

Gecko-Inspired Adhesive Mechanisms and Adhesives for Robots—A Review



Abstract
:1. Introduction
2. Adhesion Mechanisms of Some Climbing Robots and Gecko-Inspired Robots
2.1. Dry Fibrillary Adhesion
- It could stick on surfaces with varying roughness from micrometer to centimeter scale;
- It could attach and detach from surfaces easily by controlling tangential forces during directional adhesion;
- It employed force control, which functioned with body compliance along with the oriented adhesive to regulate tangential forces of the foot.
2.2. Elastomeric Adhesion
2.3. Electrostatic Adhesion
2.4. Thermoplastic Adhesion
3. Factors Affecting Gecko Toe Adhesion
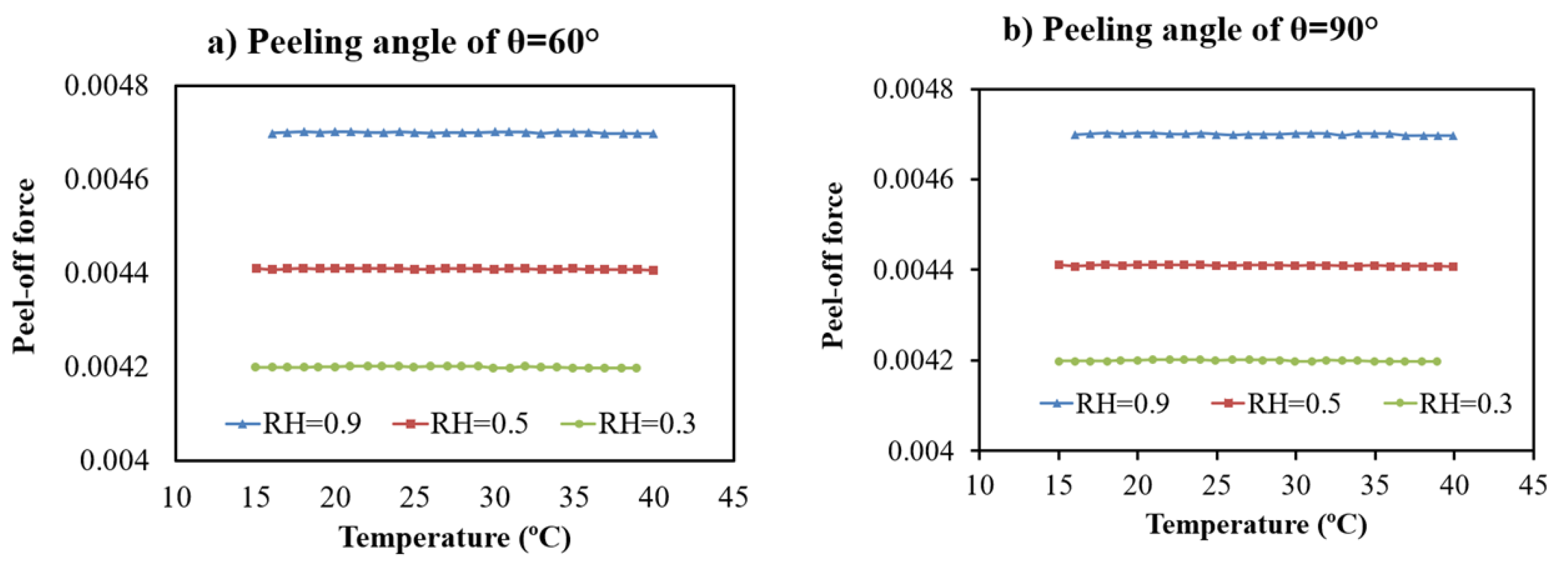
3.1. Influence of Temperature and Humidity on Gecko Toe Adhesion
3.2. Importance of Surface Roughness on Gecko Adhesion
4. Gecko-Inspired Adhesives and Related Fabrication Processes
4.1. Conventional Fabrication Methods
4.2. Advanced Fabrication Methods
5. Recent Progress of Gecko-Based Adhesives and Fabrication Techniques
5.1. Progress of Switchable Gecko-Inspired Synthetic Adhesives
5.2. Progress on Shape-Memory-Property-Inspired Adhesives
5.3. Progress on Miscellaneous Fabrication Techniques
6. On the Future Direction of Materials and Processes
7. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PU | Polyurethane |
| DPS | Directional polymer stacks |
| PET | Polyethylene terephthalate |
| PEN | Polyethylenenaphthalate |
| PPS | Polyphenylene sulfide |
| PI | Polyimide |
| SEBS | Styrene–ethylene/butylene–styrene |
| TPE | Thermoplastic elastomer |
| V-10 | Vytaflex-10 |
| PDMS | Polydimethylsiloxane |
| CPL | Conventional photolithograph |
| CFL | Capillary force lithography |
| PVDF | Polyvinylidene fluoride |
| PTFE | Polytetrafluoroethylene |
| TBCP | Timing-belt-based climbing platform |
| PSA | Pressure-sensitive adhesive |
| PMMA | Polymethyl methacrylate |
| ABS | Acrylonitrile butadiene styrene |
| CNT | Carbon nanotube |
| XPS | X-ray photoelectron spectroscopy |
| LDPE | Low-density polyethylene |
| RH | Relative humidity |
| AFM | Atomic force microscopy |
| PVC | Polyvinyl Chloride |
| SMP | Shape memory polymer |
| SMA | Shape memory alloy |
| PSS | Pressure switchable system |
| REM | Replica molding |
| AAO | Anodic aluminum oxide |
| SEM | Scanning electron microscopy |
References
- Federle, W.; Barnes, W.; Baumgartner, W.; Drechsler, P.; Smith, J. Wet but not slippery: Boundary friction in tree frog adhesive toe pads. J. R. Soc. Interface 2006, 3, 689–697. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Opell, B.D. The material cost and stickiness of capture threads and the evolution of orb-weaving spiders. Biol. J. Linn. Soc. 1997, 62, 443–458. [Google Scholar] [CrossRef]
- Russell, A.; Bels, V. Biomechanics and kinematics of limb-based locomotion in lizards: Review, synthesis and prospectus. Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 2001, 131, 89–112. [Google Scholar] [CrossRef] [PubMed]
- Vincent, J.F.; Bogatyreva, O.A.; Bogatyrev, N.R.; Bowyer, A.; Pahl, A.-K. Biomimetics: Its practice and theory. J. R. Soc. Interface 2006, 3, 471–482. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681. [Google Scholar] [CrossRef]
- Autumn, K.; Hsieh, S.; Dudek, D.; Chen, J.; Chitaphan, C.; Full, R. Dynamics of geckos running vertically. J. Exp. Biol. 2006, 209, 260–272. [Google Scholar] [CrossRef] [Green Version]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M. Frictional adhesion: A new angle on gecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef] [Green Version]
- Autumn, K.; Majidi, C.; Groff, R.; Dittmore, A.; Fearing, R. Effective elastic modulus of isolated gecko setal arrays. J. Exp. Biol. 2006, 209, 3558–3568. [Google Scholar] [CrossRef] [Green Version]
- Kasar, A.K.; Ramachandran, R.; Menezes, P.L. Natural Adhesion System Leads to Synthetic Adhesives. J. Bio-Tribo-Corros. 2018, 4, 43. [Google Scholar] [CrossRef]
- Russell, A.P. Integrative Functional Morphology of the Gekkotan Adhesive System (Reptilia: Gekkota). Integr. Comp. Biol. 2002, 42, 1154–1163. [Google Scholar] [CrossRef]
- Autumn, K. Biological Adhesives; Springer: Berlin/Heidelberg, Germany, 2006; pp. 225–255. [Google Scholar]
- Autumn, K.; Puthoff, J. Properties, Principles, and Parameters of the Gecko Adhesive System. In Biological Adhesives; Springer: Berlin/Heidelberg, Germany, 2016; pp. 245–280. [Google Scholar]
- Prowse, M.S.; Wilkinson, M.; Puthoff, J.B.; Mayer, G.; Autumn, K. Effects of humidity on the mechanical properties of gecko setae. Acta Biomater. 2011, 7, 733–738. [Google Scholar] [CrossRef] [PubMed]
- Pesika, N.S.; Zeng, H.; Kristiansen, K.; Zhao, B.; Tian, Y.; Autumn, K.; Israelachvili, J. Gecko adhesion pad: A smart surface? J. Phys. Condens. Matter 2009, 21, 464132. [Google Scholar] [CrossRef] [PubMed]
- Stark, A.Y.; Mitchell, C.T. Stick or slip: Adhesive performance of geckos and gecko-inspired synthetics in wet environments. Integr. Comp. Biol. 2019, 59, 214–226. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Pesika, N.S.; Turner, K.L.; Israelachvili, J.N. Gecko-inspired dry adhesive for robotic applications. Adv. Funct. Mater. 2011, 21, 3010–3018. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. A shape memory alloy-actuated gecko-inspired robotic gripper. Sens. Actuators A Phys. 2018, 276, 76–82. [Google Scholar] [CrossRef]
- Ruffatto, D.; Glick, P.E.; Tolley, M.T.; Parness, A. Long-duration surface anchoring with a hybrid electrostatic and gecko-inspired adhesive. IEEE Robot. Autom. Lett. 2018, 3, 4201–4208. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kute, C.; Mengüç, Y.; Sitti, M. Waalbot II: Adhesion recovery and improved performance of a climbing robot using fibrillar adhesives. Int. J. Robot. Res. 2011, 30, 118–133. [Google Scholar] [CrossRef]
- Jiang, H.; Hawkes, E.W.; Fuller, C.; Estrada, M.A.; Suresh, S.A.; Abcouwer, N.; Han, A.K.; Wang, S.; Ploch, C.J.; Parness, A. A robotic device using gecko-inspired adhesives can grasp and manipulate large objects in microgravity. Sci. Robot. 2017, 2, eaan4545. [Google Scholar] [CrossRef] [Green Version]
- Tao, D.; Gao, X.; Lu, H.; Liu, Z.; Li, Y.; Tong, H.; Pesika, N.; Meng, Y.; Tian, Y. Controllable anisotropic dry adhesion in vacuum: Gecko inspired wedged surface fabricated with ultraprecision diamond cutting. Adv. Funct. Mater. 2017, 27, 1606576. [Google Scholar] [CrossRef]
- Silva, M.F.; Machado, J.T.; Tar, J.K. A survey of technologies for climbing robots adhesion to surfaces. In Proceedings of the 2008 IEEE International Conference on Computational Cybernetics, Stara Lesna, Slovakia, 27–29 November 2008; IEEE: New York, NY, USA, 2008; pp. 127–132. [Google Scholar]
- Menon, C.; Murphy, M.; Sitti, M. Gecko inspired surface climbing robots. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; IEEE: New York, NY, USA, 2004; pp. 431–436. [Google Scholar]
- Asbeck, A.T.; Kim, S.; McClung, A.; Parness, A.; Cutkosky, M.R. Climbing Walls with Microspines. In Robotics and Automation Society; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Park, S.; Jeong, H.D.; Lim, Z.S. Design of a mobile robot system for automatic integrity evaluation of large size reservoirs and pipelines in industrial fields. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), Las Vegas, NV, USA, 27 October–1 November 2003; IEEE: New York, NY, USA, 2003; pp. 2618–2623. [Google Scholar]
- Shen, W.; Gu, J.; Shen, Y. Permanent magnetic system design for the wall-climbing robot. Appl. Bionics Biomech. 2006, 3, 151–159. [Google Scholar] [CrossRef]
- Shores, B.E.; Minor, M.A. Design, kinematic analysis, and quasi-steady control of a morphic rolling disk biped climbing robot. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: New York, NY, USA, 2005; pp. 2721–2726. [Google Scholar]
- Krahn, J.; Liu, Y.; Sadeghi, A.; Menon, C. A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps. Smart Mater. Struct. 2011, 20, 115021. [Google Scholar] [CrossRef]
- Daltorio, K.A.; Horchler, A.D.; Gorb, S.; Ritzmann, R.E.; Quinn, R.D. A small wall-walking robot with compliant, adhesive feet. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; IEEE: New York, NY, USA, 2005; pp. 3648–3653. [Google Scholar]
- Unver, O.; Murphy, M.; Sitti, M. Geckobot and Waalbot: Small-Scale Wall Climbing Robots; Infotech@Aerospace: Arlington, Virginia, 2005; p. 6940. [Google Scholar]
- Peressadko, A.; Gorb, S.N. When less is more: Experimental evidence for tenacity enhancement by division of contact area. J. Adhes. 2004, 80, 247–261. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 2005, 37, 275–285. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Eason, E.V.; Asbeck, A.T.; Cutkosky, M.R. The gecko’s toe: Scaling directional adhesives for climbing applications. IEEE/ASME Trans. Mechatron. 2012, 18, 518–526. [Google Scholar] [CrossRef]
- Persson, B.; Gorb, S. The effect of surface roughness on the adhesion of elastic plates with application to biological systems. J. Chem. Phys. 2003, 119, 11437–11444. [Google Scholar] [CrossRef] [Green Version]
- Unver, O.; Sitti, M. Tankbot: A palm-size, tank-like climbing robot using soft elastomer adhesive treads. Int. J. Robot. Res. 2010, 29, 1761–1777. [Google Scholar] [CrossRef]
- Callow, M.E.; Fletcher, R.L. The influence of low surface energy materials on bioadhesion—A review. Int. Biodeterior. Biodegrad. 1994, 34, 333–348. [Google Scholar] [CrossRef]
- Wolf, M.P.; Salieb-Beugelaar, G.B.; Hunziker, P. PDMS with designer functionalities—Properties, modifications strategies, and applications. Prog. Polym. Sci. 2018, 83, 97–134. [Google Scholar] [CrossRef]
- Simaite, A.; Spenko, M. Evaluation of silicone elastomers as structural materials for microstructured adhesives. Bioinspir. Biomim. 2019, 14, 046005. [Google Scholar] [CrossRef]
- Chen, R. A gecko-inspired electroadhesive wall-climbing robot. IEEE Potentials 2015, 34, 15–19. [Google Scholar] [CrossRef]
- Asano, K.; Hatakeyama, F.; Yatsuzuka, K. Fundamental study of an electrostatic chuck for silicon wafer handling. IEEE Trans. Ind. Appl. 2002, 38, 840–845. [Google Scholar] [CrossRef]
- Prahlad, H.; Pelrine, R.; Stanford, S.; Marlow, J.; Kornbluh, R. Electroadhesive robots—Wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: New York, NY, USA, 2008; pp. 3028–3033. [Google Scholar]
- Dadkhah, M.; Ruffatto, D., III; Zhao, Z.; Spenko, M. Increasing adhesion via a new electrode design and improved manufacturing in electrostatic/microstructured adhesives. J. Electrost. 2018, 91, 48–55. [Google Scholar] [CrossRef]
- Ruffatto, D., III; Shah, J.; Spenko, M. Increasing the adhesion force of electrostatic adhesives using optimized electrode geometry and a novel manufacturing process. J. Electrost. 2014, 72, 147–155. [Google Scholar] [CrossRef]
- Khaled, W.B.; Sameoto, D. Fabrication and characterization of thermoplastic elastomer dry adhesives with high strength and low contamination. ACS Appl. Mater. Interfaces 2014, 6, 6806–6815. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Chung, Y.; Tsao, A.; Maboudian, R. Tuning micropillar tapering for optimal friction performance of thermoplastic gecko-inspired adhesive. ACS Appl. Mater. Interfaces 2014, 6, 6936–6943. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, C.T.; Yang, S. Fabrication of hierarchical pillar arrays from thermoplastic and photosensitive SU-8. Small 2010, 6, 768–775. [Google Scholar] [CrossRef]
- Bhushan, B. Encyclopedia of Nanotechnology; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Li, X.; Tao, D.; Lu, H.; Bai, P.; Liu, Z.; Ma, L.; Meng, Y.; Tian, Y. Recent developments in gecko-inspired dry adhesive surfaces from fabrication to application. Surf. Topogr. Metrol. Prop. 2019, 7, 023001. [Google Scholar] [CrossRef]
- Israelachvili, J. Intermolecular and Surface Forces, 2nd ed.; Academic: New York, NY, USA, 1992. [Google Scholar]
- Jeong, H.E.; Suh, K.Y. Nanohairs and nanotubes: Efficient structural elements for gecko-inspired artificial dry adhesives. Nano Today 2009, 4, 335–346. [Google Scholar] [CrossRef]
- Arzt, E.; Gorb, S.; Spolenak, R. From micro to nano contacts in biological attachment devices. Proc. Natl. Acad. Sci. USA 2003, 100, 10603–10606. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Sitti, M. Biologically inspired polymer microfibers with spatulate tips as repeatable fibrillar adhesives. Appl. Phys. Lett. 2006, 89, 261911. [Google Scholar] [CrossRef]
- Bartlett, M.D.; Croll, A.B.; King, D.R.; Paret, B.M.; Irschick, D.J.; Crosby, A.J. Looking beyond fibrillar features to scale gecko-like adhesion. Adv. Mater. 2012, 24, 1078–1083. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Ulmen, J.; Esparza, N.; Cutkosky, M.R. Scaling walls: Applying dry adhesives to the real world. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: New York, NY, USA, 2011; pp. 5100–5106. [Google Scholar]
- Murphy, M.P.; Sitti, M. Waalbot: An agile small-scale wall-climbing robot utilizing dry elastomer adhesives. IEEE/ASME Trans. Mechatron. 2007, 12, 330–338. [Google Scholar] [CrossRef]
- Ebnesajjad, S. Characteristics of Adhesive Materials. In Handbook of Adhesives and Surface Preparation; Elsevier: Amsterdam, The Netherlands, 2011; pp. 137–183. [Google Scholar]
- Unver, O.; Sitti, M. Flat dry elastomer adhesives as attachment materials for climbing robots. IEEE Trans. Robot. 2009, 26, 131–141. [Google Scholar] [CrossRef]
- Glass, P.; Chung, H.; Washburn, N.R.; Sitti, M. Enhanced reversible adhesion of dopamine methacrylamide-coated elastomer microfibrillar structures under wet conditions. Langmuir 2009, 25, 6607–6612. [Google Scholar] [CrossRef] [PubMed]
- Tang, T.; Hui, C.-Y.; Glassmaker, N.J. Can a fibrillar interface be stronger and tougher than a non-fibrillar one? J. R. Soc. Interface 2005, 2, 505–516. [Google Scholar] [CrossRef] [Green Version]
- Gay, C. Stickiness—Some fundamentals of adhesion. Integr. Comp. Biol. 2002, 42, 1123–1126. [Google Scholar] [CrossRef]
- Persson, B.; Tosatti, E. The effect of surface roughness on the adhesion of elastic solids. J. Chem. Phys. 2001, 115, 5597–5610. [Google Scholar] [CrossRef] [Green Version]
- Sitti, M.; Fearing, R.S. Synthetic gecko foot-hair micro/nano-structures as dry adhesives. J. Adhes. Sci. Technol. 2003, 17, 1055–1073. [Google Scholar] [CrossRef] [Green Version]
- Hansen, W.R.; Autumn, K. Evidence for self-cleaning in gecko setae. Proc. Natl. Acad. Sci. USA 2005, 102, 385–389. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Fearing, R.S. Contact Self-Cleaning of Synthetic Gecko Adhesive from Polymer Microfibers. Langmuir 2008, 24, 10587–10591. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Cheung, E.; Sitti, M. Wet self-cleaning of biologically inspired elastomer mushroom shaped microfibrillar adhesives. Langmuir 2009, 25, 7196–7199. [Google Scholar] [CrossRef] [PubMed]
- Akhtar, M.N.; Itani, R.Y. Predicting damping of semi-rigid glued T-beams. Wood Fiber Sci. 2007, 19, 26–36. [Google Scholar]
- Monkman, G. Electroadhesive microgrippers. Ind. Robot. Int. J. 2003, 30, 326–330. [Google Scholar] [CrossRef]
- Monkman, G.J. An analysis of astrictive prehension. Int. J. Robot. Res. 1997, 16, 1–10. [Google Scholar] [CrossRef]
- Ruffatto, D.; Shah, J.; Spenko, M. Optimization and experimental validation of electrostatic adhesive geometry. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; IEEE: New York, NY, USA, 2013; pp. 1–8. [Google Scholar]
- Berengueres, J.; Urago, M.; Saito, S.; Tadakuma, K.; Meguro, H. Gecko inspired electrostatic chuck. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; IEEE: New York, NY, USA, 2006; pp. 1018–1023. [Google Scholar]
- Krahn, J.; Menon, C. Electro-dry-adhesion. Langmuir 2012, 28, 5438–5443. [Google Scholar] [CrossRef] [PubMed]
- Ruffatto, D., III; Parness, A.; Spenko, M. Improving controllable adhesion on both rough and smooth surfaces with a hybrid electrostatic/gecko-like adhesive. J. R. Soc. Interface 2014, 11, 20131089. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Wang, Z.; Li, Y.; Dai, Z. Electrostatic attraction caused by triboelectrification in climbing geckos. Friction 2022, 10, 44–53. [Google Scholar] [CrossRef]
- Belingardi, G.; Brunella, V.; Martorana, B.; Ciardiello, R. Thermoplastic Adhesive for Automotive Applications; Intech: Rijeka, Croatia, 2016; Volume 1. [Google Scholar]
- Kwak, M.K.; Jeong, H.E.; Bae, W.G.; Jung, H.S.; Suh, K.Y. Anisotropic adhesion properties of triangular-tip-shaped micropillars. Small 2011, 7, 2296–2300. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Direct molding of dry adhesives with anisotropic peel strength using an offset lift-off photoresist mold. J. Micromech. Microeng. 2009, 19, 115026. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.; Fearing, R.S.; Maboudian, R. Effect of fiber geometry on macroscale friction of ordered low-density polyethylene nanofiber arrays. Langmuir 2011, 27, 11008–11016. [Google Scholar] [CrossRef] [PubMed]
- Greiner, C.; del Campo, A.; Arzt, E. Adhesion of bioinspired micropatterned surfaces: Effects of pillar radius, aspect ratio, and preload. Langmuir 2007, 23, 3495–3502. [Google Scholar] [CrossRef] [PubMed]
- Aksak, B.; Murphy, M.P.; Sitti, M. Adhesion of biologically inspired vertical and angled polymer microfiber arrays. Langmuir 2007, 23, 3322–3332. [Google Scholar] [CrossRef]
- Lee, J.; Fearing, R.S.; Komvopoulos, K. Directional adhesion of gecko-inspired angled microfiber arrays. Appl. Phys. Lett. 2008, 93, 191910. [Google Scholar] [CrossRef] [Green Version]
- del Campo, A.; Greiner, C.; Alvarez, I.; Arzt, E. Patterned surfaces with pillars with controlled 3D tip geometry mimicking bioattachment devices. Adv. Mater. 2007, 19, 1973–1977. [Google Scholar] [CrossRef]
- Murphy, M.P.; Aksak, B.; Sitti, M. Gecko-inspired directional and controllable adhesion. Small 2009, 5, 170–175. [Google Scholar] [CrossRef]
- Greiner, C.; Arzt, E.; Del Campo, A. Hierarchical gecko-like adhesives. Adv. Mater. 2009, 21, 479–482. [Google Scholar] [CrossRef]
- Zhang, P.; Liu, S.; Lv, H. Fabrication and Properties of Dual-Level Hierarchical Structures Mimicking Gecko Foot Hairs. J. Nanosci. Nanotechnol. 2013, 13, 781–786. [Google Scholar] [CrossRef] [Green Version]
- Boesel, L.F.; Greiner, C.; Arzt, E.; Del Campo, A. Gecko-inspired surfaces: A path to strong and reversible dry adhesives. Adv. Mater. 2010, 22, 2125–2137. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Recent advances in the fabrication and adhesion testing of biomimetic dry adhesives. Smart Mater. Struct. 2010, 19, 103001. [Google Scholar] [CrossRef]
- Hoang, T.T.; Quek, J.J.S.; Thai, M.T.; Phan, P.T.; Lovell, N.H.; Do, T.N. Soft robotic fabric gripper with gecko adhesion and variable stiffness. Sens. Actuators A Phys. 2021, 323, 112673. [Google Scholar] [CrossRef]
- Bergmann, P.J.; Irschick, D.J. Effects of temperature on maximum clinging ability in a diurnal gecko: Evidence for a passive clinging mechanism? J. Exp. Zool. Part A Comp. Exp. Biol. 2005, 303, 785–791. [Google Scholar] [CrossRef] [PubMed]
- Niewiarowski, P.H.; Lopez, S.; Ge, L.; Hagan, E.; Dhinojwala, A. Sticky gecko feet: The role of temperature and humidity. PLoS ONE 2008, 3, e2192. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Yang, Y.; Chen, S. Coupled effects of the temperature and the relative humidity on gecko adhesion. J. Phys. D Appl. Phys. 2017, 50, 315402. [Google Scholar] [CrossRef]
- Niewiarowski, P.H.; Stark, A.Y.; Dhinojwala, A. Sticking to the story: Outstanding challenges in gecko-inspired adhesives. J. Exp. Biol. 2016, 219, 912–919. [Google Scholar] [CrossRef] [Green Version]
- Stark, A.Y.; Klittich, M.R.; Sitti, M.; Niewiarowski, P.H.; Dhinojwala, A. The effect of temperature and humidity on adhesion of a gecko-inspired adhesive: Implications for the natural system. Sci. Rep. 2016, 6, 30936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shuttleworth, I. On the role of the van der Waals interaction in gecko adhesion: A DFT perspective. Results Mater. 2020, 6, 100080. [Google Scholar] [CrossRef]
- Izadi, H.; Stewart, K.M.; Penlidis, A. Role of contact electrification and electrostatic interactions in gecko adhesion. J. R. Soc. Interface 2014, 11, 20140371. [Google Scholar] [CrossRef] [Green Version]
- Badge, I.; Stark, A.Y.; Paoloni, E.L.; Niewiarowski, P.H.; Dhinojwala, A. The role of surface chemistry in adhesion and wetting of gecko toe pads. Sci. Rep. 2014, 4, 6643. [Google Scholar] [CrossRef] [Green Version]
- Huber, G.; Mantz, H.; Spolenak, R.; Mecke, K.; Jacobs, K.; Gorb, S.N.; Arzt, E. Evidence for capillarity contributions to gecko adhesion from single spatula nanomechanical measurements. Proc. Natl. Acad. Sci. USA 2005, 102, 16293–16296. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Neuzil, P.; Kustandi, T.S.; Oh, S.; Samper, V.D. The nature of the gecko lizard adhesive force. Biophys. J. 2005, 89, L14–L17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Puthoff, J.B.; Prowse, M.S.; Wilkinson, M.; Autumn, K. Changes in materials properties explain the effects of humidity on gecko adhesion. J. Exp. Biol. 2010, 213, 3699–3704. [Google Scholar] [CrossRef] [PubMed]
- Tan, D.; Luo, A.; Wang, X.; Shi, Z.; Lei, Y.; Steinhart, M.; Kovalev, A.; Gorb, S.N.; Turner, K.T.; Xue, L. Humidity-modulated core–shell nanopillars for enhancement of gecko-inspired adhesion. ACS Appl. Nano Mater. 2020, 3, 3596–3603. [Google Scholar] [CrossRef]
- Leckband, D.; Chen, Y.L.; Israelachvili, J.; Wickman, H.H.; Fletcher, M.; Zimmerman, R. Measurements of conformational changes during adhesion of lipid and protein (polylysine and S-layer) surfaces. Biotechnol. Bioeng. 1993, 42, 167–177. [Google Scholar] [CrossRef]
- Huber, G.; Gorb, S.N.; Hosoda, N.; Spolenak, R.; Arzt, E. Influence of surface roughness on gecko adhesion. Acta Biomater. 2007, 3, 607–610. [Google Scholar] [CrossRef]
- Fuller, K.; Tabor, D. The effect of surface roughness on the adhesion of elastic solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 1975, 345, 327–342. [Google Scholar]
- Peressadko, A.; Hosoda, N.; Persson, B. Influence of surface roughness on adhesion between elastic bodies. Phys. Rev. Lett. 2005, 95, 124301. [Google Scholar] [CrossRef] [Green Version]
- Persson, B. On the mechanism of adhesion in biological systems. J. Chem. Phys. 2003, 118, 7614–7621. [Google Scholar] [CrossRef] [Green Version]
- Niewiarowski, P.H.; Dhinojwala, A.; Garner, A.M. A physical model approach to gecko adhesion opportunity and constraint: How rough could it be? Integr. Comp. Biol. 2019, 59, 203–213. [Google Scholar] [CrossRef]
- Brodoceanu, D.; Bauer, C.; Kroner, E.; Arzt, E.; Kraus, T. Hierarchical bioinspired adhesive surfaces—A review. Bioinspiration Biomim. 2016, 11, 051001. [Google Scholar] [CrossRef]
- Ye, Z.; Lum, G.Z.; Song, S.; Rich, S.; Sitti, M. Phase change of gallium enables highly reversible and switchable adhesion. Adv. Mater. 2016, 28, 5088–5092. [Google Scholar] [CrossRef] [PubMed]
- Drotlef, D.M.; Amjadi, M.; Yunusa, M.; Sitti, M. Bioinspired composite microfibers for skin adhesion and signal amplification of wearable sensors. Adv. Mater. 2017, 29, 1701353. [Google Scholar] [CrossRef] [PubMed]
- Tan, D.; Wang, X.; Liu, Q.; Shi, K.; Yang, B.; Liu, S.; Wu, Z.S.; Xue, L. Switchable adhesion of micropillar adhesive on rough surfaces. Small 2019, 15, 1904248. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Sitti, M.; Liang, Y.A.; Peattie, A.M.; Hansen, W.R.; Sponberg, S.; Kenny, T.W.; Fearing, R.; Israelachvili, J.N.; Full, R.J. Evidence for van der Waals adhesion in gecko setae. Proc. Natl. Acad. Sci. USA 2002, 99, 12252–12256. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geim, A.K.; Dubonos, S.; Grigorieva, I.; Novoselov, K.; Zhukov, A.; Shapoval, S.Y. Microfabricated adhesive mimicking gecko foot-hair. Nat. Mater. 2003, 2, 461–463. [Google Scholar] [CrossRef]
- Gorb, S.; Varenberg, M.; Peressadko, A.; Tuma, J. Biomimetic mushroom-shaped fibrillar adhesive microstructure. J. R. Soc. Interface 2007, 4, 271–275. [Google Scholar] [CrossRef] [Green Version]
- Kwak, M.K.; Pang, C.; Jeong, H.E.; Kim, H.N.; Yoon, H.; Jung, H.S.; Suh, K.Y. Towards the next level of bioinspired dry adhesives: New designs and applications. Adv. Funct. Mater. 2011, 21, 3606–3616. [Google Scholar] [CrossRef]
- Yurdumakan, B.; Raravikar, N.R.; Ajayan, P.M.; Dhinojwala, A. Synthetic gecko foot-hairs from multiwalled carbon nanotubes. Chem. Commun. 2005, 3799–3801. [Google Scholar] [CrossRef]
- Jeong, H.E.; Lee, J.-K.; Kim, H.N.; Moon, S.H.; Suh, K.Y. A nontransferring dry adhesive with hierarchical polymer nanohairs. Proc. Natl. Acad. Sci. USA 2009, 106, 5639–5644. [Google Scholar] [CrossRef] [Green Version]
- Peattie, A.M.; Majidi, C.; Corder, A.; Full, R.J. Ancestrally high elastic modulus of gecko setal β-keratin. J. R. Soc. Interface 2007, 4, 1071–1076. [Google Scholar] [CrossRef] [Green Version]
- Spolenak, R.; Gorb, S.; Arzt, E. Adhesion design maps for bio-inspired attachment systems. Acta Biomater. 2005, 1, 5–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, M.; Zhao, A.; Jiang, R.; Wang, D.; Li, D.; Guo, H.; Tao, W.; Gan, Z.; Zhang, M. Regulation of the elastic modulus of polyurethane microarrays and its influence on gecko-inspired dry adhesion. Appl. Surf. Sci. 2011, 257, 3336–3340. [Google Scholar] [CrossRef]
- Del Campo, A.; Greiner, C.; Arzt, E. Contact shape controls adhesion of bioinspired fibrillar surfaces. Langmuir 2007, 23, 10235–10243. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.I.; Jeong, H.E.; Suh, K.Y.; Lee, H.H. Stooped nanohairs: Geometry-controllable, unidirectional, reversible, and robust gecko-like dry adhesive. Adv. Mater. 2009, 21, 2276–2281. [Google Scholar] [CrossRef]
- Micciché, M.; Arzt, E.; Kroner, E. Single macroscopic pillars as model system for bioinspired adhesives: Influence of tip dimension, aspect ratio, and tilt angle. ACS Appl. Mater. Interfaces 2014, 6, 7076–7083. [Google Scholar] [CrossRef]
- Carbone, G.; Pierro, E. Effect of interfacial air entrapment on the adhesion of bio-inspired mushroom-shaped micro-pillars. Soft Matter 2012, 8, 7904–7908. [Google Scholar] [CrossRef]
- Kang, O.H.; Lee, S.H.; Yun, J.H.; Yi, H.; Kwak, M.K.; Lee, S.R. Adhesion tunable bio-inspired dry adhesives by twisting. Int. J. Precis. Eng. Manuf. 2017, 18, 1433–1437. [Google Scholar] [CrossRef]
- Simaite, A.; Karimi, M.A.; Spenko, M. Crosslinker and catalyst as silicone elastomer bonding enhancers: Applications to fabrication of hybrid electrostatic/gecko-like adhesives. J. Micromechanics Microengineering 2019, 29, 077001. [Google Scholar] [CrossRef]
- Röhrig, M.; Thiel, M.; Worgull, M.; Hölscher, H. 3D direct laser writing of nano-and microstructured hierarchical gecko-mimicking surfaces. Small 2012, 8, 3009–3015. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kim, S.; Sitti, M. Enhanced adhesion by gecko-inspired hierarchical fibrillar adhesives. ACS Appl. Mater. Interfaces 2009, 1, 849–855. [Google Scholar] [CrossRef]
- Milionis, A.; Noyes, C.; Loth, E.; Bayer, I.; Lichtenberger, A.; Stathopoulos, V.; Vourdas, N. Water-repellent approaches for 3-D printed internal passages. Mater. Manuf. Process. 2016, 31, 1162–1170. [Google Scholar] [CrossRef]
- Feng, J.; Tuominen, M.T.; Rothstein, J.P. Hierarchical superhydrophobic surfaces fabricated by dual-scale electron-beam-lithography with well-ordered secondary nanostructures. Adv. Funct. Mater. 2011, 21, 3715–3722. [Google Scholar] [CrossRef]
- Davoudinejad, A.; Ribo, M.; Pedersen, D.; Islam, A.; Tosello, G. Direct fabrication of bio-inspired gecko-like geometries with vat polymerization additive manufacturing method. J. Micromechanics Microengineering 2018, 28, 085009. [Google Scholar] [CrossRef]
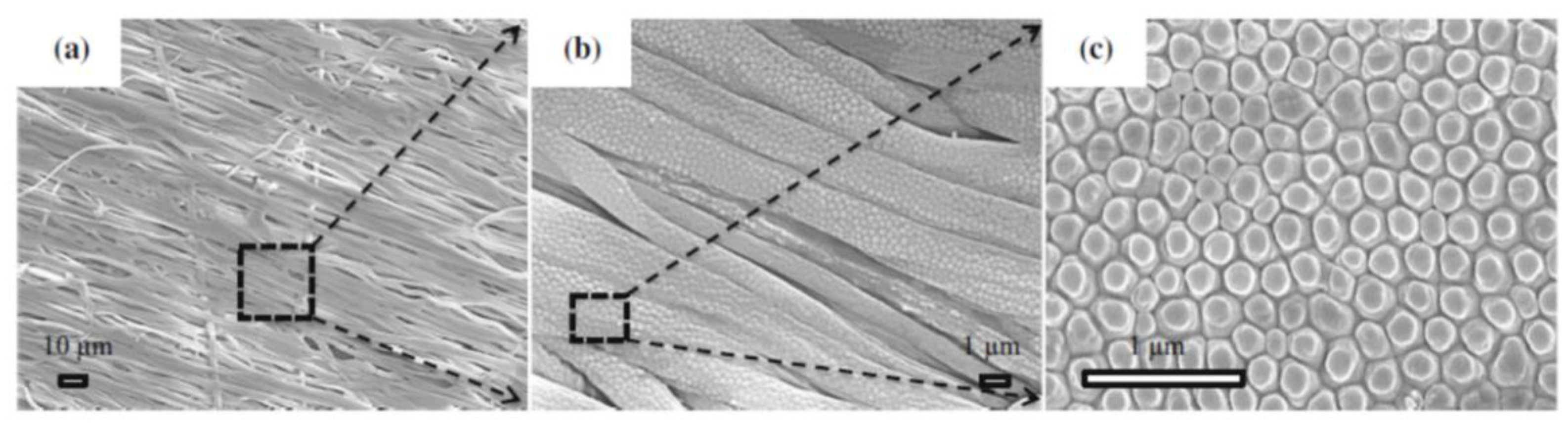
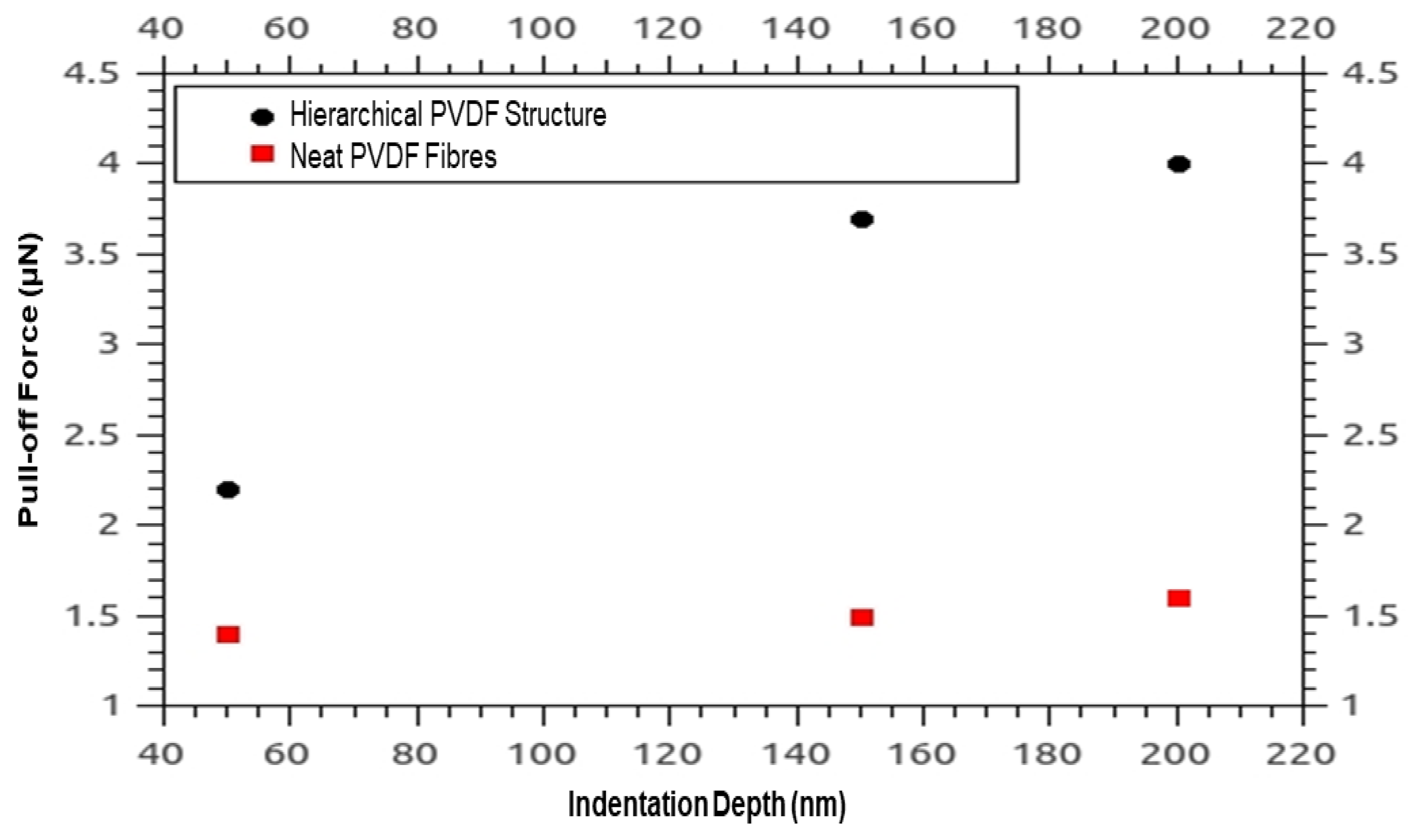
- Sahay, R.; Parveen, H.; Baji, A.; Ganesh, V.A.; Ranganath, A.S. Fabrication of PVDF hierarchical fibrillar structures using electrospinning for dry-adhesive applications. J. Mater. Sci. 2017, 52, 2435–2441. [Google Scholar] [CrossRef]
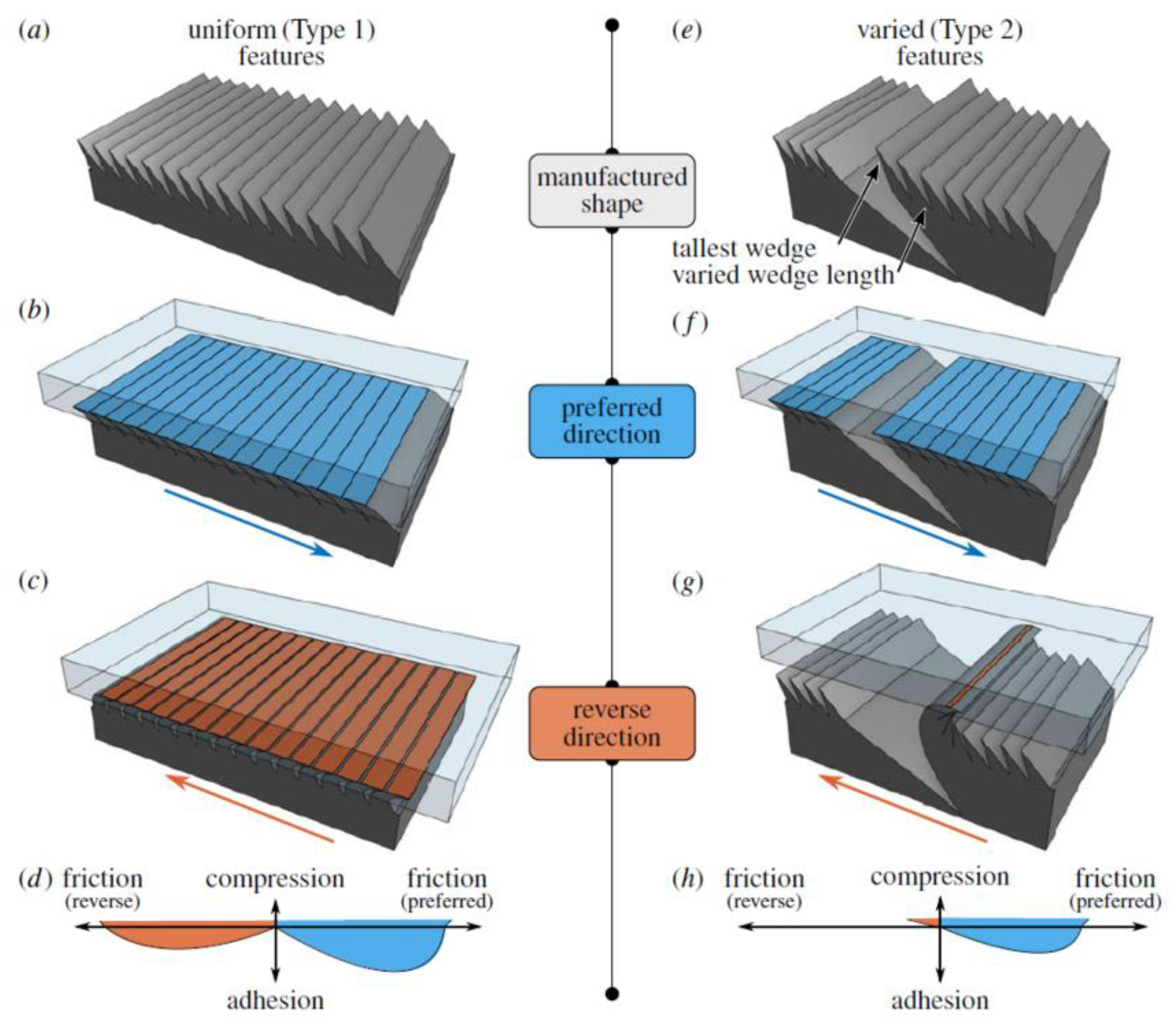
- Suresh, S.A.; Kerst, C.F.; Cutkosky, M.R.; Hawkes, E.W. Spatially variant microstructured adhesive with one-way friction. J. R. Soc. Interface 2019, 16, 20180705. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Qu, S.; Cheng, X.; Gao, X.; Guo, X. Fabrication and characterization of gecko-inspired dry adhesion, superhydrophobicity and wet self-cleaning surfaces. J. Bionic Eng. 2016, 13, 132–142. [Google Scholar] [CrossRef]
- Pelrine, R.; Pei, Q.; Kornbluh, R. Dielectric elastomers: Past, present, and potential future. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XX, Denver, CO, USA, 27 March 2018; International Society for Optics and Photonics: San Diego, CA, USA, 2018; p. 1059406. [Google Scholar]
- Madsen, F.B.; Daugaard, A.E.; Hvilsted, S.; Skov, A.L. The current state of silicone-based dielectric elastomer transducers. Macromol. Rapid Commun. 2016, 37, 378–413. [Google Scholar] [CrossRef] [Green Version]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Park, S.; Mondal, K.; Treadway, R.M., III; Kumar, V.; Ma, S.; Holbery, J.D.; Dickey, M.D. Silicones for stretchable and durable soft devices: Beyond Sylgard-184. ACS Appl. Mater. Interfaces 2018, 10, 11261–11268. [Google Scholar] [CrossRef]
- Zhou, J.; Khodakov, D.A.; Ellis, A.V.; Voelcker, N.H. Surface modification for PDMS-based microfluidic devices. Electrophoresis 2012, 33, 89–104. [Google Scholar] [CrossRef]
- Almutairi, Z.; Ren, C.L.; Simon, L. Evaluation of polydimethylsiloxane (PDMS) surface modification approaches for microfluidic applications. Colloids Surf. A Physicochem. Eng. Asp. 2012, 415, 406–412. [Google Scholar] [CrossRef]
- Gwon, M.; Park, G.; Hong, D.; Park, Y.-J.; Han, S.; Kang, D.; Koh, J.-S. Soft Directional Adhesion Gripper Fabricated by 3D Printing Process for Gripping Flexible Printed Circuit Boards. Int. J. Precis. Eng. Manuf.-Green Technol. 2022, 9, 1151–1163. [Google Scholar] [CrossRef]
- Busche, J.F.; Starke, G.; Knickmeier, S.; Dietzel, A. Controllable dry adhesion based on two-photon polymerization and replication molding for space debris removal. Micro Nano Eng. 2020, 7, 100052. [Google Scholar] [CrossRef]
- Northen, M.T.; Greiner, C.; Arzt, E.; Turner, K.L. A Gecko-inspired reversible adhesive. Adv. Mater. 2008, 20, 3905–3909. [Google Scholar] [CrossRef]
- He, Q.; Pan, H.; Zhao, Z.; Zhang, H.; Yin, G.; Wu, Y.; Cai, L.; Yu, M.; Duan, J.; Shen, Q. Polyvinyl chloride gel based electro-active switchable bio-inspired adhesive. Compos. Part A Appl. Sci. Manuf. 2022, 163, 107180. [Google Scholar] [CrossRef]
- Li, S.; Tian, H.; Shao, J.; Liu, H.; Wang, D.; Zhang, W. Switchable adhesion for nonflat surfaces mimicking geckos’ adhesive structures and toe muscles. ACS Appl. Mater. Interfaces 2020, 12, 39745–39755. [Google Scholar] [CrossRef]
- Paretkar, D.R.; Bartlett, M.D.; McMeeking, R.; Crosby, A.J.; Arzt, E. Buckling of an adhesive polymeric micropillar. J. Adhes. 2013, 89, 140–158. [Google Scholar] [CrossRef]
- Jeong, H.E.; Kwak, M.K.; Suh, K.Y. Stretchable, adhesion-tunable dry adhesive by surface wrinkling. Langmuir 2010, 26, 2223–2226. [Google Scholar] [CrossRef]
- Reddy, S.; Arzt, E.; del Campo, A. Bioinspired surfaces with switchable adhesion. Adv. Mater. 2007, 19, 3833–3837. [Google Scholar] [CrossRef]
- Wang, Y.; Lai, H.; Cheng, Z.; Zhang, H.; Zhang, E.; Lv, T.; Liu, Y.; Jiang, L. Gecko toe pads inspired in situ switchable superhydrophobic shape memory adhesive film. Nanoscale 2019, 11, 8984–8993. [Google Scholar] [CrossRef]
- Park, J.K.; Eisenhaure, J.D.; Kim, S. Reversible Underwater Dry Adhesion of a Shape Memory Polymer. Adv. Mater. Interfaces 2019, 6, 1801542. [Google Scholar] [CrossRef]
- Kroner, E. Switchable bio-inspired adhesives. In Proceedings of the Bioinspiration, Biomimetics, and Bioreplication, San Diego, CA, USA, 26 March 2015; International Society for Optics and Photonics: San Diego, CA, USA, 2015; p. 94290F. [Google Scholar]
- Paretkar, D.; Kamperman, M.; Schneider, A.S.; Martina, D.; Creton, C.; Arzt, E. Bioinspired pressure actuated adhesive system. Mater. Sci. Eng. C 2011, 31, 1152–1159. [Google Scholar] [CrossRef]
- Kroner, E.; Arzt, E. Single macropillars as model systems for tilt angle dependent adhesion measurements. Int. J. Adhes. Adhes. 2012, 36, 32–38. [Google Scholar]
- Shao, Y.; Zhao, J.; Fan, Y.; Wan, Z.; Lu, L.; Zhang, Z.; Ming, W.; Ren, L. Shape memory superhydrophobic surface with switchable transition between “Lotus Effect” to “Rose Petal Effect”. Chem. Eng. J. 2019, 382, 122989. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Rodak, D.E. Is the lotus leaf superhydrophobic? Appl. Phys. Lett. 2005, 86, 144101. [Google Scholar] [CrossRef]
- Cui, T.; Lvov, Y.; Shi, J.; Hua, F. Nanoassembly for Polymer Electronics. In Encyclopedia of Nanoscience and Nanotechnology; American Scientific Publishers: Stevenson Ranch, CA, USA, 2004; pp. 23–51. [Google Scholar]
- Zhao, X.-M.; Xia, Y.; Whitesides, G.M. Soft lithographic methods for nano-fabrication. J. Mater. Chem. 1997, 7, 1069–1074. [Google Scholar]
- Haske, W.; Chen, V.W.; Hales, J.M.; Dong, W.; Barlow, S.; Marder, S.R.; Perry, J.W. 65 nm feature sizes using visible wavelength 3-D multiphoton lithography. Opt. Express 2007, 15, 3426–3436. [Google Scholar]
- Guckenberger, D.J.; de Groot, T.E.; Wan, A.M.; Beebe, D.J.; Young, E.W. Micromilling: A method for ultra-rapid prototyping of plastic microfluidic devices. Lab A Chip 2015, 15, 2364–2378. [Google Scholar]
- Cohen, N.; Dotan, A.; Dodiuk, H.; Kenig, S. Superhydrophobic coatings and their durability. Mater. Manuf. Process. 2016, 31, 1143–1155. [Google Scholar]
- Tyge, E.; Pallisgaard, J.J.; Lillethorup, M.; Hjaltalin, N.G.; Thompson, M.K.; Clemmensen, L.H. Characterizing digital light processing (DLP) 3D printed primitives. In Proceedings of the Scandinavian Conference on Image Analysis, Copenhagen, Denmark, 15–17 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 302–313. [Google Scholar]
- Aksak, B.; Murphy, M.P.; Sitti, M. Gecko inspired micro-fibrillar adhesives for wall climbing robots on micro/nanoscale rough surfaces. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19 May 2008; IEEE: New York, NY, USA, 2008; pp. 3058–3063. [Google Scholar]
- Ge, L.; Sethi, S.; Ci, L.; Ajayan, P.M.; Dhinojwala, A. Carbon nanotube-based synthetic gecko tapes. Proc. Natl. Acad. Sci. USA 2007, 104, 10792–10795. [Google Scholar] [CrossRef] [Green Version]
- Mijangos, C.; Hernandez, R.; Martin, J. A review on the progress of polymer nanostructures with modulated morphologies and properties, using nanoporous AAO templates. Prog. Polym. Sci. 2016, 54, 148–182. [Google Scholar] [CrossRef]
- Martin, J.; Maiz, J.; Sacristan, J.; Mijangos, C. Tailored polymer-based nanorods and nanotubes by “template synthesis”: From preparation to applications. Polymer 2012, 53, 1149–1166. [Google Scholar] [CrossRef] [Green Version]
- Sahay, R.; Parveen, H.; Ranganath, A.S.; Ganesh, V.A.; Baji, A. On the adhesion of hierarchical electrospun fibrous structures and prediction of their pull-off strength. RSC Adv. 2016, 6, 47883–47889. [Google Scholar] [CrossRef]
- Darmanin, T.; Guittard, F. Recent advances in the potential applications of bioinspired superhydrophobic materials. J. Mater. Chem. A 2014, 2, 16319–16359. [Google Scholar] [CrossRef]
- Tamelier, J.; Chary, S.; Turner, K.L. Vertical anisotropic microfibers for a gecko-inspired adhesive. Langmuir 2012, 28, 8746–8752. [Google Scholar] [CrossRef]
- Filippov, A.E.; Gorb, S.N. Spatial model of the gecko foot hair: Functional significance of highly specialized non-uniform geometry. Interface Focus 2015, 5, 20140065. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Mei, T.; Sun, S. Mechanical analyses on the digital behaviour of the Tokay gecko (Gekko gecko) based on a multi-level directional adhesion model. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150085. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Li, X.; Tian, H.; Hu, H.; Tian, Y.; Shao, J.; Ding, Y. Rectangle-capped and tilted micropillar array for enhanced anisotropic anti-shearing in biomimetic adhesion. J. R. Soc. Interface 2015, 12, 20150090. [Google Scholar] [CrossRef]
- Chary, S.; Tamelier, J.; Turner, K. A microfabricated gecko-inspired controllable and reusable dry adhesive. Smart Mater. Struct. 2013, 22, 025013. [Google Scholar] [CrossRef]
- Liu, K.; Du, J.; Wu, J.; Jiang, L. Superhydrophobic gecko feet with high adhesive forces towards water and their bio-inspired materials. Nanoscale 2012, 4, 768–772. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, H.; Shao, J.; Ding, Y. Fabrication of well-defined mushroom-shaped structures for biomimetic dry adhesive by conventional photolithography and molding. ACS Appl. Mater. Interfaces 2014, 6, 2213–2218. [Google Scholar] [PubMed]
- Shahsavan, H.; Zhao, B. Conformal adhesion enhancement on biomimetic microstructured surfaces. Langmuir 2011, 27, 7732–7742. [Google Scholar] [CrossRef] [PubMed]
- Bovero, E.; Krahn, J.; Menon, C. Fabrication and testing of self cleaning dry adhesives utilizing hydrophobicity gradient. J. Bionic Eng. 2015, 12, 270–275. [Google Scholar] [CrossRef]
- Castellanos, G.; Arzt, E.; Kamperman, M. Effect of viscoelasticity on adhesion of bioinspired micropatterned epoxy surfaces. Langmuir 2011, 27, 7752–7759. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Turner, K.L.; Israelachvili, J.N. Friction and adhesion of gecko-inspired PDMS flaps on rough surfaces. Langmuir 2012, 28, 11527–11534. [Google Scholar] [CrossRef] [PubMed]
- Cañas, N.; Kamperman, M.; Völker, B.; Kroner, E.; McMeeking, R.M.; Arzt, E. Effect of nano-and micro-roughness on adhesion of bioinspired micropatterned surfaces. Acta Biomater. 2012, 8, 282–288. [Google Scholar] [CrossRef]
- Ran, C.; Ding, G.; Liu, W.; Deng, Y.; Hou, W. Wetting on nanoporous alumina surface: Transition between Wenzel and Cassie states controlled by surface structure. Langmuir 2008, 24, 9952–9955. [Google Scholar] [CrossRef]
- Luo, X.; Dong, X.; Hou, Y.; Zhang, L.; Zhang, P.; Cai, J.; Zhao, M.; Ramos, M.A.; Hu, T.S.; Zhao, H. Photo-Detachable Self-Cleaning Surfaces Inspired by Gecko Toepads. Langmuir 2021, 37, 8410–8416. [Google Scholar] [CrossRef]
- Yan, C.; Jiang, P.; Jia, X.; Wang, X. 3D printing of bioinspired textured surfaces with superamphiphobicity. Nanoscale 2020, 12, 2924–2938. [Google Scholar] [CrossRef]
- Elbadawi, M.; Andrikopoulos, G.; Nikolakopoulos, G.; Gustafsson, T. Bio-Inspired Climbing Robots in Wet Environments: Recent Trends in Adhesion Methods and Materials. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; IEEE: New York, NY, USA, 2018; pp. 2347–2353. [Google Scholar]
- Coenjarts, C.A.; Ober, C.K. Two-photon three-dimensional microfabrication of poly (dimethylsiloxane) elastomers. Chem. Mater. 2004, 16, 5556–5558. [Google Scholar] [CrossRef]
- McCoul, D.; Rosset, S.; Schlatter, S.; Shea, H. Inkjet 3D printing of UV and thermal cure silicone elastomers for dielectric elastomer actuators. Smart Mater. Struct. 2017, 26, 125022. [Google Scholar] [CrossRef] [Green Version]
- Ferraris, S.; Guarino, V.; Cochis, A.; Varesano, A.; Maya, I.C.; Vineis, C.; Rimondini, L.; Spriano, S. Aligned keratin submicrometric-fibers for fibroblasts guidance onto nanogrooved titanium surfaces for transmucosal implants. Mater. Lett. 2018, 229, 1–4. [Google Scholar] [CrossRef]
- Khan, I.; Saeed, K.; Khan, I. Nanoparticles: Properties, applications and toxicities. Arab. J. Chem. 2019, 12, 908–931. [Google Scholar] [CrossRef]
- Oktay, B.; Kayaman-Apohan, N. Polydimethylsiloxane (PDMS)-based antibacterial organic–inorganic hybrid coatings. J. Coat. Technol. Res. 2013, 10, 785–798. [Google Scholar] [CrossRef]
- Seong, M.; Jeong, C.; Yi, H.; Park, H.-H.; Bae, W.-G.; Park, Y.-B.; Jeong, H.E. Adhesion of bioinspired nanocomposite microstructure at high temperatures. Appl. Surf. Sci. 2017, 413, 275–283. [Google Scholar] [CrossRef]
- Tian, Y.; Qi, H.; Wu, H.; Zhang, D. Friction behavior of gecko-inspired polydimethylsiloxane micropillar array with tailored Young’s modulus by incorporation of ZrO2 particles. Chem. Phys. Lett. 2021, 763, 138202. [Google Scholar] [CrossRef]
- Koh, K.H.; Chetty, R.K.; Ponnambalam, S. Modeling and simulation of electrostatic adhesion for wall climbing robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; IEEE: New York, NY, USA, 2011; pp. 2031–2036. [Google Scholar]
- Alizadehyazdi, V.; Modabberifar, M.; Mahmoudzadeh Akherat, S.J.; Spenko, M. Electrostatic self-cleaning gecko-like adhesives. J. R. Soc. Interface 2018, 15, 20170714. [Google Scholar] [CrossRef]
- He, Q.; Yang, X.; Wang, Z.; Zhao, J.; Yu, M.; Hu, Z.; Dai, Z. Advanced electro-active dry adhesive actuated by an artificial muscle constructed from an ionic polymer metal composite reinforced with nitrogen-doped carbon nanocages. J. Bionic Eng. 2017, 14, 567–578. [Google Scholar] [CrossRef]
- Pugal, D.; Jung, K.; Aabloo, A.; Kim, K.J. Ionic polymer–metal composite mechanoelectrical transduction: Review and perspectives. Polym. Int. 2010, 59, 279–289. [Google Scholar] [CrossRef]
- Carrico, J.D.; Traeden, N.W.; Aureli, M.; Leang, K.K. Fused filament 3D printing of ionic polymer-metal composites (IPMCs). Smart Mater. Struct. 2015, 24, 125021. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Scaraggi, M.; Lin, P.; Yu, B.; Wang, D.; Dini, D.; Zhou, F. Nanohydrogel brushes for switchable underwater adhesion. J. Phys. Chem. C 2017, 121, 8452–8463. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Q.; Gao, Z.; Hou, R.; Gao, G. Bioinspired adhesive hydrogel driven by adenine and thymine. ACS Appl. Mater. Interfaces 2017, 9, 17645–17652. [Google Scholar] [CrossRef] [PubMed]
- Son, D.; Liimatainen, V.; Sitti, M. Machine Learning-Based and Experimentally Validated Optimal Adhesive Fibril Designs. Small 2021, 17, 2102867. [Google Scholar] [CrossRef]
- Chen, F.; Xiang, W.; Yin, S.; Huang, S. Magnetically Responsive Superhydrophobic Surface with Switchable Adhesivity Based on Electrostatic Air Spray Deposition. ACS Appl. Mater. Interfaces 2021, 13, 20885–20896. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Q.; Zou, R.; Song, B.; Yan, C.; Shi, Y.; Su, B. 3D-Printed Superhydrophobic and Magnetic Device That Can Self-Powered Sense a Tiny Droplet Impact. Engineering 2022, 15, 196–205. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Q.; Wu, Z.; Chen, D.; Yan, C.; Shi, Y.; Dickey, M.D.; Su, B. A Superconducting-Material-Based Maglev Generator Used for Outer-Space. Adv. Mater. 2022, 34, 2203814. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Kim, H.S.; Song, H.W.; Kwak, M.K. Fluorocarbon rubber-based inert dry adhesive for applications under harsh conditions. ACS Appl. Polym. Mater. 2021, 3, 3981–3988. [Google Scholar] [CrossRef]
- Lutz, C.; Ma, Z.; Thelen, R.; Syurik, J.; Il’in, O.; Ageev, O.; Jouanne, P.; Hölscher, H. Analysis of carbon nanotube arrays for their potential use as adhesives under harsh conditions as in space technology. Tribol. Lett. 2019, 67, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef] [Green Version]
- Sandoval, J.A.; Jadhav, S.; Quan, H.; Deheyn, D.D.; Tolley, M.T. Reversible adhesion to rough surfaces both in and out of water, inspired by the clingfish suction disc. Bioinspiration Biomim. 2019, 14, 066016. [Google Scholar] [CrossRef]
- Frey, S.T.; Haque, A.T.; Tutika, R.; Krotz, E.V.; Lee, C.; Haverkamp, C.B.; Markvicka, E.J.; Bartlett, M.D. Octopus-inspired adhesive skins for intelligent and rapidly switchable underwater adhesion. Sci. Adv. 2022, 8, eabq1905. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Adhesion Mechanism | Application | Ref. |
|---|---|---|
| Dry Fibrillary |
| [28] |
| [29,30] | |
| [8,11] | |
| [29,31] | |
| [32,33] | |
| [32] | |
| [34] | |
| [19,32,35] | |
| Elastomeric |
| [36] |
| [36] | |
| [37,38,39] | |
| Electrostatic |
| [40] |
| [41] | |
| [42] | |
| [43] | |
| [43,44] | |
| [43] | |
| Thermoplastic |
| [45] |
| [46,47] |
| Sr | Polymer Adhesives | CNT Adhesives |
|---|---|---|
| 1. | Fabricated by a top-down approach | Fabricated by a bottom-up approach |
| 2. | Easy and inexpensive process | Complex and expensive process |
| 3. | Limited resolution obtained | High resolution obtained |
| 4. | Lower adhesion force obtained | Higher adhesion force obtained |
| 5. | Large area required for fabrication | Smaller area sufficient for fabrication |
| 6. | Preload required is less | Preload required is high |
| 7. | Mechanical strength obtained is relatively low | Mechanical strength obtained is relatively high |
| Polymer | Abbreviation | Type of Elastomer | MR (A:B) | CT (°C) | Ct (min) | CT2 (°C) | Ct2 (min) |
|---|---|---|---|---|---|---|---|
| Mold Star 30 | MS 30 | Platinum Cure Silicone | 1:1 | 60 | 60 | - | - |
| Mold Max 60 | MM 60 | Tin Cure Silicone | 100:3 | 23 | 180 | 60 | 120 |
| Mold Max 40 | MM 40 | Tin Cure Silicone | 10:1 | 23 | 180 | 60 | 120 |
| Smooth Sil 960 | SS 960 | Platinum Cure Silicone | 10:1 | 60 | 120 | - | - |
| Plast Sil 40 | PS 40 | Platinum Cure Silicone | 10:1 | 60 | 60 | - | - |
| Plast Sil 60 | PS 60 | Platinum Cure Silicone | 10:1 | 60 | 60 | - | - |
| Sylgard 170 | S170 | Platinum Cure Silicone | 10:1 | 60 | 60 | 150 | 30 |
| Sylgard 182 | S182 | Platinum Cure Silicone | 10:1 | 60 | 240 | 150 | 30 |
| Sylgard 184 | S184 | Platinum Cure Silicone | 10:1 | 60 | 120 | 150 | 30 |
| Sylgard 186 | S186 | Platinum Cure Silicone | 10:1 | 60 | 120 | 150 | 30 |
| TC-5041 | TC5041 | Platinum Cure Silicone | 10:1 | 60 | 60 | - | - |
| Property | PEN | PI | PPS | PET |
|---|---|---|---|---|
| Temperature (°C) | 180 | 240 | 180 | 105 |
| Dielectric Breakdown (KV/mm) | 300 | 280 | 320 | 280 |
| Dielectric Constant | 2.9 | 3.3 | 2.8 | 3.1 |
| Water Absorption (%) | 0.3 | 1.3 | 0.02 | 0.4 |
| Adhesive | Advantages | Disadvantages | Applications |
|---|---|---|---|
| PDMS | High elasticity, easy curing, cheaper | Low productivity, bending problems | Wall-climbing robots |
| PMMA | High mechanical strength, easy application | Brittle | Climbing robot, grippers |
| PS | High aspect ratio | Low surface energy, limitation of accurate replication | Medical adhesives |
| PVS | Provides similar mechanical properties as that of geckos, low environmental sensitivity | Complex to prepare | Robots |
| PE | High aspect ratio | Low surface energy | Biomedical |
| PP | High aspect ratio | Low surface energy | Climbing devices |
| PU | High surface energy | Long curing time | Legged robots |
| Silicon | Easily available, durable, high quality | Poor tear strength | Space equipment |
| CNT | High mechanical modulus, high aspect ratio | Complicated, costly, high pre-load | Healthcare monitoring application |
| Sr. | Material | Application | Reference |
|---|---|---|---|
| 1. | Mushroom-shaped bio microstructures PDMS | Detachment of adhesive by twisting method rather than peeling off. | [124] |
| 2. | Oxygen-plasma-treated cross-linked PDMS | Increase in adhesion strength and improvement in duration of bonding of the adhesive. | [125] |
| 3. | 3D laser-printed IP g -780 | Development of adhesive nanostructure prototypes of various shapes and sizes below 100 nanometers. | [126] |
| 4. | Mushroom-shaped PU polymers | Strong fibrillary shaped hair structures produced enhanced adhesion. | [127] |
| 5. | 3D-printed ABS polymer with coating | Enhancement in water-repelling property of adhesive surface. | [128] |
| 6. | Electron-beam-lithography- treated SU 8 epoxy | Adhesive surfaces developed with high and low adhesion and could also function in wet surfaces. | [129] |
| 7. | 3D-printed photopolymer resin | Enhanced water-repelling property of the adhesive surface. | [130] |
| 8. | Electrospun PVDF fibers | Improvement in the pull-off force of the adhesive. | [131] |
| 9. | Spatial-direction-treated adhesive | Improvement in carrying weight when loaded in one direction and reduction in weight-carrying capacity in the opposite direction. Improvement in friction ratio. | [132] |
| 10. | Inductively coupled plasma (ICP)-treated PDMS | Improvement in adhesion strength, microstructure stability, and water, contaminant repelling property of the adhesive. | [133] |
| Sample Name | D (µm) | C (µm) | H (µm) | Aspect Ratio | Microfiber Density (cm2) |
|---|---|---|---|---|---|
| P-8-28-20 | 8 | 28 | 20 | 2.5 | 2.95 × (10)5 |
| P-10-30-20 | 10 | 30 | 20 | 2.0 | 2.57 × (10)5 |
| P-10-20-20 | 10 | 20 | 20 | 2.0 | 5.77 × (10)5 |
| P-20-40-20 | 20 | 40 | 20 | 2.0 | 1.44 × (10)5 |
| Micro-Structure | Adhesion Property | Reference |
|---|---|---|
| Nanorod-shaped fibrils and adhesive fabricated with magnetic materials. | On being subjected to a magnetic force, contact area reduces and consequently decreases adhesion. | [142] |
| PVC-based electro-active switchable micro-pillars. | Increase in voltage, increased adhesion. | [143] |
| Mushroom shaped electro-active three-layered hierarchal microadhesive. | Adjusting the voltage can increase or decrease adhesive force and especially can work on non-flat surfaces. | [144] |
| Single PDMS hairy micropillars with various aspect ratios were studied for adhesion and buckling under compressive preload. | A decrease in aspect ratio resulted in an increase in adhesion. For reversible buckling, tip contact was recovered and only a slight reduction in adhesion happened. | [145] |
| Flat, spherical, concave, mushroom, spatula terminal shaped micron sized pillar adhesives fabricated. | Contact shape influenced the adhesion behavior of patterned surfaces. Mushroom shaped structure exhibited highest pull-off force on flat surfaces. | [120] |
| Wrinkled PDMS micro-pillars for fabricating adhesive. | Stretching (straining) the adhesive resulted in strong normal and adhesion force. On releasing the strain, the forces reduced nearly to zero. | [146] |
| Shape memory thermoplastic elastomers for fabricating vertical and tilted micro-pillars. | The shape memory effect could generate switchable adhesion. Vertical pillars generated more adhesion. On reheating, adhesion is restored. | [147] |
| Superhydrophobic pillar structures are fabricated from structured PU. These pillars are then sticked to a shape memory fiber to form a composite film. | The shape memory effect allows the film to memorize and display different adhesive properties without any external force. | [148] |
| Reversible dry drum-shaped adhesive structures fabricated from shape memory polymer | The adhesion test showed that strength depended on temperature and applied load. High adhesion was attributed due to the shape memory property. | [149] |
| Adhesive fabricated from composite materials of patterned PDMS and shape memory alloys with larger dimensions subjected to pressure and temperature stimuli. | Shape memory alloy changes its topography as a function of temperature. As a result, the contact area and adhesive pattern towards a substrate is modified. Switchable adhesion is obtained by external stimuli. | [150] |
| Two types of superhydrophobic arrays of concave micro- and nanostructures fabricated from shape memory polymers. One was intact and the other was compressed. | Intact micro/nanostructures exhibited low adhesive forces, whereas compressed microstructure arrays with intact nanostructures demonstrated high water adhesion. | [153] |
| Polydopamine doped as a nanoparticle to PDMS micropillars for adhesive fabrication | Doped micro-pillar exhibits 688% higher adhesion and self-cleaning property relative to pure PDMS micropillar. | [180] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sikdar, S.; Rahman, M.H.; Siddaiah, A.; Menezes, P.L. Gecko-Inspired Adhesive Mechanisms and Adhesives for Robots—A Review. Robotics 2022, 11, 143. https://doi.org/10.3390/robotics11060143
Sikdar S, Rahman MH, Siddaiah A, Menezes PL. Gecko-Inspired Adhesive Mechanisms and Adhesives for Robots—A Review. Robotics. 2022; 11(6):143. https://doi.org/10.3390/robotics11060143
Chicago/Turabian StyleSikdar, Soumya, Md Hafizur Rahman, Arpith Siddaiah, and Pradeep L. Menezes. 2022. "Gecko-Inspired Adhesive Mechanisms and Adhesives for Robots—A Review" Robotics 11, no. 6: 143. https://doi.org/10.3390/robotics11060143
APA StyleSikdar, S., Rahman, M. H., Siddaiah, A., & Menezes, P. L. (2022). Gecko-Inspired Adhesive Mechanisms and Adhesives for Robots—A Review. Robotics, 11(6), 143. https://doi.org/10.3390/robotics11060143