
AutoDRIVE: A Comprehensive, Flexible and Integrated Digital Twin Ecosystem for Autonomous Driving Research & Education

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
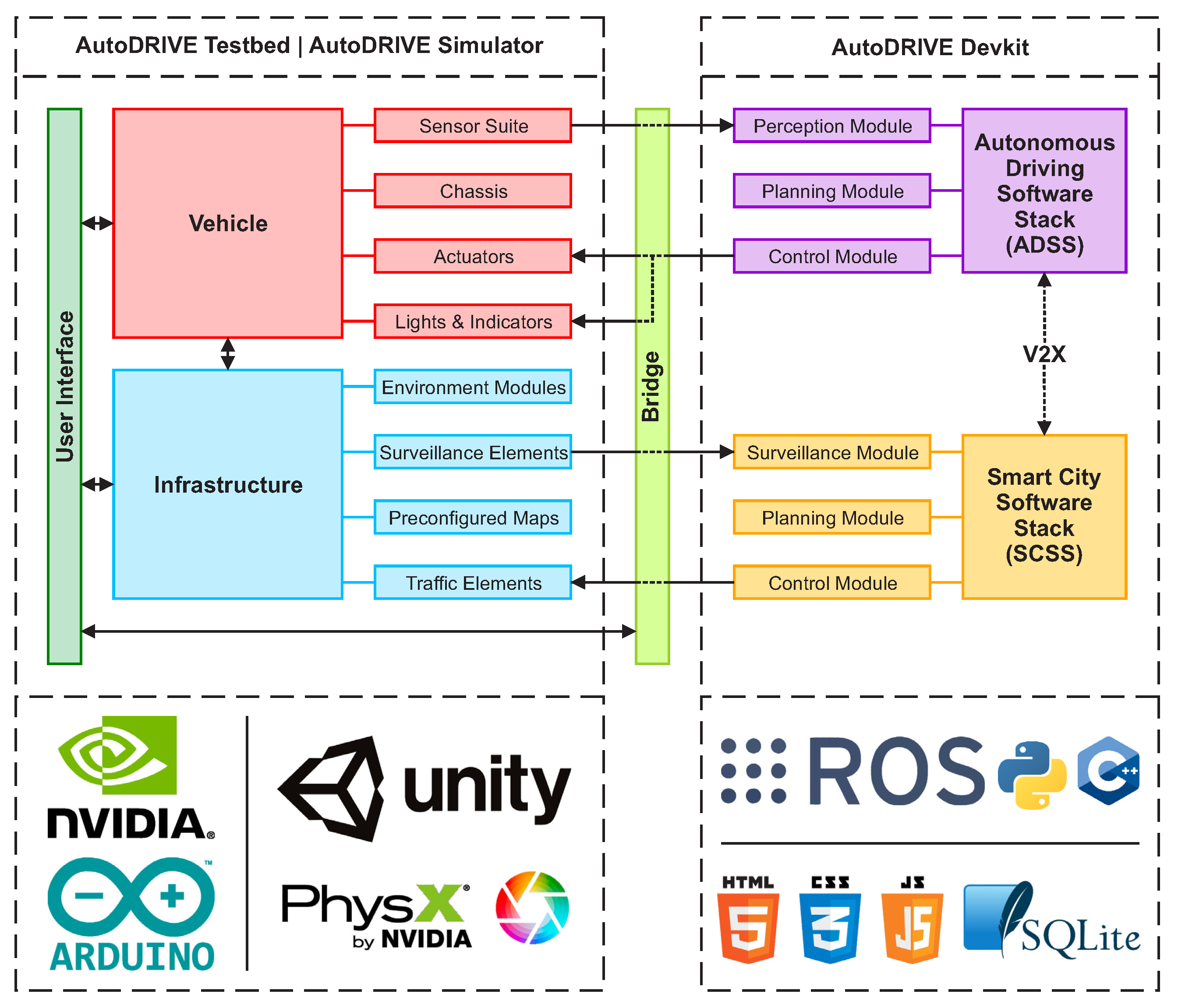
- Comprehensive: The ecosystem offers a scaled car-like vehicle with abundant sensors, which supports single- as well as multi-agent algorithms with or without vehicle-to-vehicle (V2V) communication. It also provides a modular infrastructure development kit comprising various environment modules, traffic elements and surveillance elements, which supports internet-of-things (IoT) and vehicle-to-infrastructure (V2I) communication. On the software front, the ecosystem hosts a high-fidelity simulator and supports the development of autonomous driving as well as smart city solutions.
- Flexible: The ecosystem offers modular hardware components, a convenient high-fidelity simulator, and an extensive software development support, which enables the end-users to flexibly prototype and validate their autonomy solutions right out of the box. Additionally, the completely open-hardware, open-software architecture of the ecosystem allows users to adapt any of the existing hardware (including the design of the vehicle as well as the infrastructure modules) and/or software (including the codebase of the development framework as well as the simulator) to better fit their use-cases.
- Integrated: The ecosystem hosts a tightly coupled trio, comprising AutoDRIVE Devkit (to flexibly develop connected autonomy solutions), AutoDRIVE Simulator (to virtually prototype and test them under a variety of conditions and edge-cases), and AutoDRIVE Testbed (to deploy and validate them in controlled real-world settings). The harmony among these three platforms not only enhances the hardware–software co-development of autonomy solutions, but also helps to seamlessly bridge the gap between software simulation and hardware deployment for the verification and validation of these safety-critical systems.
2. State of the Art
3. AutoDRIVE Testbed
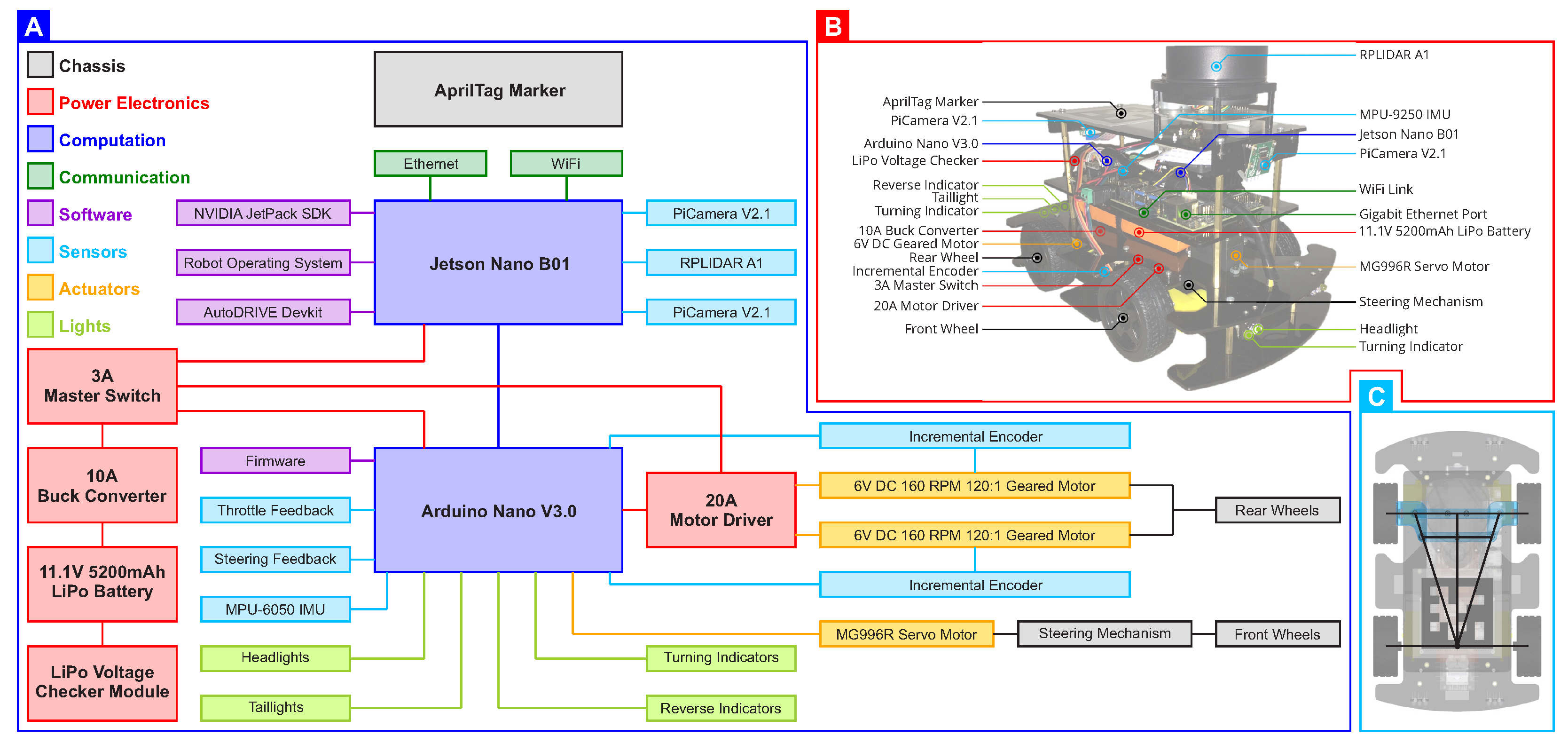
3.1. Vehicle
3.1.1. Chassis
3.1.2. Power Electronics
3.1.3. Sensor Suite
3.1.4. Computation, Communication and Software
3.1.5. Actuators
3.1.6. Lights and Indicators
3.2. Infrastructure
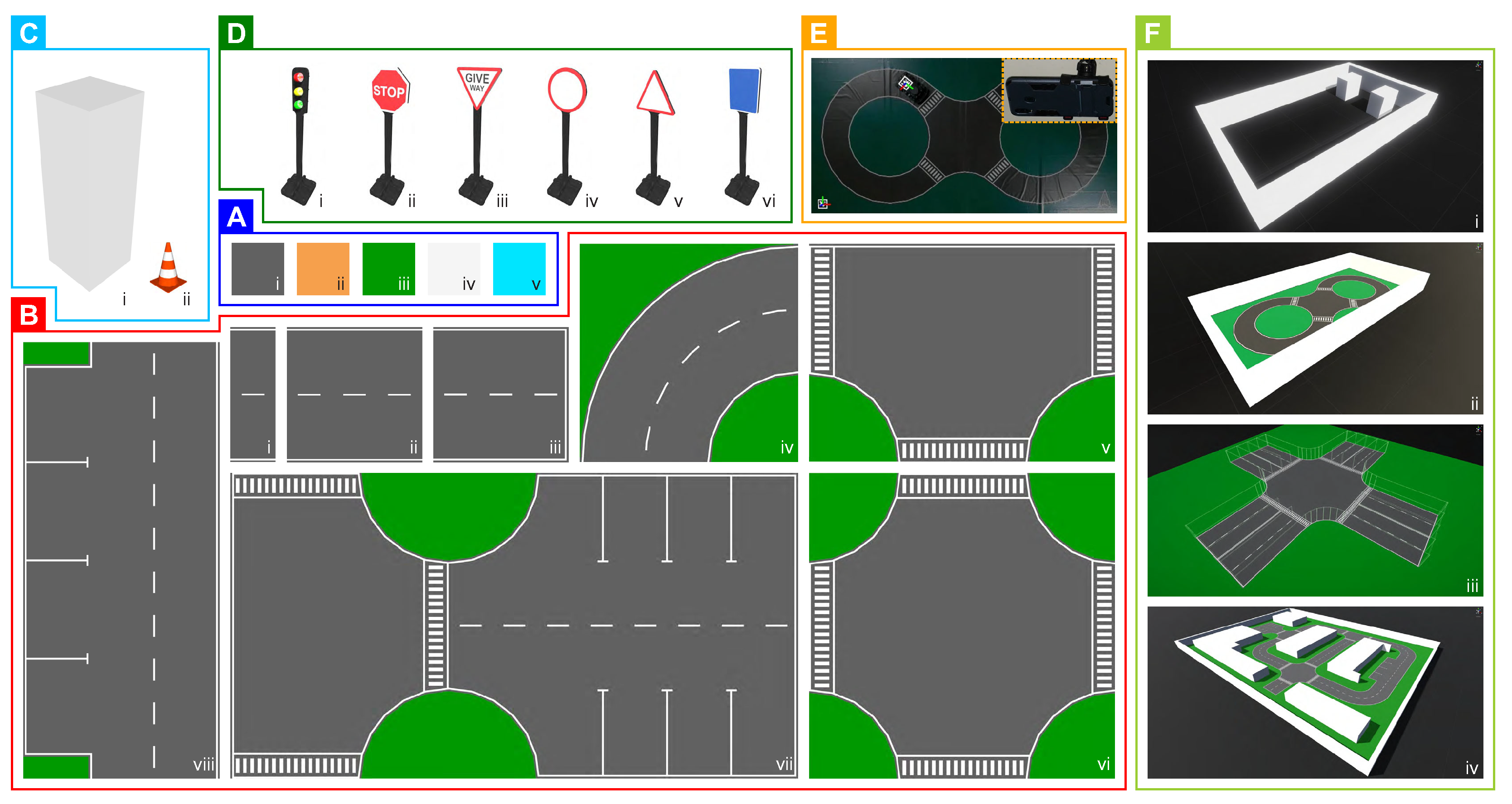
3.2.1. Environment Modules
- Terrain Modules: These define off-road segments of the environment. AutoDRIVE currently supports five terrains with tunable physical properties (refer Figure 3A).
- Road Kits: These enable the reconfigurable construction of drivable segments of the environment. AutoDRIVE currently supports 1, 2, 4 and 6 lane road kits, each having 8 different modules (refer Figure 3B).
- Obstruction Modules: These 3D objects define static obstacles within the scene. AutoDRIVE currently supports two such modules (refer Figure 3C).
3.2.2. Traffic Elements
3.2.3. Surveillance Elements
3.2.4. Preconfigured Maps
4. AutoDRIVE Simulator
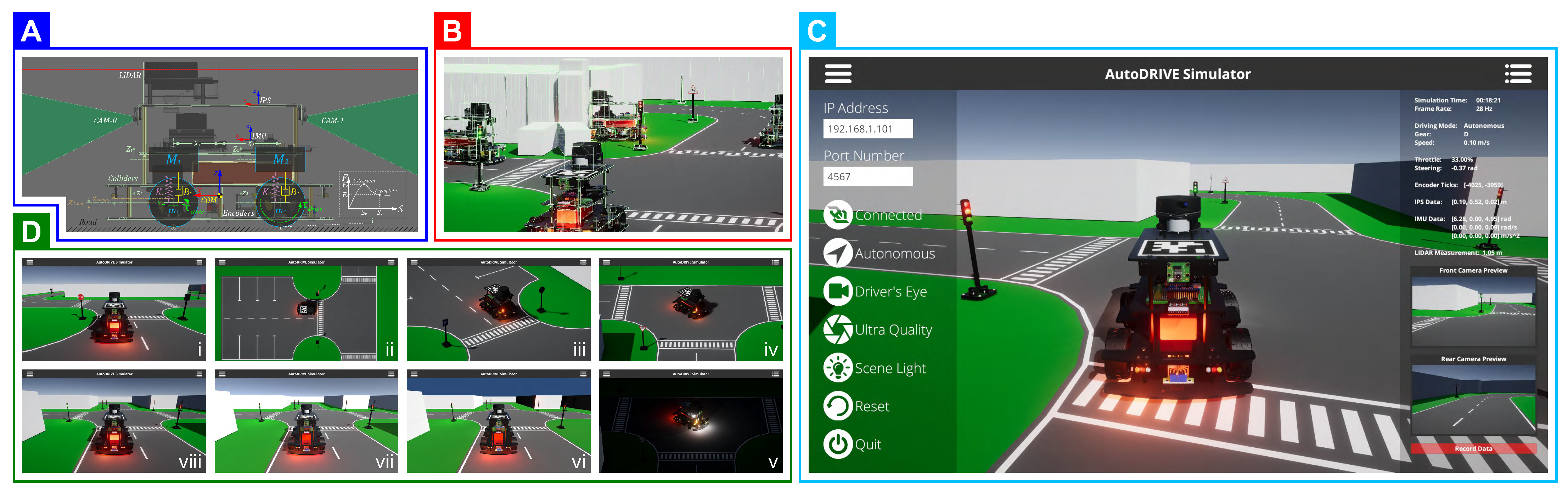
4.1. Vehicle Dynmaics Simulation
4.2. Sensor Simulation
4.3. Actuator Simulation
4.4. Infrastructure Simulation
- AutoDRIVE IDK: The modular and reconfigurable infrastructure development kit (IDK) can be used to create custom scenarios and maps by setting up the terrain modules, road networks, obstruction modules and traffic elements. These assets are present within the simulator source files. Particularly, the preconfigured maps depicted in Figure 3F(i,iii,iv) were constructed using the AutoDRIVE IDK.
- Plug-In Scenarios: AutoDRIVE Simulator supports third-party tools (e.g., RoadRunner [25]) and modular open-source architecture (MOSA) standards (e.g., OpenSCENARIO [26], OpenDRIVE [27], etc.) that enable extensibility. Additionally, users can import a wide array of plugins, packages and assets in a variety of industry-standard formats (FBX, OBJ, SKP, 3DS, USD, etc.) for developing or customizing driving scenarios. Furthermore, the graphics textures designed for AutoDRIVE Testbed can first be imported into the simulator before large-scale printing and real-world setup. The preconfigured map depicted in Figure 3F(ii) was designed using a third-party graphics’ editing software, imported in AutoDRIVE Simulator, and finally printed and set up using AutoDRIVE Testbed.
- Unity Terrain: Being built atop the Unity game engine, AutoDRIVE Simulator natively supports scenario design and development using Unity Terrain [28]. Users can define the terrain mesh, texture, heightmap, vegetation, skybox, wind, etc., to design on-road/off-road scenarios and perform variability testing.
4.5. Simulator Features
5. AutoDRIVE Devkit
5.1. Autonomous Driving Software Stack
5.1.1. ROS Package
5.1.2. Scripting APIs
5.2. Smart City Software Stack
5.2.1. SCM Server
5.2.2. SCM Webapp
6. Demonstration Case-Studies
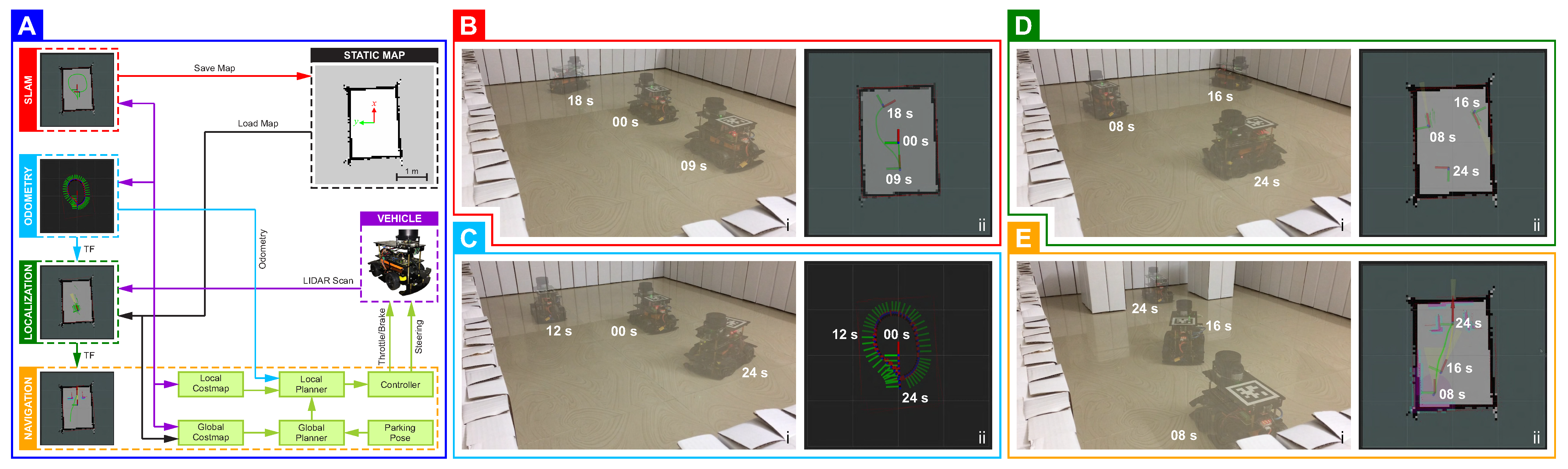
6.1. Autonomous Parking
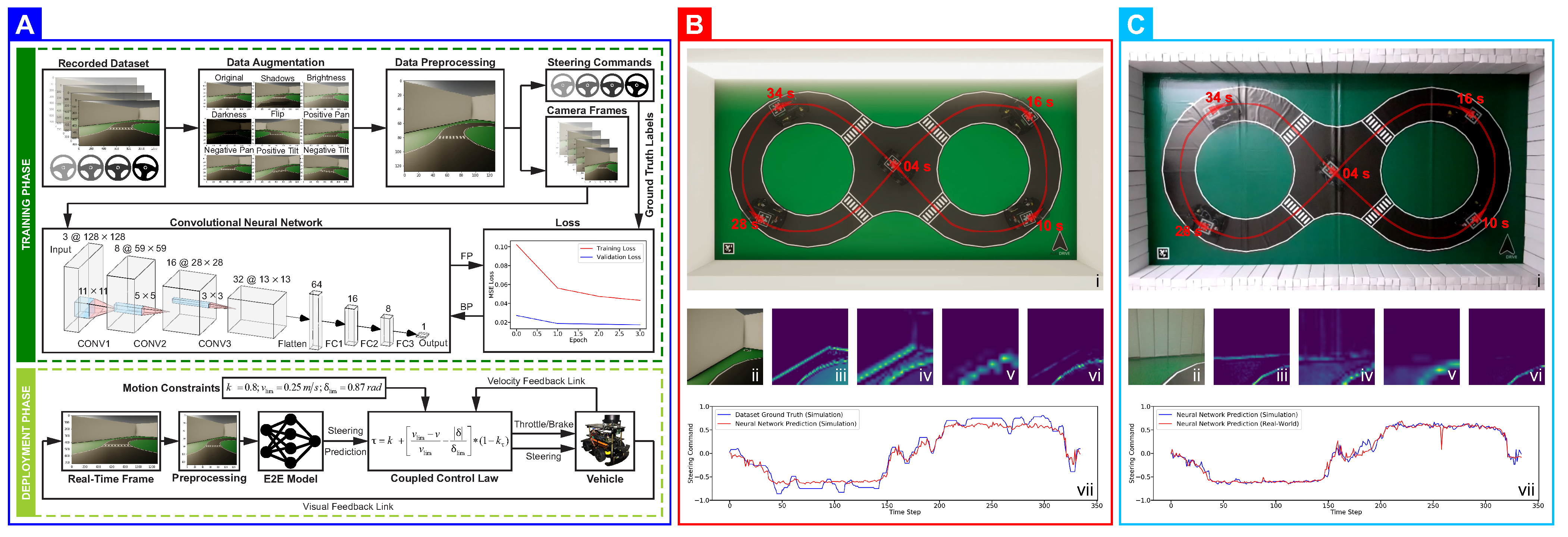
6.2. Behavioral Cloning
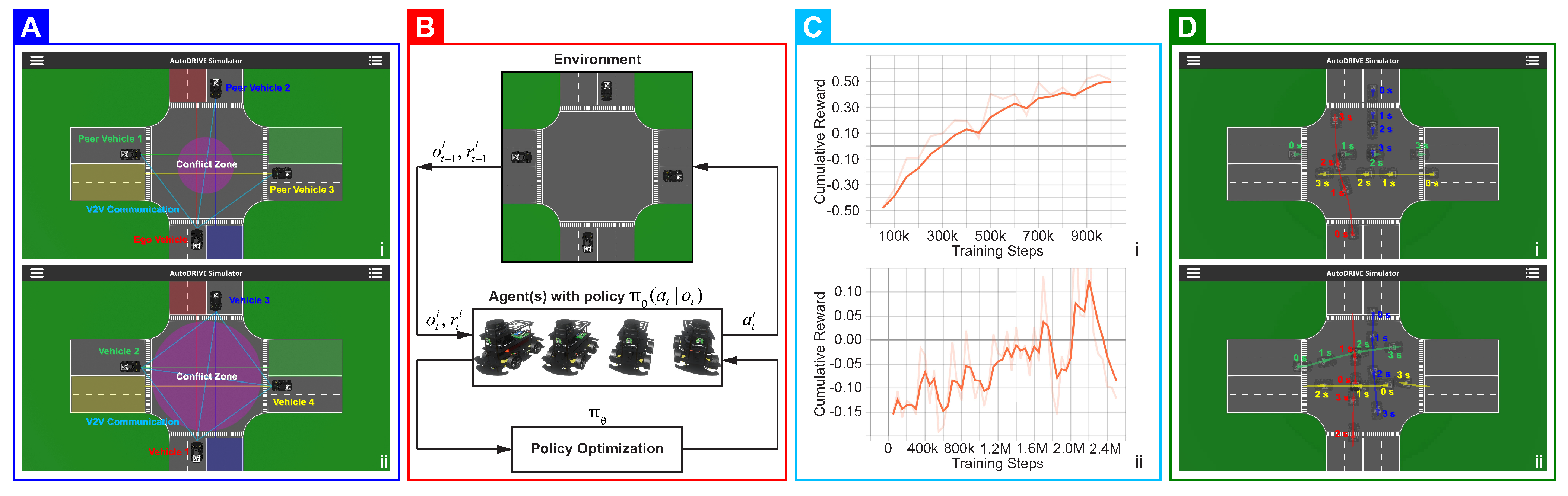
6.3. Intersection Traversal
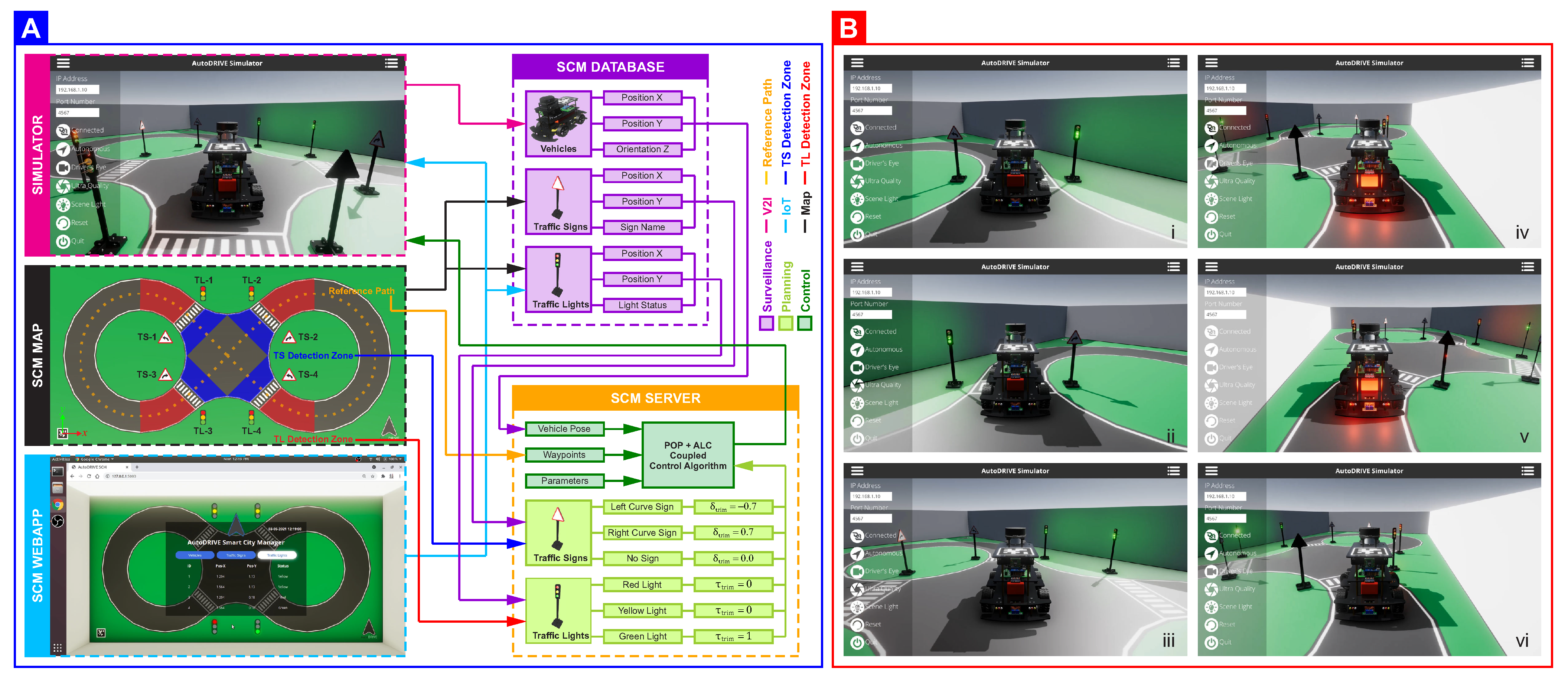
6.4. Smart City Management
7. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. Proc. Mach. Learn. Res. 2017, 78, 1–16. [Google Scholar]
- Rong, G.; Shin, B.H.; Tabatabaee, H.; Lu, Q.; Lemke, S.; Možeiko, M.; Boise, E.; Uhm, G.; Gerow, M.; Mehta, S.; et al. LGSVL Simulator: A High Fidelity Simulator for Autonomous Driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. In Field and Service Robotics; Hutter, M., Siegwart, R., Eds.; Springer: Cham, Switzerland, 2018; pp. 621–635. [Google Scholar]
- Karaman, S.; Anders, A.; Boulet, M.; Connor, J.; Gregson, K.; Guerra, W.; Guldner, O.; Mohamoud, M.; Plancher, B.; Shin, R.; et al. Project-based, collaborative, algorithmic robotics for high school students: Programming self-driving race cars at MIT. In Proceedings of the 2017 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 11 March 2017; pp. 195–203. [Google Scholar] [CrossRef]
- Goldfain, B.; Drews, P.; You, C.; Barulic, M.; Velev, O.; Tsiotras, P.; Rehg, J.M. AutoRally: An Open Platform for Aggressive Autonomous Driving. IEEE Control. Syst. Mag. 2019, 39, 26–55. [Google Scholar] [CrossRef]
- O’Kelly, M.; Sukhil, V.; Abbas, H.; Harkins, J.; Kao, C.; Pant, Y.V.; Mangharam, R.; Agarwal, D.; Behl, M.; Burgio, P.; et al. F1/10: An Open-Source Autonomous Cyber-Physical Platform. arXiv 2019, arXiv:1901.08567. [Google Scholar]
- Srinivasa, S.S.; Lancaster, P.; Michalove, J.; Schmittle, M.; Summers, C.; Rockett, M.; Smith, J.R.; Choudhury, S.; Mavrogiannis, C.; Sadeghi, F. MuSHR: A Low-Cost, Open-Source Robotic Racecar for Education and Research. arXiv 2019, arXiv:1908.08031. [Google Scholar]
- HyphaROS Workshop. HyphaROS Racecar. Available online: https://github.com/Hypha-ROS/hypharos_racecar (accessed on 13 February 2021).
- Donkey Community. An Open-Source DIY Self-Driving Platform for Small-Scale Cars. Available online: https://www.donkeycar.com (accessed on 21 February 2021).
- Automatic Control Laboratory, ETH Zürich. ORCA (Optimal RC Racing) Project; ETH Zürich: Zürich, Switzerland; Available online: https://control.ee.ethz.ch/research/team-projects/autonomous-rc-car-racing.html (accessed on 12 March 2021).
- Kalidien, T.; van der Burg, P.; Mulder, A.; Rietveld, E.; Vonk, M.; Hellendoorn, H.; Alirezaei, M. Design and Development of the Delft Scaled Vehicle: A Platform for Autonomous Driving Tests. Bachelor’s Thesis, Delft Center for Systems & Control, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Pappas, J.; Yuan, C.H.; Lu, C.S.; Nassar, N.; Miller, A.; van Leeuwen, S.; Borrelli, F. Berkeley Autonomous Race Car (BARC). Available online: https://sites.google.com/site/berkeleybarcproject (accessed on 1 March 2021).
- Quanser Consulting Inc. QCar–A Sensor-Rich Autonomous Vehicle; Quanser Consulting Inc.: Markham, ON, Canada; Available online: https://www.quanser.com/products/qcar (accessed on 15 March 2021).
- Amazon Web Services. AWS DeepRacer. Available online: https://aws.amazon.com/deepracer (accessed on 15 March 2021).
- Paull, L.; Tani, J.; Ahn, H.; Alonso-Mora, J.; Carlone, L.; Cap, M.; Chen, Y.F.; Choi, C.; Dusek, J.; Fang, Y.; et al. Duckietown: An Open, Inexpensive and Flexible Platform for Autonomy Education and Research. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1497–1504. [Google Scholar] [CrossRef]
- Robotis Inc. TurtleBot3; Robotis Inc.: Beijing, China; Available online: https://emanual.robotis.com/docs/en/platform/turtlebot3/overview (accessed on 17 March 2021).
- Wilson, S.; Gameros, R.; Sheely, M.; Lin, M.; Dover, K.; Gevorkyan, R.; Haberland, M.; Bertozzi, A.; Berman, S. Pheeno, A Versatile Swarm Robotic Research and Education Platform. IEEE Robot. Autom. Lett. 2016, 1, 884–891. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the ICRA 2009 Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3. [Google Scholar]
- Koenig, N.P.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef]
- Brockman, G.; Cheung, V.; Pettersson, L.; Schneider, J.; Schulman, J.; Tang, J.; Zaremba, W. OpenAI Gym. arXiv 2016, arXiv:1606.01540. [Google Scholar]
- Hershberger, D.; Gossow, D.; Faust, J. RViz: 3D Visualization Tool for ROS. Available online: http://wiki.ros.org/rviz (accessed on 23 March 2021).
- Samak, T.V.; Samak, C.V.; Xie, M. AutoDRIVE Simulator: A Simulator for Scaled Autonomous Vehicle Research and Education. In Proceedings of the 2021 2nd International Conference on Control, Robotics and Intelligent System, CCRIS’21, Qingdao, China, 20–22 August 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Samak, T.V.; Samak, C.V. AutoDRIVE Simulator–Technical Report. arXiv 2022, arXiv:2211.07022. [Google Scholar] [CrossRef]
- Mathworks Inc. RoadRunner; Mathworks Inc.: Natick, MA, USA; Available online: https://www.mathworks.com/products/roadrunner.html (accessed on 27 March 2021).
- Association for Standardization of Automation and Measuring Systems (ASAM). OpenSCENARIO; ASAM: Dresden, Germany; Available online: https://www.asam.net/standards/detail/openscenario (accessed on 30 March 2021).
- Association for Standardization of Automation and Measuring Systems (ASAM). OpenDRIVE; ASAM: Dresden, Germany; Available online: https://www.asam.net/standards/detail/opendrive (accessed on 30 March 2021).
- Unity Technologies. Unity Terrain; Unity Technologies: San Francisco, CA, USA; Available online: https://docs.unity3d.com/Manual/script-Terrain.html (accessed on 22 February 2021).
- Unity Technologies. Unity; Unity Technologies: San Francisco, CA, USA; Available online: https://unity.com (accessed on 26 January 2021).
- NVIDIA GameWorks. NVIDIA PhysX SDK 4.1; NVIDIA GameWorks: Seattle, WA, USA; Available online: https://github.com/NVIDIAGameWorks/PhysX-3.4 (accessed on 28 January 2021).
- Unity Technologies Technical Marketing. Unity Scriptable Render Pipeline; Unity Technologies: San Francisco, CA, USA; Available online: https://github.com/UnityTechnologies/ScriptableRenderPipeline (accessed on 31 January 2021).
- Unity Technologies. Post-Processing Stack v2; Unity Technologies: San Francisco, CA, USA; Available online: https://github.com/Unity-Technologies/PostProcessing (accessed on 31 January 2021).
- Juliani, A.; Berges, V.P.; Teng, E.; Cohen, A.; Harper, J.; Elion, C.; Goy, C.; Gao, Y.; Henry, H.; Mattar, M.; et al. Unity: A General Platform for Intelligent Agents. arXiv 2018, arXiv:1809.02627. [Google Scholar] [CrossRef]
- Samak, T.V.; Samak, C.V. AutoDRIVE–Technical Report. arXiv 2022, arXiv:2211.08475. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; von Stryk, O.; Meyer, J.; Klingauf, U. A Flexible and Scalable SLAM System with Full 3D Motion Estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar] [CrossRef]
- Jaimez, M.; Monroy, J.G.; Gonzalez-Jimenez, J. Planar Odometry from a Radial Laser Scanner. A Range Flow-based Approach. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4479–4485. [Google Scholar] [CrossRef]
- Fox, D. KLD-Sampling: Adaptive Particle Filters. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 3–8 December 2001; Dietterich, T., Becker, S., Ghahramani, Z., Eds.; MIT Press: Cambridge, MA, USA, 2001; Volume 14. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Rösmann, C.; Hoffmann, F.; Bertram, T. Kinodynamic Trajectory Optimization and Control for Car-Like Robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5681–5686. [Google Scholar] [CrossRef]
- Samak, T.V.; Samak, C.V.; Kandhasamy, S. Robust Behavioral Cloning for Autonomous Vehicles Using End-to-End Imitation Learning. SAE Int. J. Connect. Autom. Veh. 2021, 4, 279–295. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Pereira, F., Burges, C., Bottou, L., Weinberger, K., Eds.; Curran Associates, Inc.: New York, NY, USA, 2012; Volume 25. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Sivanathan, K.; Vinayagam, B.K.; Samak, T.; Samak, C. Decentralized Motion Planning for Multi-Robot Navigation using Deep Reinforcement Learning. In Proceedings of the 2020 3rd International Conference on Intelligent Sustainable Systems (ICISS), Thoothukudi, India, 3–5 December 2020; pp. 709–716. [Google Scholar] [CrossRef]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal Policy Optimization Algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar] [CrossRef]
- Samak, C.V.; Samak, T.V.; Kandhasamy, S. Proximally Optimal Predictive Control Algorithm for Path Tracking of Self-Driving Cars. In Proceedings of the Advances in Robotics—5th International Conference of The Robotics Society, AIR2021, Kanpur, Uttar Pradesh, India, 30 June–4 July 2021; pp. 1–5. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Platform/Ecosystem | Cost * | Sensing Modalities | Computational Resources | Actuation Mechanism | Dedicated Simulator | V2X Support | API Support | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Scale | Open Hardware | Open Software | Throttle | Steering | Wheel Encoders | GPS/IPS | IMU | LIDAR | Camera | High-Level | Low-Level | Ackermann Steered | Differetial-Drive/ Skid-Steered | Multi-Agent Support | V2V | V2I | C++ | Python | ROS | MATLAB/Simulink | Webapp | |||
| AutoDRIVE | 1:14 | ✓ | ✓ | $450 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | Jetson Nano | Arduino Nano | ✓ | ★ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ★ | ✓ |
| MIT Racecar | 1:10 | ★ | ✓ | $2600 | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✓ | Jetson TX2 | VESC | ✓ | ✗ | Gazebo | ★ | ★ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| AutoRally | 1:5 | ★ | ✓ | $23,300 | ✗ | ✗ | ✓ | ✓ | ✓ | ✓ | ✓ | Custom | Teensy LC/Arduino Micro | ✓ | ✗ | Gazebo | ★ | ★ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| F1TENTH | 1:10 | ★ | ✓ | $3260 | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | Jetson TX2 | VESC 6MkV | ✓ | ✗ | RViz/Gazebo | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| DSV | 1:10 | ★ | ✓ | $1000 | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ | ✓ | ODROID-XU4 | Arduino (Mega + Uno) | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| MuSHR | 1:10 | ★ | ✓ | $930 | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | Jetson Nano | Turnigy SK8-ESC | ✓ | ✗ | RViz | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| HyphaROS RaceCar | 1:10 | ★ | ✓ | $600 | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ODROID-XU4 | RC ESC TBLE-02S | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| Donkey Car | 1:16 | ★ | ✓ | $370 | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | Raspberry Pi | ESC | ✓ | ✗ | Gym | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ |
| BARC | 1:10 | ★ | ✓ | $1030 | ✗ | ✗ | ✓ | ✗ | ✓ | ✗ | ✓ | ODROID-XU4 | Arduino Nano | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| OCRA | 1:43 | ★ | ✓ | $960 | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ | None | ARM Cortex M4 C | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ | ✓ | ✗ |
| QCar | 1:10 | ✗ | ✗ | $20,000 | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ | ✓ | Jetson TX2 | Proprietary | ✓ | ✗ | Simulink | ✓ | ✓ | ✗ | ★ | ★ | ★ | ✓ | ✗ |
| AWS DeepRacer | 1:18 | ✗ | ✗ | $400 | ✗ | ✗ | ✗ | ✗ | ✓ | ★ | ✓ | Proprietary | Proprietary | ✓ | ✗ | Gym | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ |
| Duckietown | N/A | ✓ | ✓ | $450 | ✗ | ✗ | ★ | ✗ | ★ | ✗ | ✓ | Raspberry Pi/Jetson Nano | None | ✗ | ✓ | Gym | ✓ | ✗ | ★ | ✗ | ✗ | ✓ | ✗ | ✗ |
| TurtleBot3 | N/A | ✓ | ✓ | $590 | ✗ | ✗ | ✓ | ✗ | ✓ | ✓ | ★ | Raspberry Pi | OpenCR | ✗ | ✓ | Gazebo | ★ | ★ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| Pheeno | N/A | ✓ | ✓ | $350 | ✗ | ✗ | ✓ | ✗ | ✓ | ✗ | ✓ | Raspberry Pi | Arduino Pro Mini | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ | ✗ | ✓ | ★ | ✗ | ✗ |
| Autonomy Algorithm | Platform Exploited | Development Framework | Autonomy Stack | Science and Technology Demonstrated | Agents Involved | Sensors Employed | Actuators Controlled |
|---|---|---|---|---|---|---|---|
| Autonomous Parking | AutoDRIVE Testbed | AutoDRIVE ROS Package (Python, C++) | Modular (Perception, Planning and Control) | Teleoperation, SLAM, Probabilistic Map-Based Localization, Global Planning, Local Planning, Motion Control, Static/Dynamic Collision Avoidance | Single-Agent System | LIDAR | Driving Actuators, Steering Actuator |
| Behavioral Cloning | AutoDRIVE Simulator, AutoDRIVE Testbed | AutoDRIVE Python API (Python) | End-to-End (Sensorimotor Policy) | Computer Vision, Deep Imitation Learning, Lane Keeping, Sim2Real Transition | Single-Agent System | Front Camera | Driving Actuators, Steering Actuator |
| Intersection Traversal | AutoDRIVE Simulator | Unity ML-Agents (C#) | End-to-End (Sensorimotor Policy) | V2V Communication, Deep Reinforcement Learning, Dynamic Collision Avoidance, Multi-Agent Cooperation and Coordination | Multi-Agent System | Incremental Encoders, IPS, IMU | Steering Actuator (Constant Throttle) |
| Smart City Management | AutoDRIVE Simulator | AutoDRIVE Webapp API (Python) | Modular (Surveillance, Planning and Control) | V2I Communication, IoT, Centralized Control and Coordination | Single-Agent System | None | Driving Actuators, Steering Actuator |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samak, T.; Samak, C.; Kandhasamy, S.; Krovi, V.; Xie, M. AutoDRIVE: A Comprehensive, Flexible and Integrated Digital Twin Ecosystem for Autonomous Driving Research & Education. Robotics 2023, 12, 77. https://doi.org/10.3390/robotics12030077
Samak T, Samak C, Kandhasamy S, Krovi V, Xie M. AutoDRIVE: A Comprehensive, Flexible and Integrated Digital Twin Ecosystem for Autonomous Driving Research & Education. Robotics. 2023; 12(3):77. https://doi.org/10.3390/robotics12030077
Chicago/Turabian StyleSamak, Tanmay, Chinmay Samak, Sivanathan Kandhasamy, Venkat Krovi, and Ming Xie. 2023. "AutoDRIVE: A Comprehensive, Flexible and Integrated Digital Twin Ecosystem for Autonomous Driving Research & Education" Robotics 12, no. 3: 77. https://doi.org/10.3390/robotics12030077
APA StyleSamak, T., Samak, C., Kandhasamy, S., Krovi, V., & Xie, M. (2023). AutoDRIVE: A Comprehensive, Flexible and Integrated Digital Twin Ecosystem for Autonomous Driving Research & Education. Robotics, 12(3), 77. https://doi.org/10.3390/robotics12030077