Advances in the Inspection of Unpiggable Pipelines

Abstract
:1. Introduction
1.1. Pipe Bends and Joints
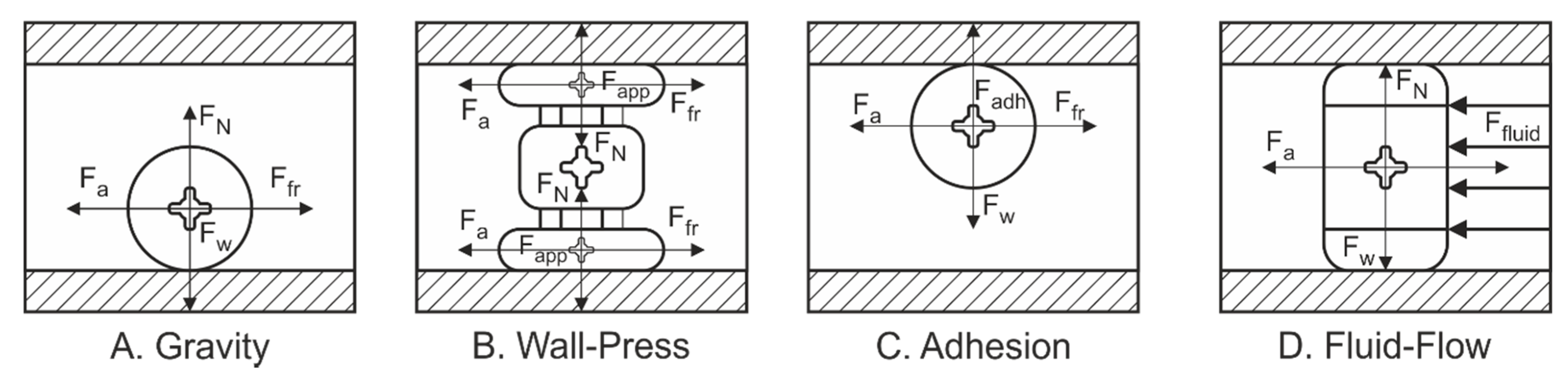
1.2. Robotic in-Pipe Locomotion
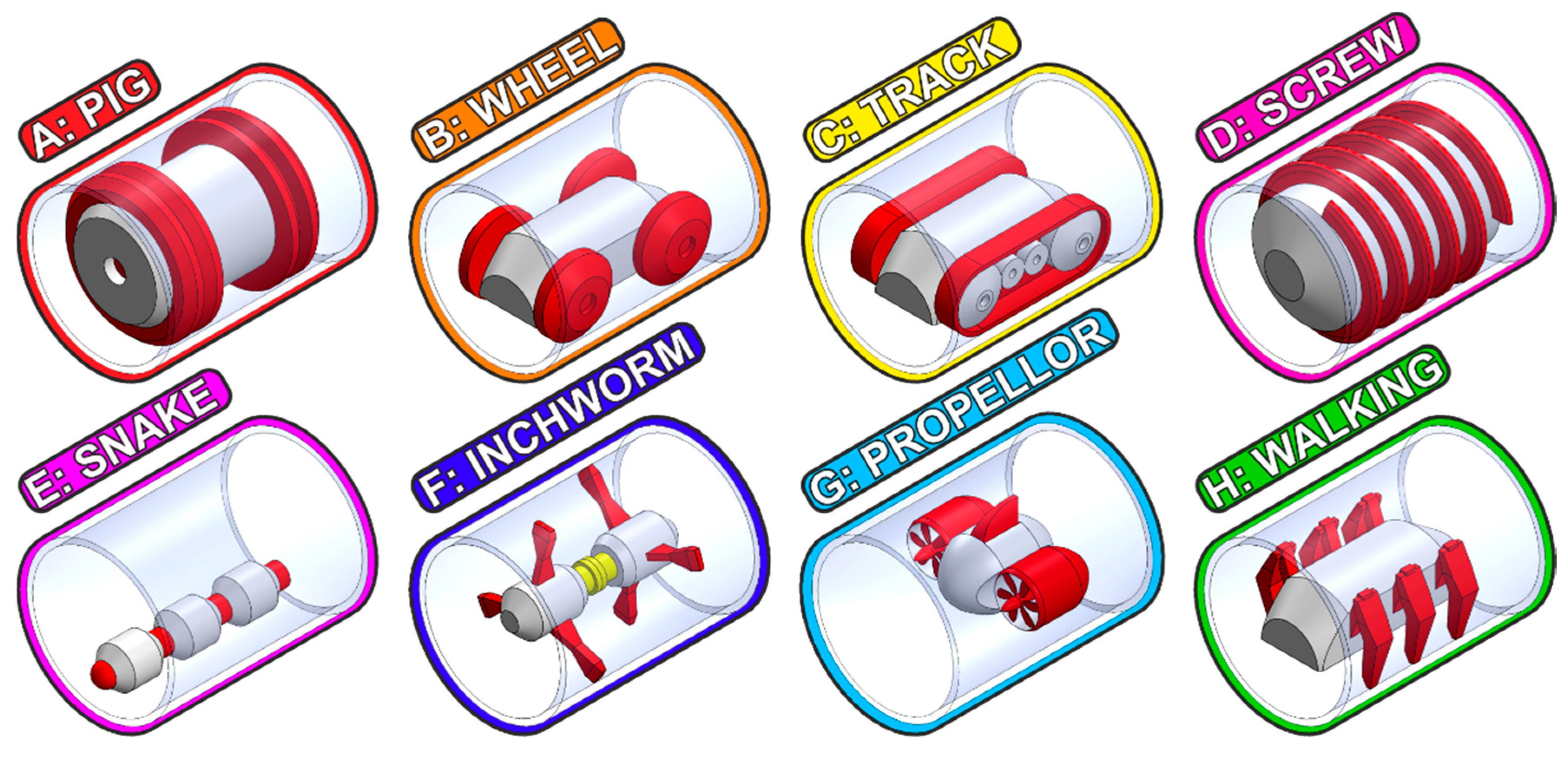
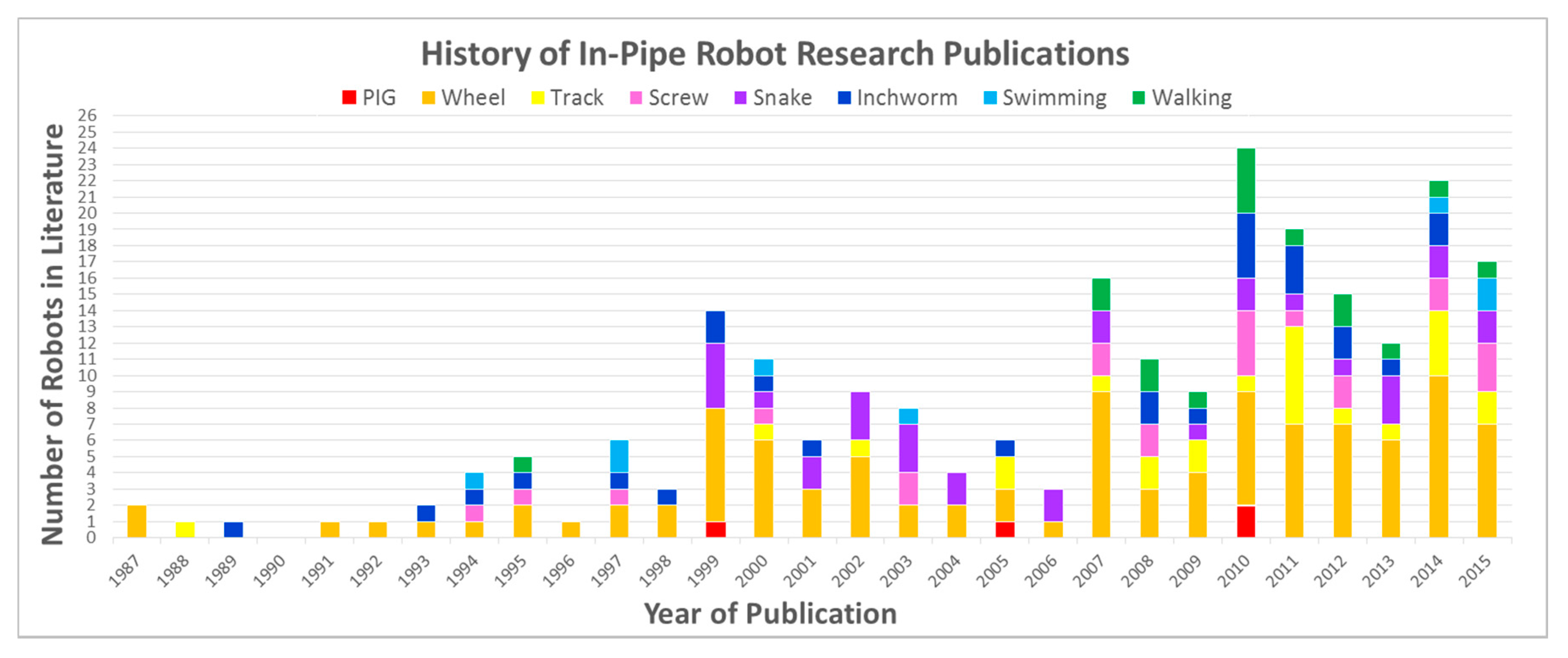
2. Review of in-Pipe Locomotion Systems
2.1. Pipeline Inspection Gauges
2.2. Wheeled Systems
2.3. Tracked Systems
2.4. Screw Systems
2.5. Snake Systems
2.6. Walking Systems
2.7. Inchworm Systems
2.8. Propeller
2.9. Summary
3. Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Central Intelligence Agency. Pipelines. Available online: https://www.cia.gov/library/publications/the-world-factbook/fields/2117.html (accessed on 18 June 2017).
- National Grid 2017. Project GRAID. Available online: http://projectgraid.com/ (accessed on 14 June 2017).
- Kwon, Y.-S.; Lee, B.; Whang, I.-C.; Kim, W.-K.; Yi, B.-J. A Flat Pipeline Inspection Robot with Two Wheel Chains. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 5141–5146. [Google Scholar]
- Schempf, H.; Mutschler, E.; Gavaert, A.; Skoptsov, G.; Crowley, W. Visual and Nondestructive Evaluation Inspection of Live Gas Mains Using the Explorer Family of Pipe Robots. J. Field Robot. 2010, 27, 217–249. [Google Scholar] [CrossRef]
- Hertzberg, J.; Kirchner, F. Landmark-based autonomous navigation in sewerage pipes. In Proceedings of the First Euromicro Workshop on Advanced Mobile Robot, Kaiserslautern, Germany, 9–11 October 1996; pp. 68–73. [Google Scholar]
- Hu, Z.; Appleton, E. Dynamic Characterisitics of a Novel Self-Drive Pipeline PIG. Trans. Robot. 2005, 21, 781–789. [Google Scholar]
- Okada, T.; Sanemori, T. MOGRER: A Vehicle Study and Realization for In-Pipe Inspection Tasks. J. Robot. Autom. 1987, 3, 573–582. [Google Scholar] [CrossRef]
- Okada, T.; Kanade, T. A Three-Wheeled Self-Adjusting Vehicle in a Pipe, FERRET-1. Int. J. Robot. Res. 1987, 6, 60–75. [Google Scholar] [CrossRef]
- Yang, S.U.; Kim, H.M.; Suh, J.S.; Choi, Y.S.; Mun, H.M.; Park, C.M.; Moon, H.; Choi, H.R. Novel Robot Mechanism Capable of 3D Differential Driving Inside Pipelines. In Proceedings of the IEEE International Conference on Intelligent Robots and Syst00ems, Chicago, IL, USA, 14–18 September 2014; pp. 1944–1949. [Google Scholar]
- Li, P.; Ma, S.; Li, B.; Wang, Y. Multifunctional Mobile Units with a Same Platform for In-Pipe Inspection Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 2643–2648. [Google Scholar]
- Lee, D.; Park, J.; Hyun, D.; Yook, G.; Yang, H.-S. Novel Mechanisms and Simple Locomotion Strategies for an In-Pipe Robot that can Inspect Various Pipe Types. Mech. Mach. Theory 2012, 56, 52–68. [Google Scholar] [CrossRef]
- Kawaguchi, Y.; Yoshida, I.; Kikuta, T.; Yamada, Y. Internal Pipe Inspection Robto. In Proceedings of the IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 857–862. [Google Scholar]
- Tache, F.; Fischer, W.; Caprari, G.; Siegwart, R. MagneBike: A Magnetic Wheeled Robot with High Mobility for Inspecting Complex-Shaped Structures. J. Field Robot. 2009, 26, 453–476. [Google Scholar] [CrossRef]
- Fischer, W.; Caprari, G.; Siegwart, R.; Moser, R. Very Compact Climbing Robot rolling on Magnetic Hexagonal Cam-Discs, with High Mobility on Obstacles but Minimal Mechanical Complexity. In Proceedings of the IEEE 6th German Conference on Robotics, Munich, Germany, 7–9 June 2010; pp. 1–7. [Google Scholar]
- Tavakoli, M.; Viegas, C.; Marques, L.; Pires, J.N.; de Almeida, A.T. OmniClimbers: Omni-directional Magnetic Wheeled Climbing Robots for Inspection of Ferromagnetic Structures. Robot. Auton. Syst. 2013, 61, 997–1007. [Google Scholar] [CrossRef]
- Nassiraei, A.A.F.; Kawamura, Y.; Ahrary, A.; Mikuriya, Y.; Ishii, K. Concept and Design of A Fully Autonomous Sewer Pipe Inspection Mobile Robot “KANTARO”. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 136–143. [Google Scholar]
- Kim, J.-H.; Sharma, G.; Iyengar, S.S. FAMPER: A Fully Autonomous Mobile Robot for Pipeline Exploration. In Proceedings of the IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 517–523. [Google Scholar]
- Moghaddam, M.M.; Arbabtafti, M.; Hadi, A. In-Pipe Inspection Crawler Adaptable to the Pipe Interior Diameter. Int. J. Robot. Autom. 2011, 26, 135–145. [Google Scholar] [CrossRef]
- Oya, T.; Okada, T. Development of a steerable, wheel-type, in-pipe robot and its path planning. Adv. Robot. 2005, 19, 635–650. [Google Scholar] [CrossRef]
- Kwon, Y.-S.; Yi, B.-J. Design and Motion Planning of a Two-Module Collaborative Indoor Pipeline Inspection Robot. Trans. Robot. 2012, 28, 681–696. [Google Scholar] [CrossRef]
- Ciszewski, M.; Waclawski, M.; Buratowski, T.; Giergiel, M.; Kurc, K. Design, Modelling and Laboratory Testing of a Pipe Inspection Robot. Arch. Mech. Eng. 2015, 62, 395–408. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S. Speed Analysis for three Modules of an In-Pipe Inspection Robots for Passing through Bent Pipes. In Proceedings of the IEEE International Conference on Robotics and Biometrics, Bali, Indonesia, 5–10 December 2014; pp. 1731–1736. [Google Scholar]
- Park, J.; Hyun, D.; Cho, W.-H.; Kim, T.-H.; Yang, H.-S. Normal-Force Control for an In-Pipe Robot According to the Inclination of Pipelines. Trans. Ind. Electron. 2011, 58, 5304–5310. [Google Scholar] [CrossRef]
- Min, J.; Setiawan, Y.D.; Pratama, P.S.; Kim, S.B.; Kim, H.K. Development and Controller Design of Wheeled-Type Pipe Inspection Robot. In Proceedings of the IEEE International Conference on Advances in Computing, Communications and Informatics, New Delhi, India, 24–27 September 2014; pp. 789–795. [Google Scholar]
- Horodonica, M.; Preumont, A.; Burda, I.; Mignon, E. The Heli-Pipe Inspection Robots Architecture for Curved Pipes. In Proceedings of the IEEE International Conference of Manufacturing Systems, Crystal City Hyatt Regency Washington, DC, USA, 5–8 October 2003. [Google Scholar]
- Nishihara, T.; Osuka, K.; Tamura, I. Development of a Simulation Model for Inner-Gas-Pipe Inspection Robot: SPRING. In Proceedings of the Society of Instrument and Control Engineers of Japan, Taipei, Taiwan, 18–21 August 2010. [Google Scholar]
- Ye, C.; Liu, L.; Xu, X.; Chen, J. Development of an In-Pipe Robot with Two Steerable Driving Wheels. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015. [Google Scholar]
- Debenest, P.; Guarnieri, M.; Hirose, S. PipeTron Series—Robots for Pipe Inspection. In Proceedings of the IEEE 3rd International Conference on Applied Robotics for the Power Industry, Foz do Iguassu, Brazil, 14–16 October 2014; pp. 1–6. [Google Scholar]
- Sato, K.; Ohki, T.; Lim, H.-O. Development of In-Pipe Robot Capable of Coping with Various Diameters. In Proceedings of the IEEE 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 1076–1081. [Google Scholar]
- Prada, E.; Valasek, M.; Virgala, I.; Gmiterko, A.; Kelemen, M.; Hagara, M.; Liptak, T. New Approach of Fixation Possibilities Investigation for Snake Robot in the Pipe. In Proceedings of the IEEE International Conference on Mechanicals and Automation, Beijing, China, 2–5 August 2015. [Google Scholar]
- Dertien, E.; Stramigioli, S.; Pulles, K. Development of an Inspection Robot for Small Diameter Gas Distribution Mains. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3447–3448. [Google Scholar]
- Zagler, A.; Pfeiffer, F. “MORITZ” a Pipe Crawler for Tube Junctions. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 2954–2959. [Google Scholar]
- Jeon, W.; Park, J.; Kim, I.; Kang, Y.-K.; Yang, H. Development of High Mobility In-Pipe Inspection Robot. In Proceedings of the IEEE International Symposium on System Integration, Kyoto, Japan, 20–22 December 2011; pp. 479–484. [Google Scholar]
- Lu, Y.; Yu, J.; Sui, C.; Han, J. Design of In-Pipe 3SPR/3RPS Parallel Manipulator and its Kinestatics Analysis. In Proceedings of the IEEE 5th Annual International Conference on Cyber Technology in Automation, Control and Intelligent Systems, Shenyang, China, 8–12 June 2015. [Google Scholar]
- Boxerbaum, A.S.; Shaw, K.M.; Chiel, H.J.; Quinn, R.D. Continous Wave Peristaltic Motion in a Robot. Int. J. Robot. Res. 2012, 31, 302–318. [Google Scholar] [CrossRef]
- Wu, Y.; Chatzigeorgiou, D.; Youcef-Toumi, K.; Zribi, M. Modeling and Parameter Estimation for In-pipe Swimming Robots. In Proceedings of the IEEE American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 2007–2013. [Google Scholar]
- Doyle, M.J.; Xu, X.; Gu, Y.; Perez-Diaz, F.; Parrott, C.; Grob, R. Modular Hydraulic Propulsion: A Robot that Moves by Routing Fluid Through Itself. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 5189–5196. [Google Scholar]
- Synthotech Limited. Available online: http://www.synthotech.com/ (accessed on 13 September 2017).
- Premtech Limited. Available online: http://www.premtechltd.com/ (accessed on 13 September 2017).
- PIE—Pipeline Integrity Engineers. Available online: http://www.pieuk.co.uk/ (accessed on 13 September 2017).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| REF No. | Information | Element | Adaptability | In-Pipe Geometry | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Robot Name | Type 1 | Type 2 | Min | Max | Range | X | Y | L | T | V | |
| [13] | MagneBike | Magnetic | Wheel | 250 | ∞ | U | ✓ | ✓ | ✓ | ✓ | - |
| [37] | Fluid Modules | Modular | Swimming | 125 | ∞ | U | ✓ | ✓ | ✓ | ✓ | ✓ |
| [36] | MIT-MRL | Swimming | Swimming | 100 | ∞ | U | ✓ | ✓ | ✓ | ✓ | ✓ |
| [12] | Osaka Robot | Magnetic | Wheel | 150 | 600 | 450 | ✓ | ✓ | ✓ | ✓ | - |
| [23] | PAROYS-II | Caterpillar | Wall-Press | 400 | 700 | 300 | ✓ | ✓ | ✓ | ✓ | ✕ |
| [7] | MOGRER | Wheel | Wall-Press | 520 | 800 | 280 | ✓ | ✓ | ✓ | ✕ | ✕ |
| [2] | Pukyong Robot | Wheel | Wall-Press | 300 | 500 | 200 | ✓ | ✓ | ✓ | - | ✕ |
| [29] | Kangawa Robot | Caterpillar | Snake | 100 | 300 | 200 | ✓ | ✓ | ✓ | ✓ | - |
| [25] | HELI-PIPE Series | Screw | Wheel | 40 | 173 | 133 | ✓ | ✓ | ✓ | ✕ | ✕ |
| [18] | Tarbiat Robot | Caterpillar | Wall-Press | 250 | 350 | 100 | ✓ | ✓ | ✓ | - | ✕ |
| [34] | YonSei Robot | Inchworm | Inchworm | 205 | 305 | 100 | ✓ | ✓ | ✓ | - | ✕ |
| [32] | MORITZ | Walking | Wall-Press | 600 | 700 | 100 | ✓ | ✓ | - | - | ✕ |
| [16] | KANTARO | Wheel | Wall-Press | 200 | 300 | 100 | ✓ | ✕ | ✓ | ✓ | ✕ |
| [31] | PIRATE | Wheel | Wall-Press | 41 | 125 | 84 | ✓ | ✓ | ✓ | - | ✕ |
| [28] | PIPETRON I–VII | Snake | Wheel | 75 | 150 | 75 | ✓ | ✓ | ✓ | ✓ | ✕ |
| [26] | SPRING | Screw | Wall-Press | 75 | 150 | 75 | ✓ | ✓ | ✓ | - | ✕ |
| [4] | EXPLORER II | Snake | Wall-Press | 150 | 200 | 50 | ✓ | ✓ | ✓ | ✓ | ✓ |
| [9] | MRINSPECT VI+ | Wheel | Wall-Press | 130 | 180 | 50 | ✓ | ✓ | ✓ | ✓ | ✕ |
| [27] | Shenyang Robot | Wheel | Wall-Press | 250 | 300 | 50 | ✓ | ✓ | ✓ | - | ✕ |
| [11] | AQAM | Wheel | Wall-Press | 259 | 305 | 46 | ✓ | ✓ | ✓ | ✓ | ✕ |
| [35] | CMMWorm | Inchworm | Inchworm | 180 | 220 | 40 | ✓ | - | ✓ | - | ✕ |
| [17] | FAMPER | Caterpillar | Wall-Press | 127 | 157 | 30 | ✓ | ✓ | ✓ | ✓ | ✕ |
| [8] | FERRET-1 | Wheel | Wall-Press | 90 | 120 | 30 | ✓ | ✓ | ✓ | ✕ | ✕ |
| [3] | Two-Plane Robot | Wheel | Wall-Press | 80 | 100 | 20 | ✓ | ✕ | ✓ | ✓ | ✕ |
| [21] | AGH Robot | Caterpillar | Wall-Press | 210 | 210 | 0 | ✓ | ✕ | ✓ | ✕ | ✕ |
| [30] | LOCOSNAKE | Snake | Snake | 120 | 120 | 0 | ✓ | ✓ | ✓ | ✓ | - |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mills, G.H.; Jackson, A.E.; Richardson, R.C. Advances in the Inspection of Unpiggable Pipelines. Robotics 2017, 6, 36. https://doi.org/10.3390/robotics6040036
Mills GH, Jackson AE, Richardson RC. Advances in the Inspection of Unpiggable Pipelines. Robotics. 2017; 6(4):36. https://doi.org/10.3390/robotics6040036
Chicago/Turabian StyleMills, George H., Andrew E. Jackson, and Robert C. Richardson. 2017. "Advances in the Inspection of Unpiggable Pipelines" Robotics 6, no. 4: 36. https://doi.org/10.3390/robotics6040036
APA StyleMills, G. H., Jackson, A. E., & Richardson, R. C. (2017). Advances in the Inspection of Unpiggable Pipelines. Robotics, 6(4), 36. https://doi.org/10.3390/robotics6040036