
Quadruped Robots: Bridging Mechanical Design, Control, and Applications

 ,
,  ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. Research Methodology
2.1. Research Questions
- RQ1
- How have quadruped robots evolved over time, and what are the major technological milestones?
- RQ2
- What are quadruped robots’ fundamental design principles, control mechanisms, and perception systems?
- RQ3
- How do quadruped robots integrate artificial intelligence and machine learning to enhance autonomy and adaptability?
- RQ4
- What are the key applications of quadruped robots across industries, and what challenges hinder their broader adoption?
- RQ5
- What are the challenges, future directions, and potential research areas for advancing quadruped robotics?
2.2. Search Strategy
2.3. Eligibility Criteria
- Inclusion Criteria
- Studies published in peer-reviewed journals, conference proceedings, or reputable industry reports.
- Research works published within the last 20 years (2005–2025), ensuring coverage of recent technological advancements.
- Papers explicitly addressing quadruped robots, including mechanical design, locomotion control, perception systems, and applications.
- Studies discussing artificial intelligence and machine learning applications in quadruped robotics.
- Comparative studies and surveys providing insights into historical and emerging trends in quadruped robotics.
- Exclusion Criteria
- Papers focusing solely on bipedal, hexapod, or wheeled robots, unless they provided relevant insights applicable to quadruped robotics.
- Studies published in languages other than English unless a reliable translation was available.
- Articles with insufficient technical details, such as abstracts or brief conference posters.
- Duplicates or redundant studies presenting similar results without significant new contributions.
2.4. Study Selection
3. Historical Evolution of Quadruped Robots
3.1. Comparative Perspectives with Other Legged Systems
3.2. Early Developments
3.3. Technological Milestones
3.4. Trends in Design and Application
3.5. Main of Evolution Trends
- Technological Advancements: Improvements in actuators, sensors, computing power, and AI have enabled quadruped robots to become more autonomous, efficient, and capable.
- Application Expansion: Initially focused on research and military applications, quadruped robots now serve in industrial inspection, healthcare, entertainment, and public safety.
- Commercialization and Accessibility: The entry of companies such as Boston Dynamics and Unitree Robotics into the commercial market has made quadruped robots more accessible to businesses and researchers.
- Biomimicry and Design Optimization: Drawing inspiration from animal locomotion has led to more adaptable and efficient robot designs.
4. Design Principles and Architecture
- High-Level Control and Planning: This layer hosts the global mission logic, consisting of the gait scheduler, path planner, and task planner. It streams abstract commands (desired body velocity, foothold sequence, torque budgets) downwards to the central controller, while status and fault flags are fed back upwards for online replanning.
- Central Controller/CPU: Acting as the “nervous center”, the CPU fuses raw proprioceptive and exteroceptive data, allocates power, and generates low-level joint setpoints. Because the CPU mediates all inter-subsystem traffic, the double-headed arrows emphasize the closed-loop nature of sensing–control–actuation.
- Actuation, Sensing, and Power Subsystems:
- -
- Actuation converts joint commands into forces through motors, hydraulics, or series-elastic actuators (SEAs).
- -
- Sensing aggregates internal feedback (encoders, IMUs, force/torque sensors) with external perception (RGB-D cameras, LiDAR) to estimate state and terrain.
- -
- Power Management regulates energy flow from batteries, fuel cells, or hybrid packs and reports real-time power budgets to the CPU.
The curved arrows between each of these blocks and the mechanical structure signify that torque, sensor contact forces, and energy are exchanged directly with the robot body, while corresponding measurements return to their respective controllers. - Mechanical Structure: The integrated chassis and four articulated legs form the physical interface to the environment. Loads, impacts, and terrain irregularities originate here and propagate upward via sensors to influence both actuator commands and high-level planning.
4.1. Mechanical Design
4.1.1. Leg Configurations, Foot Design, and Kinematics
- Articulated Legs: These legs mimic the biological joints of animals, typically consisting of hip, knee, and ankle joints. Articulated legs provide greater flexibility and allow for complex multi-joint movements, improving the robot’s ability to navigate uneven terrain. The MIT Cheetah (see Figure 6a), for instance, employs articulated legs that allow for high-speed running and dynamic maneuvers [44].
- Compliant Legs: These legs integrate elastic elements to absorb shocks and store elastic energy, enhancing energy efficiency and reducing mechanical stress during operation. Robots such as RHex (see Figure 6b) demonstrate the effectiveness of compliant legs in traversing rough terrains, with the ability to minimize impact forces and increase robustness [45].
- Rigid Legs: Early quadruped robots often used rigid legs (see Figure 1), focusing on basic locomotion. While easier to control, rigid legs are less adaptable to uneven surfaces than articulated or compliant legs. However, modern innovations in control algorithms have slightly mitigated these limitations in more recent designs [46].
4.1.2. Actuation Systems
- Electric Motors: In particular, brushless DC motors are widely used for their precision and controllability. Robots such as ANYmal use electric actuators to achieve fine motion control while maintaining a compact design [52]. These actuators are energy-efficient and well-suited for indoor and research environments where noise and precision are key considerations.
- Hydraulic Actuators: These are known for their high power density, and are typically used in larger quadruped robots that require significant force output. However, hydraulic systems are generally heavier and less energy-efficient. Boston Dynamics’ BigDog, for example, employs hydraulic actuators to achieve robust performance on rough terrain despite the tradeoffs in weight and complexity [12].
- Series Elastic Actuators (SEAs): These incorporate an elastic element between the motor and load, which improves force control and shock tolerance. They are commonly used in dynamic robots such as the MIT Cheetah for better energy efficiency and impact handling, allowing the robot to absorb shocks and conserve energy during gait cycles [44].
4.1.3. Materials and Structural Design
- Lightweight Metals: Aluminum and titanium alloys are widely used due to their high strength-to-weight ratios. Aluminum is preferred for structural components in environments where cost and ease of manufacturing are important, while titanium is more suitable for extreme conditions due to its superior strength and corrosion resistance [54,55].
- Composites: Carbon fiber composites are frequently used in high-performance robots such as the MIT Cheetah, providing an excellent strength-to-weight ratio. Although more expensive, composites allow for complex shapes and reduce the robot’s overall weight, enhancing its dynamic capabilities [34].
- Polymers: High-strength polymers are commonly used for non-load-bearing components or protective enclosures. Advanced polymers, e.g., reinforced nylon, can balance weight and mechanical properties for specific structural elements [56].
4.2. Sensory Systems
4.2.1. Internal Sensors (Proprioception)
- Incremental Rotary Encoders: Encoders [59] measure joint angles and rotational speeds, enabling precise motion control. They are typically installed on each joint actuator to provide real-time feedback on the position and velocity of joints. High-resolution encoders improve the accuracy of kinematic calculations and are essential for tasks requiring fine manipulation or precise foot placement.
- Force/Torque Sensors: These sensors [60] detect forces and torques at joints or contact points, aiding in balance and interaction with objects. By measuring the interaction forces between the robot and the environment, force/torque sensors enable compliance control, which allows the robot to adjust its movements in response to external forces. This is particularly important for tasks involving physical contact, such as climbing stairs or handling objects.
- Inertial Measurement Units (IMUs): IMUs [61] provide data on orientation, acceleration, and angular velocity, crucial for maintaining balance and posture. They typically combine accelerometers, gyroscopes, and sometimes magnetometers to estimate the robot’s attitude and motion. The data from IMUs is used in state estimation algorithms to correct for drift and improve the accuracy of the robot’s pose estimation.
4.2.2. External Sensors (Exteroception)
- LiDAR (Light Detection and Ranging): LiDAR sensors [62] generate precise 3D maps of the environment by emitting laser pulses and measuring the time required for the reflections to return. This technology enables high-resolution spatial awareness, which is essential for navigation and obstacle avoidance in complex terrains. LiDAR is particularly useful in low-light conditions where cameras may be less effective.
- Cameras: Cameras [5,6,7] capture visual information that is useful for object recognition, terrain assessment, and Simultaneous Localization and Mapping (SLAM). Stereo cameras provide depth information by comparing images from two slightly offset lenses, while monocular cameras rely on visual cues and algorithms to estimate depth. RGB-D cameras combine traditional RGB data with depth information, providing more comprehensive environmental understanding. Advanced computer vision techniques, including Convolutional Neural Networks (CNNs), are employed to process camera data for tasks such as semantic segmentation and object detection.
- Ultrasonic Sensors: Ultrasonic sensors [63] measure distances to nearby objects using sound waves. They are cost-effective and useful for short-range obstacle detection. However, their resolution and accuracy are lower compared to LiDAR and cameras. Ultrasonic sensors are often used as supplementary sensors to provide redundancy and enhance safety.
- Tactile Sensors: Tactile sensors [64] detect contact forces and textures, enhancing interaction capabilities. These sensors can be placed on the robot’s feet or manipulator to provide feedback during physical interactions. Tactile sensing enables the robot to adjust its grip on objects, detect slippage, and perform delicate tasks that require force control.
- GPS (Global Positioning System): For outdoor navigation, GPS [65] provides global position information. While GPS lacks the precision needed for fine control, it is useful for high-level navigation tasks, such as moving to a specific location in open environments.
- Infrared Sensors: Infrared (IR) sensors [66] can detect heat signatures and are useful for applications such as search and rescue, where locating warm bodies is critical.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Advantages | Limitations | Typical Use Cases |
|---|---|---|---|
| Internal Sensors (Proprioception) | |||
| Incremental Rotary Encoders [59] | Real-time joint position and velocity feedbackHigh resolution for precise motion control | Measure only rotational motion (no external feedback)Require careful calibration and installation | Joint angle measurementFine manipulation or precise foot placement |
| Force-Torque Sensors [60] | Measure contact forces and joint torquesEnable compliance control for safe interactions | Often expensive; prone to noise or drift if not calibratedInstallation can be mechanically complex | Balance and disturbance rejectionStair climbing, object handlingAny task requiring force feedback |
| Inertial Measurement Units (IMUs) [61] | Provide orientation, acceleration, and angular velocityCompact and reliable | Accumulative drift over timeNo direct perception of external environment | Robot posture control and stabilizationState estimation (sensor fusion) |
| External Sensors (Exteroception) | |||
| LiDAR (Light Detection and Ranging) [62] | High-resolution 3D mappingOperates well in low-light conditionsPrecise distance measurements | High costPerformance degradation in rain, fog, or reflective surfaces | Autonomous navigation, obstacle avoidance3D mapping in industrial or outdoor settings |
| Cameras (Monocular, Stereo, RGB-D) [5,6,7,67,68,69,70,71,72,73] | Rich visual informationEnables object recognition and SLAMRGB-D offers combined color + depth data | Monocular lacks direct depthSensitive to lighting changes and occlusionsRGB-D sensors often have limited range | Visual SLAM, semantic segmentation, object detectionTerrain assessment and obstacle avoidance |
| Ultrasonic Sensors [63] | Low costEffective for short-range obstacle detection | Limited resolutionUnsuitable for detailed mapping or complex environments | Proximity sensingRedundant safety checks |
| Tactile Sensors [64] | Detect contact forces, textures, and slippageEnhance manipulation capabilities | Typically short-range or surface-level feedback onlyIntegration can be mechanically challenging | Precise object handlingSlip detectionForce-based exploration |
| GPS (Global Positioning System) [65] | Provides global position in open outdoor areasUseful for high-level navigation | Ineffective indoors or with obstructed satellitesLimited precision for fine control | Outdoor path planning, waypoint navigationLarge-scale field operations |
| Infrared (Thermal) Sensors [66] | Capable of detecting heat signaturesUseful in low-visibility scenarios | Sensitive to thermal noise or reflective surfacesLimited structural information | Search and rescue (locating warm bodies)Nighttime or smoke-filled environment navigation |
4.3. Power and Energy Management
4.3.1. Power Sources
- Batteries: Lithium-ion batteries [74,75] are commonly used due to their high energy density and rechargeability. They are suitable for robots requiring moderate power for extended periods. Battery technology advancements have led to lighter and more efficient energy storage solutions. For example, the Boston Dynamics Spot [38] robot uses rechargeable lithium-ion batteries, providing about 90 min of operation per charge.
- Fuel Cells: Fuel cells [76,77,78] offer higher energy densities and longer operation times but are less common due to cost and complexity. They generate electricity through chemical reactions, typically using hydrogen. Fuel cells [78] are suitable for applications requiring long-duration missions without the possibility of recharging, such as remote exploration.
- Hybrid Systems: Hybrid power systems [79,80,81] combine different power sources such as batteries and supercapacitors to handle varying power demands. Supercapacitors can deliver high-power bursts for dynamic movements, while batteries provide steady energy for regular operation. Hybrid systems aim to optimize energy efficiency and extend operational time.
4.3.2. Energy Efficiency Strategies
- Regenerative Braking: This technique [82] recovers energy during the deceleration phases. When the robot’s joints slow down or stop moving, the kinetic energy is converted back into electrical energy and stored into the battery. Regenerative systems [83] are more common in electrically actuated robots.
- Energy-Efficient Gaits: Optimizing locomotion patterns reduces energy consumption [84,85]. Researchers can study animal locomotion to develop gaits that minimize energy expenditure [86]. For instance, using passive dynamics and exploiting the robot’s natural dynamics can lead to more efficient movement [87,88].
- Adaptive Control Systems: These systems adjust power usage based on task requirements and environmental conditions [89]. For example, reducing movement speed or disabling non-essential sensors [84] when battery levels are low. Intelligent power management algorithms balance performance with energy consumption.
- Lightweight Design: Reducing the robot’s weight through material selection and structural optimization decreases the energy required for movement [55]. As discussed in the mechanical design section, lighter robots consume less power for the same tasks.
4.4. Integration of Systems
- Modularity: Designing components that can be easily replaced or upgraded enhances maintainability and adaptability [92,93]. Modular design allows for rapid prototyping and testing of different subsystems without affecting the entire system. For example, the ANYmal robot [39] utilizes a modular approach in which each leg can be detached and serviced independently, reducing downtime and facilitating upgrades.
- Weight Distribution: Proper weight balance is crucial for stability and efficient locomotion. The distribution of mass affects the robot’s center of gravity, which in turn influences balance and agility [94,95]. Engineers must carefully design the placement of heavy components such as batteries and actuators to optimize performance, and users should also pay attention to the placement of payloads. Computational tools and simulations are often used to analyze the effects of weight distribution on dynamic behavior.
- Communication Networks: Reliable and fast data exchange between sensors, actuators, and control units is essential for real-time operation [96]. Communication protocols must support high data rates with minimal latency to ensure timely processing of sensor inputs and execution of control commands. Common communication interfaces include CAN bus, ethernet, and wireless networks for remote operation. The integration of distributed control systems requires robust synchronization and error-handling mechanisms [97].
- Software Architecture: A well-designed software framework is critical for integrating various algorithms, from low-level motor control to high-level decision-making. Middleware platforms such as the Robot Operating System (ROS) [98,99] provide standardized interfaces and tools for developing modular and reusable software components. This facilitates collaboration and scalability, allowing developers to focus on specific functionalities without redefining common processes.
- Power Management: Coordinating power distribution among different subsystems is vital to prevent overloads and ensure efficiency. Power management systems monitor energy consumption, control voltage levels, and protect against faults. Intelligent power allocation can prioritize critical functions during low-power conditions, enhancing the robot’s operational resilience.
- Thermal Management: Heat generated by actuators, processors, and other electronics must be effectively dissipated to maintain optimal performance. Thermal management strategies include heat sinks, fans, and thermal interface materials. In some designs, the robot’s structure is used to conduct heat away from sensitive components [100].
- Safety Systems: Integration of safety features such as emergency stop mechanisms [101], collision detection, and compliance control is essential for operating in environments with humans or delicate equipment. Redundant systems and failsafes help to prevent accidents resulting from component failures or unexpected conditions.
5. Perception, Sensing, and Environment Interaction
5.1. Environmental Mapping and Sensing
5.1.1. Simultaneous Localization and Mapping (SLAM)
5.1.2. Terrain Perception and Classification
5.2. Object Recognition and Interaction
5.2.1. Visual Recognition Systems
5.2.2. Manipulation Capabilities
5.3. Obstacle Detection and Avoidance
5.3.1. Sensor Modalities for Obstacle Detection
5.3.2. Path Planning Algorithms
5.4. Human-Robot Interaction
5.4.1. Communication Interfaces
5.4.2. Safety and Ethical Considerations
5.5. Enhancing Perception and Decision-Making in Robotics
5.5.1. Deep Learning Techniques
5.5.2. Adaptive Behaviors
5.5.3. Embodiment and Bio-Inspired Architectures
6. Applications Across Industries
6.1. Military and Defense
6.2. Search and Rescue Operations
6.3. Industrial Inspection and Maintenance
6.4. Agriculture and Farming
6.5. Entertainment and Service Industries
6.6. Healthcare
6.7. Environmental Monitoring and Conservation
6.8. Construction and Infrastructure
6.9. Mining
6.10. Space Exploration
6.11. Robots for Cultural Heritage Conservation and Archaeology
7. Challenges and Limitations
7.1. Technical Challenges
7.1.1. Terrain Adaptability
7.1.2. Energy Consumption and Autonomy
7.1.3. Robustness and Reliability
7.1.4. Complexity of Control Systems
7.2. Ethical and Social Considerations
7.2.1. Safety Concerns
7.2.2. Privacy and Surveillance
7.2.3. Job Displacement
7.3. Regulatory and Legal Frameworks
7.3.1. Lack of Standards
7.3.2. International Variations
7.4. Cost and Accessibility
7.4.1. High Development and Production Costs
7.4.2. Limited Accessibility for Research and Education
7.5. Environmental Impact
7.5.1. Energy Consumption
7.5.2. Wildlife Disturbance
7.6. Security Vulnerabilities
7.6.1. Cybersecurity Risks
7.6.2. Dependence on Communication Networks
8. Future Perspectives and Research Directions
8.1. Advancements in Artificial Intelligence and Machine Learning
8.2. Integration of Soft Robotics
8.3. Enhanced Human–Robot Interaction
8.4. Swarm Robotics and Collaborative Behaviors
8.5. Advancements in Materials and Fabrication
8.6. Energy Efficiency and Power Management
8.7. Regulatory Development and Standardization
8.8. Commercialization and Market Trends
8.9. Interdisciplinary Research and Collaboration
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siciliano, B.; Khatib, O.; Kröger, T. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 200. [Google Scholar]
- Dong, M.; Zhou, Y.; Li, J.; Rong, X.; Fan, W.; Zhou, X.; Kong, Y. State of the art in parallel ankle rehabilitation robot: A systematic review. J. NeuroEng. Rehabil. 2021, 18, 52. [Google Scholar] [CrossRef] [PubMed]
- Kashef, S.R.; Amini, S.; Akbarzadeh, A. Robotic hand: A review on linkage-driven finger mechanisms of prosthetic hands and evaluation of the performance criteria. Mech. Mach. Theory 2020, 145, 103677. [Google Scholar] [CrossRef]
- Niku, S.B. Introduction to Robotics: Analysis, Control, Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Pachidis, T.P.; Lygouras, J.N. Pseudostereo-vision system: A monocular stereo-vision system as a sensor for real-time robot applications. IEEE Trans. Instrum. Meas. 2007, 56, 2547–2560. [Google Scholar] [CrossRef]
- Sleaman, W.K.; Hameed, A.A.; Jamil, A. Monocular vision with deep neural networks for autonomous mobile robots navigation. Optik 2023, 272, 170162. [Google Scholar] [CrossRef]
- Huang, H.; Li, L.; Cheng, H.; Yeung, S.K. Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular Stereo and RGB-D Cameras. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024; pp. 21584–21593. [Google Scholar]
- Guo, J.; Nguyen, H.T.; Liu, C.; Cheah, C.C. Convolutional neural network-based robot control for an eye-in-hand camera. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4764–4775. [Google Scholar] [CrossRef]
- Coll-Ribes, G.; Torres-Rodríguez, I.J.; Grau, A.; Guerra, E.; Sanfeliu, A. Accurate detection and depth estimation of table grapes and peduncles for robot harvesting, combining monocular depth estimation and CNN methods. Comput. Electron. Agric. 2023, 215, 108362. [Google Scholar] [CrossRef]
- Kinasih, F.M.T.R.; Machbub, C.; Yulianti, L.; Rohman, A.S. Two-stage multiple object detection using CNN and correlative filter for accuracy improvement. Heliyon 2023, 9, e12716. [Google Scholar] [CrossRef]
- Liu, Y. Advancements, challenges, and future perspectives in quadruped robots: A survey. Appl. Comput. Eng. 2024, 78, 10–16. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. Bigdog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Gans, N.R.; Rogers, J.G. Cooperative multirobot systems for military applications. Curr. Robot. Rep. 2021, 2, 105–111. [Google Scholar] [CrossRef]
- Murphy, R.R. Disaster Robotics; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Doroodgar, B.; Ficocelli, M.; Mobedi, B.; Nejat, G. The search for survivors: Cooperative human-robot interaction in search and rescue environments using semi-autonomous robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2858–2863. [Google Scholar]
- Solmaz, S.; Innerwinkler, P.; Wójcik, M.; Tong, K.; Politi, E.; Dimitrakopoulos, G.; Purucker, P.; Höß, A.; Schuller, B.W.; John, R. Robust robotic search and rescue in harsh environments: An example and open challenges. In Proceedings of the 2024 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Chemnitz, Germany, 20–21 June 2024; pp. 1–8. [Google Scholar]
- Bensaci, C.; Zennir, Y.; Pomorski, D.; Innal, F.; Lundteigen, M.A. Collision hazard modeling and analysis in a multi-mobile robots system transportation task with STPA and SPN. Reliab. Eng. Syst. Saf. 2023, 234, 109138. [Google Scholar] [CrossRef]
- Surmann, H.; Slomma, D.; Grobelny, S.; Grafe, R. Deployment of Aerial Robots after a major fire of an industrial hall with hazardous substances, a report. In Proceedings of the 2021 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), New York City, NY, USA, 25–27 October 2021; pp. 40–47. [Google Scholar]
- He, J.; Gao, F. Mechanism, actuation, perception, and control of highly dynamic multilegged robots: A review. Chin. J. Mech. Eng. 2020, 33, 1–30. [Google Scholar] [CrossRef]
- Biswal, P.; Mohanty, P.K. Development of quadruped walking robots: A review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar] [CrossRef]
- Wang, J.; Chen, W.; Xiao, X.; Xu, Y.; Li, C.; Jia, X.; Meng, M.Q.H. A survey of the development of biomimetic intelligence and robotics. Biomim. Intell. Robot. 2021, 1, 100001. [Google Scholar] [CrossRef]
- Yao, L.; Yu, H.; Lu, Z. Design and driving model for the quadruped robot: An elucidating draft. Adv. Mech. Eng. 2021, 13, 16878140211009035. [Google Scholar] [CrossRef]
- Chai, H.; Li, Y.; Song, R.; Zhang, G.; Zhang, Q.; Liu, S.; Hou, J.; Xin, Y.; Yuan, M.; Zhang, G.; et al. A survey of the development of quadruped robots: Joint configuration, dynamic locomotion control method and mobile manipulation approach. Biomim. Intell. Robot. 2022, 2, 100029. [Google Scholar] [CrossRef]
- Ferreira, J.; Moreira, A.P.; Silva, M.; Santos, F. A survey on localization, mapping, and trajectory planning for quadruped robots in vineyards. In Proceedings of the 2022 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Santa Maria da Feira, Portugal, 29–30 April 2022; pp. 237–242. [Google Scholar]
- Fukuhara, A.; Gunji, M.; Masuda, Y. Comparative anatomy of quadruped robots and animals: A review. Adv. Robot. 2022, 36, 612–630. [Google Scholar] [CrossRef]
- Abdulwahab, A.H.; Mazlan, A.Z.A.; Hawary, A.F.; Hadi, N.H. Quadruped robots mechanism, structural design, energy, gait, stability, and actuators: A review study. Int. J. Mech. Eng. Robot. Res. 2023, 12, 385–395. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, J.; Cao, G.; Yuan, Y.; Yao, X.; Qi, L. Intelligent Control of Multilegged Robot Smooth Motion: A Review. IEEE Access 2023, 11, 86645–86685. [Google Scholar] [CrossRef]
- Taheri, H.; Mozayani, N. A study on quadruped mobile robots. Mech. Mach. Theory 2023, 190, 105448. [Google Scholar] [CrossRef]
- Majithia, A.; Shah, D.; Dave, J.; Kumar, A.; Rathee, S.; Dogra, N.; HM, V.; Chiniwar, D.S.; Hiremath, S. Design, motions, capabilities, and applications of quadruped robots: A comprehensive review. Front. Mech. Eng. 2024, 10, 1448681. [Google Scholar] [CrossRef]
- Kim, M.S.; Belkadi, D.E.; Mayer, H.S.; Tong, K.; Faruqi, M.K.; Hassan, K.I.; Kim, J.M.; Babatain, W.; Fahad, H.M.; Hussain, M.M. Accessorizing Quadrupedal Robots with Wearable Electronics. Adv. Intell. Syst. 2024, 6, 2300633. [Google Scholar] [CrossRef]
- Kotha, S.S.; Akter, N.; Abhi, S.H.; Das, S.K.; Islam, M.R.; Ali, M.F.; Ahamed, M.H.; Islam, M.M.; Sarker, S.K.; Badal, M.F.R.; et al. Next generation legged robot locomotion: A review on control techniques. Heliyon 2024, 10, e37237. [Google Scholar] [CrossRef]
- Collins, S.; Ruina, A.; Tedrake, R.; Wisse, M. Efficient bipedal robots based on passive-dynamic walkers. Science 2005, 307, 1082–1085. [Google Scholar] [CrossRef] [PubMed]
- Coelho, J.; Ribeiro, F.; Dias, B.; Lopes, G.; Flores, P. Trends in the control of hexapod robots: A survey. Robotics 2021, 10, 100. [Google Scholar] [CrossRef]
- Katz, B.; Di Carlo, J.; Kim, S. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6295–6301. [Google Scholar]
- Wikipedia Contributors. Walking Truck. 2024. Available online: https://en.wikipedia.org/wiki/Walking_Truck (accessed on 9 December 2024).
- Waldron, K.; McGhee, R. The adaptive suspension vehicle. IEEE Control Syst. Mag. 1986, 6, 7–12. [Google Scholar] [CrossRef]
- Hutchinson, A. Machines can walk. Chart. Mech. Eng. 1967, 11, 480–484. [Google Scholar]
- Boston Dynamics. Spot Robot Specifications. 2021. Available online: https://support.bostondynamics.com/s/article/Spot-Specifications-49916 (accessed on 18 November 2024).
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Blösch, M.; et al. Anymal-toward legged robots for harsh environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Wensing, P.M.; Wang, A.; Seok, S.; Otten, D.; Lang, J.; Kim, S. Proprioceptive actuator design in the mit cheetah: Impact mitigation and high-bandwidth physical interaction for dynamic legged robots. IEEE Trans. Robot. 2017, 33, 509–522. [Google Scholar] [CrossRef]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2245–2252. [Google Scholar]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ–a hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Semini, C.; Barasuol, V.; Goldsmith, J.; Frigerio, M.; Focchi, M.; Gao, Y.; Caldwell, D.G. Design of the hydraulically actuated, torque-controlled quadruped robot HyQ2Max. IEEE/ASME Trans. Mechatron. 2016, 22, 635–646. [Google Scholar] [CrossRef]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot. IEEE/ASME Trans. Mechatron. 2014, 20, 1117–1129. [Google Scholar] [CrossRef]
- Saranli, U.; Buehler, M.; Koditschek, D.E. RHex: A simple and highly mobile hexapod robot. Int. J. Robot. Res. 2001, 20, 616–631. [Google Scholar] [CrossRef]
- Alexander, R.M. Principles of Animal Locomotion; Princeton University Press: Princeton, NJ, USA, 2003. [Google Scholar]
- Spröwitz, A.; Tuleu, A.; Vespignani, M.; Ajallooeian, M.; Badri, E.; Ijspeert, A.J. Towards dynamic trot gait locomotion: Design, control, and experiments with Cheetah-cub, a compliant quadruped robot. Int. J. Robot. Res. 2013, 32, 932–950. [Google Scholar] [CrossRef]
- Koco, E.; Mirkovic, D.; Kovačić, Z. Hybrid compliance control for locomotion of electrically actuated quadruped robot. J. Intell. Robot. Syst. 2019, 94, 537–563. [Google Scholar] [CrossRef]
- Ashtiani, M.S.; Aghamaleki Sarvestani, A.; Badri-Spröwitz, A. Hybrid parallel compliance allows robots to operate with sensorimotor delays and low control frequencies. Front. Robot. AI 2021, 8, 645748. [Google Scholar] [CrossRef] [PubMed]
- Stella, F.; Achkar, M.M.; Della Santina, C.; Hughes, J. Synergy-based robotic quadruped leveraging passivity for natural intelligence and behavioural diversity. Nat. Mach. Intell. 2025, 7, 386–399. [Google Scholar] [CrossRef]
- Hoffmann, M.; Simanek, J. The merits of passive compliant joints in legged locomotion: Fast learning, superior energy efficiency and versatile sensing in a quadruped robot. J. Bionic Eng. 2017, 14, 1–14. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. Anymal—a highly mobile and dynamic quadrupedal robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 38–44. [Google Scholar]
- Hebert, P.; Bajracharya, M.; Ma, J.; Hudson, N.; Aydemir, A.; Reid, J.; Bergh, C.; Borders, J.; Frost, M.; Hagman, M.; et al. Mobile manipulation and mobility as manipulation—Design and algorithms of RoboSimian. J. Field Robot. 2015, 32, 255–274. [Google Scholar] [CrossRef]
- Hagenah, H.; Böhm, W.; Breitsprecher, T.; Merklein, M.; Wartzack, S. Modelling, construction and manufacture of a lightweight robot arm. Procedia CIRP 2013, 12, 211–216. [Google Scholar] [CrossRef]
- Pedroso, A.F.; Sebbe, N.P.; Silva, F.J.; Campilho, R.D.; Sales-Contini, R.C.; Costa, R.D.; Sánchez, I.I. An overview on the recent advances in robot-assisted compensation methods used in machining lightweight materials. Robot. Comput.-Integr. Manuf. 2025, 91, 102844. [Google Scholar] [CrossRef]
- Wang, B.; Gao, H. Fibre reinforced polymer composites. In Advances in Machining of Composite Materials: Conventional and Non-Conventional Processes; Springer: Berlin/Heidelberg, Germany, 2021; pp. 15–43. [Google Scholar]
- Wang, X.; Zhang, D.; Zhao, C.; Zhang, P.; Zhang, Y.; Cai, Y. Optimal design of lightweight serial robots by integrating topology optimization and parametric system optimization. Mech. Mach. Theory 2019, 132, 48–65. [Google Scholar] [CrossRef]
- De Marzi, A.; Vibrante, M.; Bottin, M.; Franchin, G. Development of robot assisted hybrid additive manufacturing technology for the freeform fabrication of lattice structures. Addit. Manuf. 2023, 66, 103456. [Google Scholar] [CrossRef]
- Oguntosin, V.; Akindele, A. Design of a joint angle measurement system for the rotary joint of a robotic arm using an Incremental Rotary Encoder. J. Phys. Conf. Ser. 2019, 1299, 012108. [Google Scholar] [CrossRef]
- Cao, M.Y.; Laws, S.; y Baena, F.R. Six-axis force/torque sensors for robotics applications: A review. IEEE Sens. J. 2021, 21, 27238–27251. [Google Scholar] [CrossRef]
- Hughes, J.; Stella, F.; Santina, C.D.; Rus, D. Sensing soft robot shape using imus: An experimental investigation. In Experimental Robotics: Proceedings of the 17th International Symposium; Springer: Berlin/Heidelberg, Germany, 2021; pp. 543–552. [Google Scholar]
- Cheng, Y.; Wang, G.Y. Mobile robot navigation based on lidar. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 1243–1246. [Google Scholar]
- Irawan, Y.; Muhardi, M.; Ordila, R.; Diandra, R. Automatic floor cleaning robot using arduino and ultrasonic sensor. J. Robot. Control (JRC) 2021, 2, 240–243. [Google Scholar] [CrossRef]
- Roberts, P.; Zadan, M.; Majidi, C. Soft tactile sensing skins for robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar] [CrossRef]
- Akhshirsh, G.S.; Al-Salihi, N.K.; Hamid, O.H. A cost-effective GPS-aided autonomous guided vehicle for global path planning. Bull. Electr. Eng. Inform. 2021, 10, 650–657. [Google Scholar] [CrossRef]
- Filippini, C.; Perpetuini, D.; Cardone, D.; Chiarelli, A.M.; Merla, A. Thermal infrared imaging-based affective computing and its application to facilitate human robot interaction: A review. Appl. Sci. 2020, 10, 2924. [Google Scholar] [CrossRef]
- Civera, J.; Gálvez-López, D.; Riazuelo, L.; Tardós, J.D.; Montiel, J.M.M. Towards semantic SLAM using a monocular camera. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 1277–1284. [Google Scholar]
- Itu, R.; Danescu, R.G. A self-calibrating probabilistic framework for 3d environment perception using monocular vision. Sensors 2020, 20, 1280. [Google Scholar] [CrossRef]
- Shu, F.; Lesur, P.; Xie, Y.; Pagani, A.; Stricker, D. SLAM in the field: An evaluation of monocular mapping and localization on challenging dynamic agricultural environment. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Virtual Conference, 5–9 January 2021; pp. 1761–1771. [Google Scholar]
- Gao, B.; Lang, H.; Ren, J. Stereo visual SLAM for autonomous vehicles: A review. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 1316–1322. [Google Scholar]
- Esparza, D.; Flores, G. The STDyn-SLAM: A stereo vision and semantic segmentation approach for VSLAM in dynamic outdoor environments. IEEE Access 2022, 10, 18201–18209. [Google Scholar] [CrossRef]
- Kolhatkar, C.; Wagle, K. Review of SLAM algorithms for indoor mobile robot with LIDAR and RGB-D camera technology. In Innovations in Electrical and Electronic Engineering: Proceedings of the ICEEE 2020, Faridabad, India, 28–29 February 2020; Springer: Singapore, 2021; pp. 397–409. [Google Scholar]
- Vulpi, F.; Marani, R.; Petitti, A.; Reina, G.; Milella, A. An RGB-D multi-view perspective for autonomous agricultural robots. Comput. Electron. Agric. 2022, 202, 107419. [Google Scholar] [CrossRef]
- McNulty, D.; Hennessy, A.; Li, M.; Armstrong, E.; Ryan, K.M. A review of Li-ion batteries for autonomous mobile robots: Perspectives and outlook for the future. J. Power Sources 2022, 545, 231943. [Google Scholar] [CrossRef]
- Li, W.; Peng, Y.; Zhu, Y.; Pham, D.T.; Nee, A.; Ong, S. End-of-life electric vehicle battery disassembly enabled by intelligent and human-robot collaboration technologies: A review. Robot. Comput.-Integr. Manuf. 2024, 89, 102758. [Google Scholar] [CrossRef]
- Ghobadpour, A.; Cardenas, A.; Monsalve, G.; Mousazadeh, H. Optimal design of energy sources for a photovoltaic/fuel cell extended-range agricultural mobile robot. Robotics 2023, 12, 13. [Google Scholar] [CrossRef]
- Al Assadi, A.; Goes, D.; Baazouzi, S.; Staudacher, M.; Malczyk, P.; Kraus, W.; Nägele, F.; Huber, M.F.; Fleischer, J.; Peuker, U.; et al. Challenges and prospects of automated disassembly of fuel cells for a circular economy. Resour. Conserv. Recycl. Adv. 2023, 19, 200172. [Google Scholar] [CrossRef]
- Renau, J.; Tejada, D.; García, V.; López, E.; Domenech, L.; Lozano, A.; Barreras, F. Design, development, integration and evaluation of hybrid fuel cell power systems for an unmanned water surface vehicle. Int. J. Hydrogen Energy 2024, 54, 1273–1285. [Google Scholar] [CrossRef]
- Mikołajczyk, T.; Mikołajewski, D.; Kłodowski, A.; Łukaszewicz, A.; Mikołajewska, E.; Paczkowski, T.; Macko, M.; Skornia, M. Energy sources of mobile robot power systems: A systematic review and comparison of efficiency. Appl. Sci. 2023, 13, 7547. [Google Scholar] [CrossRef]
- Farooq, M.U.; Eizad, A.; Bae, H.K. Power solutions for autonomous mobile robots: A survey. Robot. Auton. Syst. 2023, 159, 104285. [Google Scholar] [CrossRef]
- Liang, Z.; He, J.; Hu, C.; Pu, X.; Khani, H.; Dai, L.; Fan, D.; Manthiram, A.; Wang, Z.L. Next-Generation Energy Harvesting and Storage Technologies for Robots Across All Scales. Adv. Intell. Syst. 2023, 5, 2200045. [Google Scholar] [CrossRef]
- Hang, P.; Lou, B.; Lv, C. Nonlinear predictive motion control for autonomous mobile robots considering active fault-tolerant control and regenerative braking. Sensors 2022, 22, 3939. [Google Scholar] [CrossRef]
- Okui, N. Development of Driving Robot and Driver Model Applied Regenerative Brake Control of Electrified Vehicles. J. Robot. Mechatron. 2024, 36, 879–888. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Optimization of energy consumption in industrial robots, a review. Cogn. Robot. 2023, 3, 142–157. [Google Scholar] [CrossRef]
- Lin, X.; Zhu, H.; Amwayi, F.E. Locomotion trajectory optimization for quadruped robots with kinematic parameter calibration and compensation. Measurement 2025, 240, 115622. [Google Scholar] [CrossRef]
- Bing, Z.; Lemke, C.; Cheng, L.; Huang, K.; Knoll, A. Energy-efficient and damage-recovery slithering gait design for a snake-like robot based on reinforcement learning and inverse reinforcement learning. Neural Netw. 2020, 129, 323–333. [Google Scholar] [CrossRef] [PubMed]
- Fukuoka, Y.; Fukino, K.; Habu, Y.; Mori, Y. Energy evaluation of a bio-inspired gait modulation method for quadrupedal locomotion. Bioinspir. Biomim. 2015, 10, 046017. [Google Scholar] [CrossRef]
- Kim, D.; Jorgensen, S.J.; Lee, J.; Ahn, J.; Luo, J.; Sentis, L. Dynamic locomotion for passive-ankle biped robots and humanoids using whole-body locomotion control. Int. J. Robot. Res. 2020, 39, 936–956. [Google Scholar] [CrossRef]
- Stetsenko, K.; Yevsieiev, V.; Maksymova, S. Exploring BEAM Robotics for Adaptive and Energy-Efficient Solutions. Multidiscip. J. Sci. Technol. 2023, 3, 193–199. [Google Scholar]
- Du, S.; Zhou, J.; Hong, J.; Zhao, H.; Ma, S. Application and progress of high-efficiency electro-hydrostatic actuator technology with energy recovery: A comprehensive review. Energy Convers. Manag. 2024, 321, 119041. [Google Scholar] [CrossRef]
- Krimsky, E.; Collins, S.H. Elastic energy-recycling actuators for efficient robots. Sci. Robot. 2024, 9, eadj7246. [Google Scholar] [CrossRef]
- Seo, J.; Paik, J.; Yim, M. Modular reconfigurable robotics. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 63–88. [Google Scholar] [CrossRef]
- Post, M.A.; Yan, X.T.; Letier, P. Modularity for the future in space robotics: A review. Acta Astronaut. 2021, 189, 530–547. [Google Scholar] [CrossRef]
- Kar, D.C. Design of statically stable walking robot: A review. J. Robot. Syst. 2003, 20, 671–686. [Google Scholar] [CrossRef]
- Gong, Y.; Sun, G.; Nair, A.; Bidwai, A.; CS, R.; Grezmak, J.; Sartoretti, G.; Daltorio, K.A. Legged robots for object manipulation: A review. Front. Mech. Eng. 2023, 9, 1142421. [Google Scholar] [CrossRef]
- Qiao, L.; Li, Y.; Chen, D.; Serikawa, S.; Guizani, M.; Lv, Z. A survey on 5G/6G, AI, and Robotics. Comput. Electr. Eng. 2021, 95, 107372. [Google Scholar] [CrossRef]
- Tardioli, D. A wireless communication protocol for distributed robotics applications. In Proceedings of the 2014 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Espinho, Portugal, 14–15 May 2014; pp. 253–260. [Google Scholar]
- Cousins, S.; Gerkey, B.; Conley, K.; Garage, W. Sharing software with ros [ros topics]. IEEE Robot. Autom. Mag. 2010, 17, 12–14. [Google Scholar] [CrossRef]
- Mamani-Saico, A.; Yanyachi, P.R. Implementation and Performance Study of the Micro-ROS/ROS2 Framework to algorithm design for attitude determination and control system. IEEE Access 2023, 11, 128451–128460. [Google Scholar] [CrossRef]
- Afaq, M.; Jebelli, A.; Ahmad, R. An intelligent thermal management fuzzy logic control system design and analysis using ANSYS fluent for a mobile robotic platform in extreme weather applications. J. Intell. Robot. Syst. 2023, 107, 11. [Google Scholar] [CrossRef]
- Gunjate, S.; Khot, D.S.A. A systematic review of emergency braking assistant system to avoid accidents using pulse width modulation and fuzzy logic control integrated with antilock braking. Int. J. Automot. Mech. Eng. 2023, 20, 10457–10479. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014; Volume 2, pp. 1–9. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D mapping with an RGB-D camera. IEEE Trans. Robot. 2013, 30, 177–187. [Google Scholar] [CrossRef]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A tutorial on graph-based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Pu, H.; Luo, J.; Wang, G.; Huang, T.; Liu, H. Visual SLAM integration with semantic segmentation and deep learning: A review. IEEE Sens. J. 2023, 23, 22119–22138. [Google Scholar] [CrossRef]
- Wellhausen, L.; Dosovitskiy, A.; Ranftl, R.; Walas, K.; Cadena, C.; Hutter, M. Where should i walk? predicting terrain properties from images via self-supervised learning. IEEE Robot. Autom. Lett. 2019, 4, 1509–1516. [Google Scholar] [CrossRef]
- Vulpi, F.; Milella, A.; Marani, R.; Reina, G. Recurrent and convolutional neural networks for deep terrain classification by autonomous robots. J. Terramech. 2021, 96, 119–131. [Google Scholar] [CrossRef]
- Valada, A.; Burgard, W. Deep spatiotemporal models for robust proprioceptive terrain classification. Int. J. Robot. Res. 2017, 36, 1521–1539. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kohli, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davison, A.; et al. KinectFusion: Real-time 3D reconstruction and interaction using a moving depth camera. In Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology (UIST), Santa Barbara, CA, USA, 16–19 October 2011; pp. 559–568. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Khattak, S.; Nguyen, H.; Mascarich, F.; Dang, T.; Alexis, K. Complementary multi–modal sensor fusion for resilient robot pose estimation in subterranean environments. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1024–1029. [Google Scholar]
- Feng, D.; Haase-Schütz, C.; Rosenbaum, L.; Hertlein, H.; Glaeser, C.; Timm, F.; Wiesbeck, W.; Dietmayer, K. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods, and challenges. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1341–1360. [Google Scholar] [CrossRef]
- Borenstein, J.; Everett, H.; Feng, L. Navigating Mobile Robots: Systems and Techniques; AK Peters, Ltd.: Natick, MA, USA, 1996. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report TR 98-11; Department of Computer Science, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Beer, J.M.; Fisk, A.D.; Rogers, W.A. Toward a framework for levels of robot autonomy in human-robot interaction. J. Hum.-Robot Interact. 2014, 3, 74. [Google Scholar] [CrossRef]
- Argall, B.D.; Billard, A.G. A survey of tactile human–robot interactions. Robot. Auton. Syst. 2010, 58, 1159–1176. [Google Scholar] [CrossRef]
- Lasota, P.A.; Fong, T.; Shah, J.A. A survey of methods for safe human-robot interaction. Found. Trends® Robot. 2017, 5, 261–349. [Google Scholar] [CrossRef]
- Gervasi, R.; Barravecchia, F.; Mastrogiacomo, L.; Franceschini, F. Applications of affective computing in human-robot interaction: State-of-art and challenges for manufacturing. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2023, 237, 815–832. [Google Scholar] [CrossRef]
- Kober, J.; Bagnell, J.A.; Peters, J. Reinforcement learning in robotics: A survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef]
- Kingma, D.P. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Taheri, H.; Xia, Z.C. SLAM; definition and evolution. Eng. Appl. Artif. Intell. 2021, 97, 104032. [Google Scholar] [CrossRef]
- Lajoie, P.Y.; Beltrame, G. Swarm-slam: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems. IEEE Robot. Autom. Lett. 2023, 9, 475–482. [Google Scholar] [CrossRef]
- Focchi, M.; Barasuol, V.; Frigerio, M.; Caldwell, D.G.; Semini, C. Slip detection and recovery for quadruped robots. Robot. Res. 2018, 2, 185–199. [Google Scholar]
- Hutter, M.; Sommer, H.; Gehring, C.; Hoepflinger, M.; Bloesch, M.; Siegwart, R. Quadrupedal locomotion using hierarchical operational space control. Int. J. Robot. Res. 2014, 33, 1047–1062. [Google Scholar] [CrossRef]
- Bellicoso, C.D.; Jenelten, F.; Fankhauser, P.; Gehring, C.; Hwangbo, J.; Hutter, M. Dynamic locomotion and whole-body control for quadrupedal robots. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3359–3365. [Google Scholar]
- Mattamala Aravena, M. Vision-Based Legged Robot Navigation: Localisation, Local Planning, Learning. Ph.D. Thesis, University of Oxford, Oxford, UK, 2023. [Google Scholar]
- Zhang, H.; Shao, F.; Chu, W.; Dai, J.; Li, X.; Zhang, X.; Gong, C. Faster R-CNN based on frame difference and spatiotemporal context for vehicle detection. Signal Image Video Process. 2024, 18, 7013–7027. [Google Scholar] [CrossRef]
- Sapkota, R.; Ahmed, D.; Karkee, M. Comparing YOLOv8 and Mask R-CNN for instance segmentation in complex orchard environments. Artif. Intell. Agric. 2024, 13, 84–99. [Google Scholar] [CrossRef]
- Hasan, M.; Vasker, N.; Hossain, M.M.; Bhuiyan, M.I.; Biswas, J.; Rashid, M.R.A. Framework for fish freshness detection and rotten fish removal in Bangladesh using mask R–CNN method with robotic arm and fisheye analysis. J. Agric. Food Res. 2024, 16, 101139. [Google Scholar] [CrossRef]
- Kamble, T.U.; Mahajan, S.P. 3D vision using multiple structured light-based kinect depth cameras. Int. J. Image Graph. 2024, 24, 2450001. [Google Scholar] [CrossRef]
- Troncoso, J.M.R.; Correa, A.C. 3D Reconstruction of Cultural Heritage Pieces Using Depth Sensors. In Proceedings of the 2024 XXIV Symposium of Image, Signal Processing, and Artificial Vision (STSIVA), Pamplona, Colombia, 17–19 July 2024; pp. 1–5. [Google Scholar]
- Corradi, T.; Hall, P.; Iravani, P. Object recognition combining vision and touch. Robot. Biomim. 2017, 4, 2. [Google Scholar] [CrossRef]
- Yang, F.; Feng, C.; Chen, Z.; Park, H.; Wang, D.; Dou, Y.; Zeng, Z.; Chen, X.; Gangopadhyay, R.; Owens, A.; et al. Binding touch to everything: Learning unified multimodal tactile representations. In Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 17–21 June 2024; pp. 26340–26353. [Google Scholar]
- Dang, T.V.; Bui, N.T. Multi-scale fully convolutional network-based semantic segmentation for mobile robot navigation. Electronics 2023, 12, 533. [Google Scholar] [CrossRef]
- Zhang, C.; Lu, W.; Wu, J.; Ni, C.; Wang, H. SegNet Network Architecture for Deep Learning Image Segmentation and Its Integrated Applications and Prospects. Acad. J. Sci. Technol. 2024, 9, 224–229. [Google Scholar] [CrossRef]
- Li, J.; Cong, D.; Yang, Y.; Yang, Z. A hydraulic actuator for joint robots with higher torque to weight ratio. Robotica 2023, 41, 756–774. [Google Scholar] [CrossRef]
- Jeon, S.; Jung, M.; Choi, S.; Kim, B.; Hwangbo, J. Learning whole-body manipulation for quadrupedal robot. IEEE Robot. Autom. Lett. 2023, 9, 699–706. [Google Scholar] [CrossRef]
- Hogan, N. Impedance control: An approach to manipulation. In Proceedings of the 1984 American Control Conference (ACC), San Diego, CA, USA, 6–8 June 1984; pp. 304–313. [Google Scholar]
- Shin, D.; Sardellitti, I.; Khatib, O. A hybrid actuation approach for human-friendly robot design. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 1747–1752. [Google Scholar]
- Dills, P. Hybrid Actuation in Haptics and Human-Friendly Robotics. Ph.D. Thesis, The University of Wisconsin-Madison, Madison, WI, USA, 2024. [Google Scholar]
- Levine, S.; Finn, C.; Darrell, T.; Abbeel, P. End-to-end training of deep visuomotor policies. J. Mach. Learn. Res. 2016, 17, 1–40. [Google Scholar]
- Lin, H.; Li, B.; Chu, X.; Dou, Q.; Liu, Y.; Au, K.W.S. End-to-end learning of deep visuomotor policy for needle picking. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 8487–8494. [Google Scholar]
- Sadeghi, F.; Levine, S. Cad2rl: Real single-image flight without a single real image. arXiv 2016, arXiv:1611.04201. [Google Scholar]
- Kolter, J.Z.; Rodgers, M.P.; Ng, A.Y. A control architecture for quadruped locomotion over rough terrain. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 19–23 May 2008; pp. 811–818. [Google Scholar]
- Kolvenbach, H.; Wisth, D.; Buchanan, R.; Valsecchi, G.; Grandia, R.; Fallon, M.; Hutter, M. Towards autonomous inspection of concrete deterioration in sewers with legged robots. J. Field Robot. 2020, 37, 1314–1327. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Orthey, A.; Chamzas, C.; Kavraki, L.E. Sampling-based motion planning: A comparative review. Annu. Rev. Control. Robot. Auton. Syst. 2023, 7, 285–310. [Google Scholar] [CrossRef]
- Brock, O.; Khatib, O. High-speed navigation using the global dynamic window approach. In Proceedings of the Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 341–346. [Google Scholar]
- Kobayashi, M.; Motoi, N. Local path planning: Dynamic window approach with virtual manipulators considering dynamic obstacles. IEEE Access 2022, 10, 17018–17029. [Google Scholar] [CrossRef]
- Dobrevski, M.; Skočaj, D. Dynamic Adaptive Dynamic Window Approach. IEEE Trans. Robot. 2024, 40, 3068–3081. [Google Scholar] [CrossRef]
- Zhu, L.; Fan, J.; Zhao, J.; Wu, X.; Liu, G. Global path planning and local obstacle avoidance of searching robot in mine disasters based on grid method. J. Cent. South Univ. Sci. Technol. 2011, 42, 3421–3428. [Google Scholar]
- Tang, Y.; Qi, S.; Zhu, L.; Zhuo, X.; Zhang, Y.; Meng, F. Obstacle avoidance motion in mobile robotics. J. Syst. Simul. 2024, 36, 1–26. [Google Scholar]
- Pérez-Higueras, N.; Caballero, F.; Merino, L. Learning human-aware path planning with fully convolutional networks. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 5897–5902. [Google Scholar]
- Goodrich, M.A.; Schultz, A.C. Human–robot interaction: A survey. Found. Trends® Hum.-Interact. 2008, 1, 203–275. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Mutlu, B.; Shiwa, T.; Kanda, T.; Ishiguro, H.; Hagita, N. Footing in human-robot conversations: How robots might shape participant roles using gaze cues. In Proceedings of the 4th ACM/IEEE International Conference on Human Robot Interaction, New York, NY, USA, 9–13 March 2009; HRI ’09. pp. 61–68. [Google Scholar] [CrossRef]
- Breazeal, C. Designing Sociable Robots; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Dragan, A.D.; Lee, K.C.; Srinivasa, S.S. Legibility and predictability of robot motion. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 4–6 March 2013; pp. 301–308. [Google Scholar]
- Clark, H.H. Using Language; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Murphy, R.R. Trial by fire [rescue robots]. IEEE Robot. Autom. Mag. 2004, 11, 50–61. [Google Scholar] [CrossRef]
- Tellex, S.; Kollar, T.; Dickerson, S.; Walter, M.; Banerjee, A.; Teller, S.; Roy, N. Understanding natural language commands for robotic navigation and mobile manipulation. In Proceedings of the Twenty-Fifth AAAI Conference on Artificial Intelligence (AAAI-11), San Francisco, CA, USA, 7–11 August 2011; pp. 1507–1514. [Google Scholar]
- Chandrasekaran, B.; Conrad, J.M. Human-robot collaboration: A survey. In Proceedings of the IEEE SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar]
- Gravina, R.; Li, Q. Emotion-relevant activity recognition based on smart cushion using multi-sensor fusion. Inf. Fusion 2019, 48, 1–10. [Google Scholar] [CrossRef]
- Li, Q.; Gravina, R.; Fortino, G. Posture and gesture analysis supporting emotional activity recognition. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2742–2747. [Google Scholar]
- Feil-Seifer, D.; Mataric, M.J. Defining socially assistive robotics. In Proceedings of the 9th IEEE International Conference on Rehabilitation Robotics (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; pp. 465–468. [Google Scholar]
- Sheridan, T.B. Human–robot interaction: Status and challenges. Hum. Factors 2016, 58, 525–532. [Google Scholar] [CrossRef]
- Pereira, F.G.; Vassallo, R.F.; Salles, E.O.T. Human–robot interaction and cooperation through people detection and gesture recognition. J. Control Autom. Electr. Syst. 2013, 24, 187–198. [Google Scholar] [CrossRef]
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Li, W.; Hu, Y.; Zhou, Y.; Pham, D.T. Safe human–robot collaboration for industrial settings: A survey. J. Intell. Manuf. 2024, 35, 2235–2261. [Google Scholar] [CrossRef]
- ISO 13482:2014; Robots and Robotic Devices—Safety Requirements for Personal Care Robots. International Organization for Standardization: Geneva, Switzerland, 2014.
- Yu, B.; Kasaei, H.; Cao, M. PANav: Toward Privacy-Aware Robot Navigation via Vision-Language Models. arXiv 2024, arXiv:2410.04302. [Google Scholar]
- Shin, D.; Lim, J.S.; Ahmad, N.; Ibahrine, M. Understanding user sensemaking in fairness and transparency in algorithms: Algorithmic sensemaking in over-the-top platform. AI Soc. 2024, 39, 477–490. [Google Scholar] [CrossRef]
- Bartneck, C.; Belpaeme, T.; Eyssel, F.; Kanda, T.; Keijsers, M.; Šabanović, S. Human-Robot Interaction: An Introduction; Cambridge University Press: Cambridge, UK, 2024. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Kohl, N.; Stone, P. Policy gradient reinforcement learning for fast quadrupedal locomotion. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation (ICRA), New Orleans, LA, USA, 26 April–1 May 2004; Volume 3, pp. 2619–2624. [Google Scholar]
- Hwangbo, J.; Lee, J.; Dosovitskiy, A.; Bellicoso, D.; Tsounis, V.; Koltun, V.; Hutter, M. Learning agile and dynamic motor skills for legged robots. Sci. Robot. 2019, 4, eaau5872. [Google Scholar] [CrossRef]
- Hoffman, J.; Tzeng, E.; Park, T.; Zhu, J.Y.; Isola, P.; Saenko, K.; Efros, A.; Darrell, T. CyCADA: Cycle-consistent adversarial domain adaptation. In Proceedings of the 35th International Conference on Machine Learning (ICML 2018), Stockholm, Sweden, 10–15 July 2018; pp. 1989–1998. [Google Scholar]
- Garcıa, J.; Fernández, F. A comprehensive survey on safe reinforcement learning. J. Mach. Learn. Res. 2015, 16, 1437–1480. [Google Scholar]
- Ames, A.D.; Xu, X.; Grizzle, J.W.; Tabuada, P. Control barrier function based quadratic programs for safety critical systems. IEEE Trans. Autom. Control 2016, 62, 3861–3876. [Google Scholar] [CrossRef]
- Shi, G.; Shi, X.; O’Connell, M.; Yu, R.; Azizzadenesheli, K.; Anandkumar, A.; Yue, Y.; Chung, S.J. Neural Lander: Stable drone landing control using learned dynamics. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9784–9790. [Google Scholar]
- Ivanov, R.; Weimer, J.; Alur, R.; Pappas, G.J.; Lee, I. Verisig: Verifying safety properties of hybrid systems with neural network controllers. In Proceedings of the 22nd ACM International Conference on Hybrid Systems: Computation and Control (HSCC 2019), Montreal, QC, Canada, 16–18 April 2019; pp. 169–178. [Google Scholar]
- Losey, D.P.; Bajcsy, A.; O’Malley, M.K.; Dragan, A.D. Physical interaction as communication: Learning robot objectives online from human corrections. Int. J. Robot. Res. 2022, 41, 20–44. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, T.; Coumans, E.; Iscen, A.; Bai, Y.; Hafner, D.; Bohez, S.; Vanhoucke, V. Sim-to-real: Learning agile locomotion for quadruped robots. arXiv 2018, arXiv:1804.10332. [Google Scholar]
- Khansari-Zadeh, S.M.; Billard, A. Learning stable nonlinear dynamical systems with gaussian mixture models. IEEE Trans. Robot. 2011, 27, 943–957. [Google Scholar] [CrossRef]
- Yoo, Y.; Lee, C.Y.; Zhang, B.T. Multimodal anomaly detection based on deep auto-encoder for object slip perception of mobile manipulation robots. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11443–11449. [Google Scholar]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-organization, embodiment, and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Ijspeert, A.J. Central pattern generators for locomotion control in animals and robots: A review. Neural Netw. 2008, 21, 642–653. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Gehring, C.; Fankhauser, P.; Isler, L.; Diethelm, R.; Bachmann, S.; Potz, M.; Gerstenberg, L.; Hutter, M. ANYmal in the field: Solving industrial inspection of an offshore HVDC platform with a quadrupedal robot. In Field and Service Robotics: Proceedings of the Results of the 12th International Conference; Springer: Singapore, 2021; pp. 247–260. [Google Scholar]
- Maurtua, I.; Susperregi, L.; Fernández, A.; Tubío, C.; Perez, C.; Rodríguez, J.; Felsch, T.; Ghrissi, M. MAINBOT–mobile robots for inspection and maintenance in extensive industrial plants. Energy Procedia 2014, 49, 1810–1819. [Google Scholar] [CrossRef]
- Parker, L.E.; Draper, J.V. Robotics applications in maintenance and repair. Handb. Ind. Robot. 1998, 2, 1023–1036. [Google Scholar]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Zhao, C.; Fan, B.; Li, J.; Feng, Q. Agricultural robots: Technology progress, challenges and trends. Smart Agric. 2023, 5, 1. [Google Scholar]
- Rodríguez-Lera, F.J.; González-Santamarta, M.A.; Orden, J.M.G.; Fernández-Llamas, C.; Matellán-Olivera, V.; Sánchez-González, L. Lessons Learned in Quadruped Deployment in Livestock Farming. arXiv 2024, arXiv:2404.16008. [Google Scholar]
- Kitić, G.; Krklješ, D.; Panić, M.; Petes, C.; Birgermajer, S.; Crnojević, V. Agrobot Lala—an autonomous robotic system for real-time, in-field soil sampling, and analysis of nitrates. Sensors 2022, 22, 4207. [Google Scholar] [CrossRef]
- Moses, J.; Ford, G. See Spot save lives: Fear, humanitarianism, and war in the development of robot quadrupeds. Digit. War 2021, 2, 64. [Google Scholar] [CrossRef]
- Niemelä, M.; Arvola, A.; Aaltonen, I. Monitoring the acceptance of a social service robot in a shopping mall: First results. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (HRI 2017), Vienna, Austria, 6–9 March 2017; pp. 225–226. [Google Scholar]
- Niemelä, M.; Heikkilä, P.; Lammi, H.; Oksman, V. A social robot in a shopping mall: Studies on acceptance and stakeholder expectations. In Social Robots: Technological, Societal and Ethical Aspects of Human-Robot Interaction; Springer: Cham, Switzerland, 2019; pp. 119–144. [Google Scholar]
- Garcia, M.R.; Walck, C.; Gonzalez, B.; Niemiec, J.; Alkire, G.; Deets, A.; Nadeau, Z.; Hockley, C. OpenMutt: A reconfigurable quadruped robot for research and education. Int. J. Mech. Eng. Educ. 2024, 52, 03064190241263575. [Google Scholar] [CrossRef]
- Aydınocak, E.U. Robotics Systems and Healthcare Logistics. In Health 4.0 and Medical Supply Chain; Springer: Berlin/Heidelberg, Germany, 2023; pp. 79–96. [Google Scholar]
- Yadav, D.V.; Dinesh, P.; Krian, M. Autonomous Robots for Hospital Logistics and Patient Care: An Effective Way for Elderly Care and Monitoring. I-Manag. J. Augment. Virtual Real. (JAVR) 2024, 2, 8–14. [Google Scholar]
- Banyai, A.D.; Brișan, C. Robotics in physical rehabilitation: Systematic Review. Healthcare 2024, 12, 1720. [Google Scholar] [CrossRef] [PubMed]
- Tamantini, C.; di Luzio, F.S.; Cordella, F.; Pascarella, G.; Agro, F.E.; Zollo, L. A robotic health-care assistant for COVID-19 emergency: A proposed solution for logistics and disinfection in a hospital environment. IEEE Robot. Autom. Mag. 2021, 28, 71–81. [Google Scholar] [CrossRef]
- Cai, S.; Ram, A.; Gou, Z.; Shaikh, M.A.W.; Chen, Y.A.; Wan, Y.; Hara, K.; Zhao, S.; Hsu, D. Navigating Real-World Challenges: A Quadruped Robot Guiding System for Visually Impaired People in Diverse Environments. In Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI ’24), Honolulu, HI, USA, 11–16 May 2024; pp. 1–18. [Google Scholar]
- Bendel, O. Passive, active, and proactive systems and machines for the protection and preservation of animals and animal species. Front. Anim. Sci. 2022, 3, 834634. [Google Scholar] [CrossRef]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Bogue, R. The role of robots in environmental monitoring. Ind. Robot. Int. J. Robot. Res. Appl. 2023, 50, 369–375. [Google Scholar] [CrossRef]
- Rossander, M.; Lideskog, H. Design and implementation of a control system for an autonomous reforestation machine using finite state machines. Forests 2023, 14, 1340. [Google Scholar] [CrossRef]
- de Soto, B.G.; Skibniewski, M.J. Future of robotics and automation in construction. In Construction 4.0; Routledge: London, UK, 2020; pp. 289–306. [Google Scholar]
- Cai, S.; Ma, Z.; Skibniewski, M.J.; Bao, S. Construction automation and robotics for high-rise buildings over the past decades: A comprehensive review. Adv. Eng. Inform. 2019, 42, 100989. [Google Scholar] [CrossRef]
- Xia, P.; Xu, F.; Du, J. Comparison of 3D SLAM for Quadrupedal Robot-Based Scanning. In Computing in Civil Engineering; ASCE: Reston, VA, USA, 2021; pp. 1059–1066. [Google Scholar]
- Turner, C.J.; Oyekan, J.; Stergioulas, L.; Griffin, D. Utilizing industry 4.0 on the construction site: Challenges and opportunities. IEEE Trans. Ind. Inform. 2020, 17, 746–756. [Google Scholar] [CrossRef]
- Zimroz, R.; Hutter, M.; Mistry, M.; Stefaniak, P.; Walas, K.; Wodecki, J. Why should inspection robots be used in deep underground mines? In Proceedings of the 27th International Symposium on Mine Planning and Equipment Selection-MPES 2018; Springer: Cham, Switzerland, 2019; pp. 497–507. [Google Scholar]
- Ramirez, J.; Segovia, A.; Escobar, M.; Quiroz, D.; Cuellar, F. Practical Applications of a Vision-based Robot for Security and Safety of Tailings Tunnels Infrastructure in the Mining Industry. In Proceedings of the 2021 7th International Conference on Control, Automation and Robotics (ICCAR 2021), Singapore (Virtual Conference), 23–26 April 2021; pp. 108–113. [Google Scholar]
- Reddy, A.H.; Kalyan, B.; Murthy, C.S. Mine rescue robot system–a review. Procedia Earth Planet. Sci. 2015, 11, 457–462. [Google Scholar] [CrossRef]
- Lopes, L.; Bodo, B.; Rossi, C.; Henley, S.; Žibret, G.; Kot-Niewiadomska, A.; Correia, V. ROBOMINERS–Developing a bio-inspired modular robot-miner for difficult to access mineral deposits. Adv. Geosci. 2020, 54, 99–108. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V.; Vucetic, B. Autonomous area exploration and mapping in underground mine environments by unmanned aerial vehicles. Robotica 2020, 38, 442–456. [Google Scholar] [CrossRef]
- Kolvenbach, H. Quadrupedal Robots for Planetary Exploration. Ph.D. Thesis, ETH Zurich, Zürich, Switzerland, 2021. [Google Scholar]
- Kuehn, D.; Bernhard, F.; Burchardt, A.; Schilling, M.; Stark, T.; Zenzes, M.; Kirchner, F. Distributed computation in a quadrupedal robotic system. Int. J. Adv. Robot. Syst. 2014, 11, 110. [Google Scholar] [CrossRef]
- Zhuang, H.; Gao, H.; Deng, Z.; Ding, L.; Liu, Z. A review of heavy-duty legged robots. Sci. China Technol. Sci. 2014, 57, 298–314. [Google Scholar] [CrossRef]
- Kaufmann, M.; Vaquero, T.S.; Correa, G.J.; Otstr, K.; Ginting, M.F.; Beltrame, G.; Agha-Mohammadi, A.A. Copilot MIKE: An Autonomous Assistant for Multi-Robot Operations in Cave Exploration. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–9. [Google Scholar]
- Cafolla, D.; Russo, M.; Ceccarelli, M. Experimental validation of HeritageBot III, a robotic platform for cultural heritage. J. Intell. Robot. Syst. 2020, 100, 223–237. [Google Scholar] [CrossRef]
- Lupetti, M.L.; Germak, C.; Giuliano, L. Robots and cultural heritage: New museum experiences. In Proceedings of the Electronic Visualisation and the Arts (EVA 2015), London, UK, 7–9 July 2015; BCS Learning & Development: London, UK, 2015. [Google Scholar]
- Gallozzi, A.; Senatore, L.J.; Strollo, R.M. An overview on robotic applications for cultural heritage and built cultural heritage. SCIRES-IT RESearch Inf. Technol. 2019, 9, 47–56. [Google Scholar]
- Focchi, M.; Del Prete, A.; Havoutis, I.; Featherstone, R.; Caldwell, D.G.; Semini, C. High-slope terrain locomotion for torque-controlled quadruped robots. Auton. Robot. 2017, 41, 259–272. [Google Scholar] [CrossRef]
- Carpentier, J.; Wieber, P.B. Recent progress in legged robots locomotion control. Curr. Robot. Rep. 2021, 2, 231–238. [Google Scholar] [CrossRef]
- Lee, J.; Hwangbo, J.; Wellhausen, L.; Koltun, V.; Hutter, M. Learning quadrupedal locomotion over challenging terrain. Sci. Robot. 2020, 5, eabc5986. [Google Scholar] [CrossRef]
- Lock, R.; Burgess, S.; Vaidyanathan, R. Multi-modal locomotion: From animal to application. Bioinspir. Biomim. 2013, 9, 011001. [Google Scholar] [CrossRef]
- Sihite, E.; Kalantari, A.; Nemovi, R.; Ramezani, A.; Gharib, M. Multi-Modal Mobility Morphobot (M4) with appendage repurposing for locomotion plasticity enhancement. Nat. Commun. 2023, 14, 3323. [Google Scholar] [CrossRef] [PubMed]
- Bi, J.; Chen, T.; Rong, X.; Zhang, G.; Lu, G.; Cao, J.; Jiang, H.; Li, Y. Efficient dynamic locomotion of quadruped robot via adaptive diagonal gait. J. Bionic Eng. 2024, 21, 126–136. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Cutkosky, M.R. Design of materials and mechanisms for responsive robots. Annu. Rev. Control. Robot. Auton. Syst. 2018, 1, 359–384. [Google Scholar] [CrossRef]
- Corbères, T.; Flayols, T.; Léziart, P.A.; Budhiraja, R.; Souères, P.; Saurel, G.; Mansard, N. Comparison of predictive controllers for locomotion and balance recovery of quadruped robots. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 5021–5027. [Google Scholar] [CrossRef]
- Santana, P.F.; Barata, J.; Correia, L. Sustainable robots for humanitarian demining. Int. J. Adv. Robot. Syst. 2007, 4, 23. [Google Scholar] [CrossRef]
- Drew, D.S. Multi-agent systems for search and rescue applications. Curr. Robot. Rep. 2021, 2, 189–200. [Google Scholar] [CrossRef]
- Raparthi, M.; Yellu, R.R.; Thunki, P. Computational Intelligence for Robotics: Exploring Computational Intelligence Techniques for Enhancing the Capabilities of Robotic Systems. Hong Kong J. AI Med. 2023, 3, 51–57. [Google Scholar]
- Mangalore, A.R.; Fonseca, G.A.; Risbud, S.R.; Stratmann, P.; Wild, A. Neuromorphic Quadratic Programming for Efficient and Scalable Model Predictive Control: Towards Advancing Speed and Energy Efficiency in Robotic Control. IEEE Robot. Autom. Mag. 2024, 31, 2–12. [Google Scholar] [CrossRef]
- Ding, Y.; Pandala, A.; Park, H.W. Real-time Model Predictive Control for Versatile Dynamic Motions in Quadrupedal Robots. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8484–8490. [Google Scholar]
- Feng, G.; Zhang, H.; Li, Z.; Peng, X.B.; Basireddy, B.; Yue, L.; Song, Z.; Yang, L.; Liu, Y.; Sreenath, K.; et al. GenLoco: Generalized Locomotion Controllers for Quadrupedal Robots. In Proceedings of the 6th Conference on Robot Learning (CoRL 2022), Auckland, New Zealand, 14–18 December 2022; Proceedings of Machine Learning Research. Volume 205, pp. 1893–1903. Available online: https://proceedings.mlr.press/v205/feng23a.html (accessed on 22 April 2025).
- Nygaard, T.F.; Martin, C.P.; Torresen, J.; Glette, K.; Howard, D. Real-world embodied AI through a morphologically adaptive quadruped robot. Nat. Mach. Intell. 2021, 3, 410–419. [Google Scholar] [CrossRef]
- Miki, T.; Lee, J.; Hwangbo, J.; Wellhausen, L.; Koltun, V.; Hutter, M. Learning robust perceptive locomotion for quadrupedal robots in the wild. Sci. Robot. 2022, 7, eabk2822. [Google Scholar] [CrossRef]
- Navarro, S.E.; Mühlbacher-Karrer, S.; Alagi, H.; Zangl, H.; Koyama, K.; Hein, B.; Duriez, C.; Smith, J.R. Proximity perception in human-centered robotics: A survey on sensing systems and applications. IEEE Trans. Robot. 2021, 38, 1599–1620. [Google Scholar] [CrossRef]
- Vasic, M.; Billard, A. Safety Issues in Human-Robot Interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar]
- Hsu, K.C.; Hu, H.; Fisac, J.F. The safety filter: A unified view of safety-critical control in autonomous systems. Annu. Rev. Control. Robot. Auton. Syst. 2023, 7, 47–72. [Google Scholar] [CrossRef]
- Rueben, M.; Smart, W.D. Privacy in Human-Robot Interaction: Survey and Future Work. In Proceedings of the We Robot 2016: The Fifth Annual Conference on Legal and Policy Issues Relating to Robotics, University of Miami School of Law, Miami, FL, USA, 1–2 April 2016. [Google Scholar]
- Chatzimichali, A.; Harrison, R.; Chrysostomou, D. Toward privacy-sensitive human–robot interaction: Privacy terms and human–data interaction in the personal robot era. Paladyn J. Behav. Robot. 2020, 12, 160–174. [Google Scholar] [CrossRef]
- Marchang, J.; Di Nuovo, A. Assistive multimodal robotic system (AMRSys): Security and privacy issues, challenges, and possible solutions. Appl. Sci. 2022, 12, 2174. [Google Scholar] [CrossRef]
- Tanimu, J.A.; Abada, W. Addressing Cybersecurity Challenges in Robotics: A Comprehensive Overview. Cyber Secur. Appl. 2024, 3, 100074. [Google Scholar] [CrossRef]
- West, D.M. The Future of Work: Robots, AI, and Automation; Brookings Institution Press: Washington, DC, USA, 2018. [Google Scholar]
- Faishal, M.; Mathew, S.; Neikha, K.; Pusa, K.; Zhimomi, T. The future of work: AI, automation, and the changing dynamics of developed economies. World J. Adv. Res. Rev. 2023, 18, 620–629. [Google Scholar] [CrossRef]
- Acemoglu, D.; Restrepo, P. Robots and jobs: Evidence from US labor markets. J. Political Econ. 2020, 128, 2188–2244. [Google Scholar] [CrossRef]
- Acemoglu, D.; Autor, D.; Hazell, J.; Restrepo, P. Artificial intelligence and jobs: Evidence from online vacancies. J. Labor Econ. 2022, 40, S293–S340. [Google Scholar] [CrossRef]
- Palmerini, E.; Bertolini, A.; Battaglia, F.; Koops, B.J.; Carnevale, A.; Salvini, P. RoboLaw: Towards a European framework for robotics regulation. Robot. Auton. Syst. 2016, 86, 78–85. [Google Scholar] [CrossRef]
- Thomasen, K. Robots, Regulation, and the Changing Nature of Public Space. In The Cambridge Handbook of the Law, Policy, and Regulation for Human–Robot Interaction; Barfield, W., Weng, Y.-H., Pagallo, U., Eds.; Cambridge Law Handbooks; Cambridge University Press: Cambridge, UK, 2024; pp. 84–99. [Google Scholar] [CrossRef]
- Calo, R. Robotics and the Lessons of Cyberlaw. Calif. Law Rev. 2015, 103, 513. [Google Scholar]
- Leenes, R.; Lucivero, F. Laws on robots, laws by robots, laws in robots: Regulating robot behaviour by design. Law Innov. Technol. 2014, 6, 193–220. [Google Scholar] [CrossRef]
- Kuteynikov, D.; Izhaev, O.; Lebedev, V.; Zenin, S. Legal regulation of artificial intelligence and robotic systems: Review of key approaches. Cuest. Políticas 2022, 40, 690–703. [Google Scholar] [CrossRef]
- Villaronga, E.F. Robots, standards and the law: Rivalries between private standards and public policymaking for robot governance. Comput. Law Secur. Rev. 2019, 35, 129–144. [Google Scholar] [CrossRef]
- Guerra, A.; Parisi, F.; Pi, D. Liability for robots I: Legal challenges. J. Inst. Econ. 2022, 18, 331–343. [Google Scholar]
- Simianu, V.V.; Gaertner, W.B.; Kuntz, K.; Kwaan, M.R.; Lowry, A.C.; Madoff, R.D.; Jensen, C.C. Cost-effectiveness evaluation of laparoscopic versus robotic minimally invasive colectomy. Ann. Surg. 2020, 272, 334–341. [Google Scholar] [CrossRef]
- Amaifeobu, O.; Iyamu, O.; Adewunmi, A. Opportunities and Barriers for Adopting Robotics in Nigerian Construction Industry. Int. J. Res. Publ. Rev. 2023, 4, 535–543. [Google Scholar]
- Tan, Y.J.; Susanto, G.J.; Anwar Ali, H.P.; Tee, B.C. Progress and Roadmap for Intelligent Self-Healing Materials in Autonomous Robotics. Adv. Mater. 2021, 33, 2002800. [Google Scholar] [CrossRef]
- Roh, Y.; Lee, Y.; Lim, D.; Gong, D.; Hwang, S.; Kang, M.; Kim, D.; Cho, J.; Kwon, G.; Kang, D.; et al. Nature’s Blueprint in Bioinspired Materials for Robotics. Adv. Funct. Mater. 2024, 34, 2306079. [Google Scholar] [CrossRef]
- Arents, J.; Greitans, M. Smart industrial robot control trends, challenges and opportunities within manufacturing. Appl. Sci. 2022, 12, 937. [Google Scholar] [CrossRef]
- Shmatko, N.; Volkova, G. Bridging the skill gap in robotics: Global and national environment. Sage Open 2020, 10, 2158244020958736. [Google Scholar] [CrossRef]
- Hardin, C.; Chaudhuri, P.; Elglaly, Y. Who Gets to Play with the Robot? Examining CS Education Tangibles and Accessibility. In Proceedings of the Society for Information Technology & Teacher Education International Conference (SITE 2022), New Orleans, LA, USA, 14–18 March 2022; pp. 1355–1364. Available online: https://www.learntechlib.org/primary/p/221136/ (accessed on 22 April 2025).
- Lorenz, E.; Kraemer-Mbula, E. Measuring frontier technology adoption in developing countries. In Handbook of Innovation Indicators and Measurement; Edward Elgar Publishing: Cheltenham, UK, 2023; pp. 260–277. [Google Scholar]
- Lohmann, S.; Yosinski, J.; Gold, E.; Clune, J.; Blum, J.; Lipson, H. Aracna: An open-source quadruped platform for evolutionary robotics. In Proceedings of the Artificial Life Conference Proceedings, East Lansing, MI, USA, 19–22 July 2012; MIT Press: Cambridge, MA, USA, 2012; pp. 387–392. [Google Scholar]
- Mudalige, N.D.W.; Zhura, I.; Babataev, I.; Nazarova, E.; Fedoseev, A.; Tsetserukou, D. HyperDog: An Open-Source Quadruped Robot Platform Based on ROS2 and micro-ROS. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 436–441. [Google Scholar] [CrossRef]
- Donhauser, J.; van Wynsberghe, A.; Bearden, A. Steps toward an ethics of environmental robotics. Philos. Technol. 2021, 34, 507–524. [Google Scholar] [CrossRef]
- Hussain, K.; Omar, Z.; Wang, X.; Adewale, O.O.; Elnour, M. Analysis and research of quadruped robot’s actuators: A review. Int. J. Mech. Eng. Robot. Res. 2021, 10, 436–442. [Google Scholar] [CrossRef]
- Costa, C.M.; Barbosa, J.C.; Gonçalves, R.; Castro, H.; Del Campo, F.; Lanceros-Méndez, S. Recycling and environmental issues of lithium-ion batteries: Advances, challenges and opportunities. Energy Storage Mater. 2021, 37, 433–465. [Google Scholar] [CrossRef]
- Nadzri, M.M.M. Design issues and considerations for hardware implementation of wildlife surveillance system: A review. J. Tomogr. Syst. Sens. Appl. 2021, 4, 82–94. [Google Scholar]
- Hartmann, F.; Baumgartner, M.; Kaltenbrunner, M. Becoming sustainable, the new frontier in soft robotics. Adv. Mater. 2021, 33, 2004413. [Google Scholar] [CrossRef]
- Chellapurath, M.; Khandelwal, P.C.; Schulz, A.K. Bioinspired robots can foster nature conservation. Front. Robot. AI 2023, 10, 1145798. [Google Scholar] [CrossRef] [PubMed]
- Cannon, C.H.; Borchetta, C.; Anderson, D.L.; Arellano, G.; Barker, M.; Charron, G.; LaMontagne, J.M.; Richards, J.H.; Abercrombie, E.; Banin, L.F.; et al. Extending our scientific reach in arboreal ecosystems for research and management. Front. For. Glob. Change 2021, 4, 712165. [Google Scholar] [CrossRef]
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef]
- Balaganesan, S.M.; Abishek, S.; Aravinth, R.; Maignanamoorthy, A.S.N. Solar Based Grass Cutter Robot. In Proceedings of the 2023 Second International Conference on Augmented Intelligence and Sustainable Systems (ICAISS 2023), Trichy, India, 23–25 August 2023; pp. 1676–1680. [Google Scholar] [CrossRef]
- Campazas-Vega, A.; Miguel-Diez, A.; Hermida-López, M.; Álvarez-Aparicio, C.; Crespo-Martínez, I.S.; Guerrero-Higueras, Á.M. Cybersecurity Issues in Robotic Platforms. In Proceedings of the 14th International Conference on Business Information Security (BISEC 2023), Niš, Serbia, 24 November 2023; CEUR Workshop Proceedings. Volume 3676, pp. 4–11. [Google Scholar]
- Botta, A.; Rotbei, S.; Zinno, S.; Ventre, G. Cyber security of robots: A comprehensive survey. Intell. Syst. Appl. 2023, 18, 200237. [Google Scholar] [CrossRef]
- Yaacoub, J.P.A.; Noura, H.N.; Salman, O.; Chehab, A. Robotics cyber security: Vulnerabilities, attacks, countermeasures, and recommendations. Int. J. Inf. Secur. 2022, 21, 115–158. [Google Scholar] [CrossRef] [PubMed]
- Breiling, B.; Dieber, B.; Schartner, P. Secure Communication for the Robot Operating System. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, H.; Shi, M.; Xia, Y.; Zhang, P. Security research on wireless networked control systems subject to jamming attacks. IEEE Trans. Cybern. 2018, 49, 2022–2031. [Google Scholar] [CrossRef] [PubMed]
- Pirayesh, H.; Zeng, H. Jamming attacks and anti-jamming strategies in wireless networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2022, 24, 767–809. [Google Scholar] [CrossRef]
- Madder, R.D.; VanOosterhout, S.; Mulder, A.; Bush, J.; Martin, S.; Rash, A.J.; Tan, J.M.; Parker, J.L.; Kalafut, A.; Li, Y.; et al. Network latency and long-distance robotic telestenting: Exploring the potential impact of network delays on telestenting performance. Catheter. Cardiovasc. Interv. 2020, 95, 914–919. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Fan, T.; Zhao, X.; Liang, J.; Shen, C.; Chen, H.; Manocha, D.; Pan, J.; Zhang, W. Autonomous social distancing in urban environments using a quadruped robot. IEEE Access 2021, 9, 8392–8403. [Google Scholar] [CrossRef]
- Farouk, M. Studying Human Robot Interaction and Its Characteristics. Int. J. Comput. Inf. Manuf. 2022, 2, 4–11. [Google Scholar] [CrossRef]
- Hashimoto, N.; Hagens, E.; Zgonnikov, A.; Lupetti, M.L. Safe Spot: Perceived safety of dominant and submissive appearances of quadruped robots in human-robot interactions. arXiv 2024, arXiv:2403.05400. [Google Scholar]
- Fu, X.; Deng, C.; Guerrieri, A. Low-AoI data collection in integrated UAV-UGV-assisted IoT systems based on deep reinforcement learning. Comput. Netw. 2025, 259, 111044. [Google Scholar] [CrossRef]
- Wang, T.; Fu, X.; Guerrieri, A. Joint resource scheduling and flight path planning of UAV-assisted IoTs in response to emergencies. Comput. Netw. 2024, 253, 110731. [Google Scholar] [CrossRef]
- Doriya, R.; Mishra, S.; Gupta, S. A Brief Survey and Analysis of Multi-Robot Communication and Coordination. In Proceedings of the 2015 International Conference on Computing, Communication and Automation (ICCCA), Noida, India, 15–16 May 2015; pp. 1014–1021. [Google Scholar] [CrossRef]
- Abhang, L.B.; Gummadi, A.; Changala, R.; Vuyyuru, V.A.; Sabareesh, R.; Raj, I.I. Swarm Intelligence for Multi-Robot Coordination in Agricultural Automation. In Proceedings of the 2024 10th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 14–15 March 2024; Volume 1, pp. 455–460. [Google Scholar] [CrossRef]
- Yousaf, A.W.; Di Caro, G.A. Data Sharing and Assimilation in Multi-Robot Systems for Environment Mapping. In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), Lieusaint, France, 6–8 July 2021; pp. 514–522. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Hoshino, Y.; Kobayashi, Y. On sharing spatial data with uncertainty integration amongst multiple robots having different maps. Appl. Sci. 2019, 9, 2753. [Google Scholar] [CrossRef]
- Nguyen, L.V. Swarm Intelligence-Based Multi-Robotics: A Comprehensive Review. AppliedMath 2024, 4, 1192–1210. [Google Scholar] [CrossRef]
- Buerkle, A.; Eaton, W.; Al-Yacoub, A.; Zimmer, M.; Kinnell, P.; Henshaw, M.; Coombes, M.; Chen, W.H.; Lohse, N. Towards industrial robots as a service (IRaaS): Flexibility, usability, safety and business models. Robot. Comput.-Integr. Manuf. 2023, 81, 102484. [Google Scholar] [CrossRef]
- Obaigbena, A.; Lottu, O.A.; Ugwuanyi, E.D.; Jacks, B.S.; Sodiya, E.O.; Daraojimba, O.D. AI and human-robot interaction: A review of recent advances and challenges. GSC Adv. Res. Rev. 2024, 18, 321–330. [Google Scholar] [CrossRef]

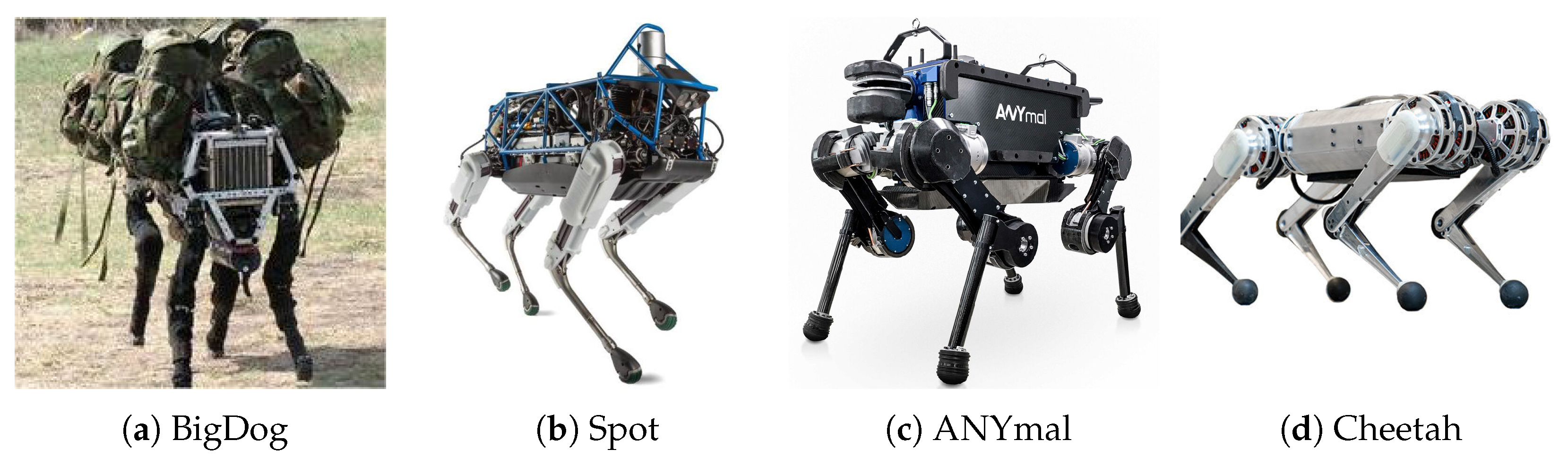

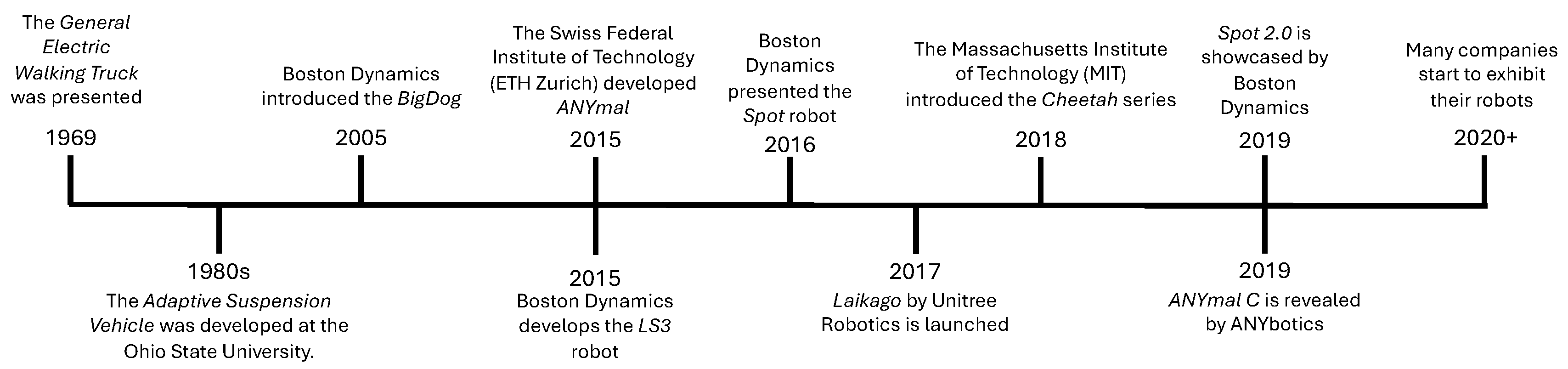




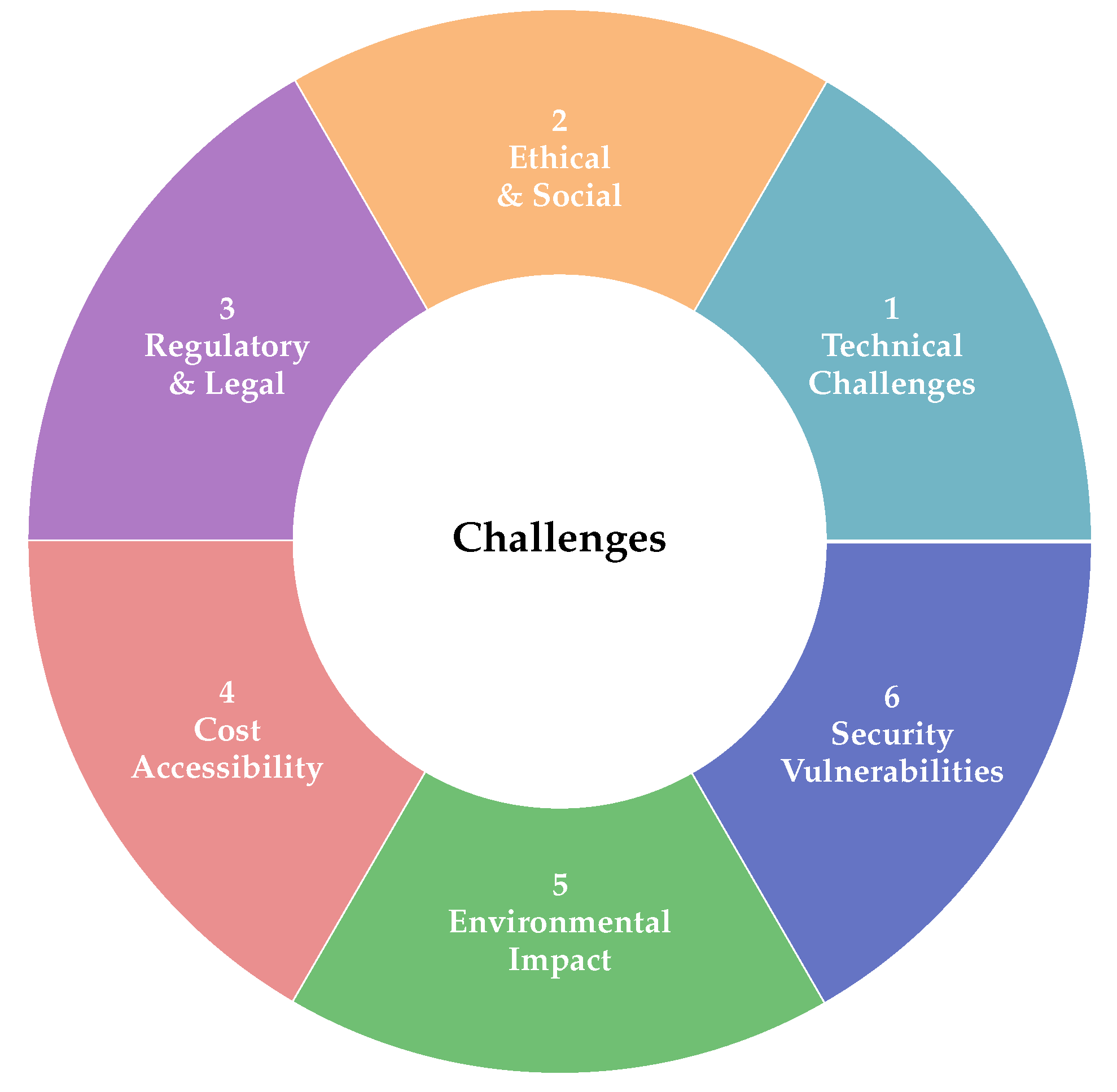

| Ref. | Year | Summary |
|---|---|---|
| [19] | 2020 | Comprehensively reviews high-dynamic motion capabilities and structural and control technologies in legged robots for versatile tasks. |
| [20] | 2021 | Explores quadrupedal robots’ historical evolution and modern capabilities, including mobility planning and environmental sensing. |
| [21] | 2021 | Discusses bio-inspired designs, sensors, and algorithms in robotics, emphasizing challenges and innovations in adaptive and efficient behaviors. |
| [22] | 2021 | Examines driving modes of quadrupedal robots, comparing hydraulic and motor-driven systems for task-specific efficiency. |
| [23] | 2022 | Analyzes quadrupedal robot design, control, and operational advancements, including task adaptability and multi-functional mechanisms. |
| [24] | 2022 | Reviews localization, mapping, and trajectory planning for quadrupedal robots in vineyards, highlighting challenges in unstructured terrains. |
| [25] | 2022 | Provides a comparative anatomical study of quadrupedal robots and animals, emphasizing structural and functional differences to inspire future robot designs. |
| [26] | 2023 | Analyzes mechanisms, energy optimization, gait planning, and intelligent sensing, emphasizing practical efficiency and future directions. |
| [27] | 2023 | Systematically reviews intelligent control methods for smooth motion in legged robots, focusing on planning, stability, and learning models. |
| [28] | 2023 | Comprehensively reviews quadrupedal mobile robots, focusing on key mechanisms, gait planning, dynamic control, and future applications. |
| [29] | 2024 | Details the design, locomotion, and potential applications of quadrupedal robots, with a focus on adaptability to rugged terrains. |
| [30] | 2024 | Focuses on integrating wearable electronics into quadrupedal robots to enhance sensing, adaptability, and operational capabilities. |
| [11] | 2024 | Highlights advancements, challenges, and future perspectives in quadrupedal robots, focusing on control paradigms, energy efficiency, and cognitive capabilities. |
| [31] | 2024 | Discusses challenges, control techniques, and emerging technologies for next-generation legged robots, focusing on robust navigation, adaptability, and energy efficiency. |
| Time Period | Primary Applications | Technological Drivers | Notable Examples |
|---|---|---|---|
| 1960–1980 | Research and Demonstration | Basic mechanical design, foundational locomotion theories | General Electric Walking Truck (1969) |
| 1980 | Experimental Prototypes | Advances in control systems, rudimentary sensors | Adaptive Suspension Vehicle (ASV), Ohio State Univ. |
| 2000 | Military Logistics | Hydraulic actuators, onboard computing, dynamic balance control | BigDog (2005), Boston Dynamics |
| 2010–2015 | Industrial Inspection, Advanced Research | Electric actuators, sensor fusion, AI integration, autonomous navigation | LS3 (2012), Boston Dynamics; ANYmal (2015), ETH Zurich |
| 2016–2018 | Commercial Services, Entertainment, Academic Research | Cost reduction, machine learning algorithms, improved batteries | Spot (2016), Boston Dynamics; Laikago (2017), Unitree Robotics; Mini Cheetah (2018), MIT |
| 2019–Present | Public Safety, Construction, Healthcare, Education | Enhanced autonomy, cloud computing, 5G connectivity, human-robot interaction | Spot 2.0 (2019), Boston Dynamics; ANYmal C (2019), ANYbotics; AlienGo (2019), Unitree Robotics; Vision 60 (2020), Ghost Robotics |
| Feature | Articulated Legs | Compliant Legs | Rigid Legs |
|---|---|---|---|
| Structure | Multiple actively controlled joints (hip, knee, ankle) | Integration of elastic elements (springs, tendons) | Rigid links without dedicated compliance |
| Adaptability to Terrain | High (flexible joint movements) | Moderate (passive adaptation) | Low (requires precise control) |
| Energy Efficiency | Moderate | High (energy storage and return) | Low |
| Impact Mitigation | Active control strategies needed | Passive shock absorption | Limited, requires fast feedback control |
| Control Complexity | High (multi-DoF coordination) | Moderate (reduced control needs) | Low (simpler kinematic control) |
| Mechanical Complexity | High | Moderate | Low |
| Typical Examples | MIT Cheetah [44] | RHex [45] | Early quadrupeds [46] |
| Power Source | Advantages | Limitations | Typical Use Cases |
|---|---|---|---|
| Lithium-Ion Battery [38,74,75] | High energy density and lightweight Rechargeable and widely available | Limited operational time (1–3 h) Sensitive to temperature variations | Suitable for lightweight robots used in indoor and short-term outdoor applications, e.g., inspection robots like Spot. |
| Fuel Cell [76,77,78] | Extremely high energy density (800–1000 Wh/kg) Long operational time (8–12 h) | High cost and complex maintenance Requires hydrogen storage and refueling infrastructure | Ideal for long-duration missions in remote areas, e.g., exploration or disaster response tasks. |
| Hybrid System [79,80,81] | Combines benefits of batteries and fuel cells Provides steady energy with bursts of high power | Increased weight due to dual power systems Higher system complexity | Useful for tasks requiring dynamic performance and longer operational time, e.g., search and rescue operations. |
| Category | Algorithms and References | Advantages | Applications |
|---|---|---|---|
| SLAM (Simultaneous Localization and Mapping) | LiDAR-based SLAM (e.g., LOAM) [102], Visual SLAM (e.g., ORB-SLAM) [103], RGB-D SLAM [104], Graph-based SLAM [105], Learning-based SLAM [106] | Real-time mapping and localization, robust in GPS-denied environments, high accuracy in diverse terrains | Autonomous navigation, exploration of unknown or dynamic environments, search and rescue operations |
| Terrain Perception and Classification | Depth-based footstep planning [107], proprioceptive-based classification (RNN, CNN) [108], audio-based terrain recognition [109] | Adapts gait in real-time, improves stability on varied surfaces, reduces need for manual feature engineering | Off-road exploration, agricultural applications, long-distance field autonomy |
| Object Recognition and Interaction | CNN-based detection (e.g., Faster R-CNN, YOLO) [110], RGB-D object recognition [111], semantic segmentation (FCN, SegNet) [112,113] | High accuracy in object detection, depth cues improve pose estimation, enables complex manipulation tasks | Pick-and-place, inspection and maintenance, human-robot collaboration |
| Obstacle Detection and Avoidance | Sensor fusion (LiDAR + vision) [114,115], ultrasonic-based detection [116], depth camera-based avoidance [111] | Multi-modal data for robust detection, real-time collision avoidance, suitable for unstructured or dynamic settings | Indoor/outdoor navigation, disaster response, warehouse logistics |
| Path Planning | A* [117], RRT/RRT* [118,119], Dynamic Window Approach (DWA) [120], Probabilistic Roadmaps (PRM) [121] | Efficient route computation, handles kinodynamic constraints, adaptable to real-time changes | Complex terrain navigation, urban search and rescue, autonomous exploration |
| Human-Robot Interaction (HRI) | Communication interfaces (visual, auditory, tactile) [122,123], safety algorithms (collision avoidance) [124], emotion recognition and expression [125] | Enhances user trust and acceptance, facilitates intuitive operation, ensures safety and comfort | Assistive robotics, collaborative tasks in shared spaces, search and rescue with remote teleoperation |
| Machine Learning for Perception and Decision-Making | RL [126,127], supervised learning (CNN, RNN) [108,128], unsupervised learning (Autoencoder, GAN) [129,130] | Learns adaptive and robust policies, reduces reliance on hand-engineered features, generalizes to new tasks or terrains | Gait optimization, terrain classification, complex manipulation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Cicirelli, F.; Vinci, A.; Guerrieri, A.; Qi, W.; Fortino, G. Quadruped Robots: Bridging Mechanical Design, Control, and Applications. Robotics 2025, 14, 57. https://doi.org/10.3390/robotics14050057
Li Q, Cicirelli F, Vinci A, Guerrieri A, Qi W, Fortino G. Quadruped Robots: Bridging Mechanical Design, Control, and Applications. Robotics. 2025; 14(5):57. https://doi.org/10.3390/robotics14050057
Chicago/Turabian StyleLi, Qimeng, Franco Cicirelli, Andrea Vinci, Antonio Guerrieri, Wen Qi, and Giancarlo Fortino. 2025. "Quadruped Robots: Bridging Mechanical Design, Control, and Applications" Robotics 14, no. 5: 57. https://doi.org/10.3390/robotics14050057
APA StyleLi, Q., Cicirelli, F., Vinci, A., Guerrieri, A., Qi, W., & Fortino, G. (2025). Quadruped Robots: Bridging Mechanical Design, Control, and Applications. Robotics, 14(5), 57. https://doi.org/10.3390/robotics14050057