Design and Experiments of a Novel Humanoid Robot with Parallel Architectures †




Abstract
:1. Introduction
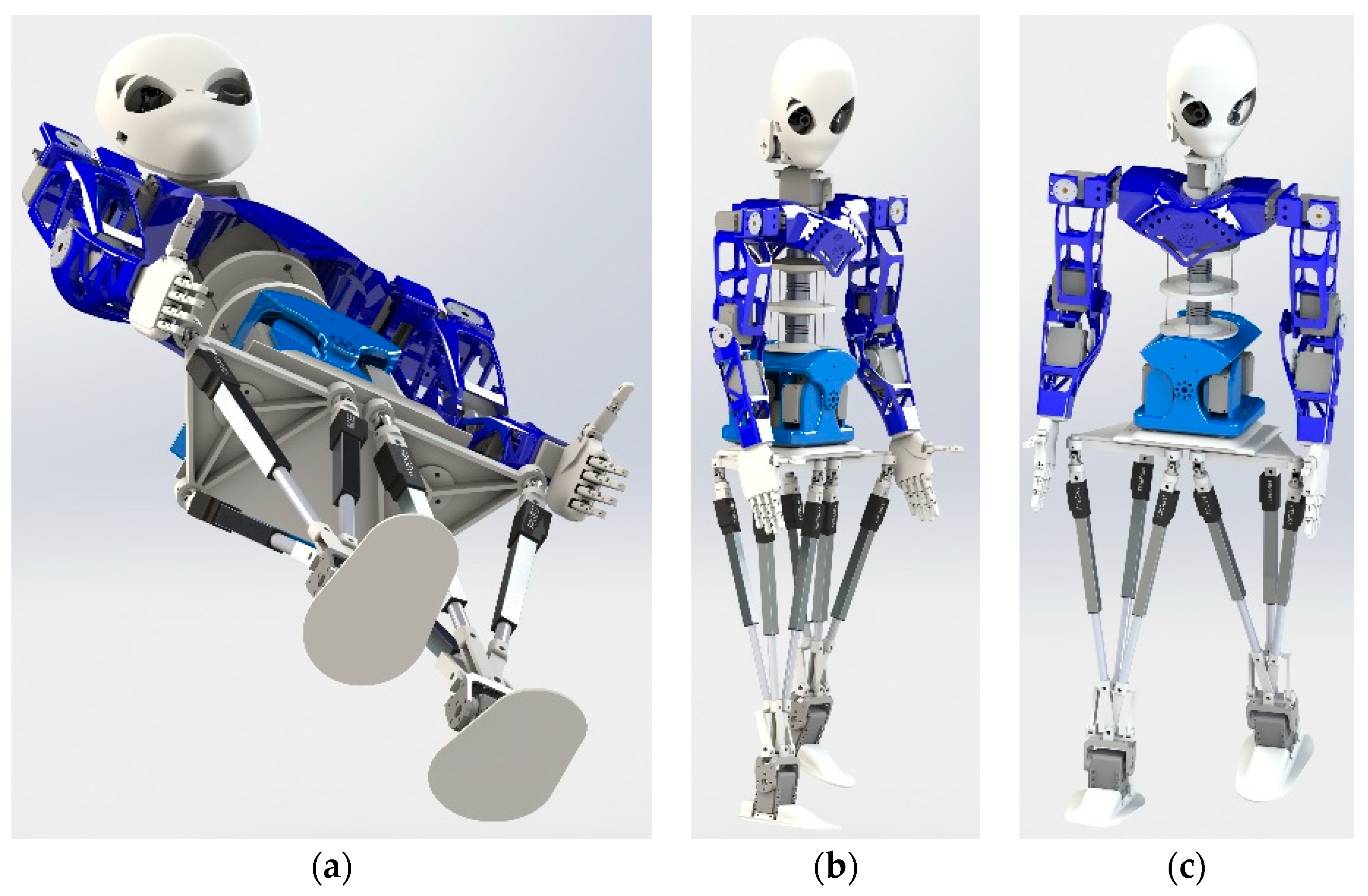
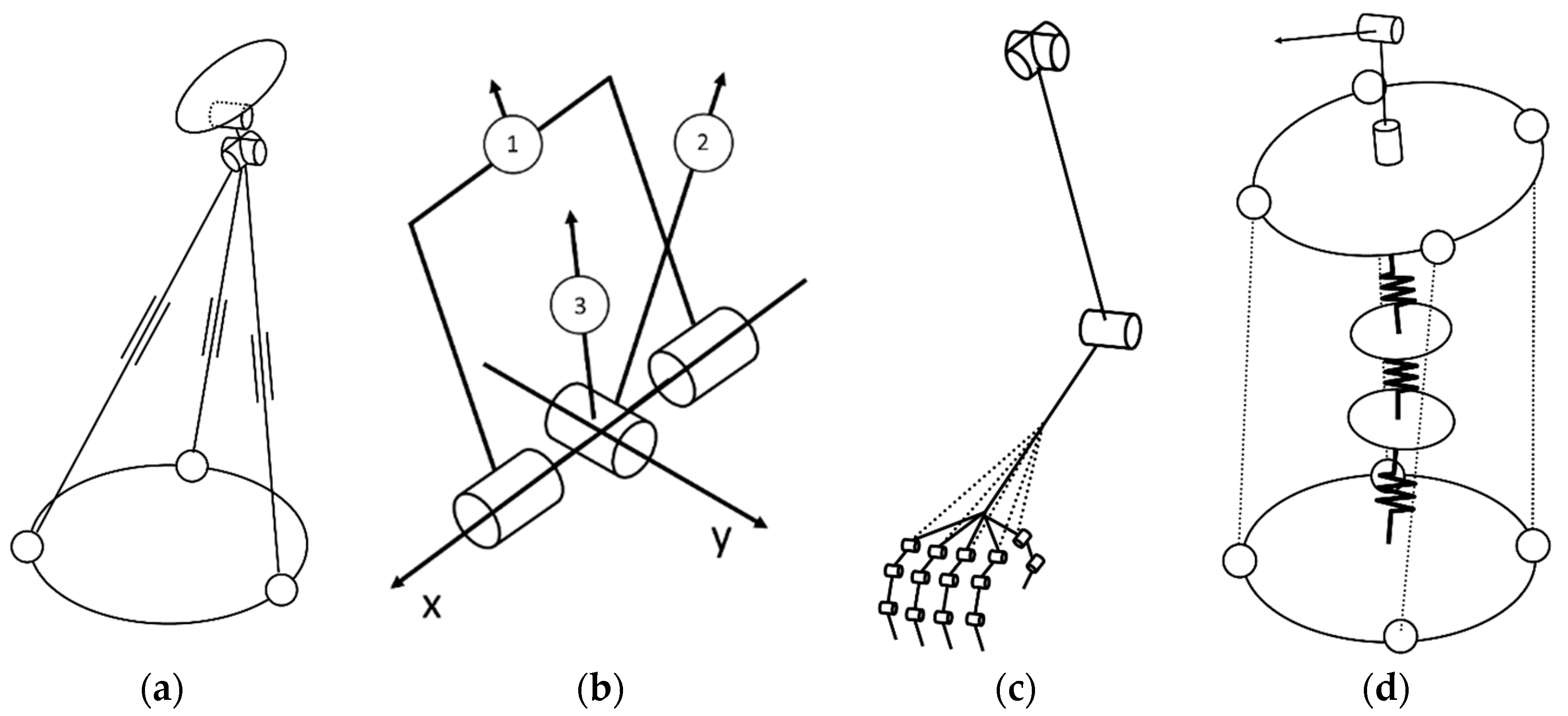
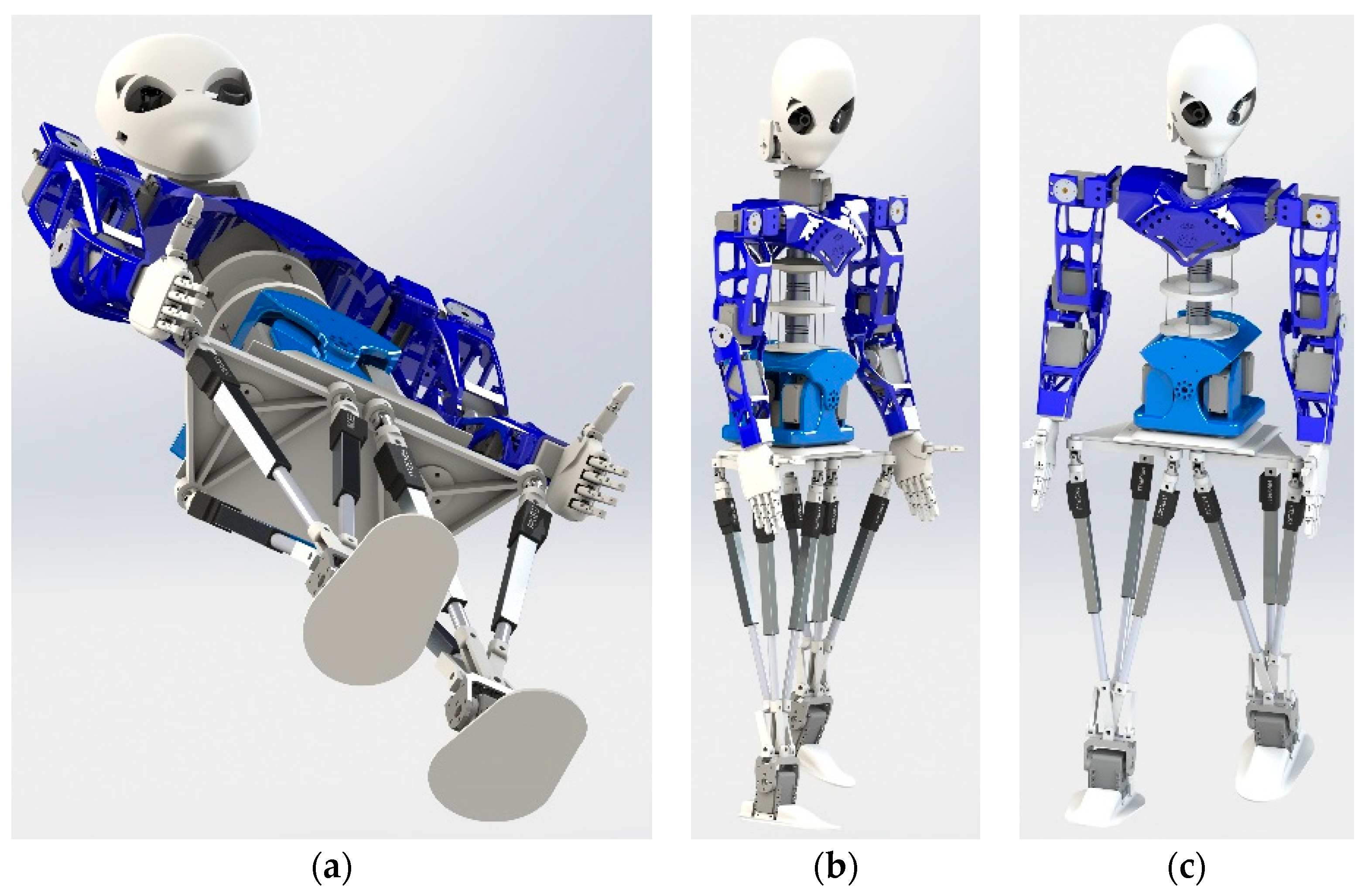
2. Design of LARMbot 2
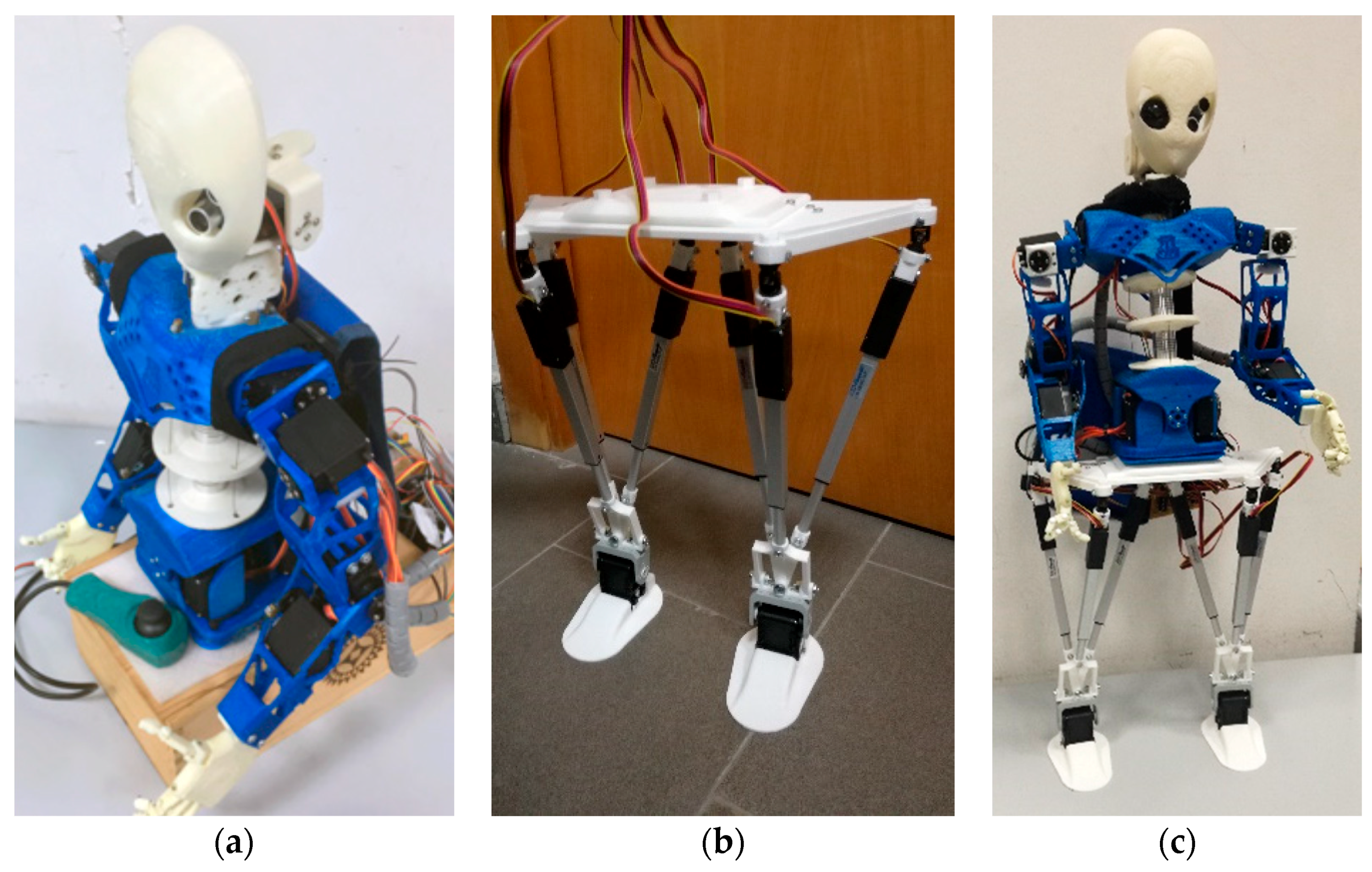
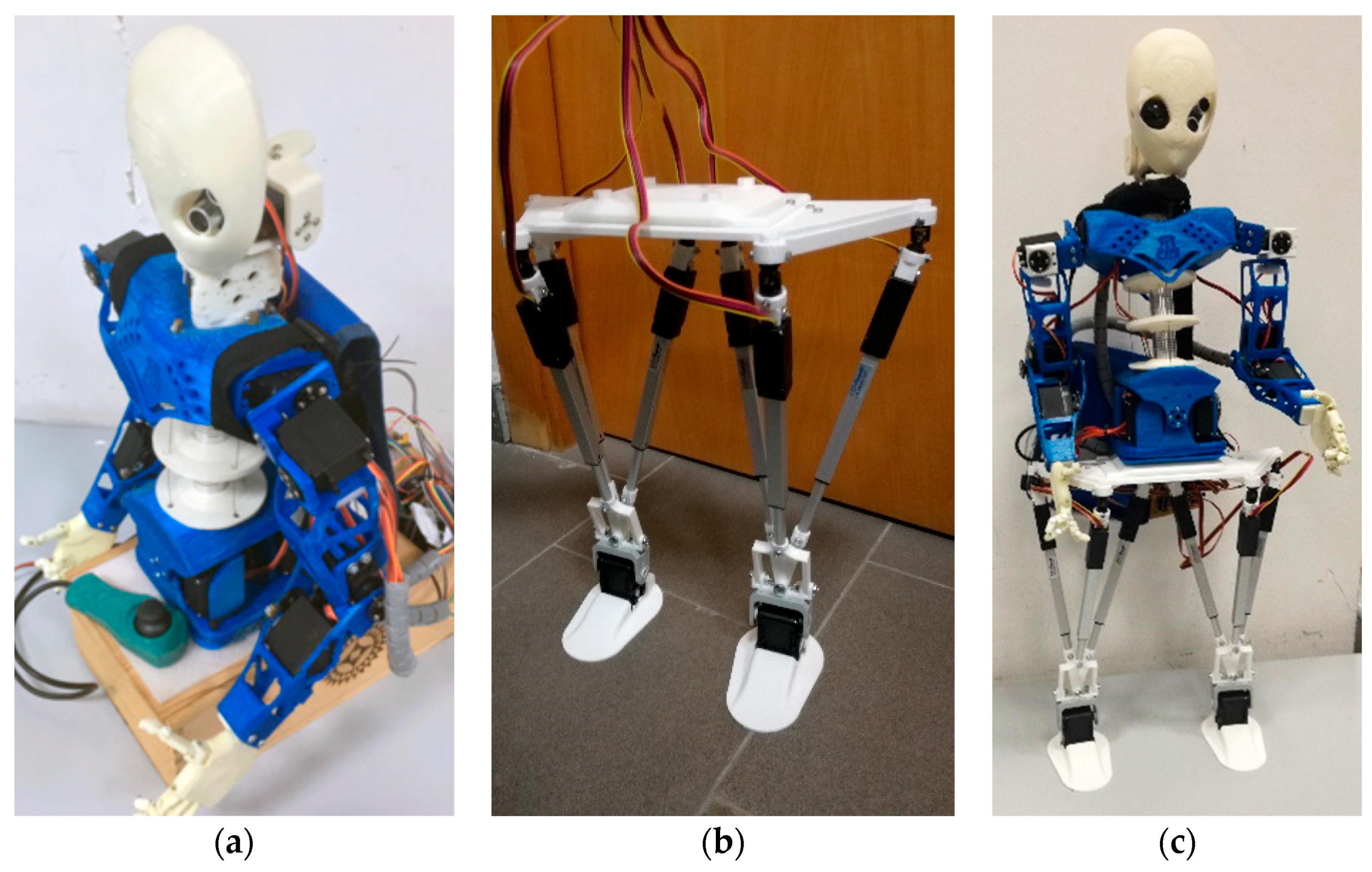
3. Prototype Construction
4. Control and Sensing
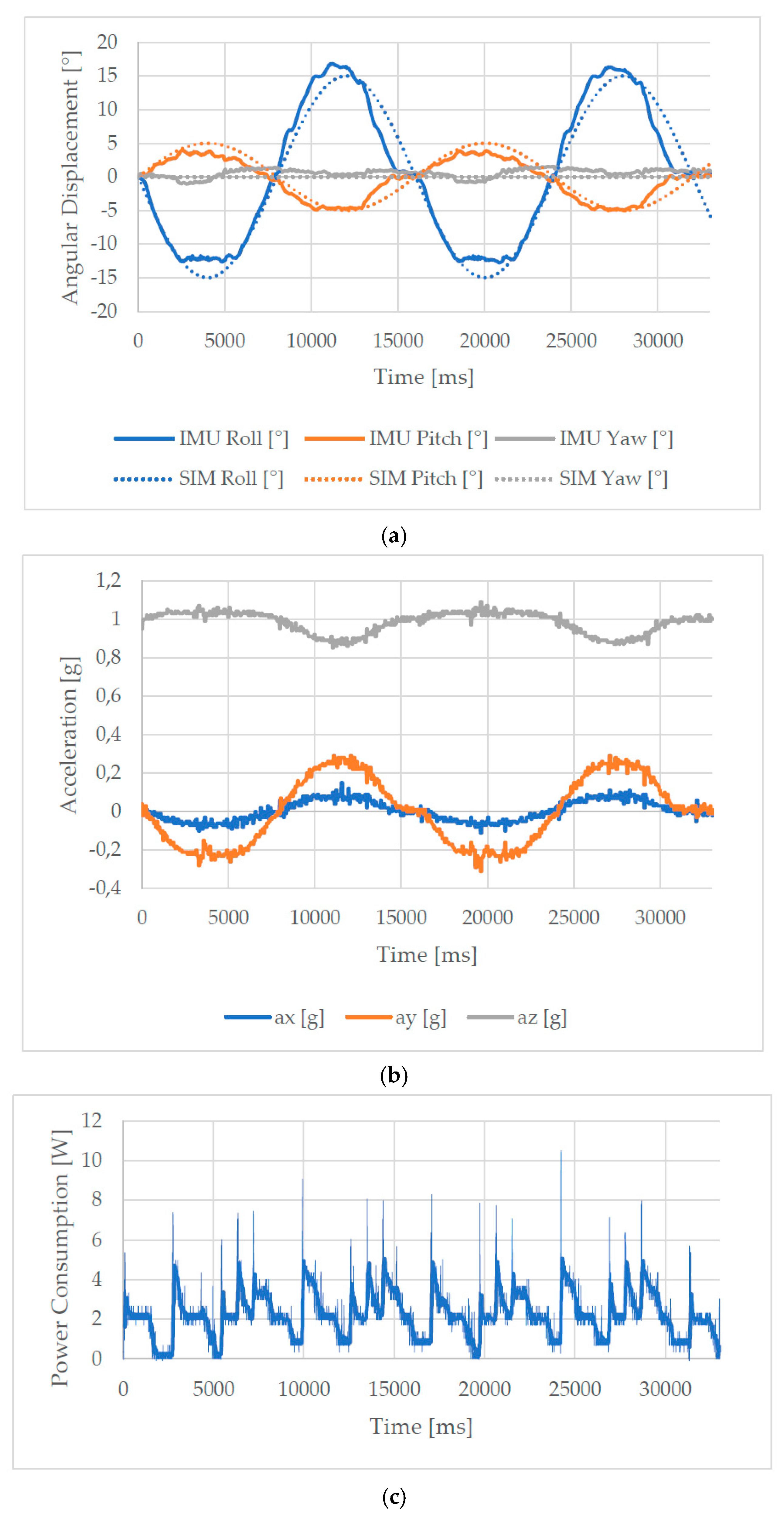
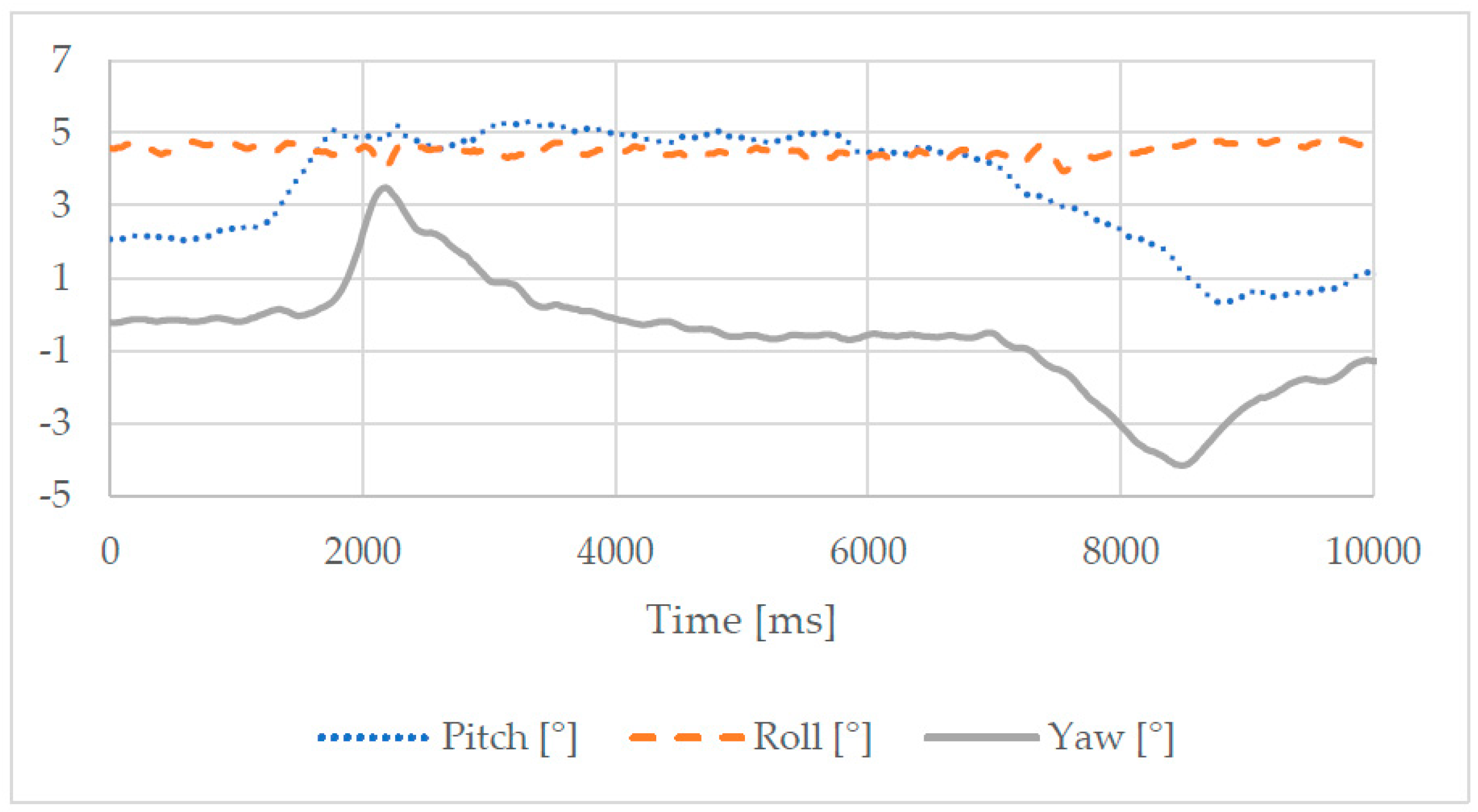
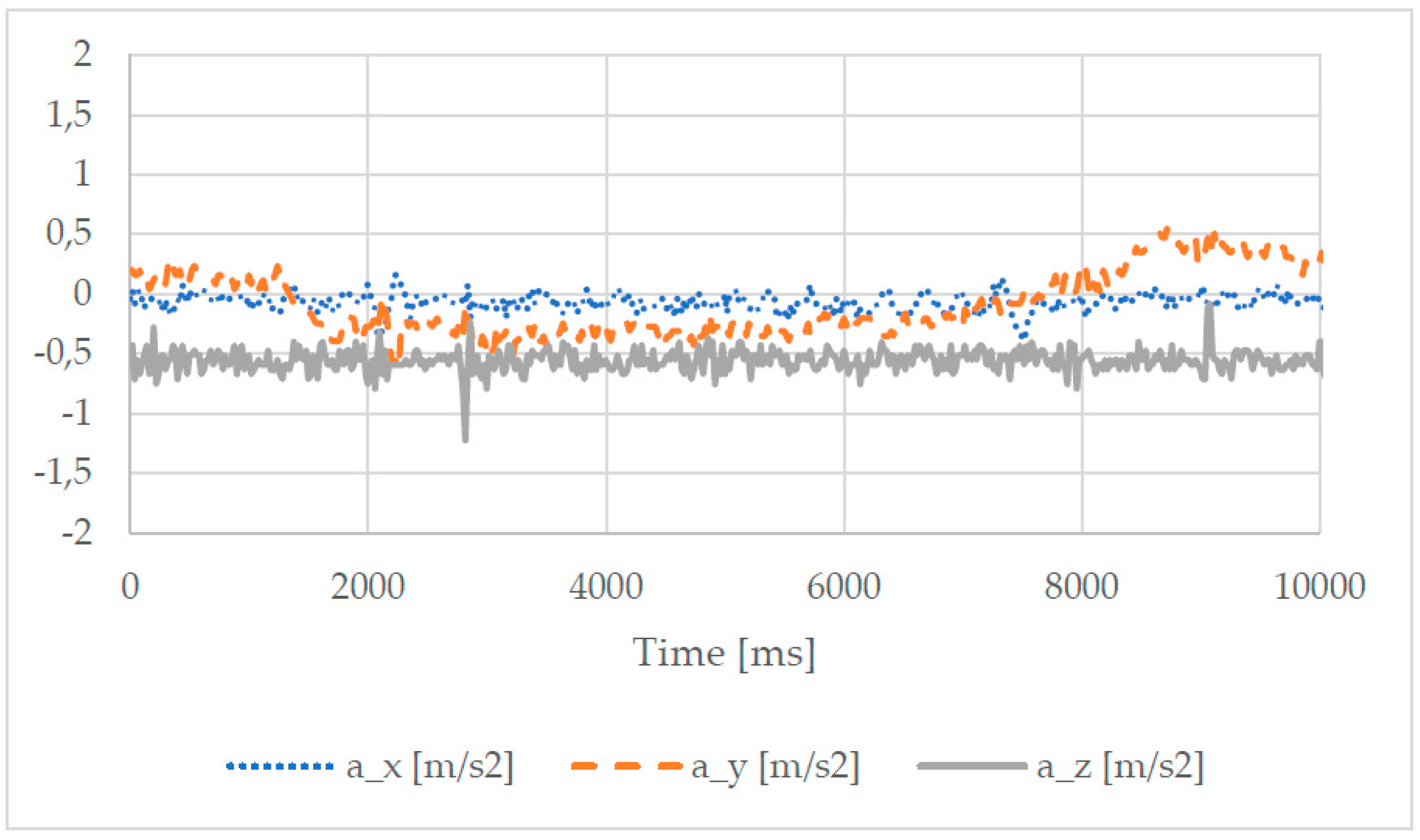
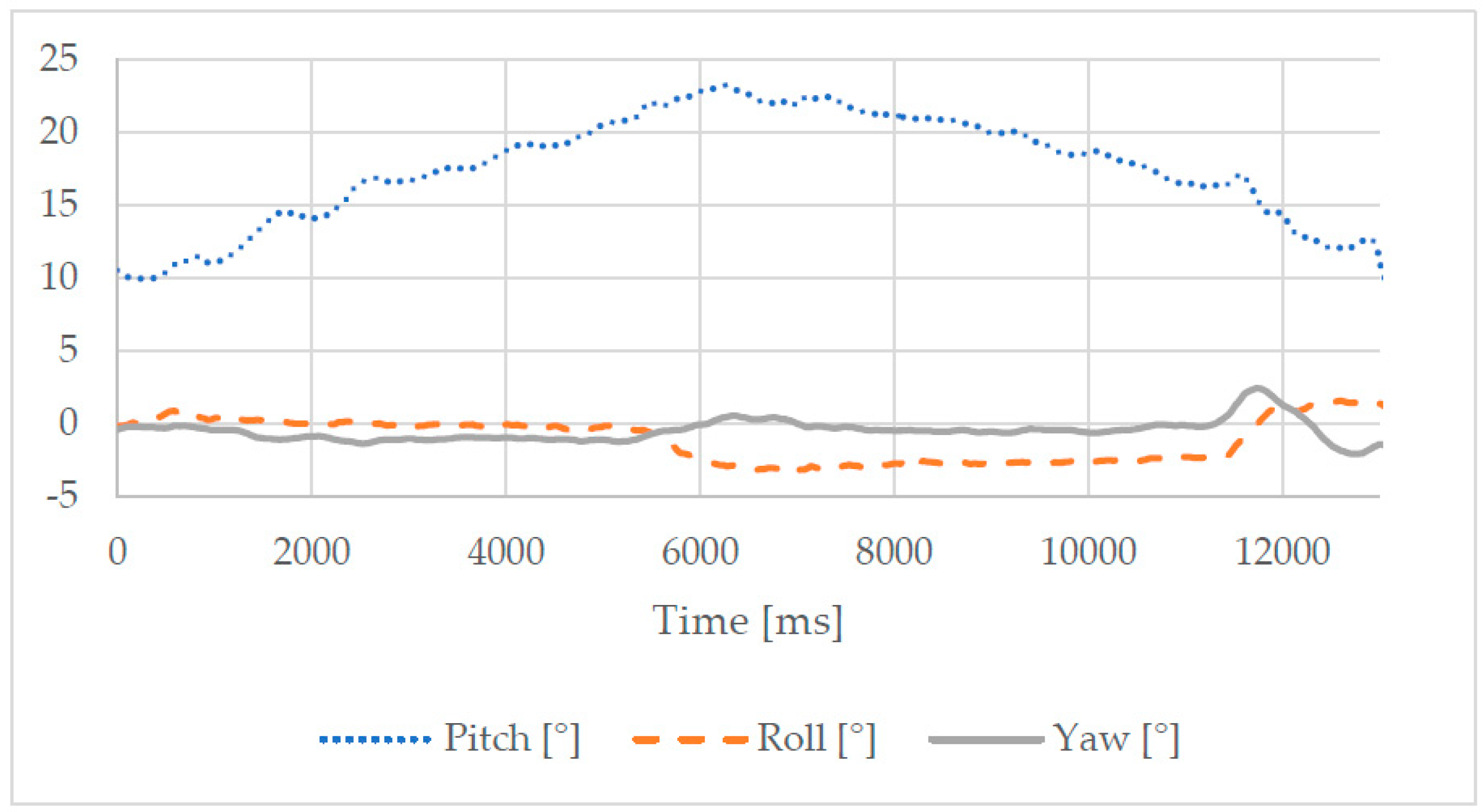
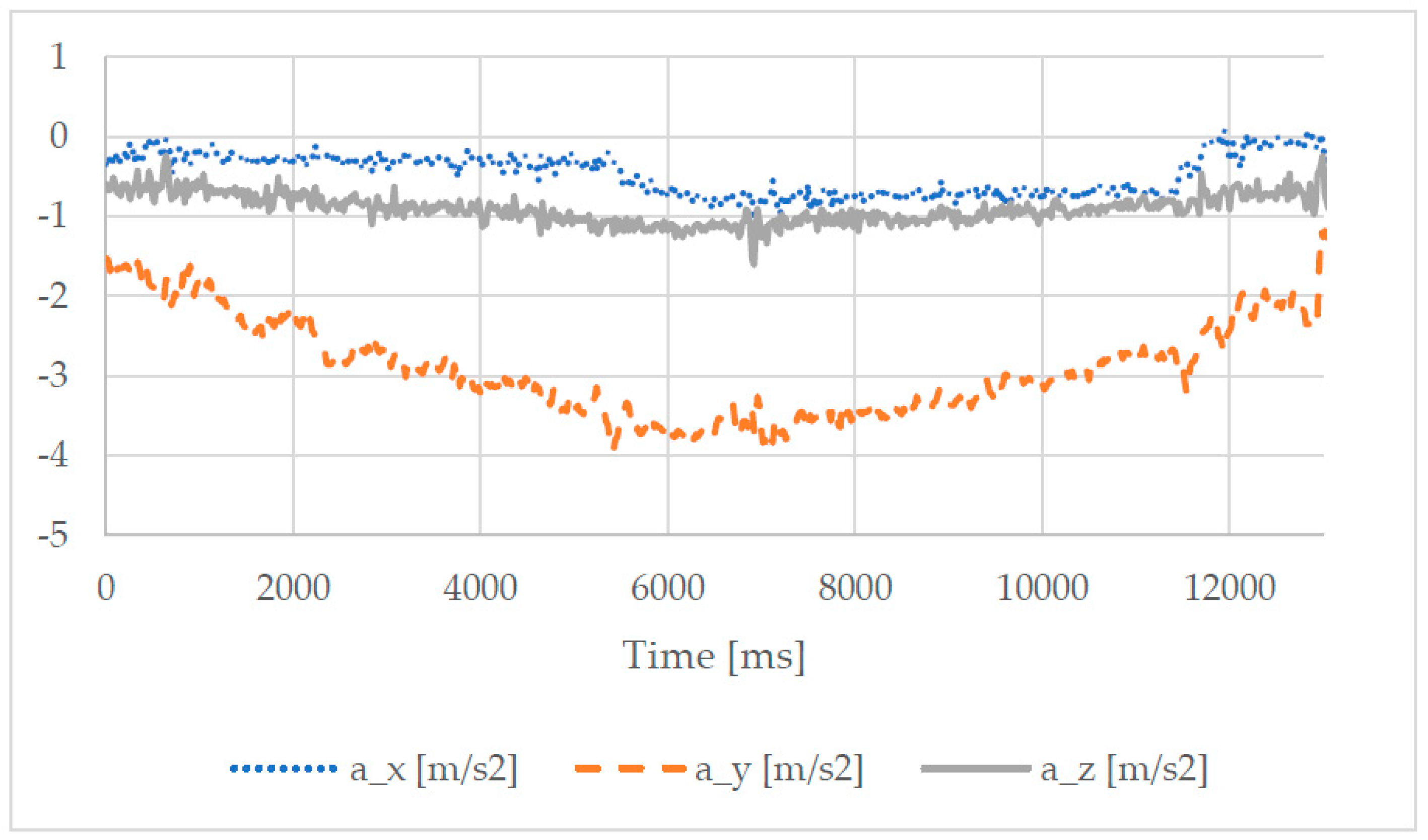
5. Experimental Validation
6. Conclusions
7. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Lim, H.O.; Takanishi, A. Biped walking robots created at Waseda University: WL and WABIAN family. Philos. Trans. R. Soc. Lond. A 2007, 365, 49–64. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kulk, J.; Welsh, J. A low power walk for the NAO robot. In Proceedings of the 2008 Australasian Conference on Robotics & Automation (ACRA-2008), Canberra, Australia, 3–5 December 2008; Kim, J., Mahony, R., Eds.; pp. 1–7. [Google Scholar]
- Metta, G.; Natale, L.; Nori, F.; Sandini, G.; Vernon, D.; Fadiga, L.; Bernardino, A. The iCub humanoid robot: An open-systems platform for research in cognitive development. Neural Netw. 2010, 23, 1125–1134. [Google Scholar] [CrossRef] [PubMed]
- Tsagarakis, N.G.; Caldwell, D.G.; Negrello, F.; Choi, W.; Baccelliere, L.; Loc, V.G.; Natale, L. WALK-MAN: A High-Performance Humanoid Platform for Realistic Environments. J. Field Robot. 2017, 34, 1225–1259. [Google Scholar] [CrossRef]
- Lafaye, J.; Gouaillier, D.; Wieber, P.B. Linear model predictive control of the locomotion of Pepper, a humanoid robot with omnidirectional wheels. In Proceedings of the IEEE 2014 14th IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 336–341. [Google Scholar]
- Ogura, Y.; Aikawa, H.; Shimomura, K.; Morishima, A.; Lim, H.O.; Takanishi, A. Development of a new humanoid robot WABIAN-2. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 76–81. [Google Scholar]
- Jung, H.W.; Seo, Y.H.; Ryoo, M.S.; Yang, H.S. Affective communication system with multimodality for a humanoid robot, AMI. In Proceedings of the 2004 4th IEEE/RAS International Conference on Humanoid Robots, Santa Monica, CA, USA, 10–12 November 2004; Volume 2, pp. 690–706. [Google Scholar]
- Tellez, R.; Ferro, F.; Garcia, S.; Gomez, E.; Jorge, E.; Mora, D.; Pinyol, D.; Oliver, J.; Torres, O.; Velazquez, J.; et al. Reem-B: An autonomous lightweight human-size humanoid robot. In Proceedings of the IEEE 8th IEEE-RAS International Conference on Humanoid Robots, Daejeon, Korea, 1–3 December 2008; pp. 462–468. [Google Scholar]
- Asfour, T.; Regenstein, K.; Azad, P.; Schroder, J.; Bierbaum, A.; Vahrenkamp, N.; Dillmann, R. ARMAR-III: An integrated humanoid platform for sensory-motor control. In Proceedings of the 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 169–175. [Google Scholar]
- Asfour, T.; Schill, J.; Peters, H.; Klas, C.; Bücker, J.; Sander, C.; Bartenbach, V. Armar-4: A 63 DOF torque controlled humanoid robot. In Proceedings of the 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 390–396. [Google Scholar]
- Cafolla, D.; Wang, M.F.; Carbone, G.; Ceccarelli, M. LARMbot: A new humanoid robot with parallel mechanisms. In Romansy 21—Robot Design, Dynamics and Control: Proceedings of the 21st Cism-Iftomm Symposium, June 20–23, Udine, Italy; Springer International Publishing: Cham, Switzerland, 2016; pp. 275–284. [Google Scholar]
- Ceccarelli, M.; Cafolla, D.; Russo, M.; Carbone, G. LARMBot Humanoid Design towards a Prototype. MOJ Appl. Bionics Biomech. 2017, 1, 48–49. [Google Scholar] [CrossRef]
- Cafolla, D.; Ceccarelli, M. Design and simulation of a cable-driven vertebra-based humanoid torso. Int. J. Humanoid Robot. 2016, 13, 1650015-1–1650015-27. [Google Scholar] [CrossRef]
- Cafolla, D.; Ceccarelli, M. An Experimental Validation of a Novel Humanoid Torso. Robot. Auton. Syst. 2017. [Google Scholar] [CrossRef]
- Wang, M.; Ceccarelli, M. Design and simulation of walking operation of a cassino biped locomotor. In New Trends in Mechanism and Machine Science; Springer International Publishing: Cham, Switzerland, 2015; pp. 613–621. [Google Scholar]
- Russo, M.; Ceccarelli, M.; Takeda, Y. Force transmission and constraint analysis of a 3-SPR parallel manipulator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017. [Google Scholar] [CrossRef]
- Russo, M.; Herrero, S.; Altuzarra, O.; Ceccarelli, M. Kinematic Analysis and multi-objective optimization of a 3-UPR parallel mechanism for a robotic leg. Mech. Mach. Theory 2018, 120, 192–202. [Google Scholar] [CrossRef]
- Cafolla, D.; Chen, I.M.; Ceccarelli, M. An experimental characterization of human torso motion. Front. Mech. Eng. 2015, 10, 311–325. [Google Scholar] [CrossRef]
- Ceccarelli, M.; Carbone, G.; Cafolla, D.; Wang, M. How to Use 3D Printing for Feasibility Check of Mechanism Design. In Advances in Robot Design and Intelligent Control; Borangiu, T., Ed.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 371. [Google Scholar]
- Arduino Nano Datasheet. Available online: https://store.arduino.cc/arduino-nano (accessed on 16 November 2018).
- Adafruit PWM Servo Driver Datasheet. Available online: https://www.adafruit.com/product/815 (accessed on 16 November 2018).
- Actuonix L12R Linear Servomotor Datasheet. Available online: https://www.actuonix.com/L12-R-Linear-Servo-For-Radio-Control-p/l12-r.htm (accessed on 16 November 2018).
- MG 995 Servomotor Datasheet. Available online: https://www.towerpro.com.tw/product/mg995/ (accessed on 16 November 2018).
- Adafruit IMU Datasheet. Available online: https://www.adafruit.com/product/3463 (accessed on 16 November 2018).
- Collins, S.H.; Ruina, A. A bipedal walking robot with efficient and human-like gait. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Russo, M.; Ceccarelli, M. Kinematic design of a tripod parallel mechanism for robotic legs. In Mechanisms, Transmissions and Applications; Mechanism and Machine Science; Springer: Cham, Switzerland, 2018; Volume 52, pp. 121–130. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Abbr. | W (mm) | D (mm) | H (mm) | Mass (kg) | Actuators |
|---|---|---|---|---|---|---|
| Left Leg | LL | 160 | 150 | 400 | 0.5 | 3 leg, 1 ankle |
| Right Leg | RL | 160 | 150 | 400 | 0.5 | 3 leg, 1 ankle |
| Torso | TO | 200 | 150 | 300 | 1.2 | 4 cables |
| Left Arm | LA | 60 | 60 | 360 | 0.5 | 3 arm, 1 hand |
| Right Arm | RA | 60 | 60 | 360 | 0.5 | 3 arm, 1 hand |
| Head | HD | 95 | 150 | 150 | 0.4 | 2 neck |
| LARMbot | - | 320 | 150 | 850 | 3.6 | 22 |
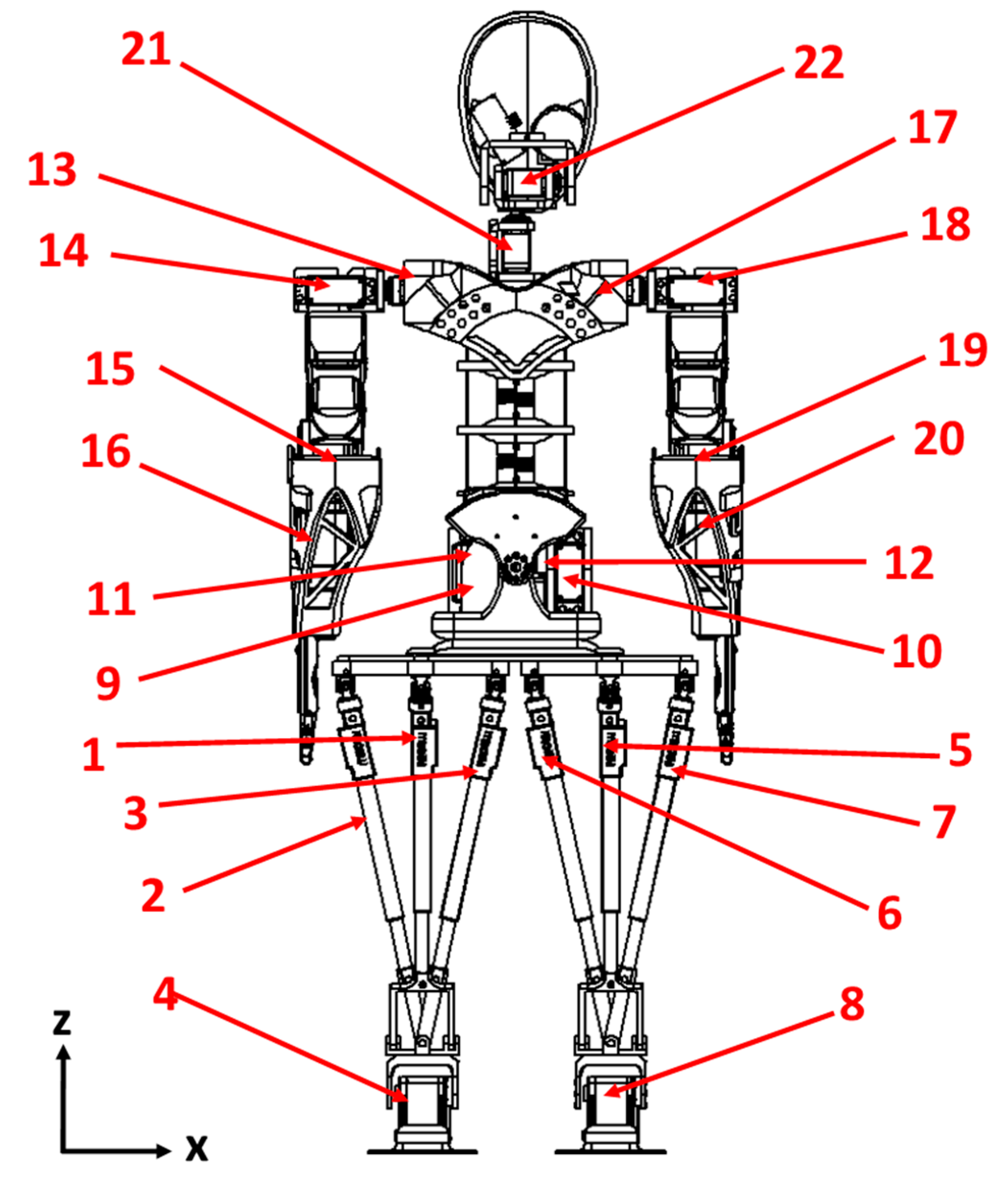
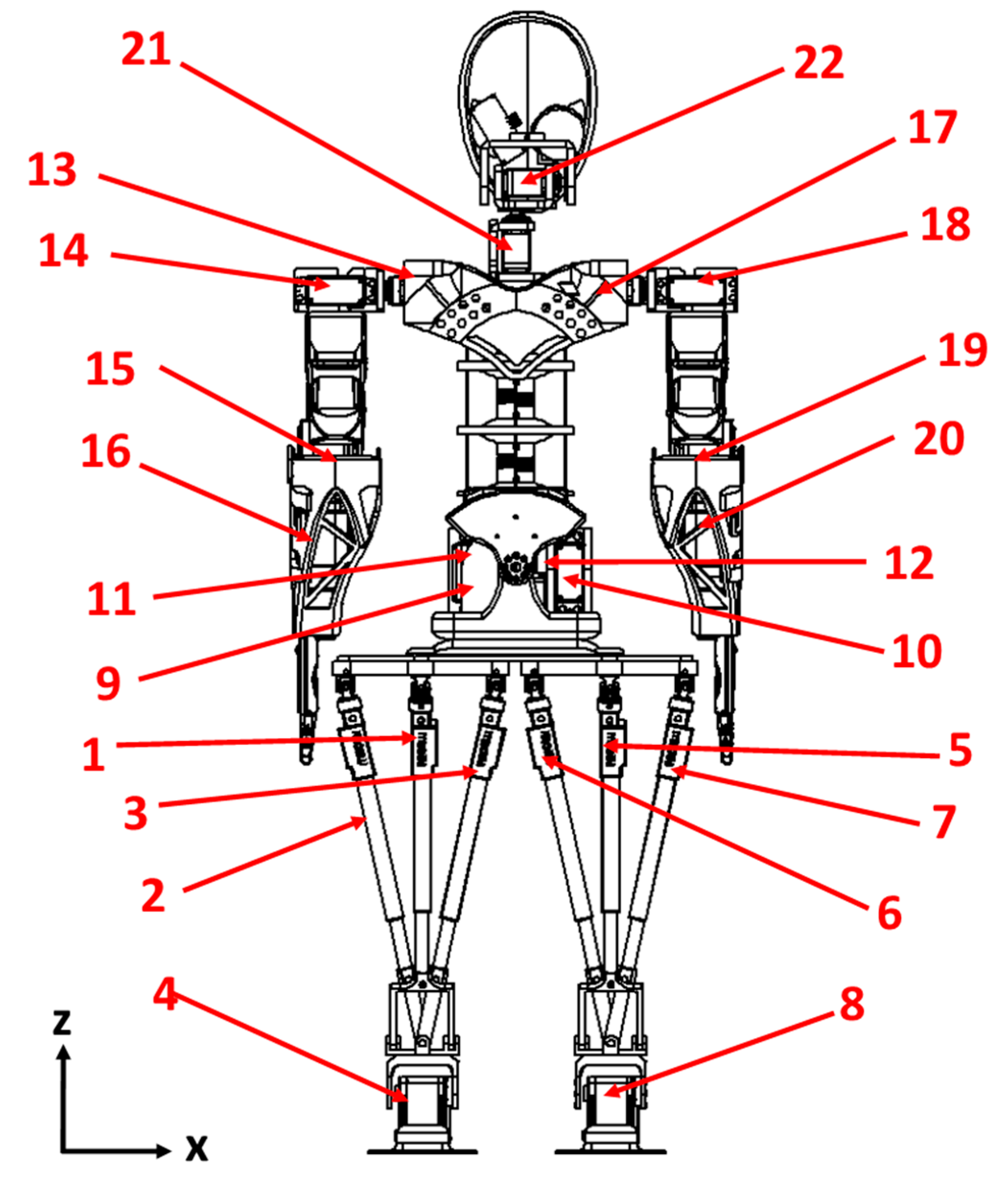
| DoF | Location | Description | Force/Torque | DoF | Location | Description | Force/Torque |
|---|---|---|---|---|---|---|---|
| q1 | LL | Linear actuator B | 36 N (4.5 mm/s) | q12 | TO | Cable servomotor FR | 1.08 Nm |
| q2 | LL | Linear actuator L | 36 N (4.5 mm/s) | q13 | LA | Shoulder motor 1 | 1.08 Nm |
| q3 | LL | Linear actuator R | 36 N (4.5 mm/s) | q14 | LA | Shoulder motor 2 | 1.08 Nm |
| q4 | LL | Ankle servomotor | 1.08 Nm | q15 | LA | Elbow motor | 1.08 Nm |
| q5 | RL | Linear actuator B | 36N (4.5 mm/s) | q16 | LA | Hand motor | 1.08 Nm |
| q6 | RL | Linear actuator L | 36N (4.5 mm/s) | q17 | RA | Shoulder motor 1 | 1.08 Nm |
| q7 | RL | Linear actuator R | 36N (4.5 mm/s) | q18 | RA | Shoulder motor 2 | 1.08 Nm |
| q8 | RL | Ankle servomotor | 1.08 Nm | q19 | RA | Elbow motor | 1.08 Nm |
| q9 | TO | Cable servomotor BL | 1.08 Nm | q20 | RA | Hand motor | 1.08 Nm |
| q10 | TO | Cable servomotor BR | 1.08 Nm | q21 | HE | Neck motor 1 | 1.08 Nm |
| q11 | TO | Cable servomotor FL | 1.08 Nm | q22 | HE | Neck motor 2 | 1.08 Nm |
| Test Mode | Payload | Appl. Point | Moving Parts | Sensors |
|---|---|---|---|---|
| 1 | 0.00 kg | - | Legs, Torso | IMU, Current Sensor |
| 2 | 1.00 kg | Back | Legs, Torso | IMU, Current Sensor |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russo, M.; Cafolla, D.; Ceccarelli, M. Design and Experiments of a Novel Humanoid Robot with Parallel Architectures. Robotics 2018, 7, 79. https://doi.org/10.3390/robotics7040079
Russo M, Cafolla D, Ceccarelli M. Design and Experiments of a Novel Humanoid Robot with Parallel Architectures. Robotics. 2018; 7(4):79. https://doi.org/10.3390/robotics7040079
Chicago/Turabian StyleRusso, Matteo, Daniele Cafolla, and Marco Ceccarelli. 2018. "Design and Experiments of a Novel Humanoid Robot with Parallel Architectures" Robotics 7, no. 4: 79. https://doi.org/10.3390/robotics7040079
APA StyleRusso, M., Cafolla, D., & Ceccarelli, M. (2018). Design and Experiments of a Novel Humanoid Robot with Parallel Architectures. Robotics, 7(4), 79. https://doi.org/10.3390/robotics7040079