An Underwater Image Enhancement Algorithm for Environment Recognition and Robot Navigation

Abstract
:1. Introduction
2. Related Works
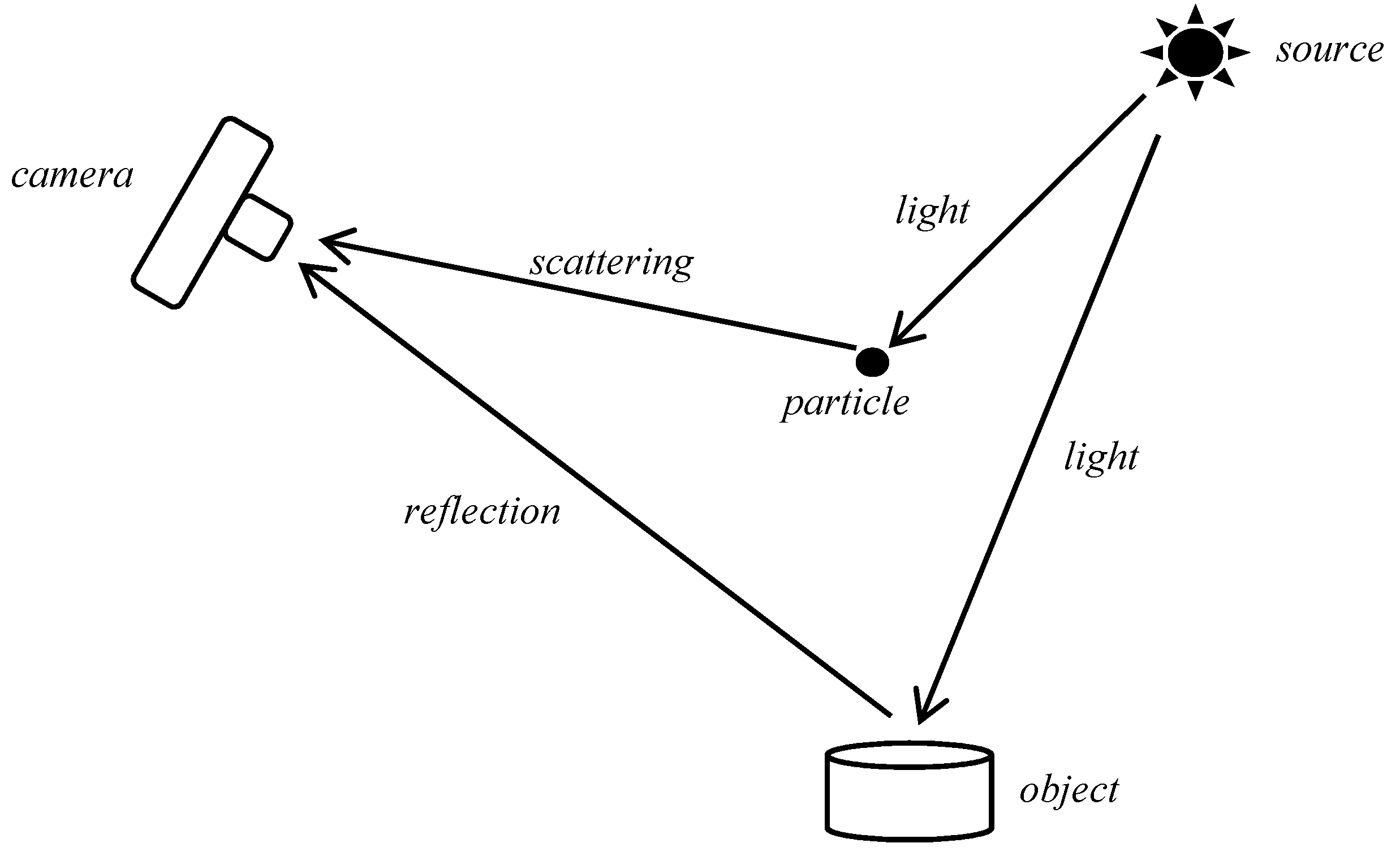
2.1. Classical Models
2.2. Dark Channel Prior Model
2.3. Underwater Dark Channel Prior Models
3. The Proposed Approach
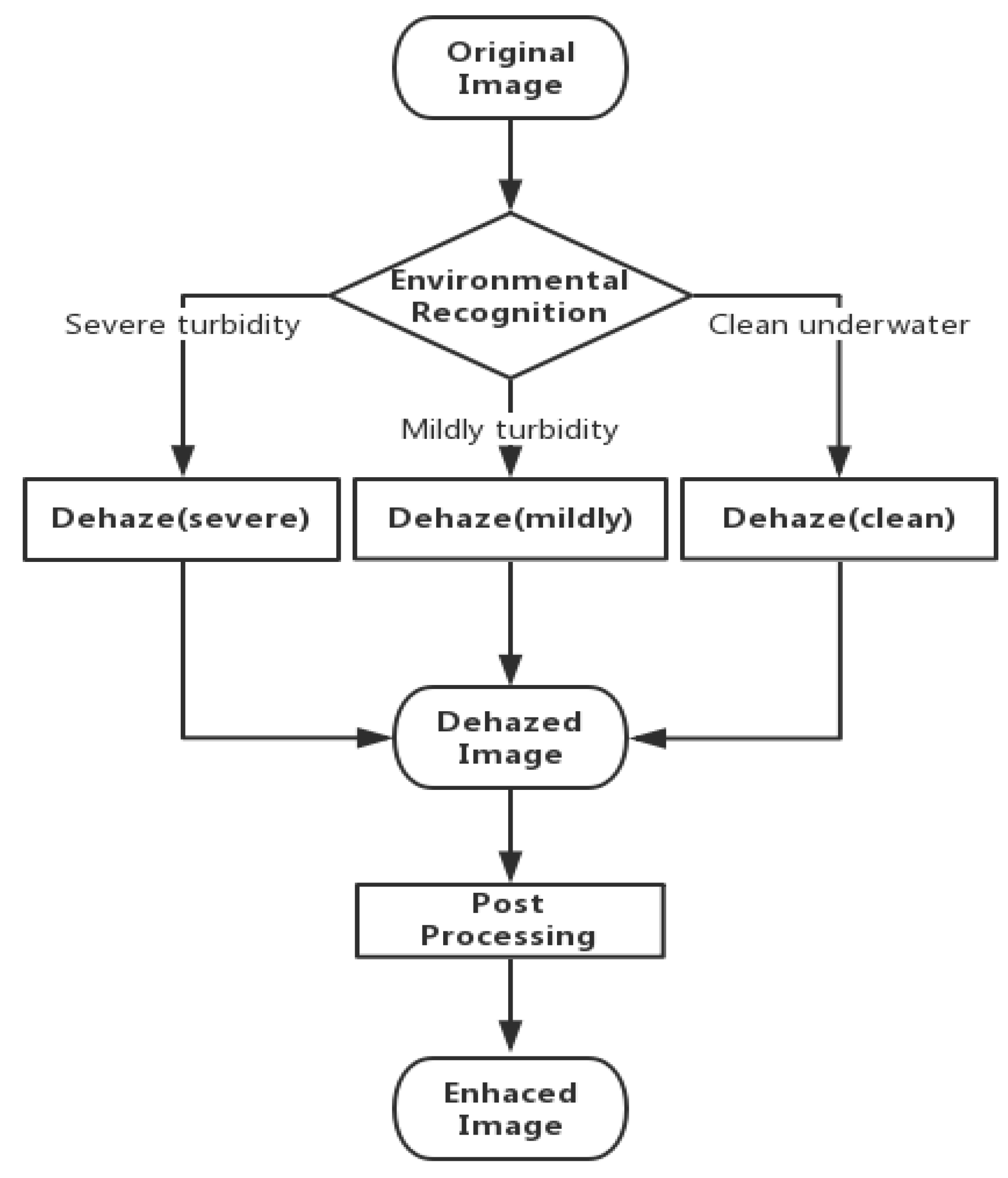
3.1. Architecture
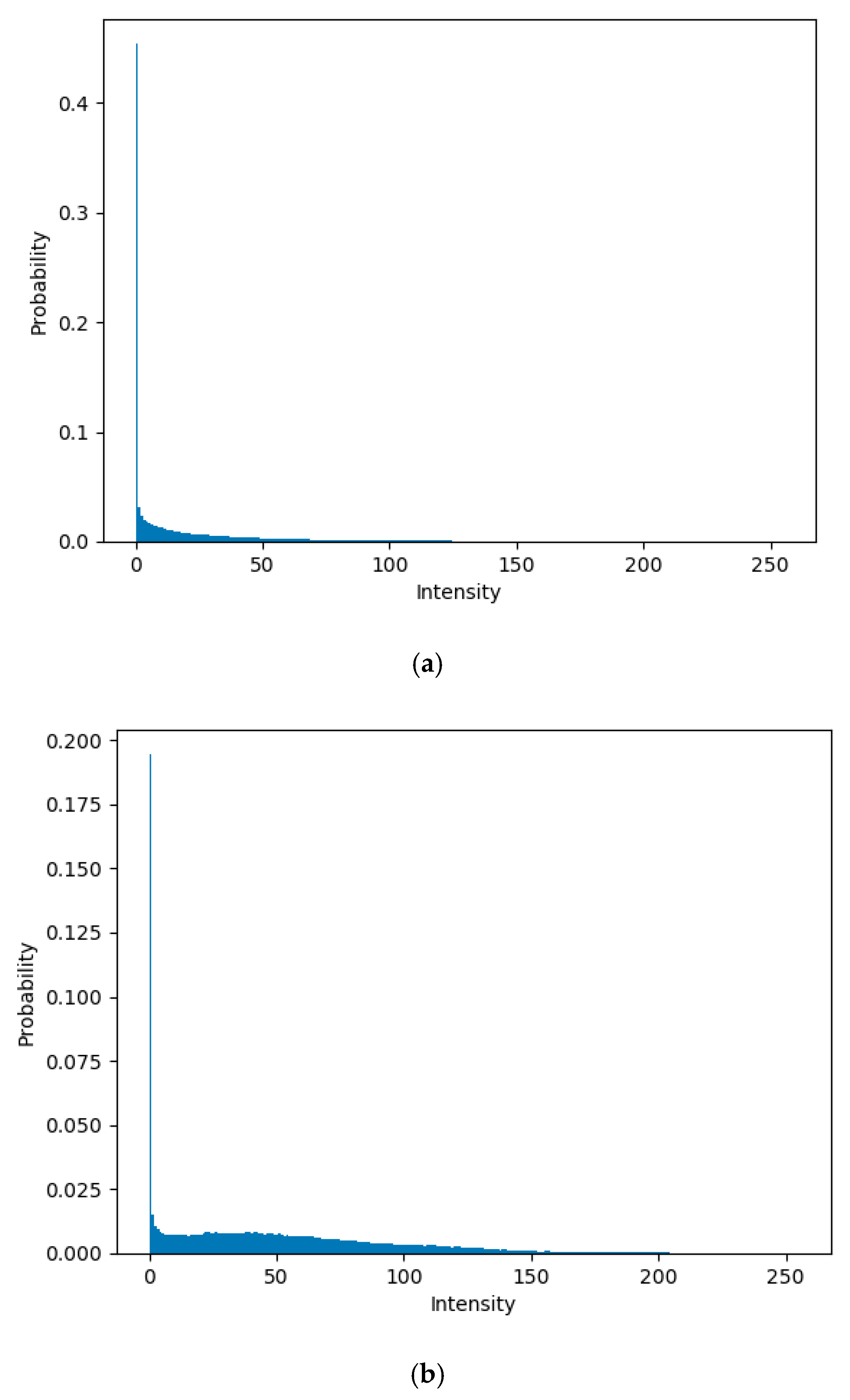
3.2. Verify the Underwater Dark Channel Prior
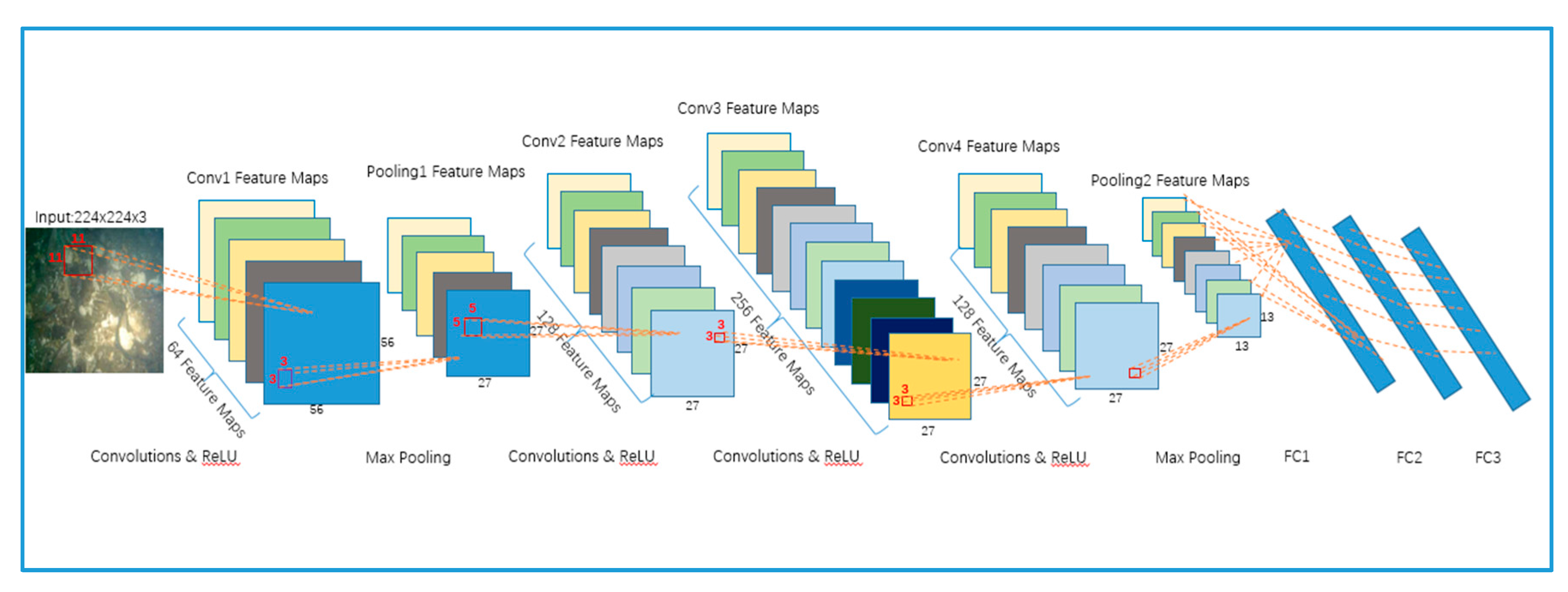
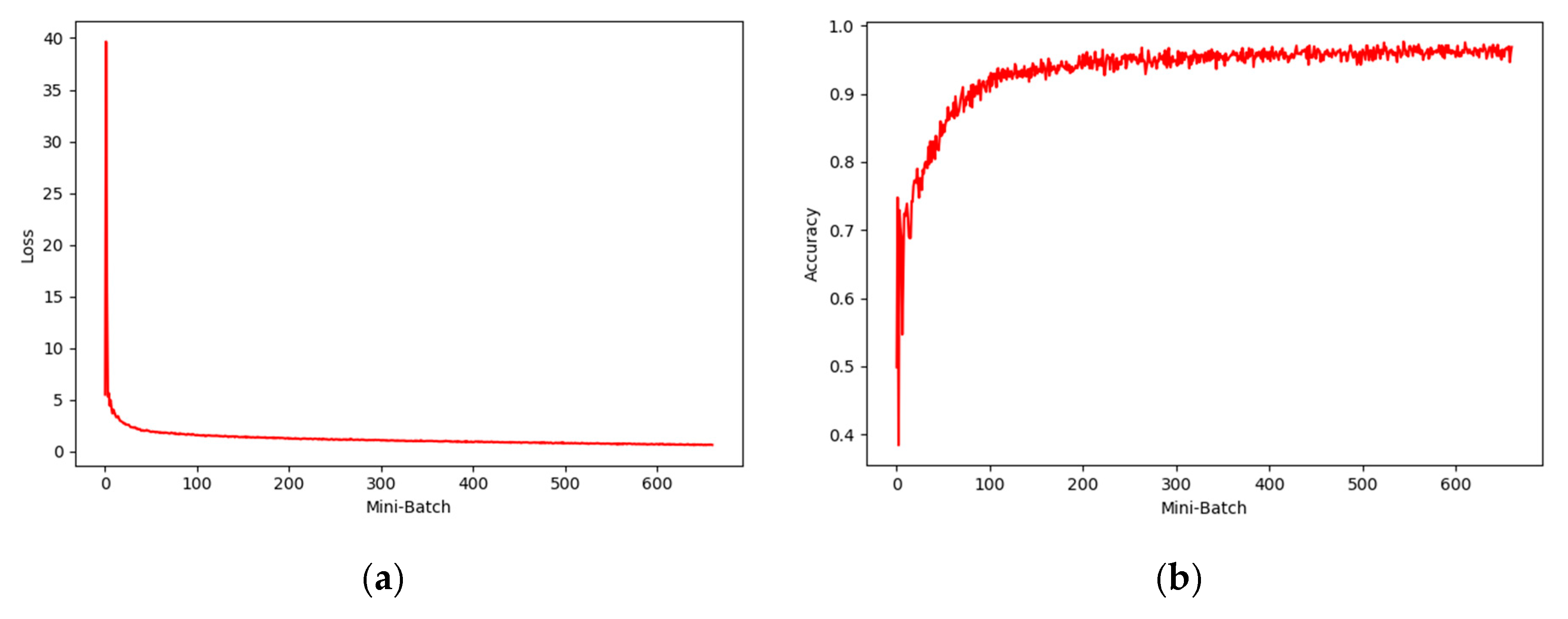
3.3. Underwater Environment Recognition
3.4. Underwater Image Denoising Algorithm
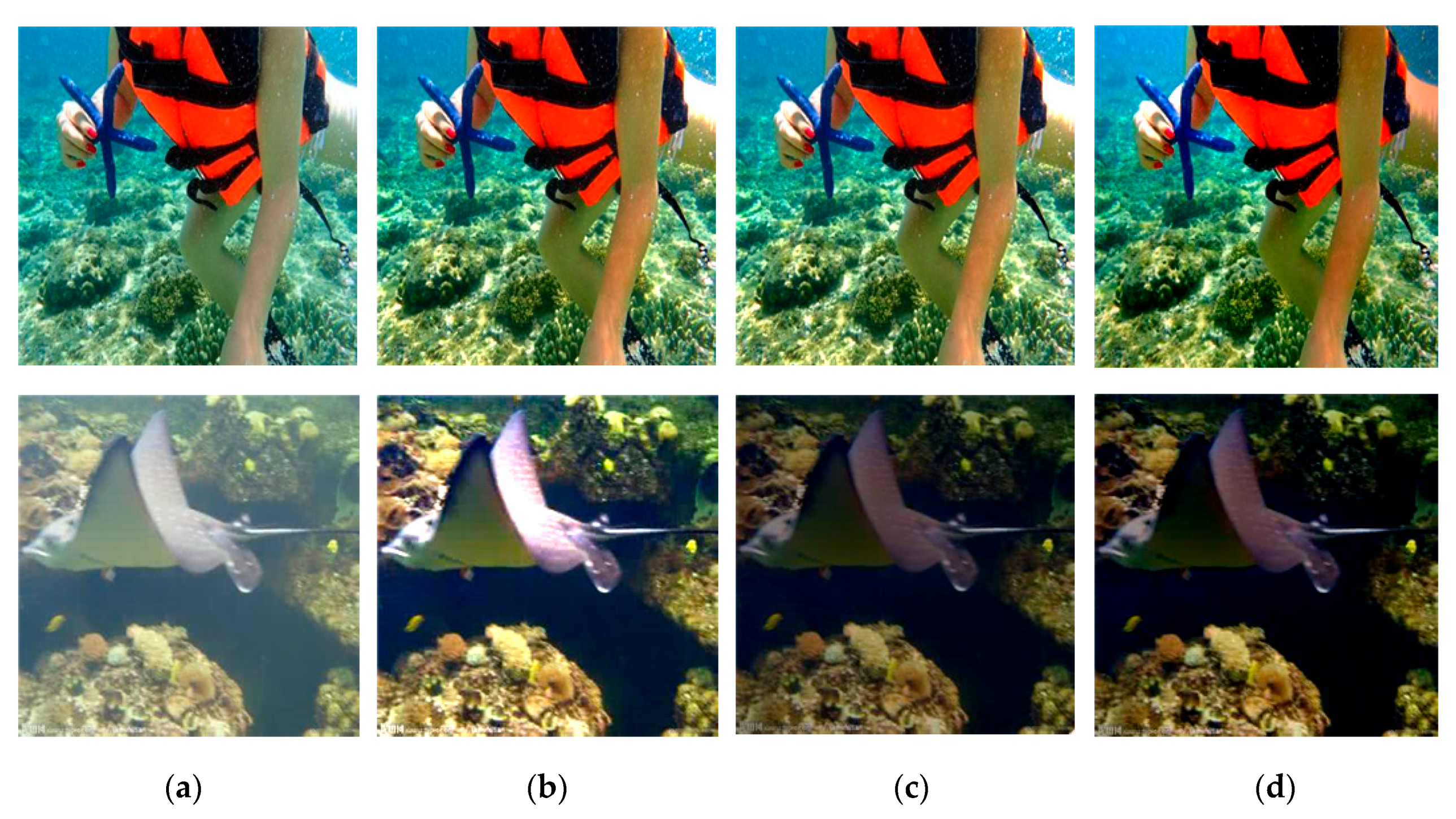
3.5. Post-Processing
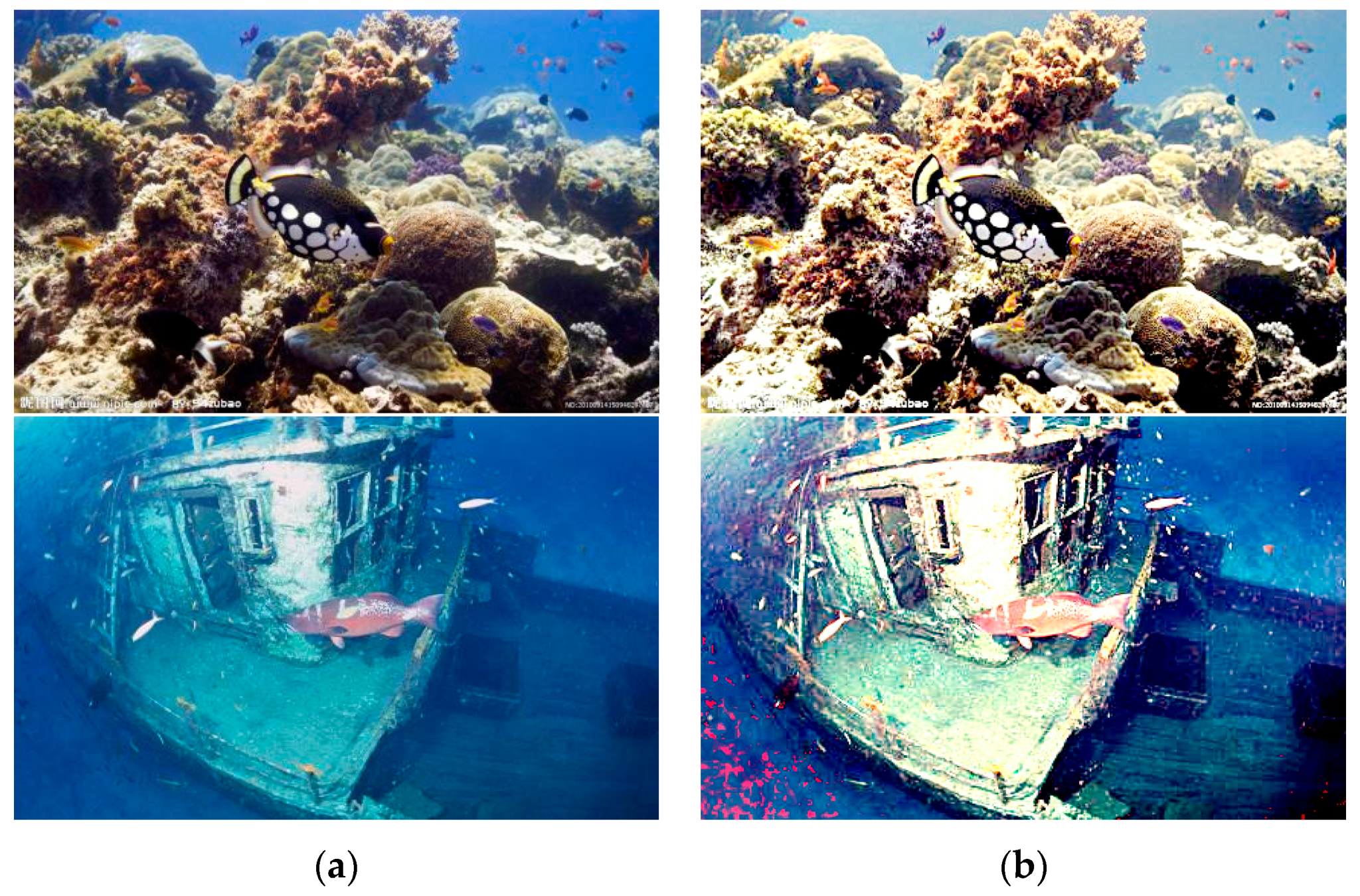
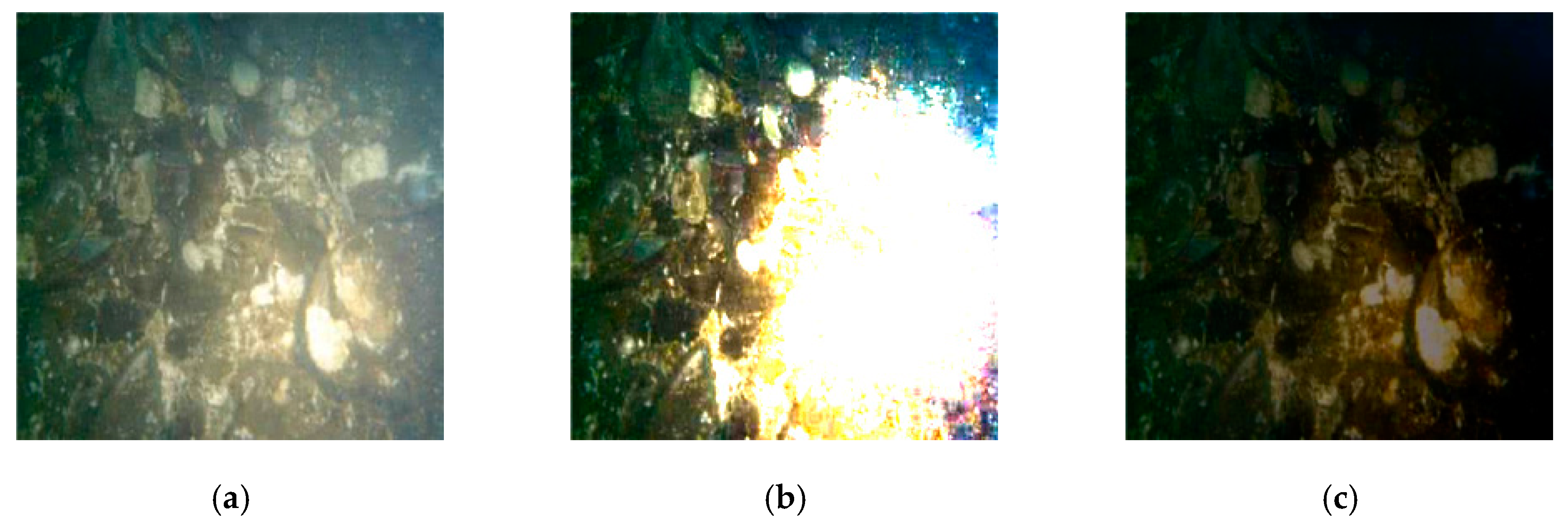
4. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jaffe, J.S. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- McLean, J.W.; Voss, K.J. Point spread function in ocean water: Comparison between theory and experiment. Appl. Opt. 1991, 30, 2027–2030. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J. Simple empirical model of the oceanic point spread function. Appl. Opt. 1991, 30, 2647–2651. [Google Scholar] [CrossRef] [PubMed]
- Hou, W.; Gray, D.J.; Weidemann, A.D.; Arnone, R.A. Comparison and validation of point spread models for imaging in natural waters. Opt. Express 2008, 16, 9958–9965. [Google Scholar] [CrossRef] [PubMed]
- Binding, C.E.; Bowers, D.G.; Mitchelson-Jacob, E.G. Estimating suspended sediment concentrations from ocean colour measurements in moderately turbid waters; the impact of variable particle scattering properties. Remote Sens. Environ. 2005, 94, 373–383. [Google Scholar] [CrossRef]
- Lee, M.E.; Korchemkina, E.N. Volume Scattering Function of Seawater; Springer Series in Light Scattering; Springer: Cham, Switzerland, 2018; pp. 151–195. [Google Scholar]
- Kirk, J.T. Volume scattering function, average cosines, and the underwater light field. Limnol. Oceanogr. 1991, 36, 455–467. [Google Scholar] [CrossRef]
- Singh, S.S.; Jarial, P. Review and Comparative Analysis on Image Enhancement for Underwater Images. Int. J. Adv. Res. Comput. Sci. 2017, 8. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Zhang, Y.; Chen, M.; Serikawa, S.; Kim, H. Underwater optical image processing: A comprehensive review. Mob. Netw. Appl. 2017, 22, 1204–1211. [Google Scholar] [CrossRef]
- Ancuti, C.; Ancuti, C.O.; Haber, T.; Bekaert, P. Enhancing Underwater Images and Videos by Fusion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 81–88. [Google Scholar]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Bekaert, P. Color balance and fusion for underwater image enhancement. IEEE Trans. Image Process. 2018, 27, 379–393. [Google Scholar] [CrossRef] [PubMed]
- Raj, S.M.A.; Khadeeja, N.; Supriya, M.H. Implementation of Histogram Based Image Fusion Technique for Underwater Image Enhancement in Reconfigurable Platform. Indian J. Sci. Technol. 2017, 10. [Google Scholar] [CrossRef]
- Iqbal, K.; Salam, R.A.; Osman, A.; Talib, A.Z. Underwater Image Enhancement Using an Integrated Colour Model. IAENG Int. J. Comput. Sci. 2007, 34, 239–244. [Google Scholar]
- Althaf, S.K.; SK, J.B.; Shaik, M.A. A Study on Histogram Equalization Techniques for Underwater Image Enhancement. Int. J. Sci. Res. Comput. Sci. Eng. Inf. Technol. 2017, 2. [Google Scholar]
- Badgujar, P.N.; Singh, J.K. Underwater image enhancement using generalized histogram equalization, discrete wavelet transform and KL-transform. Int. J. Innov. Res. Sci. Eng. Technol. 2017, 6, 11834–11840. [Google Scholar]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. Properties and performance of a center/surround retinex. IEEE Trans. Image Process. 1997, 6, 451–462. [Google Scholar] [CrossRef] [PubMed]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. A multiscale retinex for bridging the gap between color images and the human observation of scenes. IEEE Trans. Image Process. 1997, 6, 965–976. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Wang, T.; Dong, J.; Yu, H. Underwater image enhancement via extended multi-scale Retinex. Neurocomputing 2017, 245, 1–9. [Google Scholar] [CrossRef]
- Tan, R.T. Visibility in bad weather from a single image. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Fattal, R. Single Image Dehazing. In Proceedings of the Annual Conference on Computer Graphics SIGGRAPH, Los Angeles, CA, USA, 11–15 August 2008. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Chromatic Framework for Vision in Bad Weather. In Proceedings of the 2000 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hilton Head Island, SC, USA, 13–15 June 2000; pp. 598–605. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Vision and the Atmosphere. Int. J. Comput. Vis. 2002, 48, 233–254. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [PubMed]
- Yang, H.Y.; Chen, P.Y.; Huang, C.C.; Zhuang, Y.Z.; Shiau, Y.H. Low Complexity Underwater Image Enhancement Based on Dark Channel Prior. In Proceedings of the 2011 Second International Conference on Innovations in Bio-inspired Computing and Applications Innovations in Bio-inspired Computing and Applications (IBICA), Ostrava, Czech Republic, 17–20 December 2011. [Google Scholar]
- Peng, Y.T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef] [PubMed]
- Akila, C.; Varatharajan, R. Color fidelity and visibility enhancement of underwater image de-hazing by enhanced fuzzy intensification operator. Multimedia Tools Appl. 2018, 77, 4309–4322. [Google Scholar] [CrossRef]
- Block, M.; Gehmlich, B.; Hettmanczyk, D. Automatic Underwater Image Enhancement using Improved Dark Channel Prior. Stud. Digit. Herit. 2017, 1, 566–589. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, B.; Tian, W. New Approach for Underwater Image Denoise Combining Inhomogeneous Illumination and Dark Channel Prior; MTS: Moscow, Russia, 2013. [Google Scholar]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 60, 1097–1105. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision And Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Fattal, R. Single image dehazing. ACM Trans. Gr. (TOG) 2008, 27, 72. [Google Scholar] [CrossRef]
- Yang, M.; Sowmy, A.A. New Image Quality Evaluation Metric for Underwater Video. IEEE Signal Process. Lett. 2014, 21, 1215–1219. [Google Scholar] [CrossRef]
- Li, F.; Wu, J.; Wang, Y.; Zhao, Y.; Zhang, X. A Color Cast Detection Algorithm of Robust Performance. In Proceedings of the IEEE International Conference on Advanced Computational Intelligence, Nanjing, China, 18–20 October 2012; pp. 662–664. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 2672–2680. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contrast | Entropy | Average Gradient | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Clean | MT | ST | Clean | MT | ST | Clean | MT | ST | |
| Original | 2.50 | 7.25 | 6.0 | 1.0 | 3.0 | 1.5 | 4.5 | 5.25 | 5.5 |
| DCP | 19.25 | 43.0 | 47.0 | 0.75 | 0.0 | 0.0 | 42.5 | 40.5 | 42.5 |
| BSDCP | 12.0 | 11.0 | 13.25 | 2.0 | 0.0 | 0.0 | 1.0 | 27.5 | 29.0 |
| Result | 66.25 | 38.75 | 33.75 | 96.25 | 97.0 | 98.5 | 52.0 | 26.75 | 23.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, K.; Pan, W.; Xu, S. An Underwater Image Enhancement Algorithm for Environment Recognition and Robot Navigation. Robotics 2018, 7, 14. https://doi.org/10.3390/robotics7010014
Xie K, Pan W, Xu S. An Underwater Image Enhancement Algorithm for Environment Recognition and Robot Navigation. Robotics. 2018; 7(1):14. https://doi.org/10.3390/robotics7010014
Chicago/Turabian StyleXie, Kun, Wei Pan, and Suxia Xu. 2018. "An Underwater Image Enhancement Algorithm for Environment Recognition and Robot Navigation" Robotics 7, no. 1: 14. https://doi.org/10.3390/robotics7010014
APA StyleXie, K., Pan, W., & Xu, S. (2018). An Underwater Image Enhancement Algorithm for Environment Recognition and Robot Navigation. Robotics, 7(1), 14. https://doi.org/10.3390/robotics7010014