
Performance Improvement of Multi-Robot Data Transmission in Aggregated Robot Processing Architecture with Caches and QoS Balancing Optimization

Abstract
:1. Introduction
2. Materials and Methods
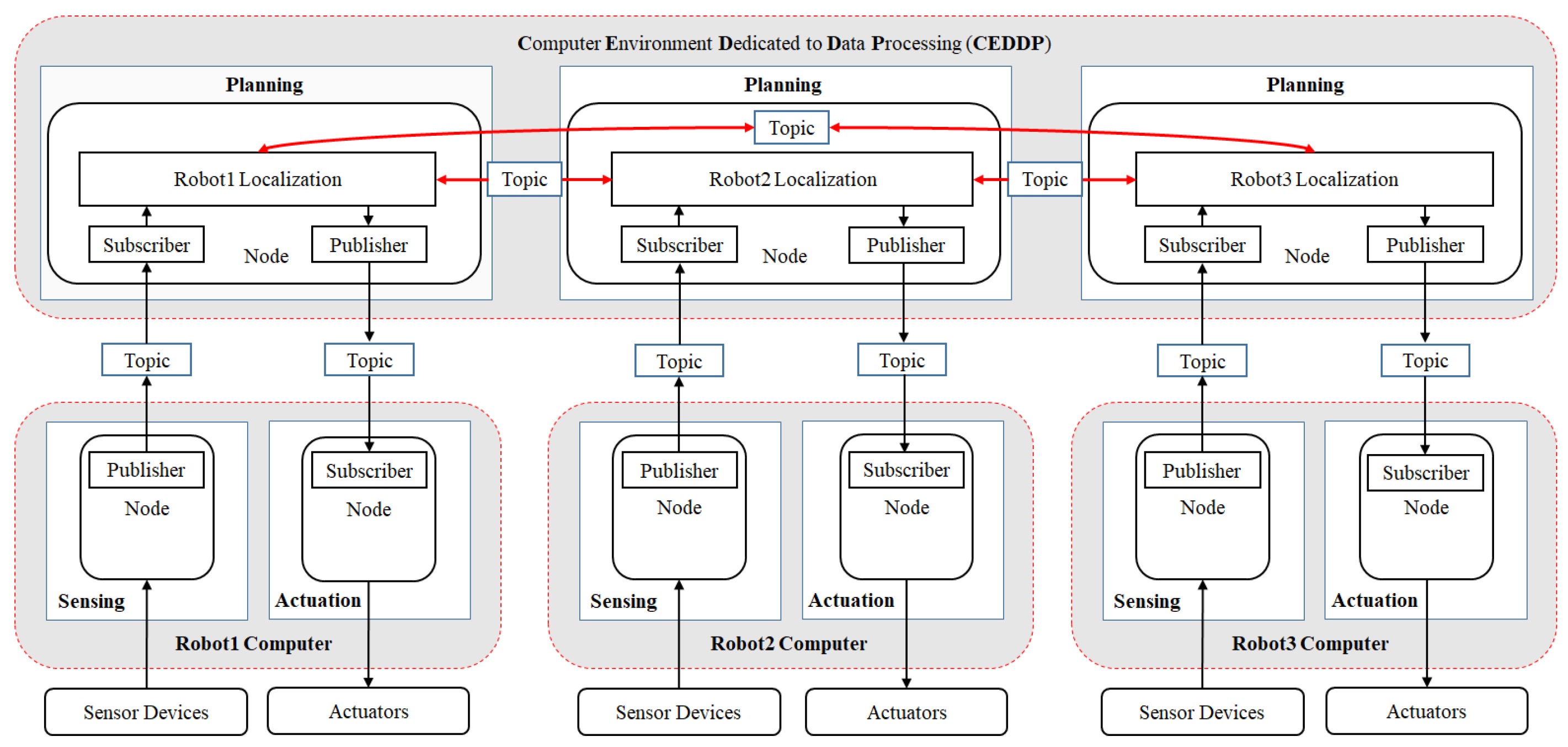
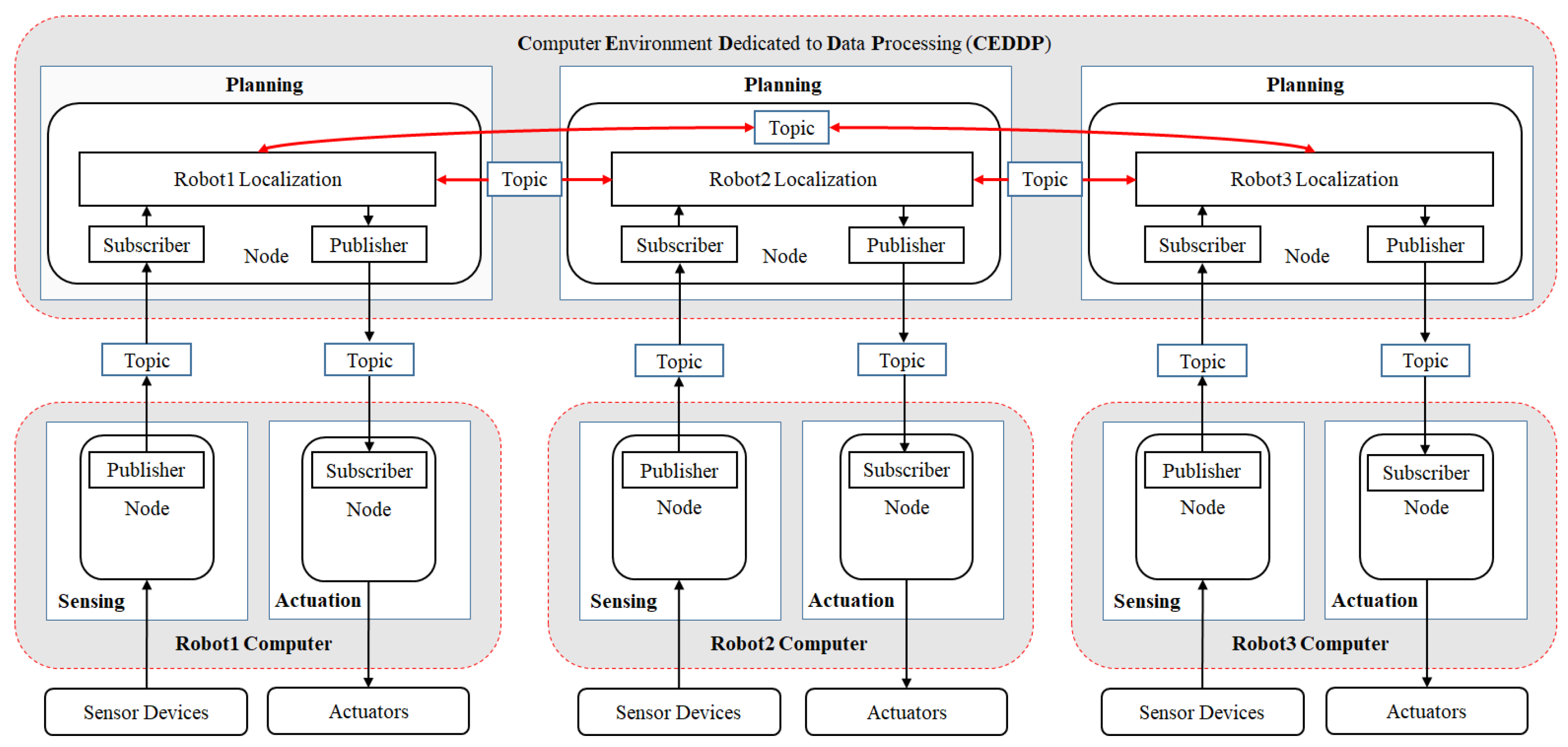
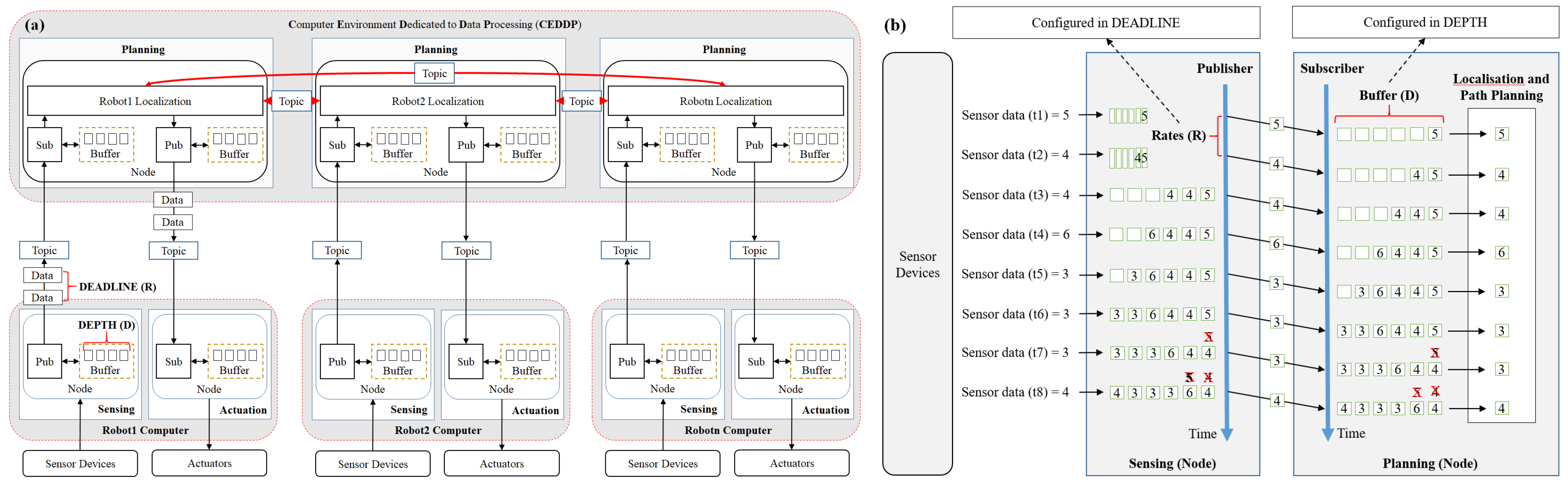
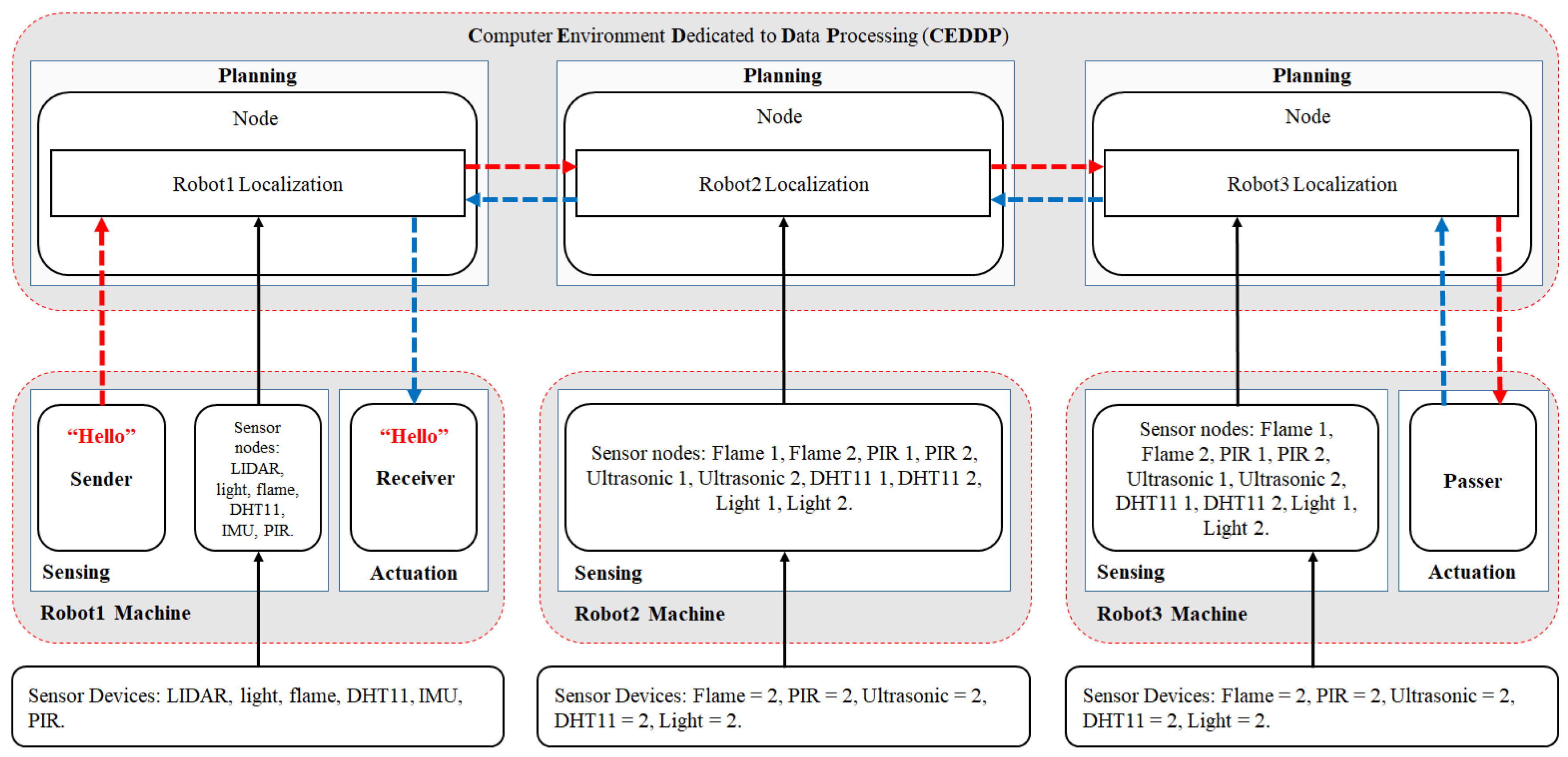
2.1. Aggregated Robot Processing
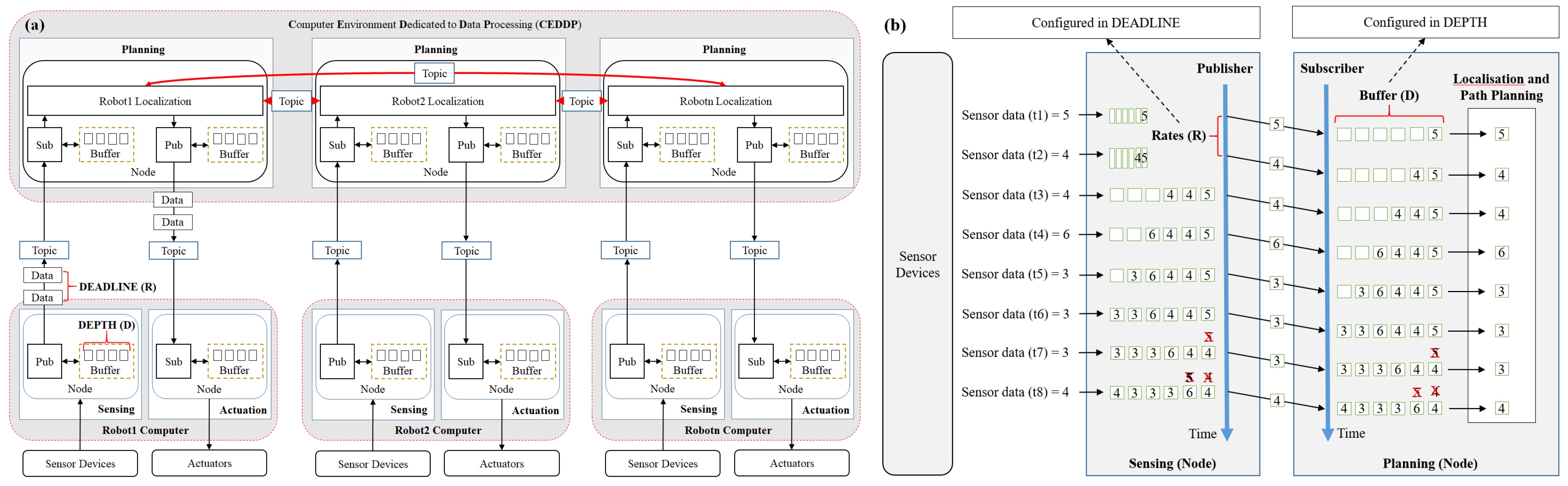
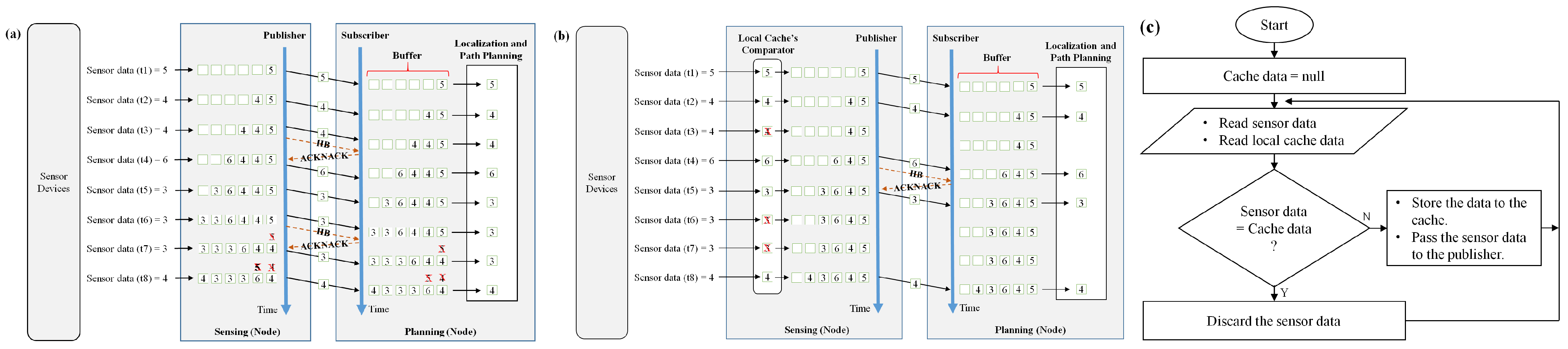
2.2. Local Cache
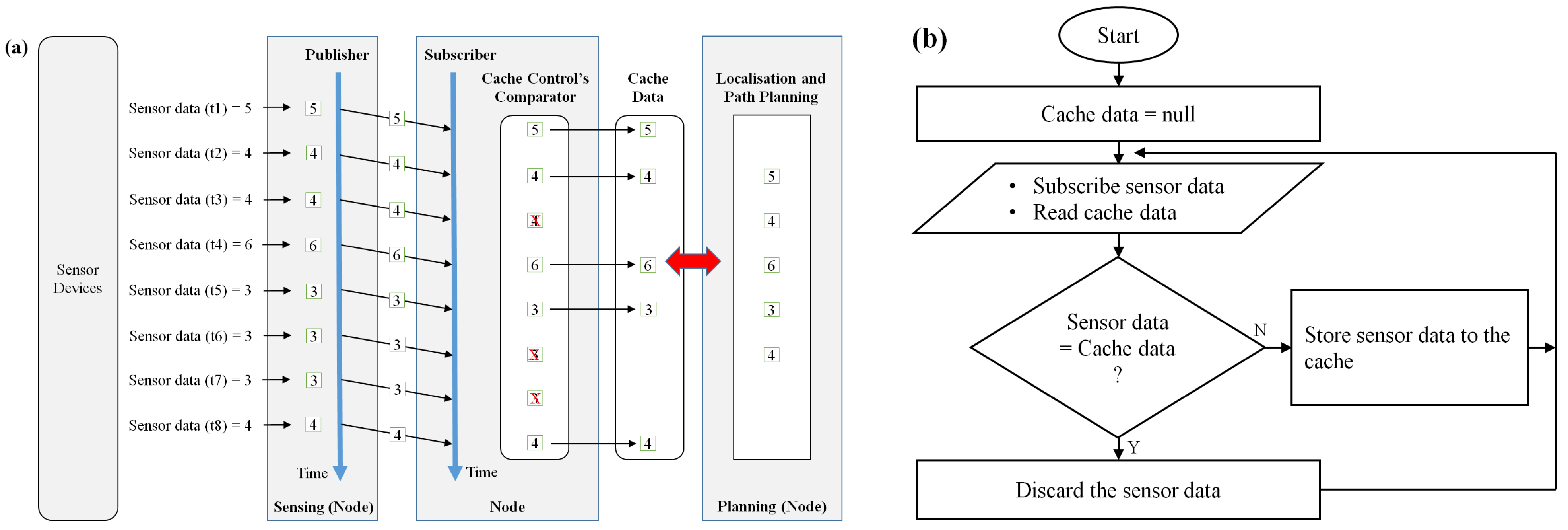
2.3. Cache Control
2.4. QoS Balancing Optimization
3. Results
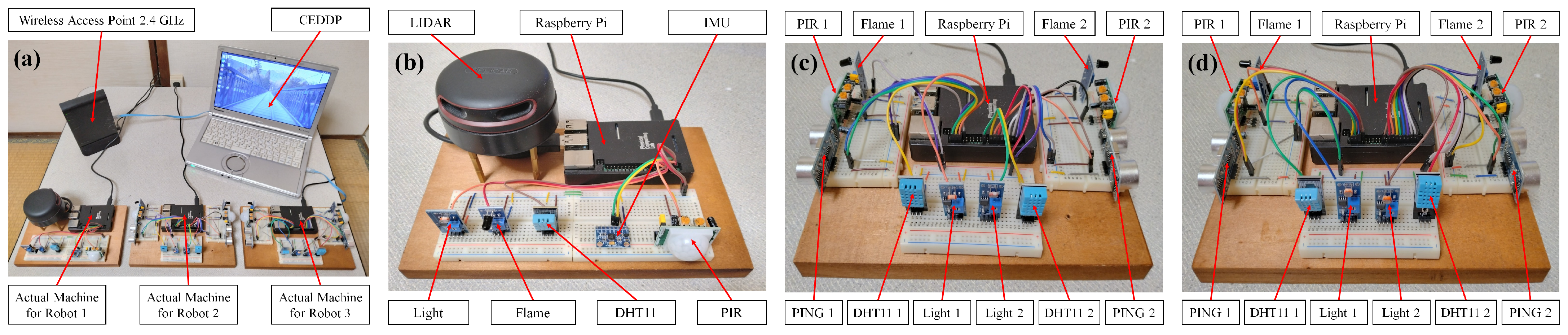
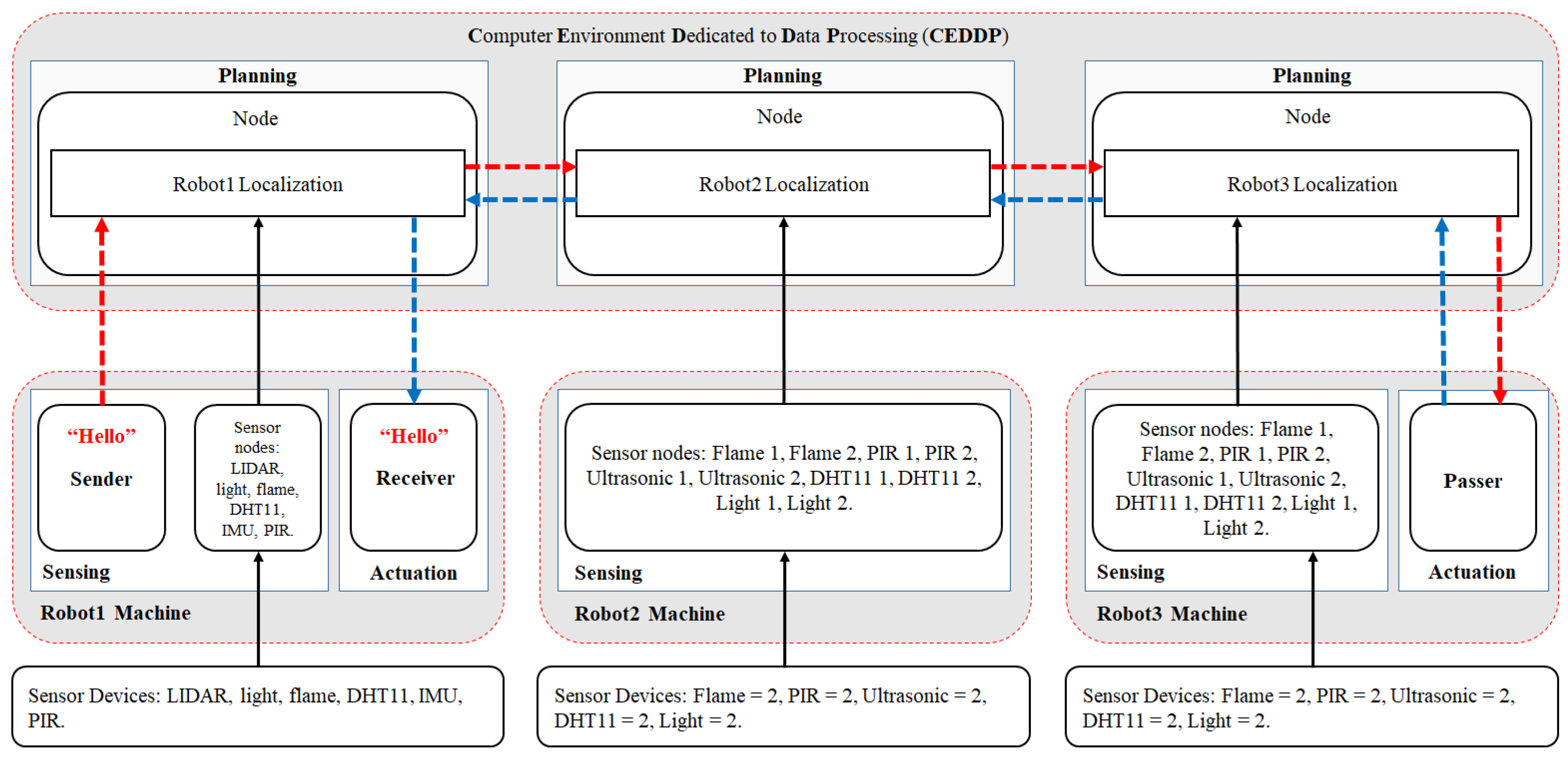
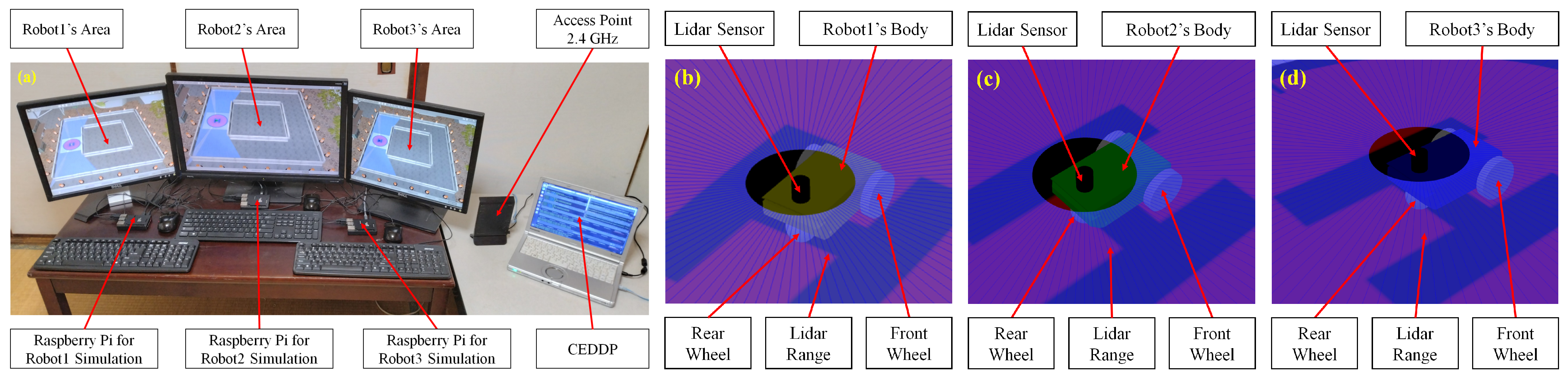
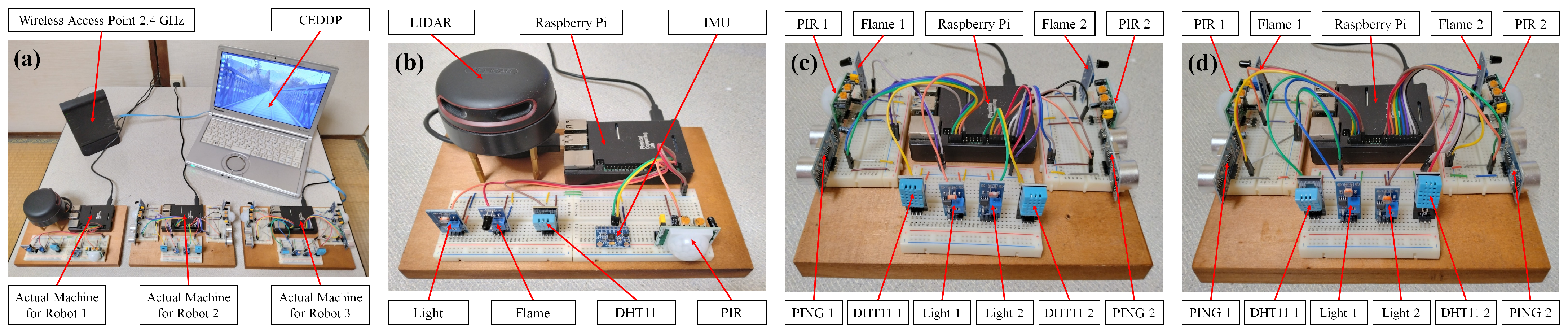
3.1. Experimental Result in Actual Machine
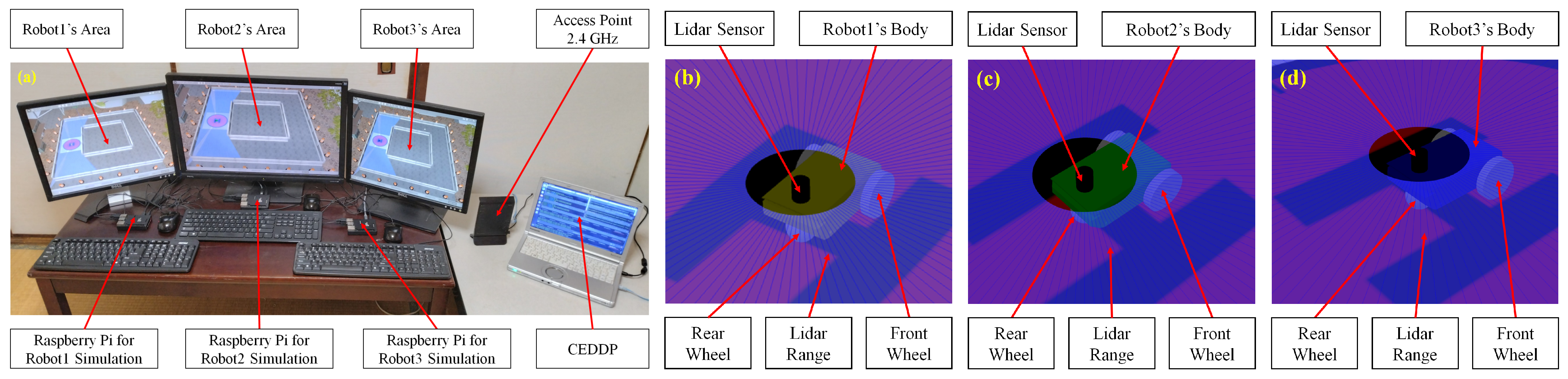
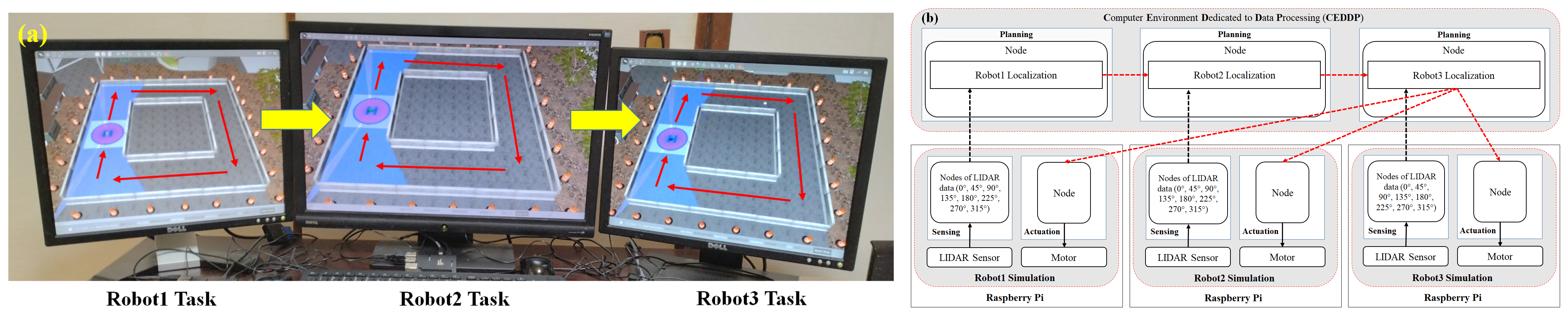
3.2. Experimental Result in Simulation
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ROS 2 | Robot Operating System 2 |
| QoS | Quality of Service |
| ARP | Aggregated Robot Processing |
| RELIABLE | RELIABILITY option to guarantee of sending data sample without fault |
| MRS | Multi-Robot Systems |
| KEEP_LAST | The buffer size to store the data samples configured in DEPTH |
| DEPTH | QoS policy to determine the buffer size in KEEP_LAST option |
| DEADLINE | The rates of data transmission between publisher and subscriber |
| DDS | Data Distribution Service |
| CEDDP | Computer Environment Dedicated to Data Processing |
| ACKNACK | Acknowledgment |
| HB | Heartbeat |
| CVXPY | Python-embedded modeling language for convex optimization problems |
References
- Maruyama, Y.; Kato, S.; Azumi, T. Exploring the Performance of ROS2. In Proceedings of the 2016 International Conference on Embedded Software (EMSOFT), Pittsburgh, PA, USA, 2–7 October 2016. [Google Scholar] [CrossRef] [Green Version]
- Fernandez, J.; Allen, B.; Thulasiraman, P.; Bingham, B. Performance Study of the Robot Operating System 2 with QoS and Cyber Security Settings. In Proceedings of the 2020 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24 August–20 September 2020. [Google Scholar] [CrossRef]
- Chen, Z. Performance Analysis of ROS 2 Networks Using Variable Quality of Service and Security Constraints for Autonomous Systems. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, September 2019. [Google Scholar]
- Jalil, A.; Kobayashi, J. Efficacy of Local Cache for Performance Improvement of Reliable Data Transmission in Aggregated Robot Processing Architecture. In Proceedings of the 2022 22nd International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 27 November–1 December 2022. [Google Scholar] [CrossRef]
- Jalil, A.; Kobayashi, J.; Saitoh, T. Optimization Algorithm for Balancing QoS Configuration in Aggregated Robot Processing Architecture. In Proceedings of the 2023 International Conference on Artificial Life and Robotics (ICAROB2023), Oita, Japan, 9–12 February 2023. [Google Scholar]
- Choi, H.; Xiang, Y.; Kim, H. PiCAS: New Design of Priority-Driven Chain-Aware Scheduling for ROS2. In Proceedings of the 2021 IEEE 27th Real-Time and Embedded Technology and Applications Symposium (RTAS), Nashville, TN, USA, 18–21 May 2021. [Google Scholar] [CrossRef]
- Wang, Y.P.; Tan, W.; Hu, X.Q.; Manocha, D.; Hu, S.M. TZC: Efficient Inter-Process Communication for Robotics Middleware with Partial Serialization. arXiv 2020, arXiv:1810.00556. [Google Scholar] [CrossRef]
- Randolph, C. Improving the Predictability of Event Chains in ROS 2. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 15 March 2021. [Google Scholar]
- Jiang, Z.; Gong, Y.; Zhai, J.; Wang, Y.P.; Liu, W.; Wu, H.; Jin, J. Message Passing Optimization in Robot Operating System. Int. J. Parallel Program. 2020, 48, 119–136. [Google Scholar] [CrossRef]
- Jalil, A.; Kobayashi, J. Experimental Analyses of an Efficient Aggregated Robot Processing with Cache-Control for Multi-Robot System. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020. [Google Scholar] [CrossRef]
- Staschulat, J.; Lütkebohle, I.; Lange, R. The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: Work-in-progress. In Proceedings of the 2020 International Conference on Embedded Software (EMSOFT), Shanghai, China, 20–25 September 2020. [Google Scholar] [CrossRef]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Diamond, S.; Boyd, S. CVXPY: A Python-Embedded Modeling Language for Convex Optimization. J. Mach. Learn. Res. 2016, 17, 2909–2913. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Devices | Sensor Types | Message Types | Data Size (Bytes) |
|---|---|---|---|
| LIDAR | SLAMTEC, A2M8 | Float | 24 |
| Flame | AYNEF, flame module | Boolean | 28 |
| DHT11 | HiLetgo, DHT11 | Float | 24 |
| IMU | KKHMF, MPU-6050 | Float | 24 |
| Ultrasonic | ELEGOO, HC-SR04 | Float | 24 |
| PIR | VKLSVAN, HC-SR501 | String | 59 |
| Light | VKLSVAN, photosensitive | String | 54 |
| QoS Policies | Options |
|---|---|
| RELIABILITY | RELIABLE |
| HISTORY | KEEP_LAST |
| DEPTH | 1, 5, 10, 100, 1000, 5000, Opt (D) |
| DEADLINE | 100 Hz, 200 Hz, 500 Hz, 1000 Hz, Opt (R) |
| DURABILITY | VOLATILE |
| LIVELINESS | AUTOMATIC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jalil, A.; Kobayashi, J.; Saitoh, T. Performance Improvement of Multi-Robot Data Transmission in Aggregated Robot Processing Architecture with Caches and QoS Balancing Optimization. Robotics 2023, 12, 87. https://doi.org/10.3390/robotics12030087
Jalil A, Kobayashi J, Saitoh T. Performance Improvement of Multi-Robot Data Transmission in Aggregated Robot Processing Architecture with Caches and QoS Balancing Optimization. Robotics. 2023; 12(3):87. https://doi.org/10.3390/robotics12030087
Chicago/Turabian StyleJalil, Abdul, Jun Kobayashi, and Takeshi Saitoh. 2023. "Performance Improvement of Multi-Robot Data Transmission in Aggregated Robot Processing Architecture with Caches and QoS Balancing Optimization" Robotics 12, no. 3: 87. https://doi.org/10.3390/robotics12030087
APA StyleJalil, A., Kobayashi, J., & Saitoh, T. (2023). Performance Improvement of Multi-Robot Data Transmission in Aggregated Robot Processing Architecture with Caches and QoS Balancing Optimization. Robotics, 12(3), 87. https://doi.org/10.3390/robotics12030087