2.2. Design Aspects of the Strain-Gauge-Based Torque Sensor
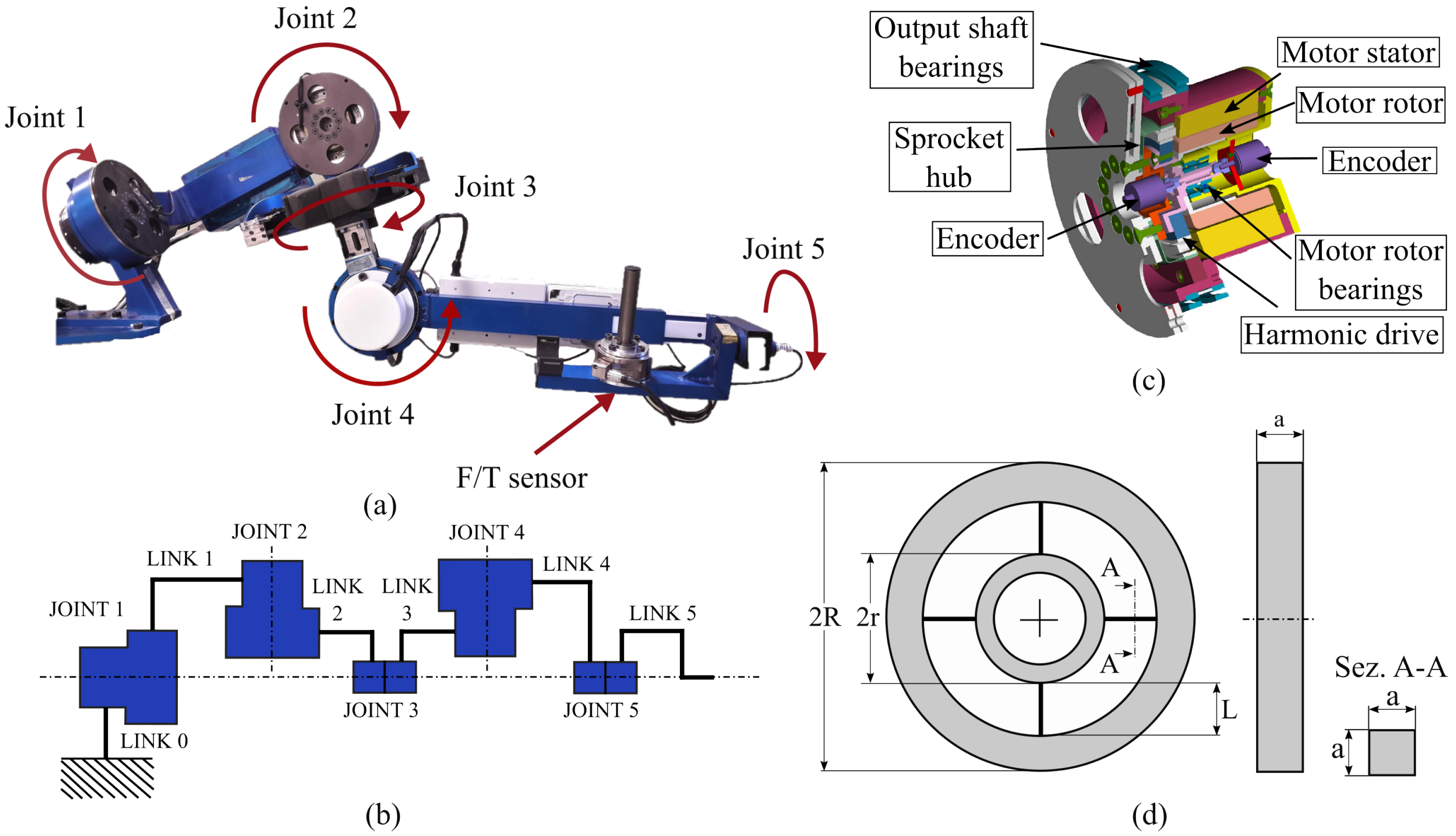
The three joints , and have a torque sensor featuring a four-spoke shape geometry. Despite increasing the actuation group compliance, the embedded torque sensors enable multi-contact force control. Moreover, it allows the implementation of a stable, high-bandwidth torque closed loop around each joint that is weakly affected by the variable inertia of the robot links; suppresses robot vibrations produced by the inherent transmission compliance (harmonic drive); reduces internal disturbance torques caused by the actuator and reducer as, for example, friction losses, actuators torque ripples and gear-teeth-wedging actions; and measures externally applied forces/moments and complex non-linear dynamic interactions between joints and links.
Each sensor embeds two fully balanced strain gauge bridges, located on different beams of the spoke. The sensor is made of AISI 630 steel, a harmonic steel exhibiting a yield strength of 1950 MPa and a Young’s modulus of 196 GPa, and it is designed to exhibit low weight and high sensitivity to axial moments. The axial torsional stiffness of the sensor
is equal to 30 KNm/rad, and it can be computed as in Equation (
1).
where the adimensional parameter
Q is given by the following:
where, according to
Figure 2d,
r is the radius of the internal sensor ring,
L is length of the beams and
a is the side length of the beam section. The characteristic dimensions of the sensor are reported in
Table 2. Moreover, the torsional stiffness of the joint reduced to its output shaft
k is equal to 11.38 KNm/rad.
The position of the strain gauges on the beam is selected according to a trade-off process. By locating them in the middle of the beam, the sensor sensitivity is low, while locating them near the extremities of the beam results in sensor readings being affected by the non-linearities coming from the beam fillets. Taking this into account, the selected distances from the extremities are selected as
and
mm. To estimate the strain of the beam at a given point with distance
p from the inner ring under a certain axial torque
, the normal tension
that acts on that point
p needs to be computed as follows:
and then the strain is computed as follows:
where
E is the Young’s modulus.
Theoretically, i.e., using (
4), at 3 mm from the inner ring and under an axial torque of 120 Nm, a maximum strain of
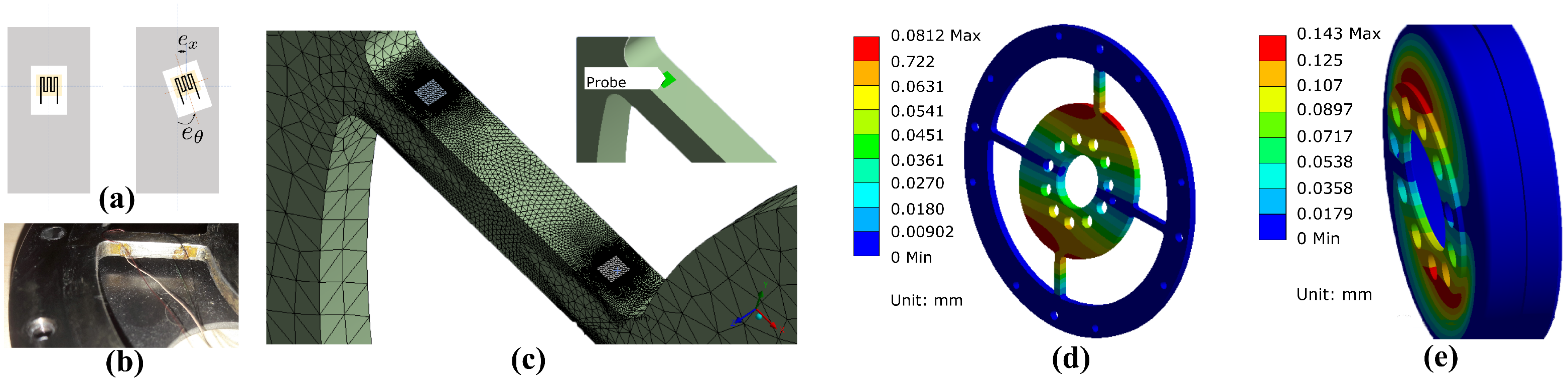
is obtained. The same test is conducted using an FEM software tool (Ansys® v.2019 R3.0) because the surface of the strain gauge is not negligible compared to the beam one (see
Figure 3). The FEM analysis results in a maximum strain of
. The strain of each strain gauge when a 1 Nm load is applied is shown in
Table 3.
An important feature of the torque sensor is represented by the sensitivity to non-axial moments. For this reason, an experimental test is conducted to compute the sensitivity, i.e., predetermined non-axial torque is exerted on the sensor in four configurations (angles) of the sensor. Experimental results are reported in
Table 4, and the obtained sensitivity is equal to the following:
Observing the results in
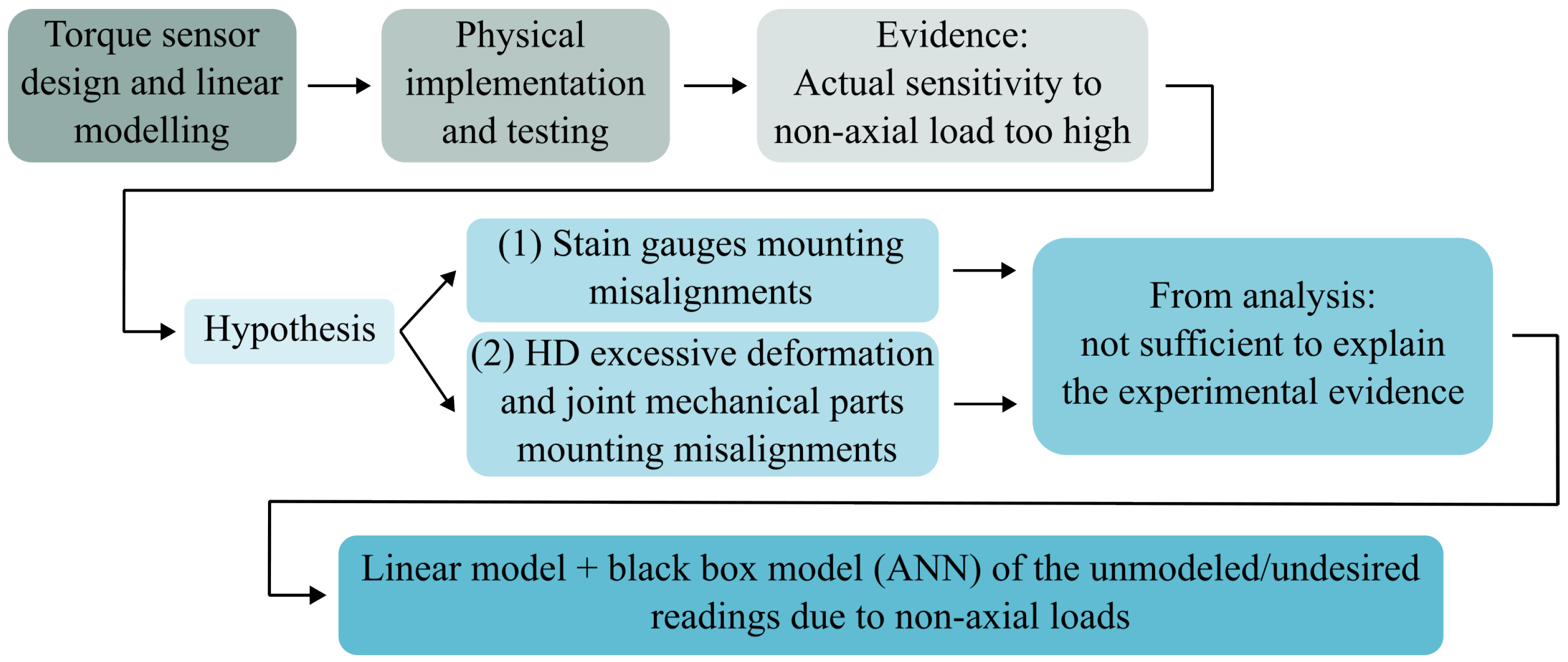
Table 4, it should be noted that the sensitivity to non-axial moments is relatively high if compared to the one mentioned in Ref. [
41]. The issue is investigated according to the steps reported in the roadmap of
Figure 4. Indeed, the correct estimation of the joint torque is crucial for obtaining a high level of transparency of the controlled exoskeleton in all the poses of the workspace. To explain the experimental evidence, two possible reasons (or a combination of them) are proposed: the first cause of error could be represented by a strain gauge mounting misalignment; the second one could be related to an excessive deformation of the sensor due to the non-axial moments. Considering the first hypothesis of error, the sensitivity of the strain gauges to non-axial load
due to strain gauge misalignment—when a flexible model of the HD is considered—can be modeled as follows:
where
is a scaling factor equal to
,
is the sensitivity to linear mounting misalignment, which is equal to 3, and
is the sensitivity to angular mounting misalignment and is equal to
, whereas
and
are the positional and angular misalignment errors, respectively—see
Figure 3a. Equation (
6), together with the measured sensitivity of 0.067, leads to a misalignment error of millimeters and tens of degrees, but these values are higher than the actual misalignment the installation operator may have introduced, as can be seen in
Figure 3b.
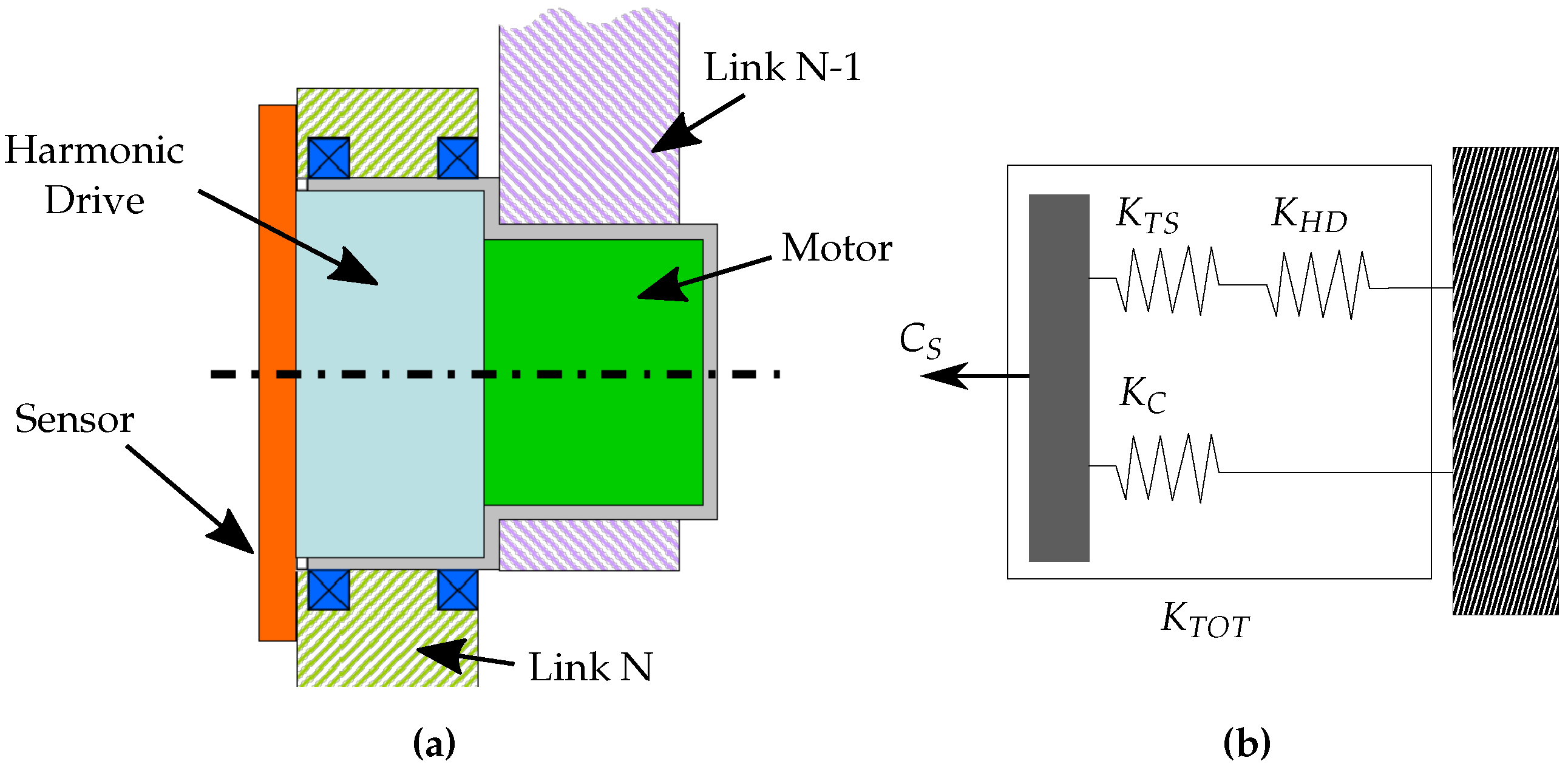
Regarding the second hypothesis, it is worth noticing that the sensor from a structural point of view is in series with the HD, and both of them are in parallel with a couple of bearings. This parallel chain composes a hyper-static system (see
Figure 5); therefore, the excessive sensitivity may be due to the mounting misalignment of the mechanical parts of the chain.
For the study of the hyper-static system, the system parts are supposed to behave in a linear, elastic way, while the system response at non-axial moments is modeled as mono-dimensional. The overall joint stiffness to non-axial moment
is experimentally evaluated, whereas the non-axial moment stiffness of the torque sensor
and the HD
are computed via FEM analysis. The FEM results are depicted in
Figure 3, and the stiffness values are reported in
Table 5.
A possible mounting misalignment of the hyper-static chain may consist of a collinear and/or concentric mounting misalignment between the sensor axis and the bearing axis. In this case, the HD works as a universal joint that connects the sensor—connected to the
link—with the
link. The sensitivity to non-axial moments defined in Equation (
5) and the mechanical properties in
Table 5 lead to a theoretical mounting misalignment of about 0.5 mm. However, this value does not agree with the design tolerances or the data-sheets of the components, from which a misalignment of about 0.05 mm is considered for the worst case.
To summarize, unwanted sensor readings related to non-axial load may be due to the combination of effects from sensor mounting misalignments and HD excessive deformation. In order to minimize this undesired effect, we adopt a model-free adaptive method based on Artificial Neural Networks (ANNs) to characterize and compensate this non-linear response of the sensors. This proposal represents an alternative method to modeling approaches, and the choice is justified by the complexity of the phenomenon.
Considering the ideal and linear response of the sensor, the torque readings can be expressed as follows:
where
v is the measured voltage tension, and
represents the voltage constant of the torque sensor. In a real case, it is possible to write the following:
where
is the non-linear influence on the sensor readings due to the mounting and non-axial loads. By experimental evidence, it is possible to assert that the term
varies in a non-linear way with respect to the exoskeleton pose (joint angles) and load. The mounting errors influence the torque readings in a non-linear way with respect to the joint angle, whereas the non-axial torques depend partially on the interaction with the human user and partially on the dynamics and gravitational torques acting on the considered joint. For all three sensors, the
constants are experimentally evaluated. In order to minimize the effect of non-linear, undesired term
, an ANN is involved in the process, with seven neurons in the hidden layer and sigmoid activation function. The goal is to estimate the error basing on the four angles and load on each axis. The angular information is useful for inferring the assembly error component, whereas, for the load influence, the gravitational torque is used. To train the neural network, the whole workspace is partitioned into 414 target points. The torque sensor readings are acquired while the exoskeleton is holding the target position. For each joint, the training is performed using the four angles and the gravity torque acting on the joint (and computed by the model) as input data, whereas the output is represented by the residual
as follows:
where
represents the gravity load on the
i-th joint when the pose is given by the angle vector
. The set of target points is divided into three parts: 70% for the training set, 20% for the validation set and 10% for the test set. The regression value between the ANN output and the target points is 0.99.
The actual sensor torque estimation
is computed as follows:


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}