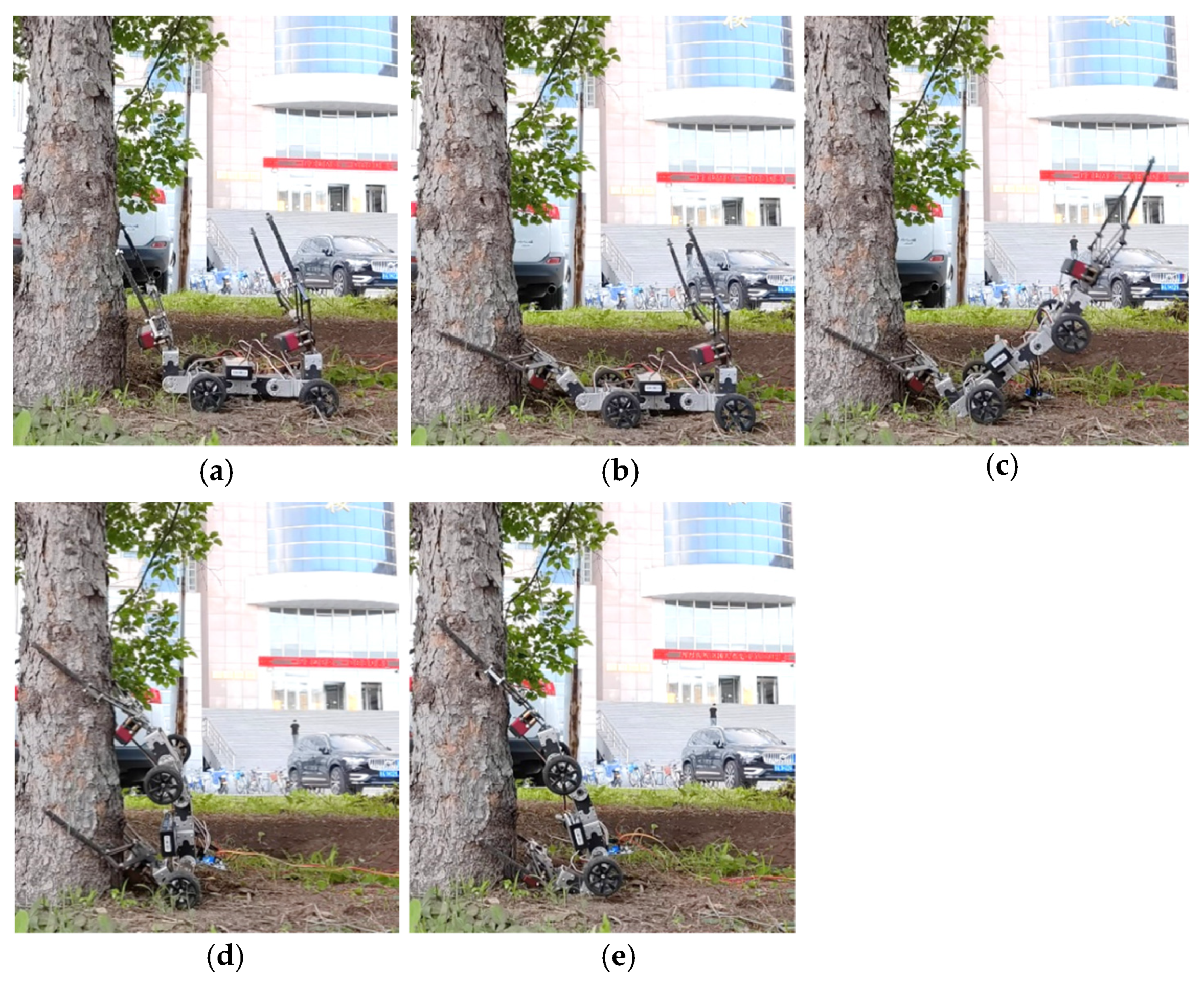
By executing the third set of control parameters, the WL_PCR ‘s gait execution results are illustrated in
Figure 15. The robot can complete the actions of stage 1, stage 2 and stage 3 according to the predetermined plan. In the third stage, the tip of the gripper of the robot skims over the ground. Under this limit condition, the WL_PCR completes the third stage of the turning action.
5. Conclusions
In this study, we designed and manufactured the WL_PCR based on the original PCR [
10,
26]. The WL_PCR is composed of the original PCR’s leg structure and the wheel structure. It can be moved on the ground through the wheel structure and on the pole through the leg structure.
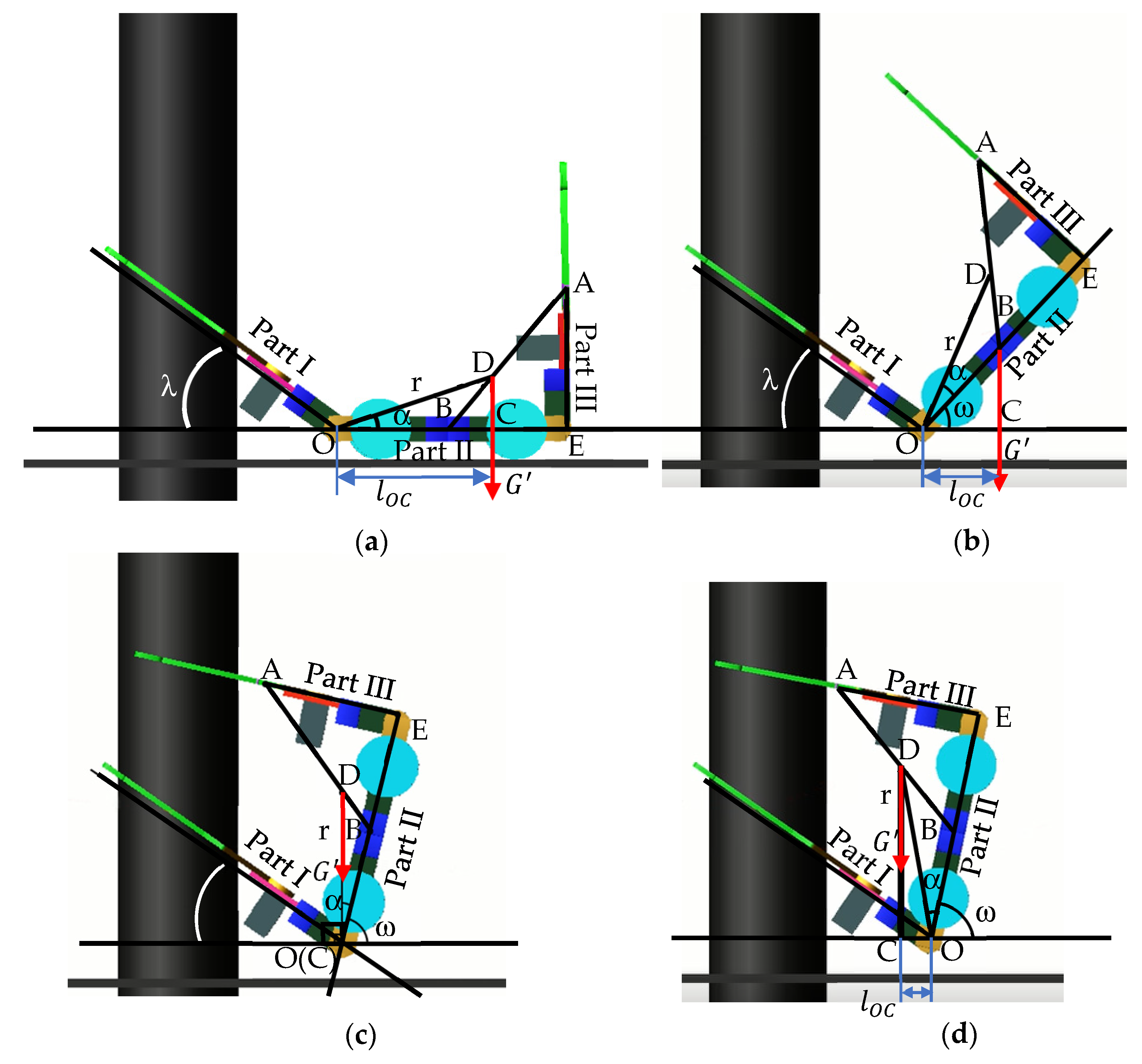
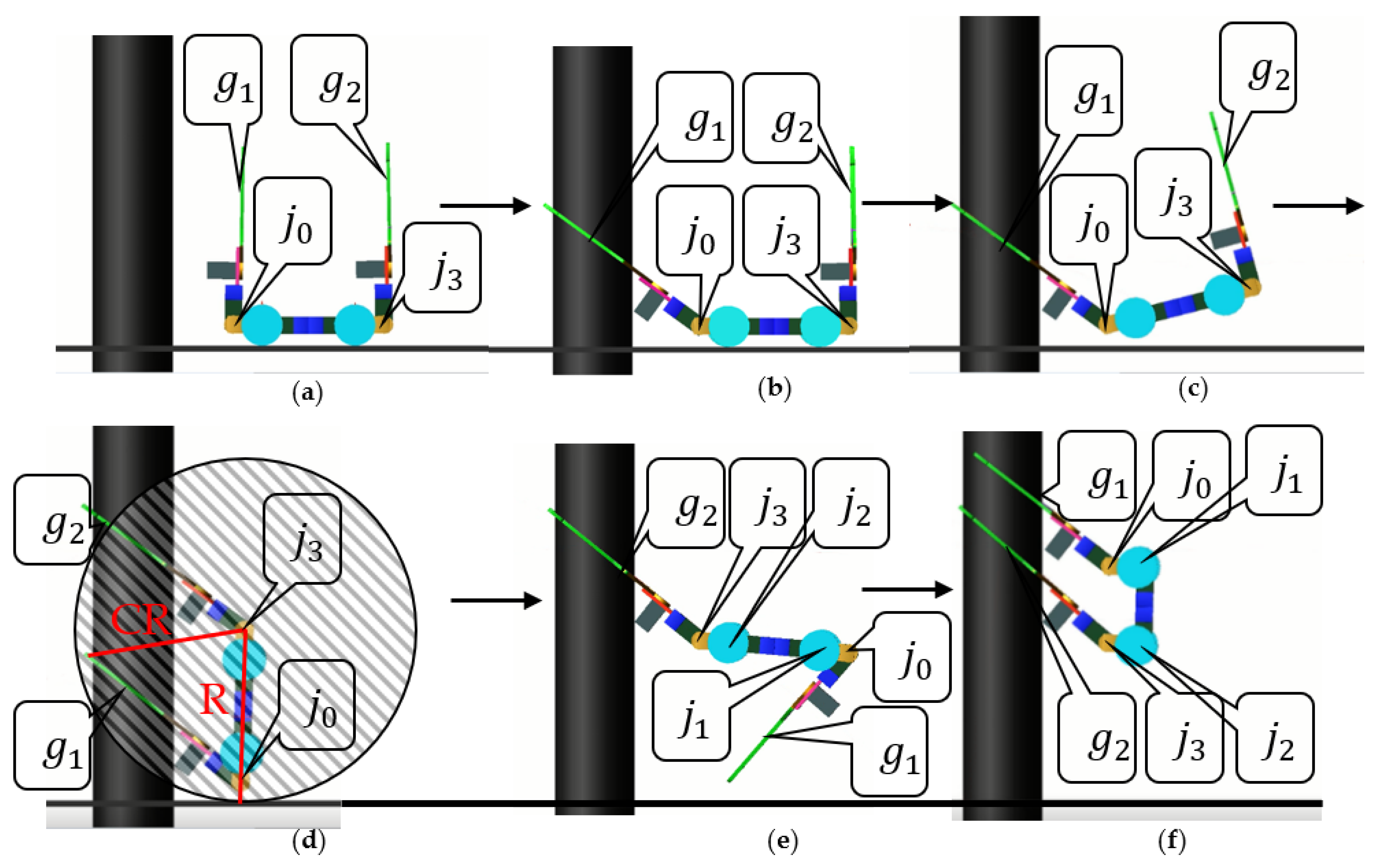
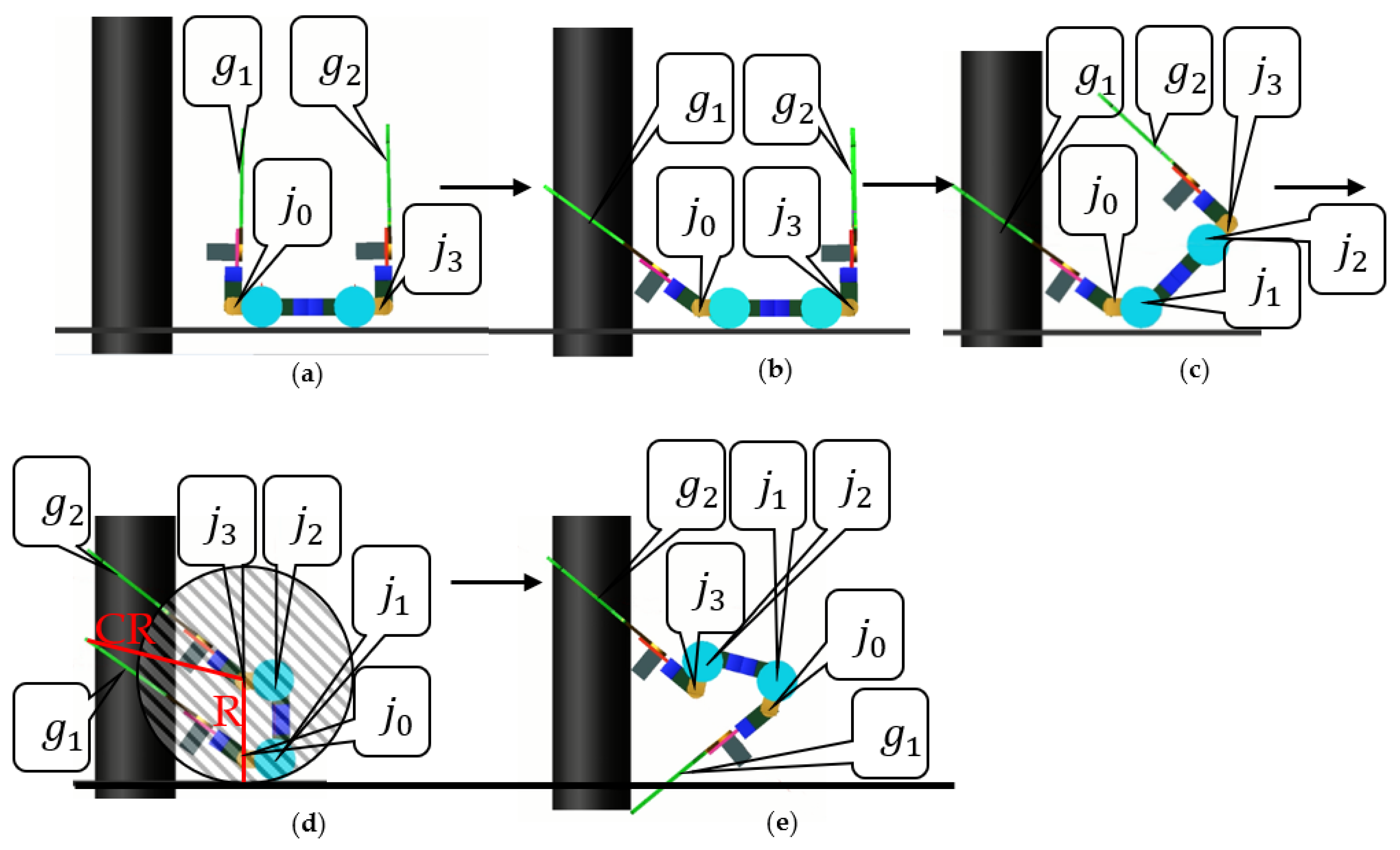
The WL_PCR can perform four gaits: traveling on the ground, climbing on a pole, transiting from the ground to the pole and transiting from the pole to the ground. This paper studies the transiting from the ground to the pole. We study the force analysis of WL_PCR and motion planning during the transition process. By analyzing the force of static and dynamic processes in the ground-to-pole transition, the condition of the joint providing force to the WL_PCR is proposed. The motion planning of the WL_PCR is analyzed by the flipping scheme, which provides joints for the WL_PCR to complete the ground-to-pole motion smoothly.
The experimental verification of the transition posture determination conditions proposed in this paper is confirmed. The average time to complete the whole transition is 14 s, the maximum climbing height is 26.0 cm and the minimum climbing height is 24.5 cm in the transition.
The transition process of the robot from the ground to the climbing pole is an important part of the unmanned detection system of the climbing pole robot, which can reduce the workload of the operator in the dangerous environment and avoid harming the environment and people. This research will be helpful in the application of climbing robots for pipeline inspections in dangerous environments, such as inspecting leakages in nuclear pipelines.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}