The Thorvald II Agricultural Robotic System

Abstract
:1. Introduction
1.1. Current State-of-The-Art
1.2. Hardware and Software Modularity
2. Materials and Methods
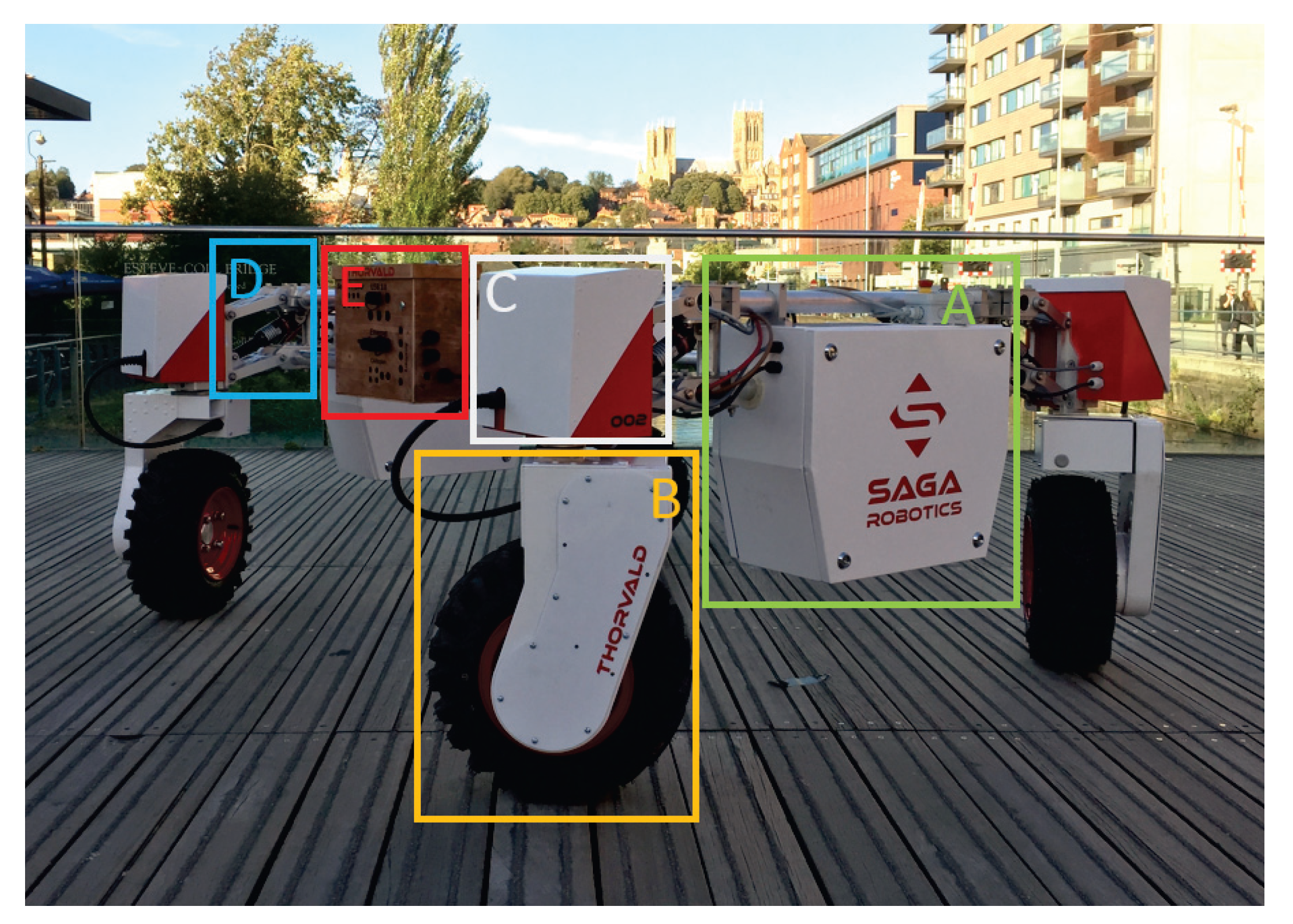
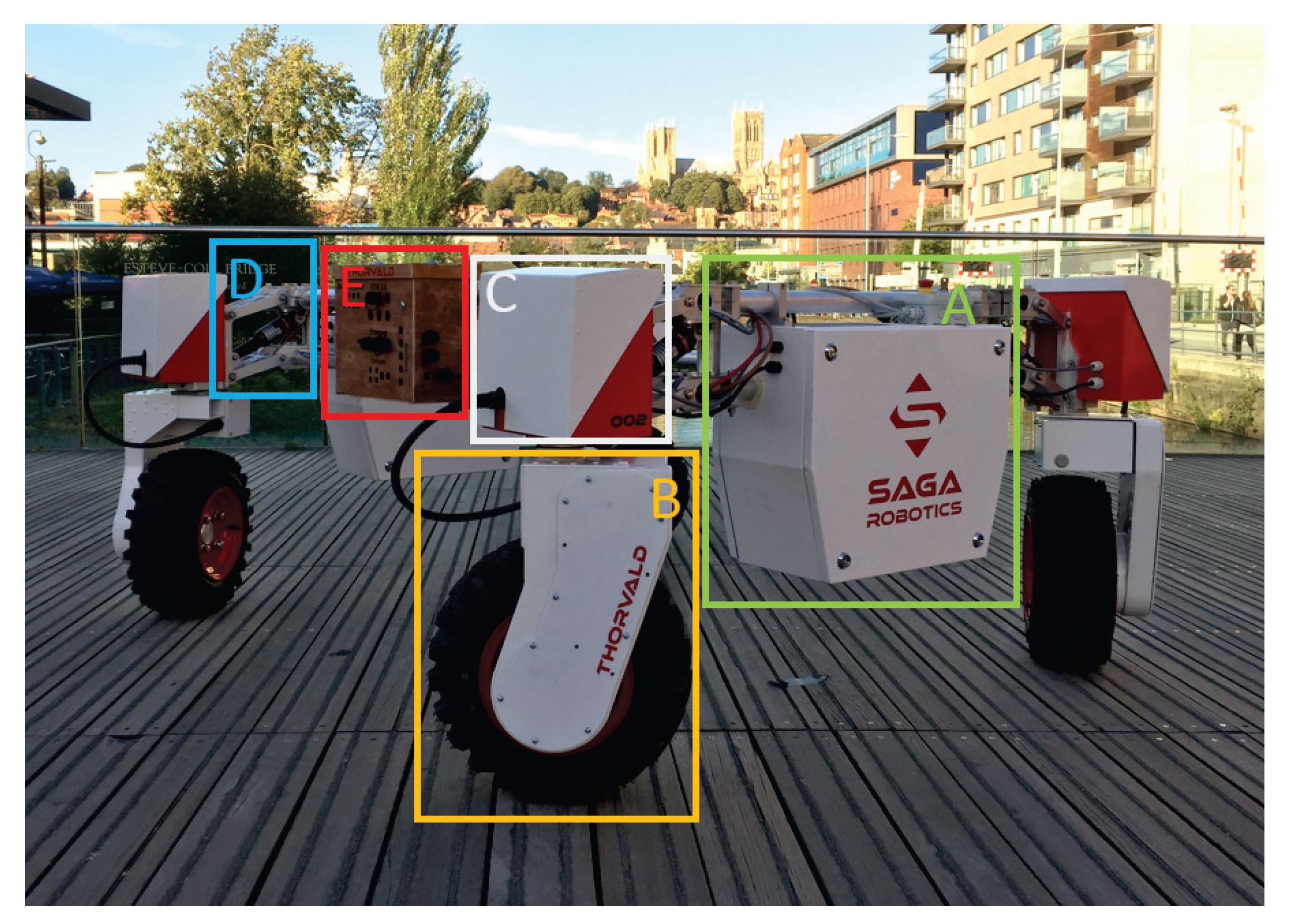
2.1. Module Design
2.1.1. Robot Frame
2.1.2. Battery Enclosure
2.1.3. Drive Module
2.1.4. Steering Module
2.1.5. Suspension Module
2.1.6. Passive Wheel Modules
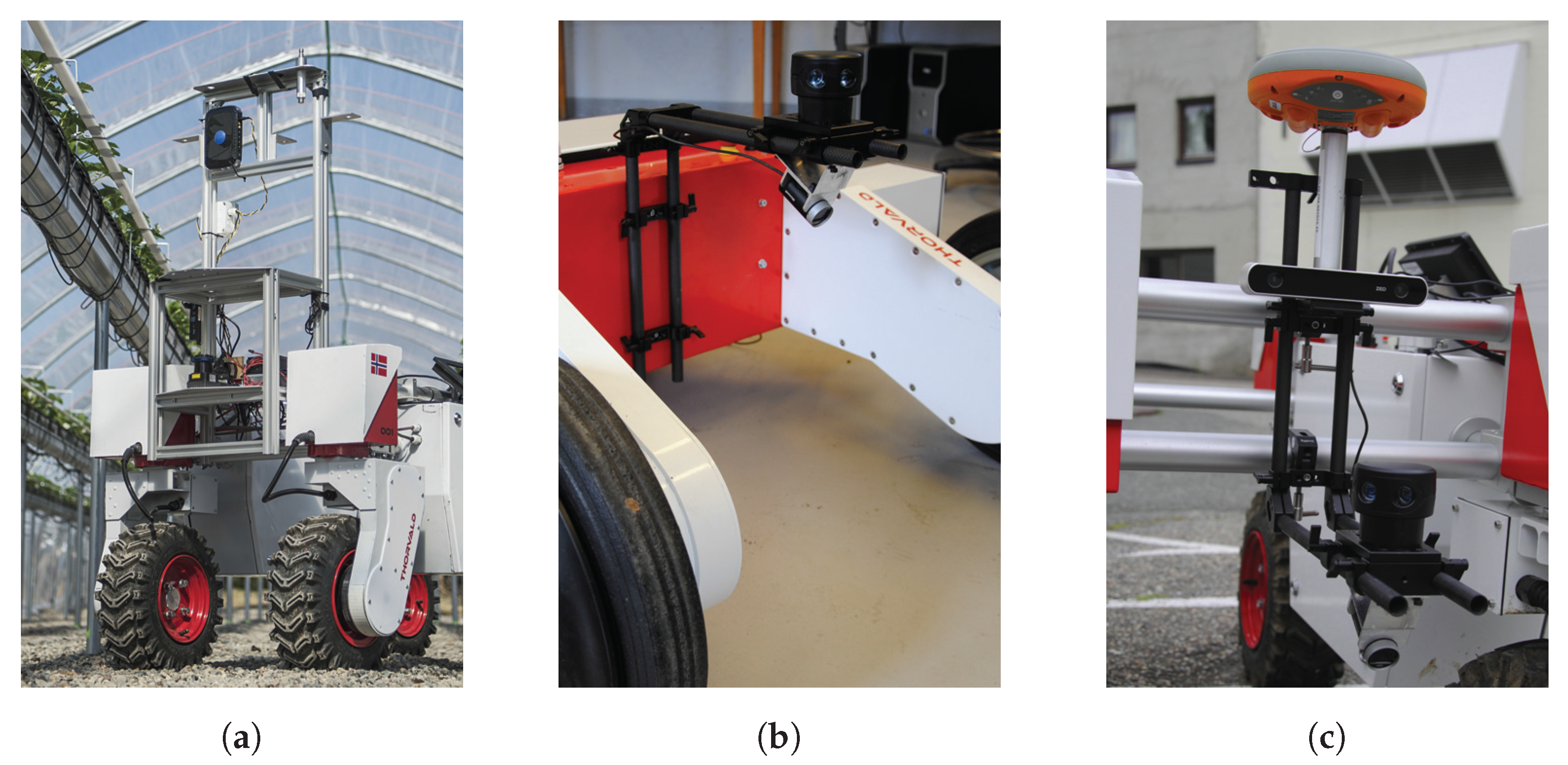
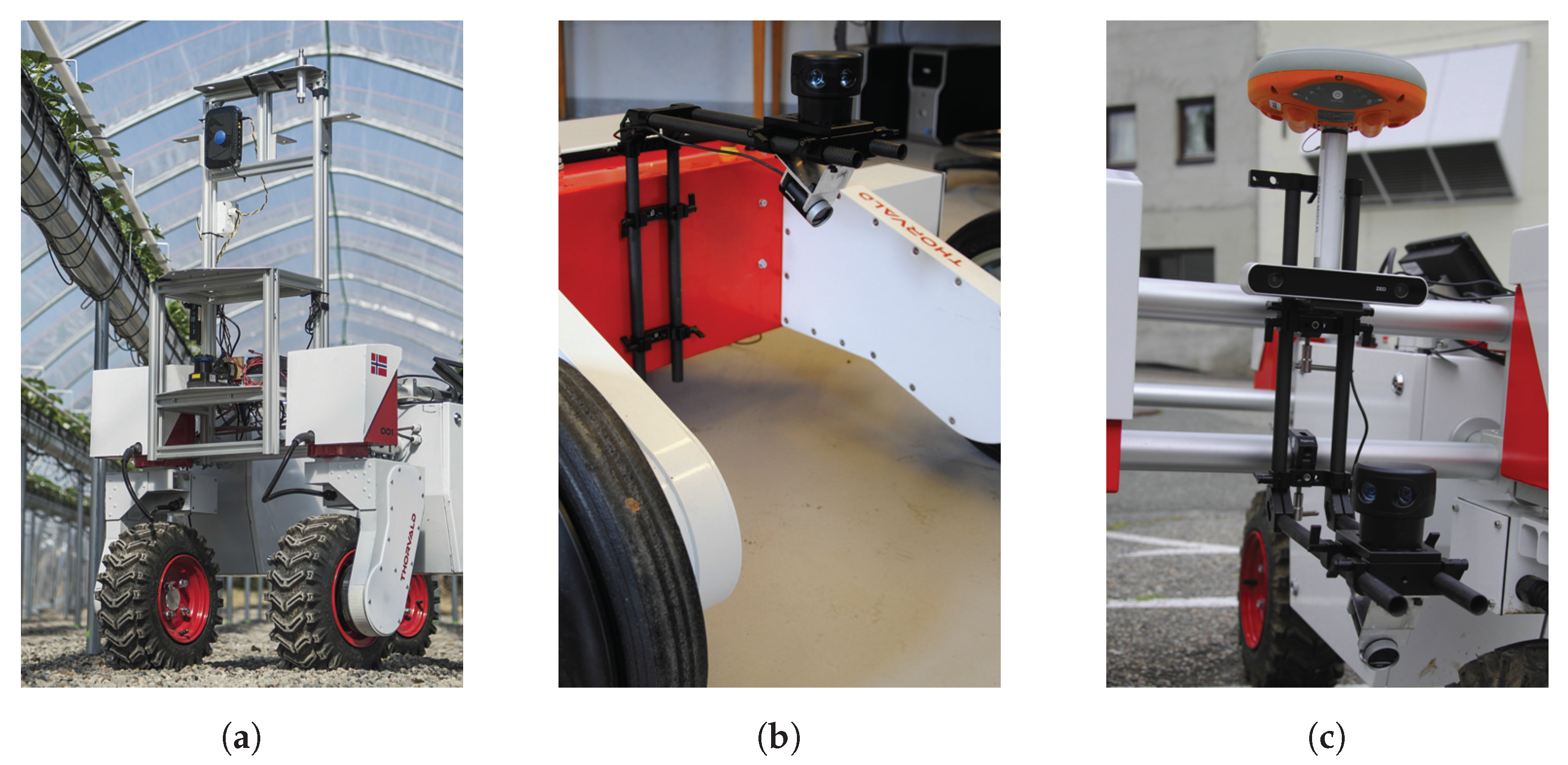
2.1.7. Modules for Sensors
2.2. Electric System
2.3. Software
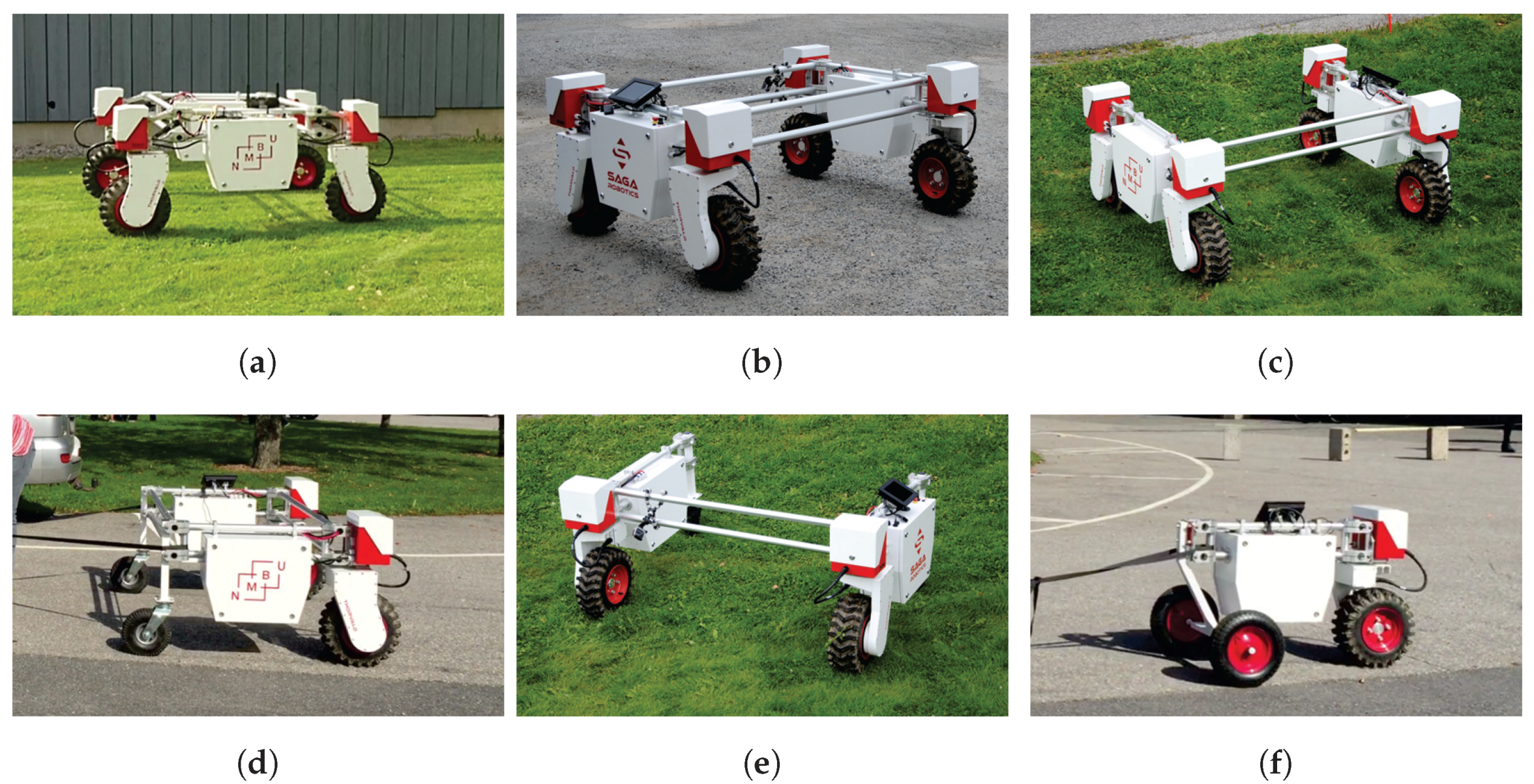
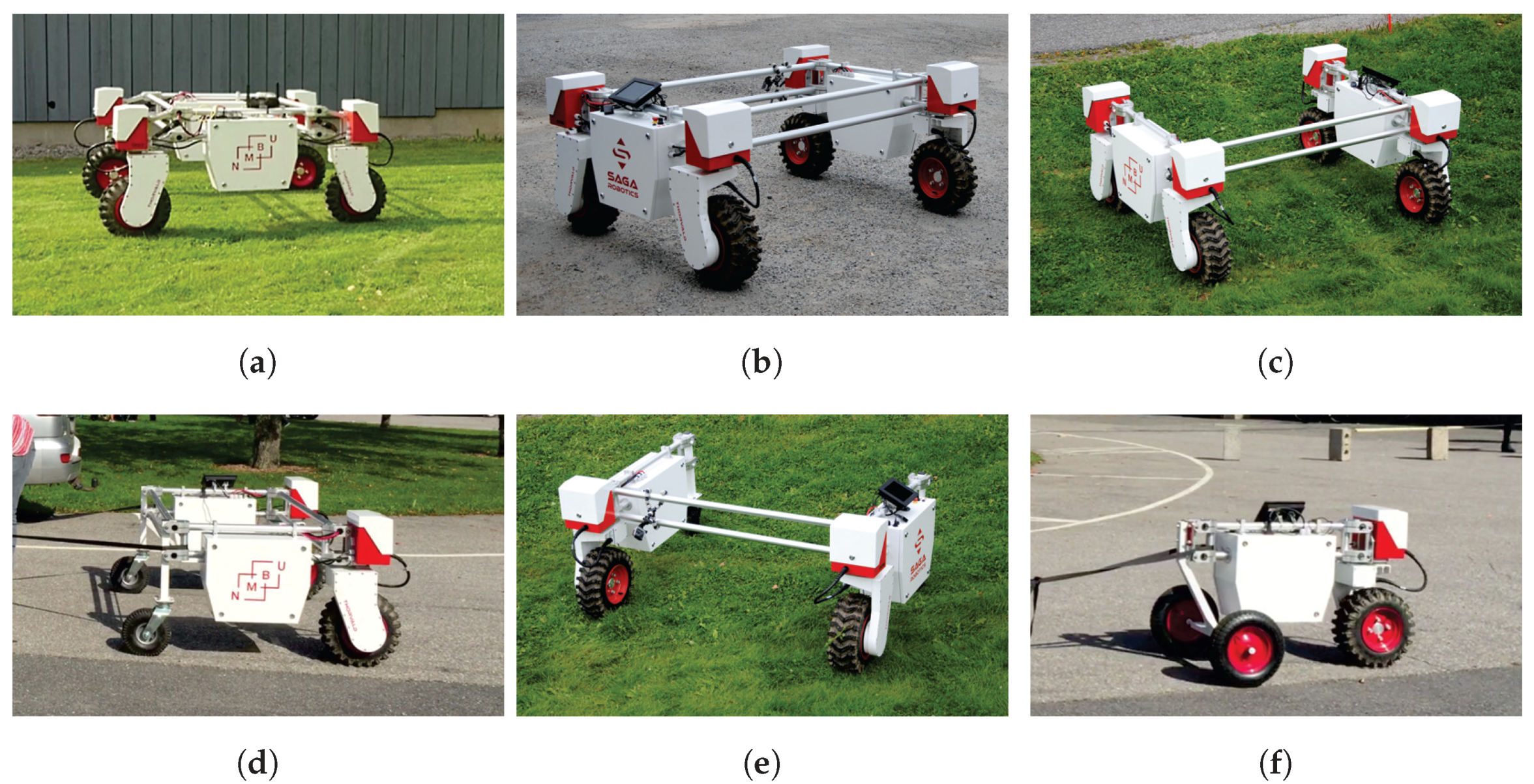
2.4. Robot Configurations and Current Applications
2.4.1. Standard Configuration
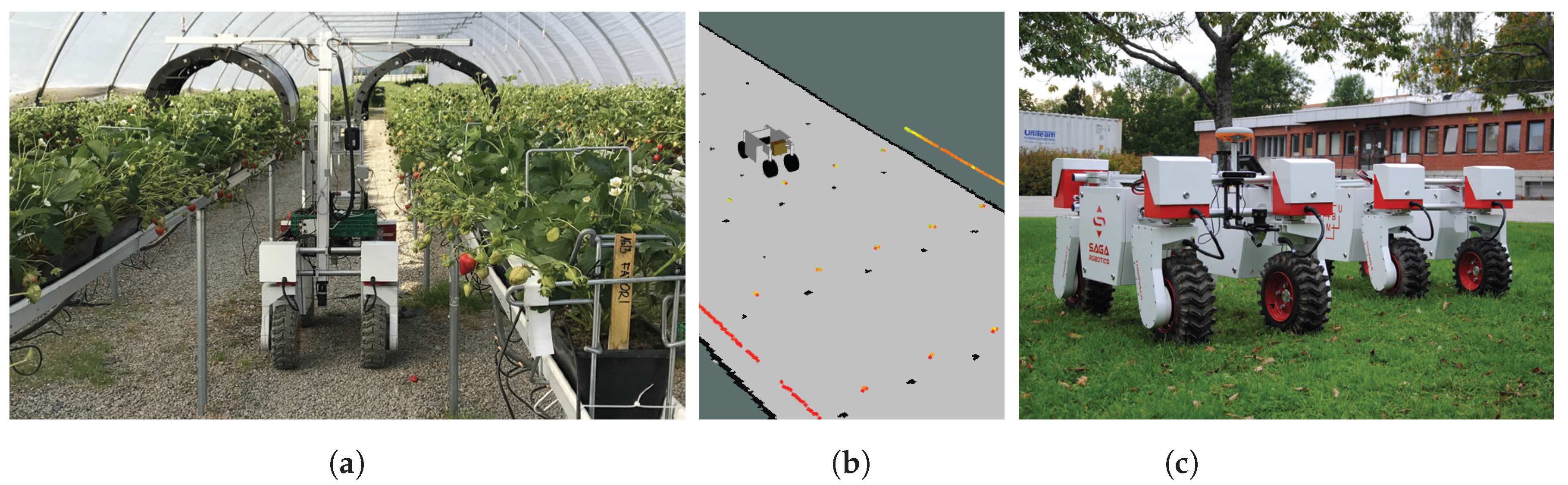
2.4.2. Narrow Configuration for Polytunnels
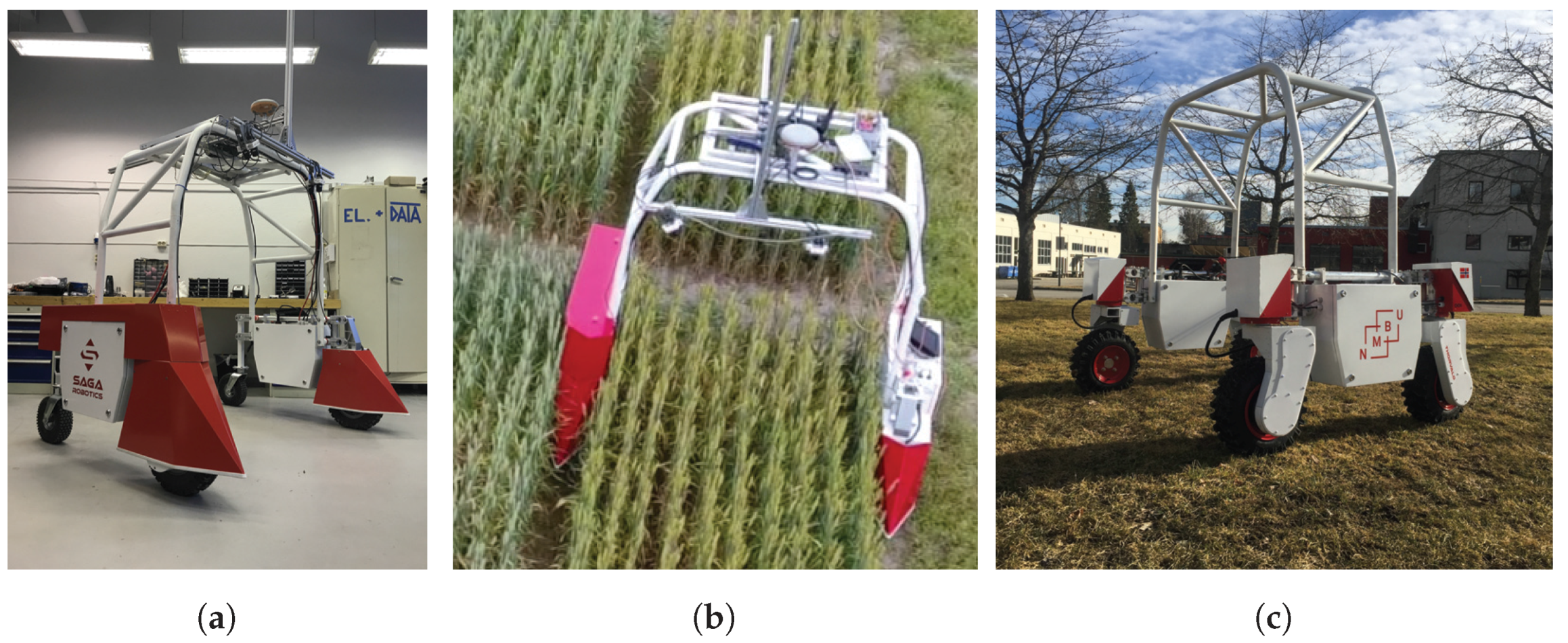
2.4.3. Tall Configuration for Wheat Phenotyping
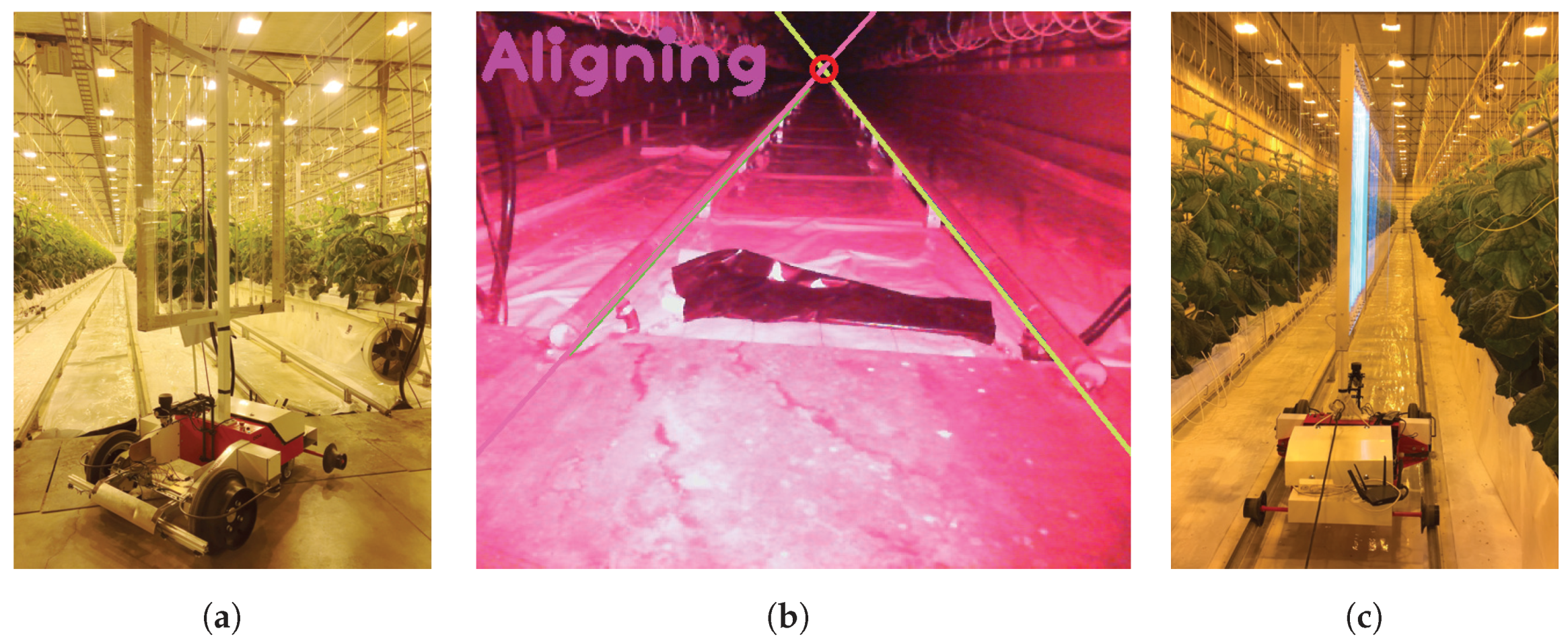
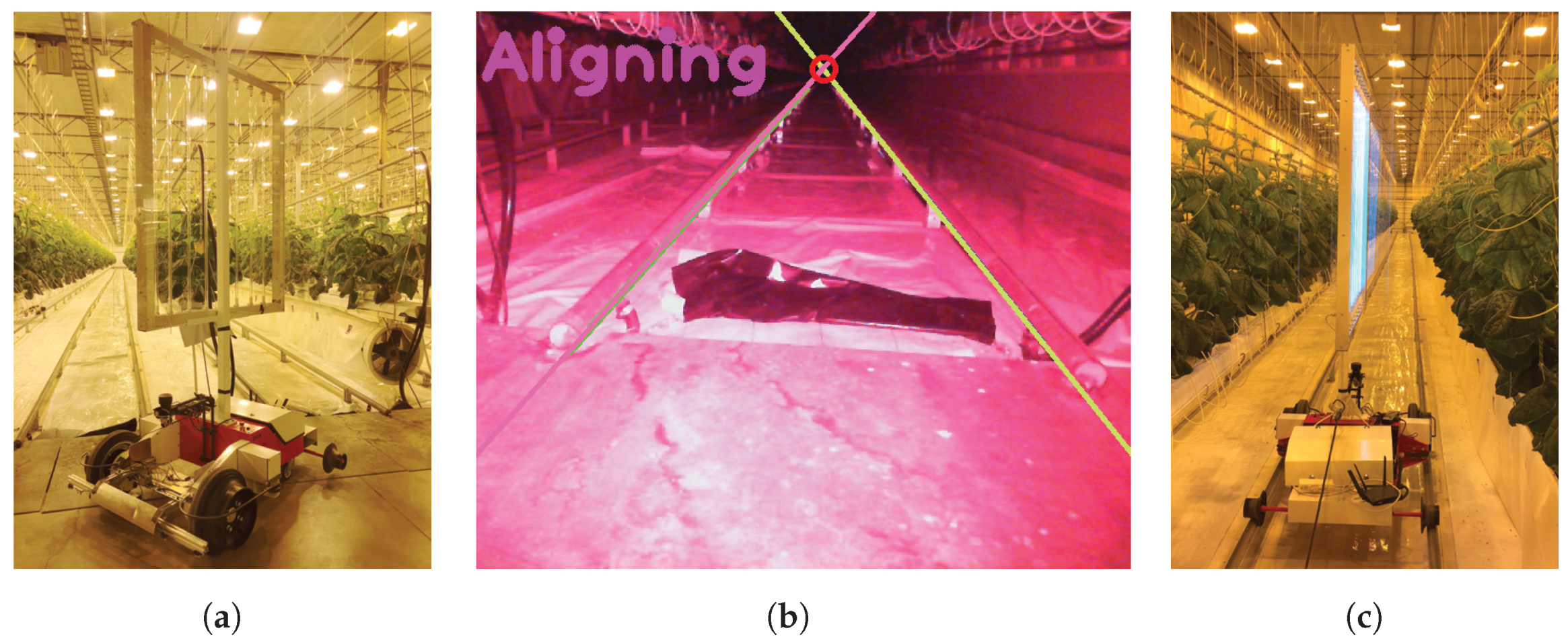
2.4.4. Configuration for Greenhouses
2.5. Field Trials
2.5.1. Traction Test
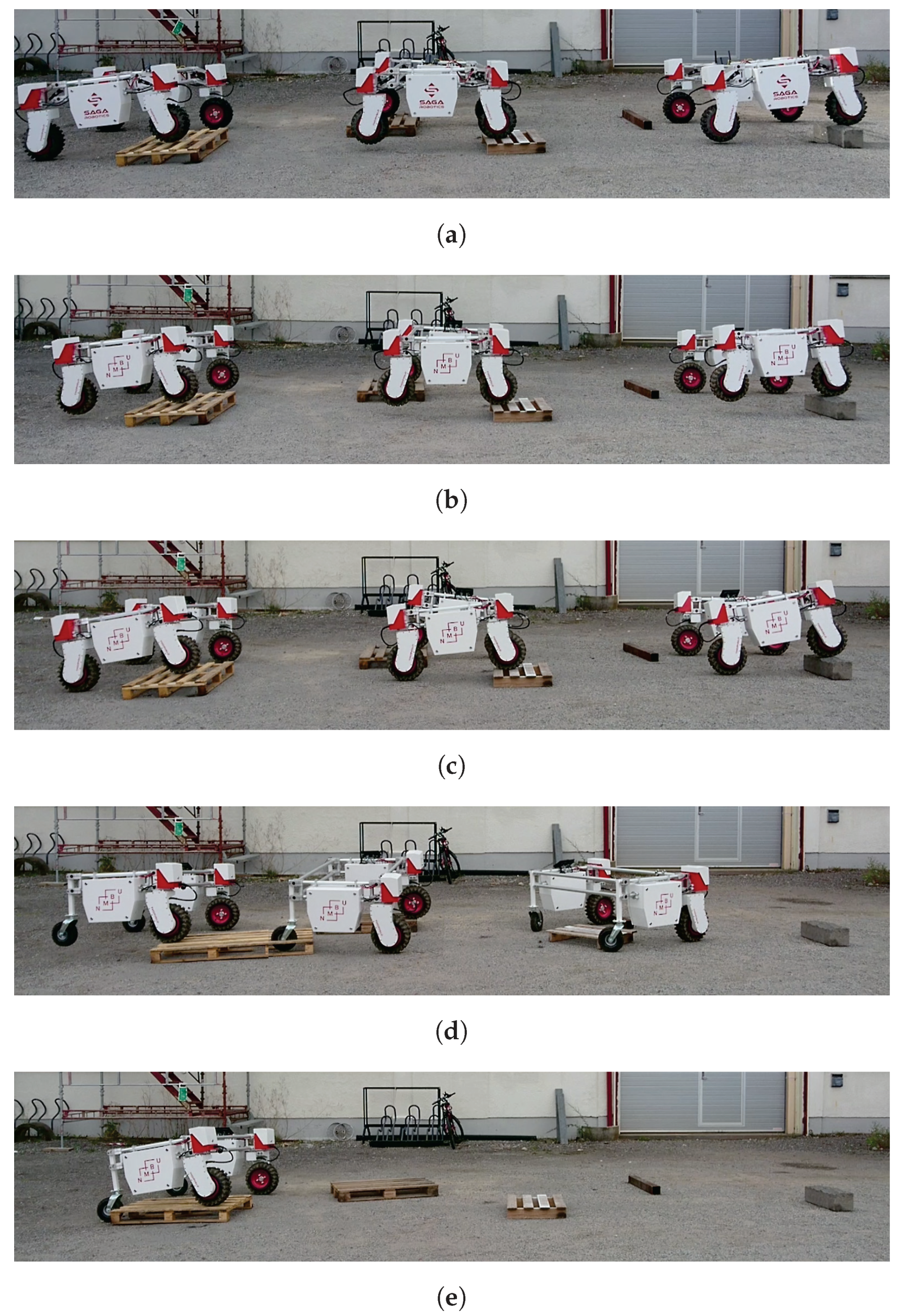
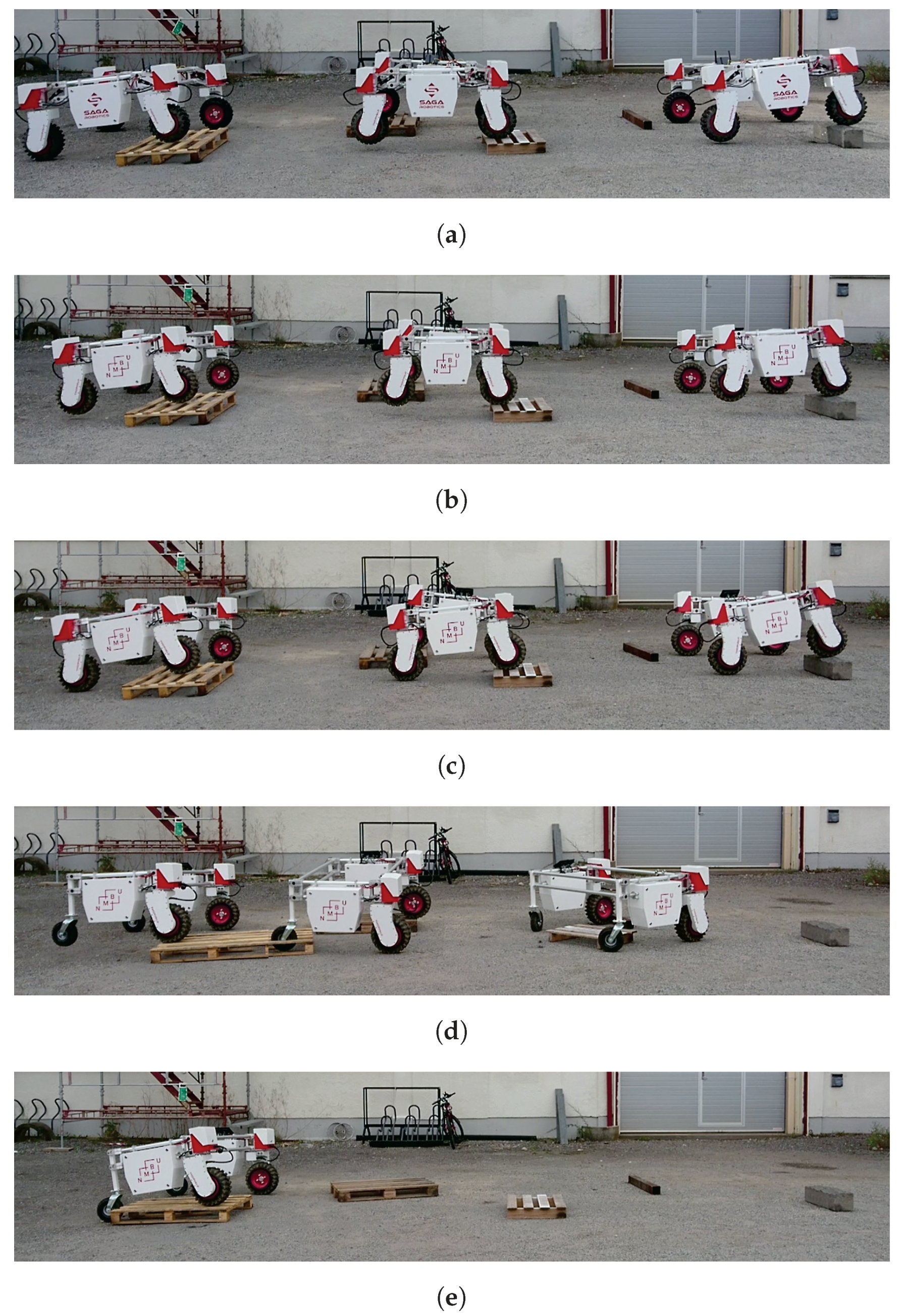
2.5.2. Passing over Obstacles
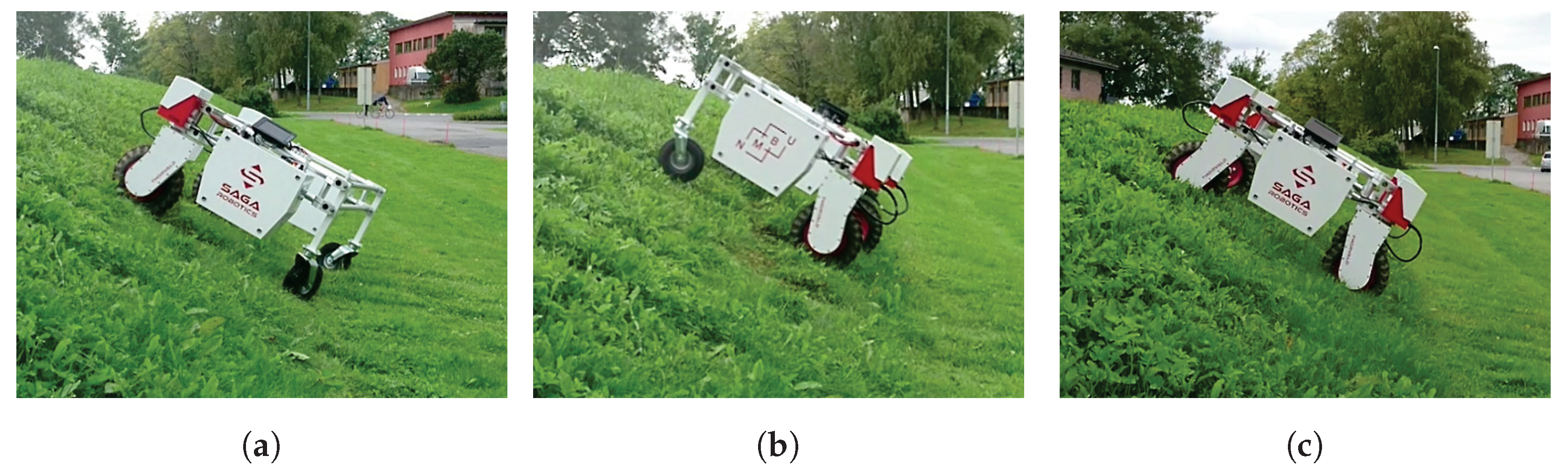
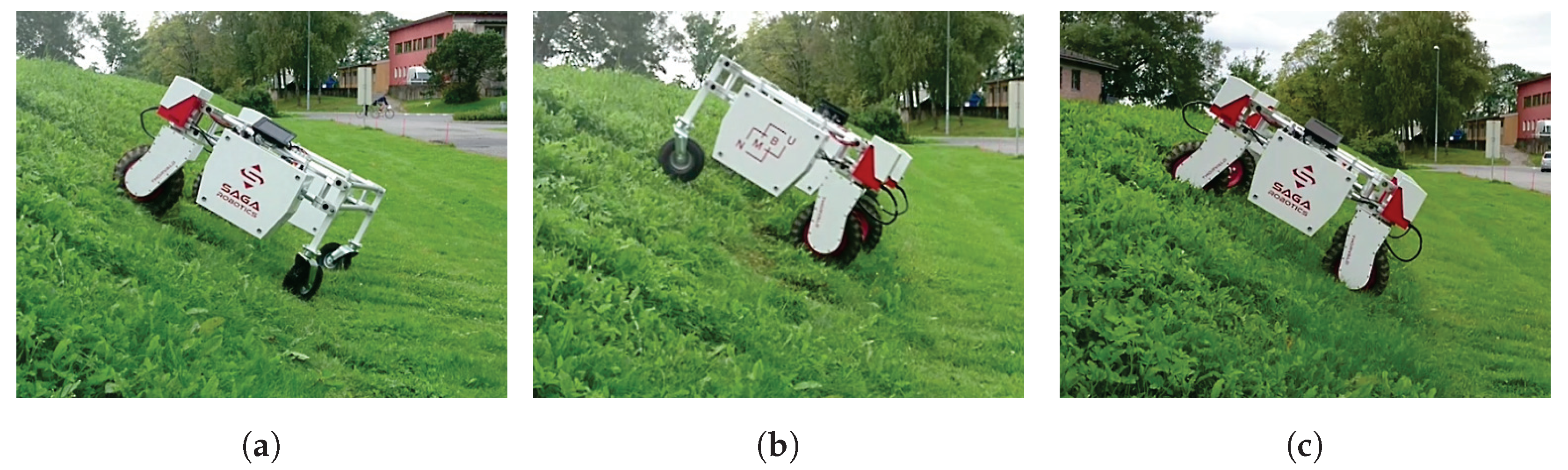
2.5.3. Incline Test
3. Results
3.1. Traction Test
3.2. Passing over Obstacles
3.3. Incline Test
4. Discussion
Field Trials
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CAN | Controller Area Network |
| LED | Light Emitting Diode |
| DC | Direct Current |
| BMS | Battery Management System |
| SOC | State of Charge |
| 4WD | Four-Wheel Drive |
| 4WS | Four-Wheel Steering |
| RTK | Real-Time Kinematic |
| GNSS | Global Navigation Satellite System |
References
- Lowder, S.K.; Skoet, J.; Raney, T. The Number, Size, and Distribution of Farms, Smallholder Farms, and Family Farms Worldwide. World Dev. 2016, 87, 16–29. [Google Scholar] [CrossRef]
- Batey, T. Soil compaction and soil management—A review. Soil Use Manag. 2009, 25, 335–345. [Google Scholar] [CrossRef]
- Nawaz, M.; Bourrié, G.; Trolard, F. Soil compaction impact and modelling. A review. Agron. Sustain. Dev. 2013, 33, 291–309. [Google Scholar] [CrossRef]
- Ruckelshausen, A.; Biber, P.; Dorna, M.; Gremmes, H.; Klose, R.; Linz, A.; Rahe, F.; Resch, R.; Thiel, M.; Trautz, D.; et al. BoniRob—An autonomous field robot platform for individual plant phenotyping. In Proceedings of the European Conference on Precision Agriculture, Wageningen, The Netherlands, 6–8 July 2009; pp. 841–847. [Google Scholar]
- Bangert, W.; Kielhorn, A.; Rahe, F.; Albert, A.; Biber, P.; Grzonka, S.; Haug, S.; Michaels, A.; Mentrup, D.; Hänsel, M.; et al. Field-Robot-Based Agriculture: ”RemoteFarming. 1” and “BoniRob-Apps”. In Proceedings of the 71th Conference Land. Technik—AgEng 2013, Hannover, Germany, 8–9 November 2013; pp. 439–445. [Google Scholar]
- Underwood, J.P.; Calleija, M.; Taylor, Z.; Hung, C.; Nieto, J.; Fitch, R.; Sukkarieh, S. Real-time target detection and steerable spray for vegetable crops. In Proceedings of the International Conference on Robotics and Automation: Robotics in Agriculture Workshop, Seattle, WA, USA, 25–30 May 2015. [Google Scholar]
- Bawden, O.; Ball, D.; Kulk, J.; Perez, T.; Russell, R. A lightweight, modular robotic vehicle for the sustainable intensification of agriculture. In Proceedings of the Australian Conference on Robotics and Automation (ACRA 2014), Melbourne, Australia, 2–4 December 2014; Australian Robotics & Automation Association ARAA: Broadway, Australia, 2014. [Google Scholar]
- Jensen, K.; Larsen, M.; Nielsen, S.H.; Larsen, L.B.; Olsen, K.S.; Jørgensen, R.N. Towards an Open Software Platform for Field Robots in Precision Agriculture. Robotics 2014, 3, 207–234. [Google Scholar] [CrossRef] [Green Version]
- Arbo, M.H.; Utstumo, T.; Brekke, E.; Gravdahl, J.T. Unscented Multi-Point Smoother for Fusion of Delayed Displacement Measurements: Application to Agricultural Robots. Model. Identif. Control 2017, 38, 1–9. [Google Scholar] [CrossRef]
- Grimstad, L.; Pham, C.D.; Phan, H.T.; From, P.J. On the design of a low-cost, light-weight, and highly versatile agricultural robot. In Proceedings of the 2015 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO 2015), Lyon, France, 30 June–2 July 2015. [Google Scholar]
- Quigley, M.; Gerkey, B.; Conley, K.; Faust, J.; Foote, T.; Leibs, J.; Berger, E.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Workshop on Open Source Robotics, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Underwood, J.; Wendel, A.; Schofield, B.; McMurray, L.; Kimber, R. Efficient in-field plant phenomics for row-crops with an autonomous ground vehicle. J. Field Robot. 2017, 34, 1061–1083. [Google Scholar] [CrossRef]
- Burud, I.; Lange, G.; Lillemo, M.; Bleken, E.; Grimstad, L.; From, P.J. Exploring Robots and UAVs as Phenotyping Tools in Plant Breeding. In Proceedings of the IFAC 2017 World Congress, Toulouse, France, 9–14 July 2017. [Google Scholar]
- Grimstad, L.; Skattum, K.; Solberg, E.; Loureiro, G.D.S.M.; From, P.J. Thorvald II Configuration for Wheat Phenotyping. In Proceedings of the IROS Workshop on Agri-Food Robotics: Learning from Industry 4.0 and Moving into the Future, Vancouver, BC, Canada, 24–27 September 2017. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Width (m) | Length (m) | Drive Mods | Active Steering Mods | Suspension Mods | Frame |
|---|---|---|---|---|---|---|
| 1 | 1.50 | 1.35 | 4 | 4 | 4 | closed |
| 2 | 1.50 | 1.10 | 4 | 4 | 0 | closed |
| 3 | 1.50 | 1.10 | 4 | 4 | 0 | open |
| 4 | 1.50 | 1.10 | 2 | 0 | 0 | closed |
| 5 | 1.50 | 1.10 | 2 | 0 | 0 | open |
| 6 | N/A | 1.10 | 1 | 1 | 0 | N/A |
| Obstacle | Height (cm) | Width (cm) | Length [cm] |
|---|---|---|---|
| 1 | 14 | 79 | 120 |
| 2 | 13 | 79 | 117 |
| 3 | 12 | 60 | 80 |
| 4 | 10 | 101 | 10 |
| 5 | 18 | 70 | 20 |
| Config. | Pulling Force without Payload (N) | Pulling Force with Payload (N) |
|---|---|---|
| 2 | 1900 * | 2500 ** |
| 4 | 700–750 | 1100–1200 |
| 6 | 300 | not tested |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grimstad, L.; From, P.J. The Thorvald II Agricultural Robotic System. Robotics 2017, 6, 24. https://doi.org/10.3390/robotics6040024
Grimstad L, From PJ. The Thorvald II Agricultural Robotic System. Robotics. 2017; 6(4):24. https://doi.org/10.3390/robotics6040024
Chicago/Turabian StyleGrimstad, Lars, and Pål Johan From. 2017. "The Thorvald II Agricultural Robotic System" Robotics 6, no. 4: 24. https://doi.org/10.3390/robotics6040024
APA StyleGrimstad, L., & From, P. J. (2017). The Thorvald II Agricultural Robotic System. Robotics, 6(4), 24. https://doi.org/10.3390/robotics6040024